Load Frequency Control of Pumped Storage Power Station Based on LADRC

 ,
,
Abstract
1. Introduction
2. The System Model
2.1. The Unit Model
2.2. Area Control Error
- 1.
- Flat Frequency Control (FFC):
- 2.
- Tie-Line and Frequency Bias Control (TBC):
2.3. Nonlinear Links
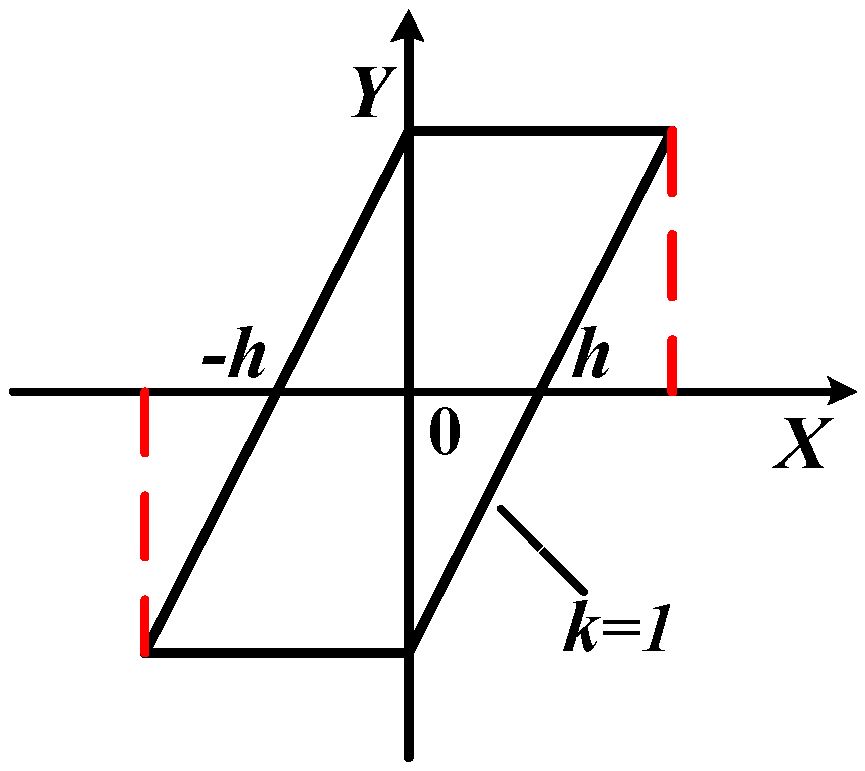
2.3.1. Dead Zone of Governor
2.3.2. Generation Rate Constrains
3. Model of Pumped Storage Power Station
3.1. Tie-Line Model
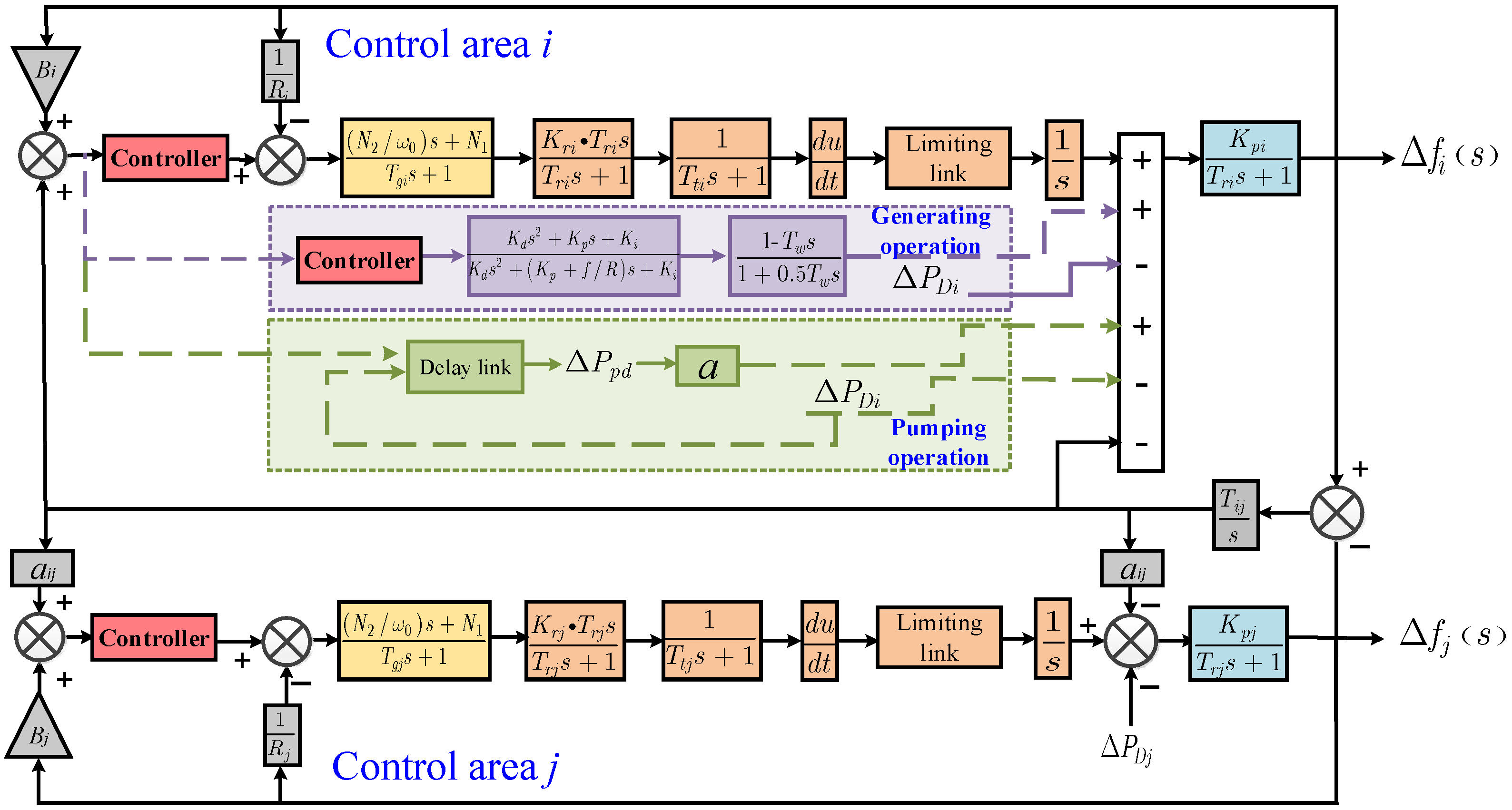
3.2. Two-Area LFC Model
3.3. Model of Pumped Storage Power Station
4. Controller Design
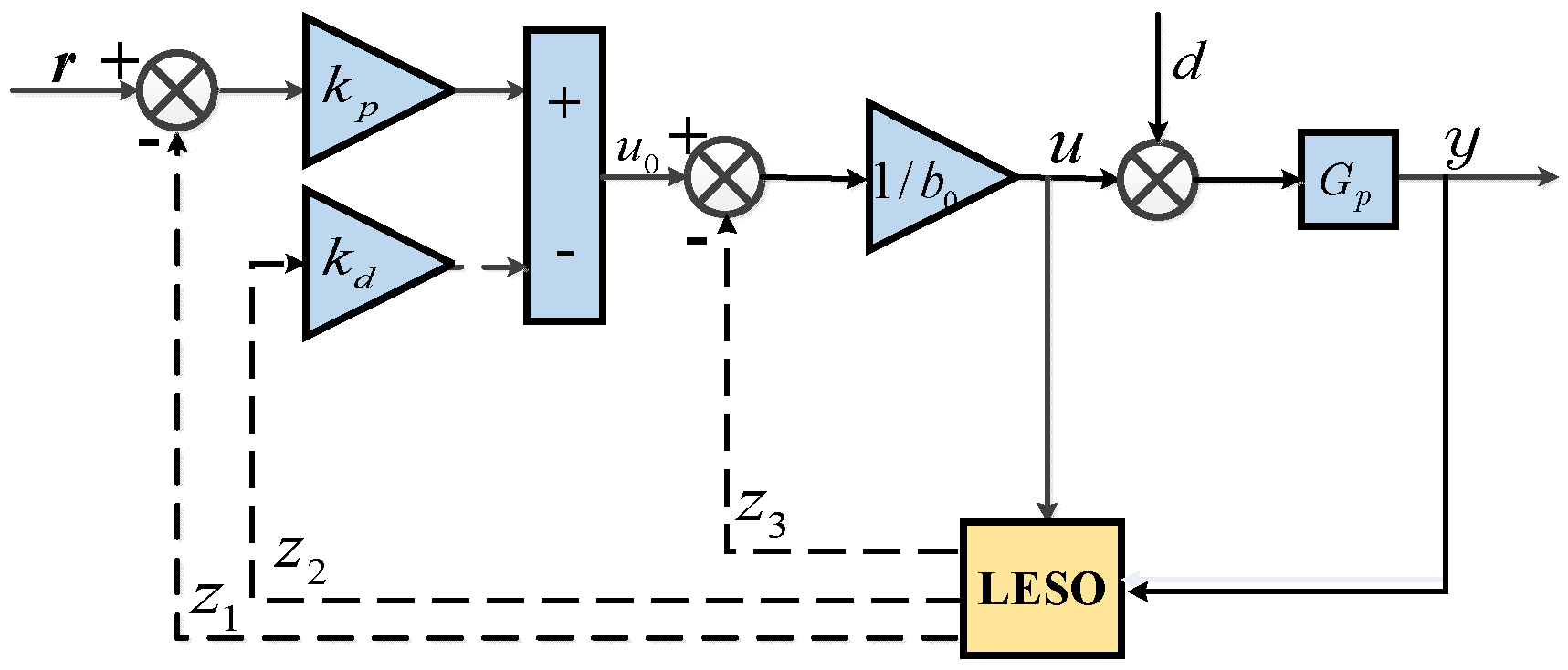
4.1. Linear Extended State Observer
4.2. Disturbance Compensation
4.3. Linear Feedback Control
5. The Simulation Analysis
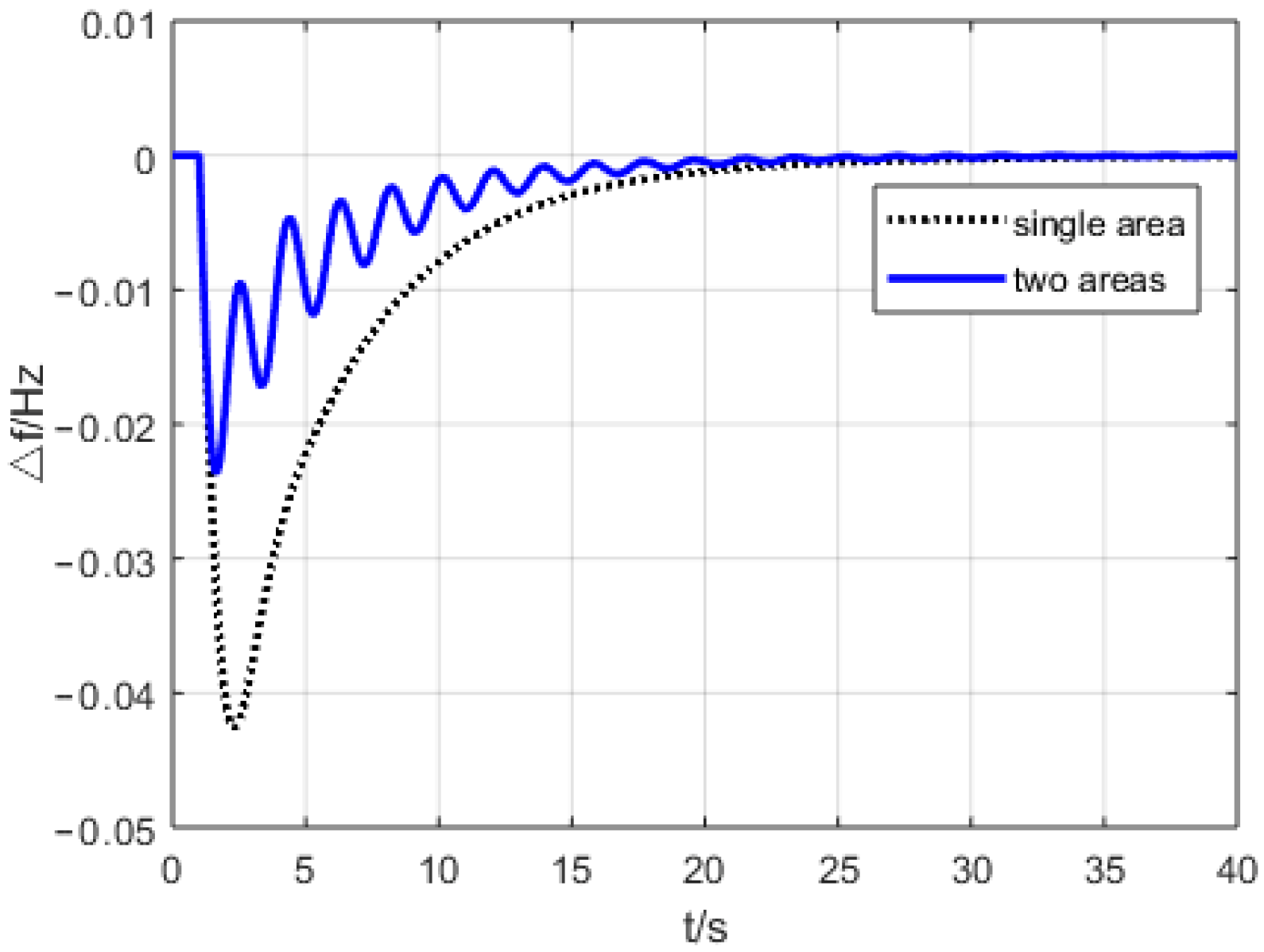
5.1. Simulation of Load Frequency Control in Single and Two-Area
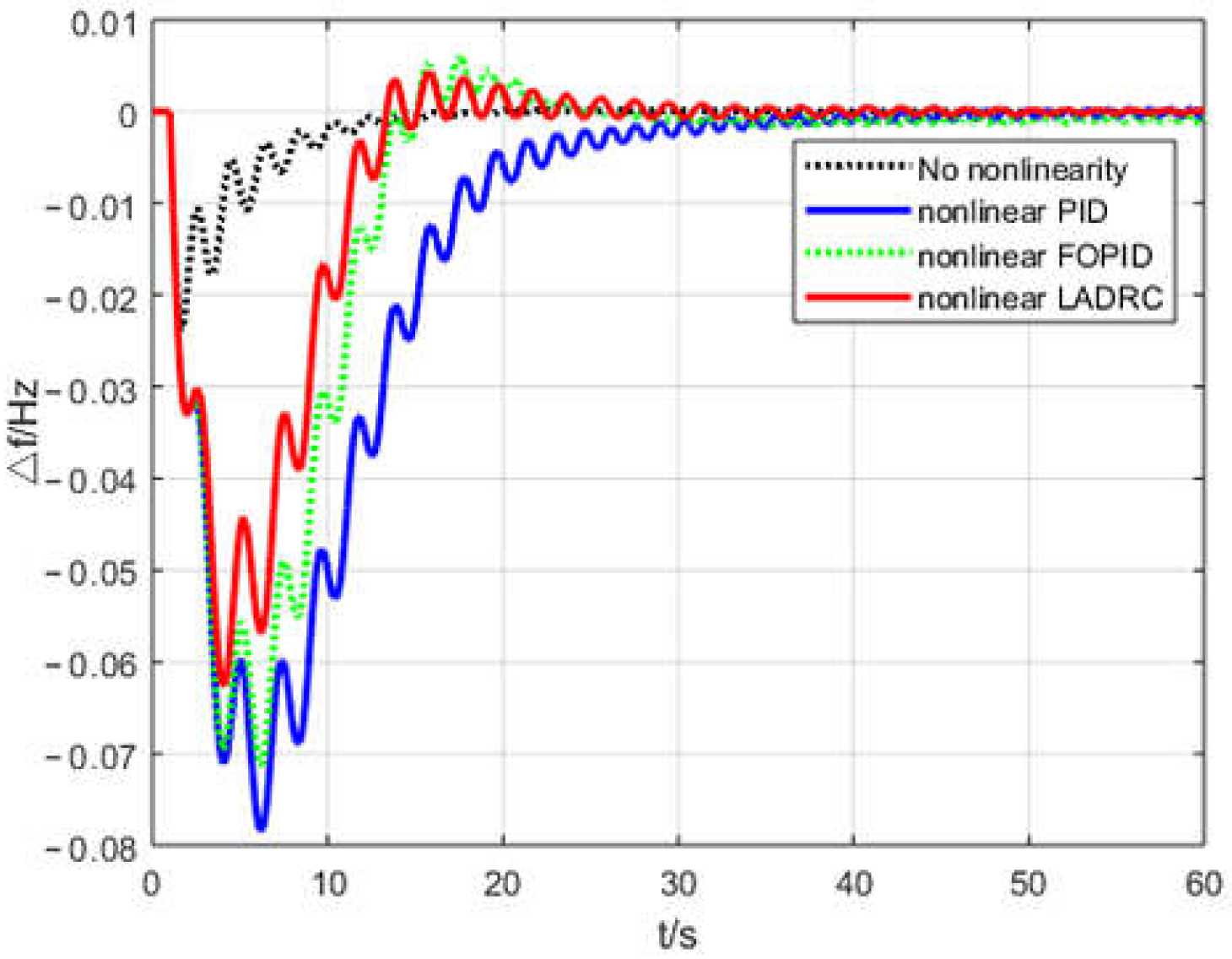
5.2. Simulation of Two-Area LFC Considering Nonlinearity
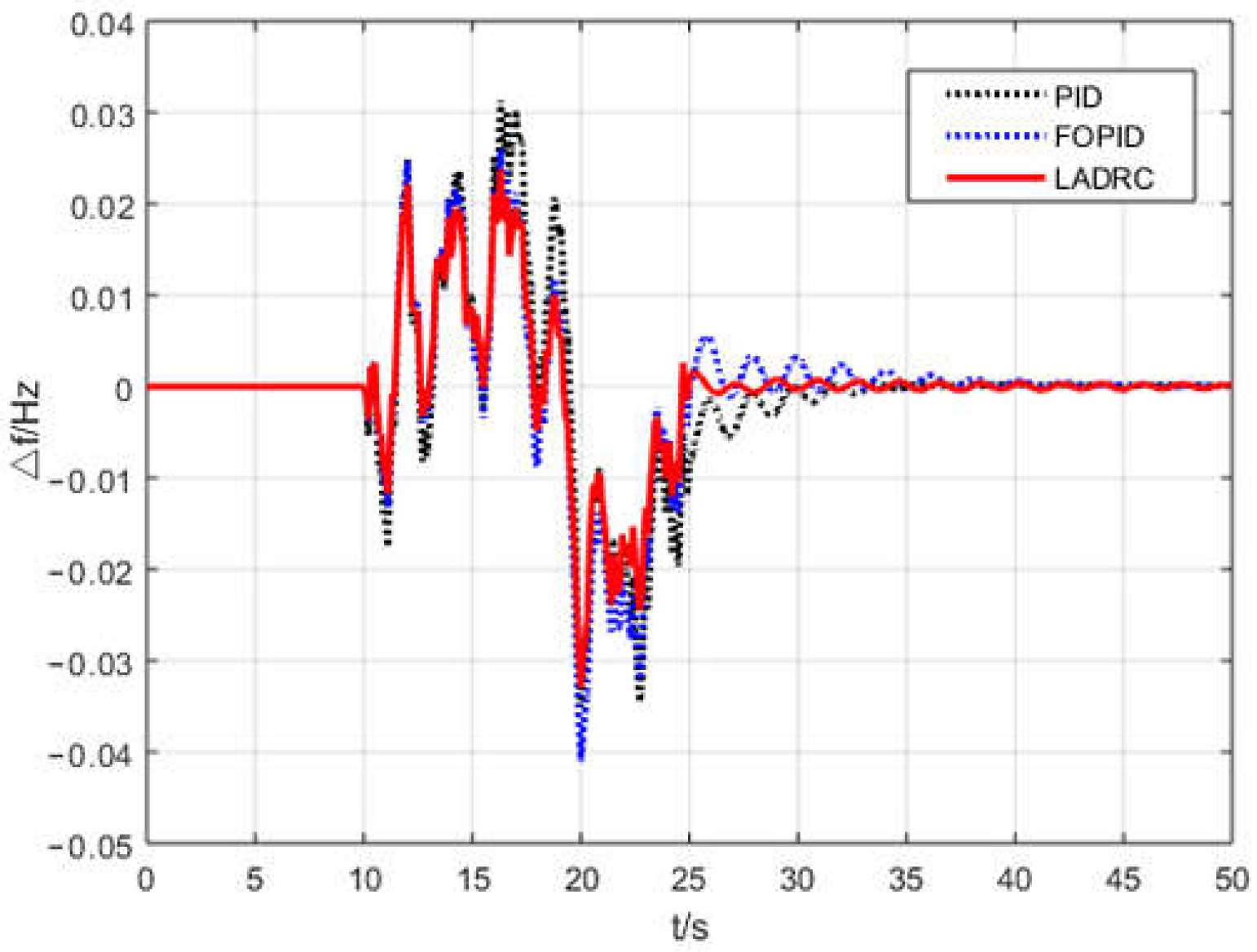
5.2.1. Simulation of LFC under Random Disturbance
5.2.2. Stability and Robustness Analysis of Different Control Methods
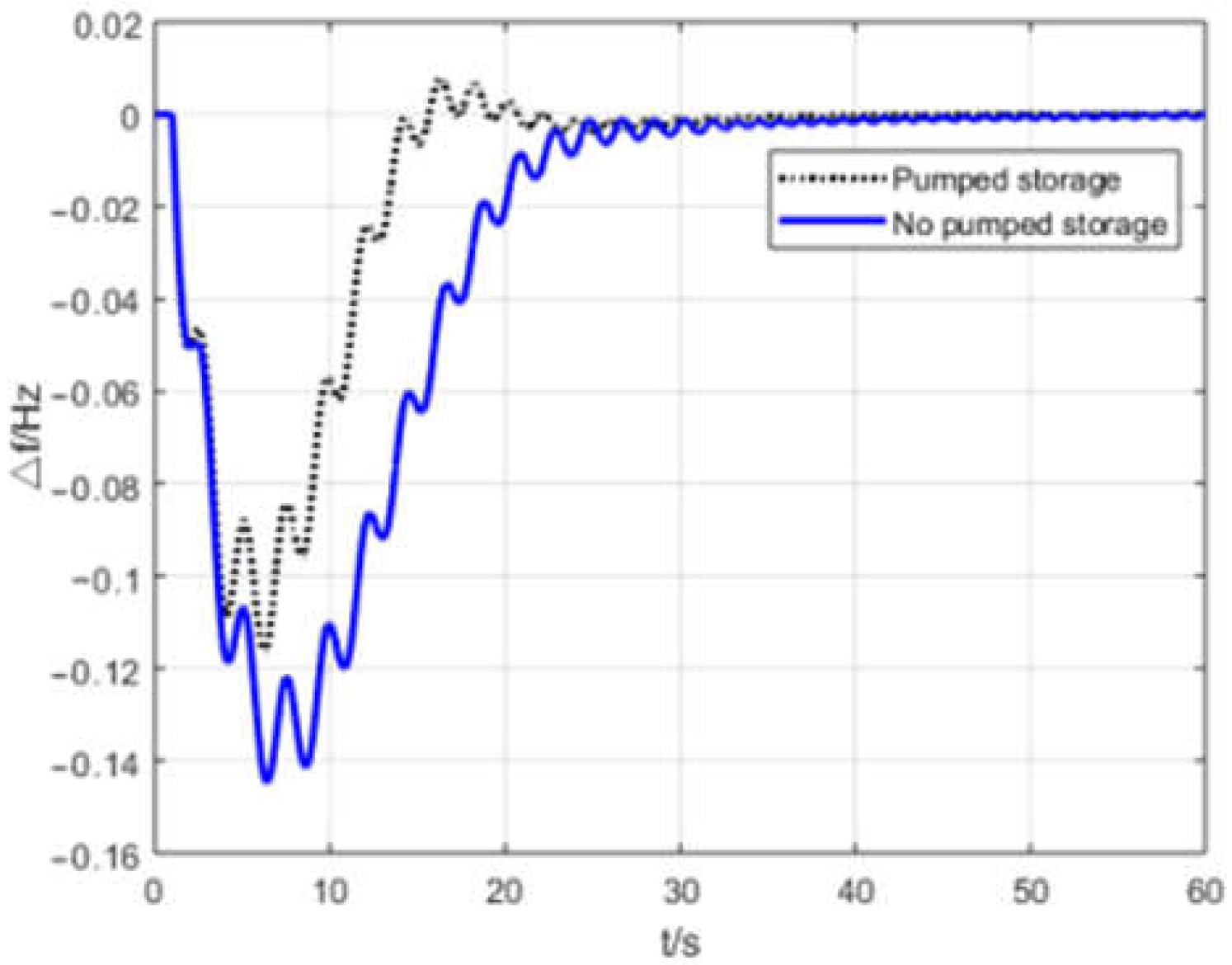
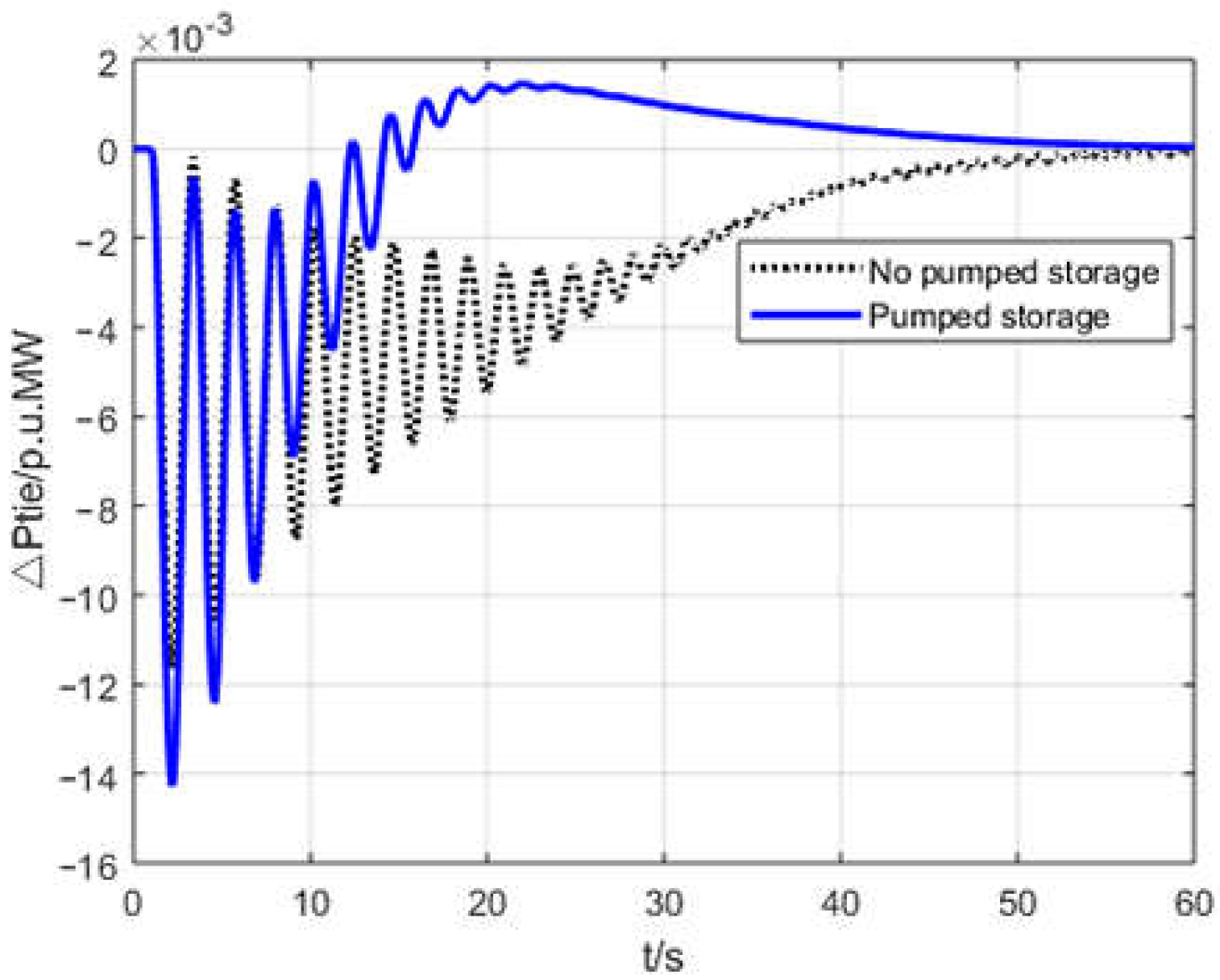
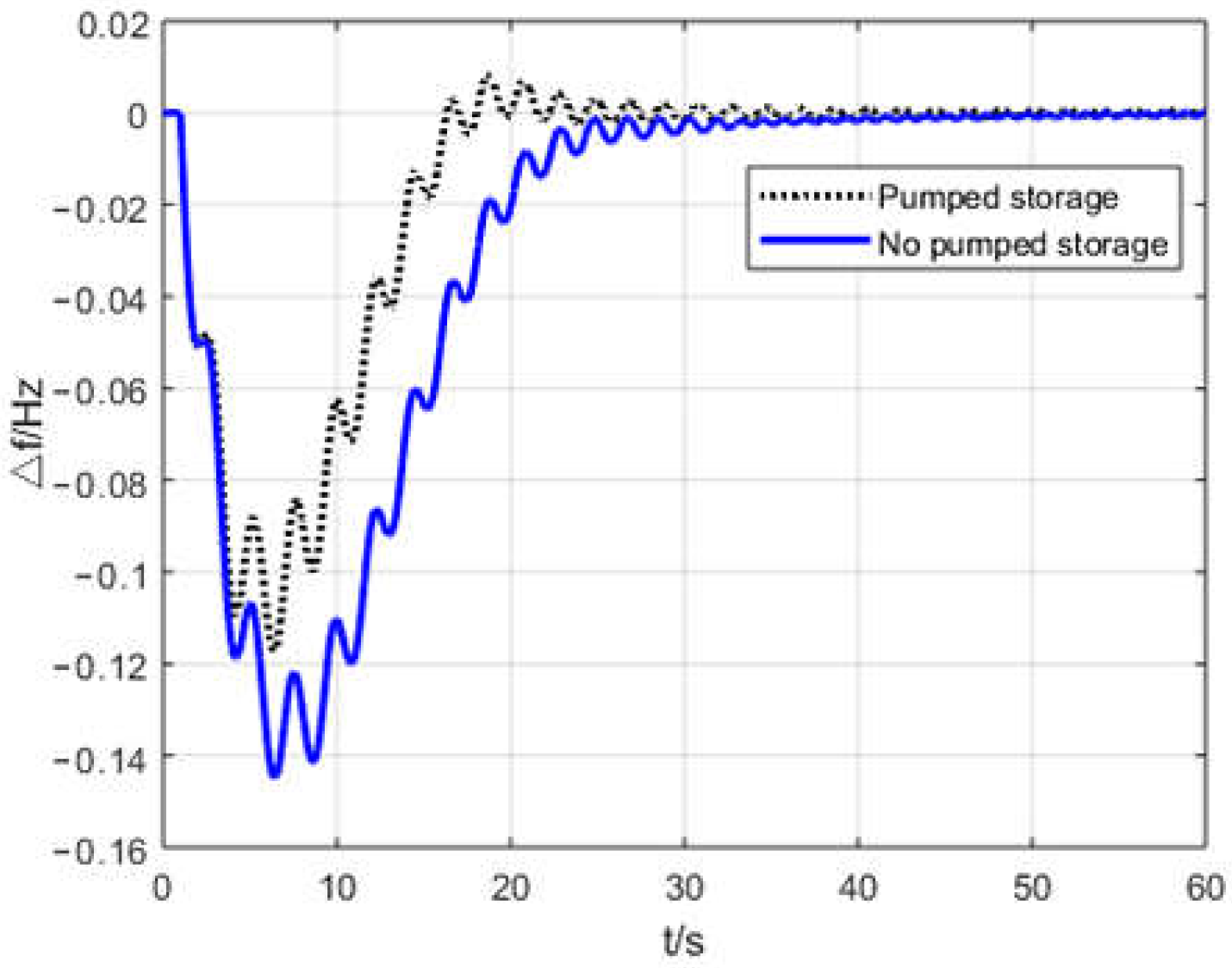
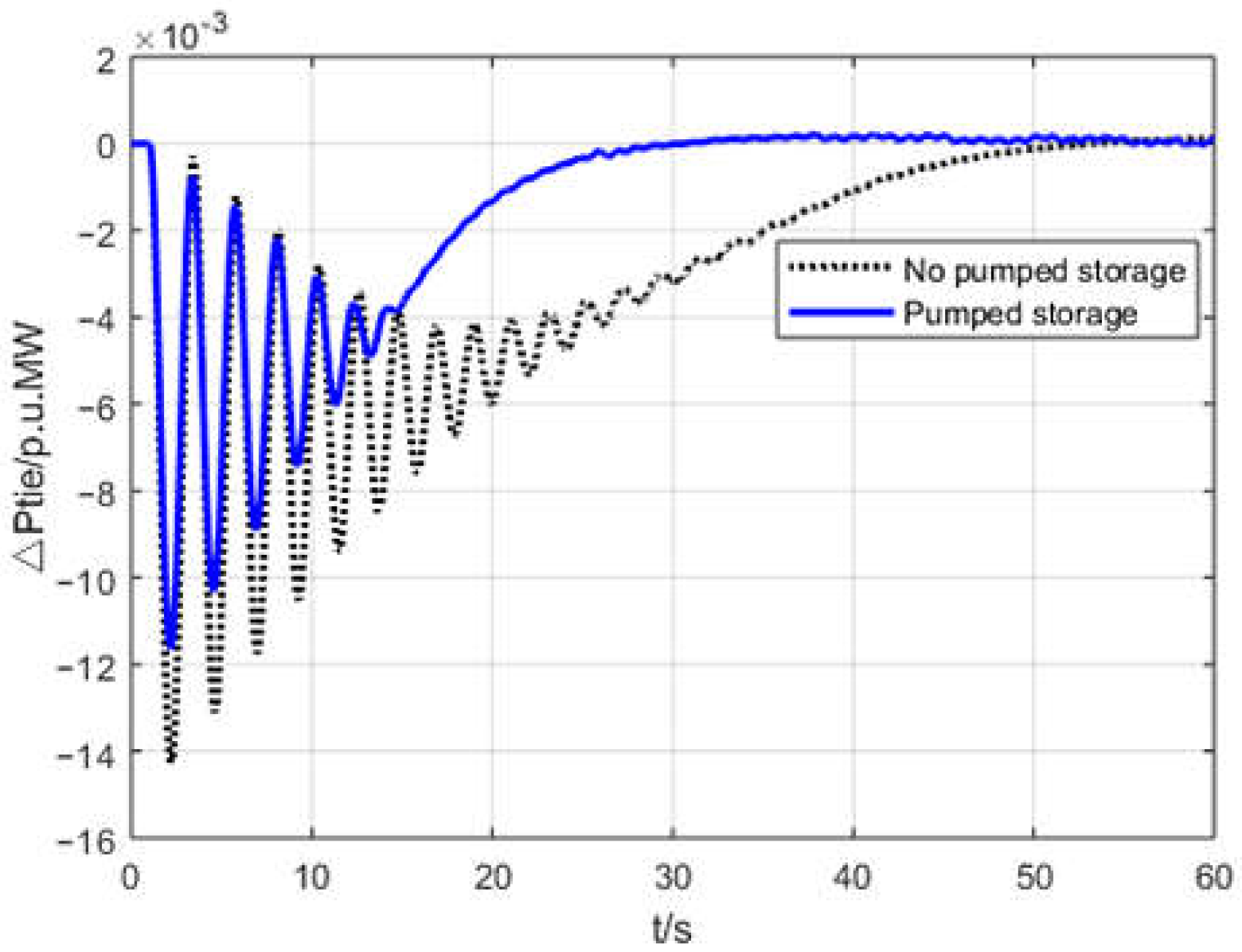
5.3. LFC Simulation of Pumped Storage Power Station
5.3.1. Generating Operation
5.3.2. Pumping Operation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shi, Z.; Li, Q.; Huang, B.; Hong, B. Research on distributed energy storage operation mode and technical economy under the background of energy internet. IOP Conf. Ser. Mater. Sci. Eng. 2019, 486, 012077. [Google Scholar] [CrossRef]
- Sinsel, S.; Riemke, R.L.; Hoffmann, V.H. Challenges and solution technologies for the integration of variable renewable energy sources—A review. Renew. Energy 2020, 145, 2271–2285. [Google Scholar] [CrossRef]
- Laghari, J.; Mokhlis, H.; Abu Bakar, A.H.; Mohamad, H. A fuzzy based load frequency control for distribution network connected with mini hydro power plant. J. Intell. Fuzzy Syst. 2014, 26, 1301–1310. [Google Scholar] [CrossRef]
- Pérez-Díaz, J.I.; Sarasúa, J.I.; Wilhelmi, J.R. Contribution of a hydraulic short-circuit pumped-storage power plant to the load–frequency regulation of an isolated power system. Int. J. Electr. Power Energy Syst. 2014, 62, 199–211. [Google Scholar] [CrossRef]
- Singh, V.P.; Samuel, P.; Kishor, N. Impact of demand response for frequency regulation in two-area thermal power system. Int. Trans. Electr. Energy Syst. 2016, 27, e2246. [Google Scholar] [CrossRef]
- Li, J.; Sun, W.; Shi, Y.; Li, H.; Li, W.; Li, N.; Hua, F. Optimization and promotion of automatic generation control strategy under large-scale wind power. IOP Conf. Ser. Earth Environ. Sci. 2018, 186, 012026. [Google Scholar] [CrossRef]
- Plotnikova, T.V.; Sokur, P.V.; Tuzov, P.Y.; Shakaryan, Y.G.; Kuleshov, M.A. Participation of a pumped-storage electric power plant with asynchronous generator-motors in normalized primary frequency regulation. Power Technol. Eng. 2015, 49, 223–228. [Google Scholar] [CrossRef]
- Wu, C.-C.; Lee, W.-J.; Cheng, C.-L.; Lan, H.-W. Role and value of pumped storage units in an ancillary services market for isolated power systems—Simulation in the Taiwan power system. IEEE Trans. Ind. Appl. 2008, 44, 1924–1929. [Google Scholar] [CrossRef]
- Papaefthymiou, S.V.; Karamanou, E.G.; Papathanassiou, S.A.; Papadopoulos, M.P. A wind-hydro-pumped storage station leading to high RES penetration in the autonomous island system of Ikaria. IEEE Trans. Sustain. Energy 2010, 1, 163–172. [Google Scholar] [CrossRef]
- Jin, Z.; Xu, L.; Ningbo, W. Study on control of pumped storage units for frequency regulation in power systems integrated with large-scale wind power generation. Proc. CSEE 2017, 37, 564–571. [Google Scholar]
- Fosha, C.; Elgerd, O. The megawatt-frequency control problem: A new approach via optimal control theory. IEEE Trans. Power Appar. Syst. 1970, 4, 563–577. [Google Scholar] [CrossRef]
- Nanda, J.; Mangla, A. Automatic generation control of an interconnected hydro-thermal system using conventional integral and fuzzy logic controller. In Proceedings of the 2004 IEEE International Conference on Electric Utility Deregulation, Restructuring and Power Technologies, Hong Kong, China, 5–8 April 2004; pp. 372–377. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Han, W.; Wang, G.; Stankovic, A.M. Active Disturbance Rejection Control in fully distributed Automatic Generation Control with co-simulation of communication delay. Control. Eng. Pr. 2019, 85, 225–234. [Google Scholar] [CrossRef]
- Dong, L.; Zhang, Y.; Gao, Z. A robust decentralized load frequency controller for interconnected power systems. ISA Trans. 2012, 51, 410–419. [Google Scholar] [CrossRef] [PubMed]
- Tan, W.; Hao, Y.; Li, N. Load frequency control in deregulated environments via active disturbance rejection. Int. J. Electr. Power Energy Syst. 2015, 66, 166–177. [Google Scholar] [CrossRef]
- Liu, F.; Li, Y.; Cao, Y.; She, J.; Wu, M. A two-layer active disturbance rejection controller design for load frequency control of interconnected power system. IEEE Trans. Power Syst. 2016, 31, 3320–3321. [Google Scholar] [CrossRef]
- Tan, W.; Chang, S.; Zhou, R. Load frequency control of power systems with non-linearities. IET Gener. Transm. Distrib. 2017, 11, 4307–4313. [Google Scholar] [CrossRef]
- Alomoush, M.I. Load frequency control and automatic generation control using fractional-order controllers. Electr. Eng. 2010, 91, 357–368. [Google Scholar] [CrossRef]
- Çam, E. Application of fuzzy logic for load frequency control of hydro electrical power plants. Energy Convers. Manag. 2007, 48, 1281–1288. [Google Scholar] [CrossRef]
- Nanda, J.; Sharma, D.; Mishra, S. Performance analysis of automatic generation control of interconnected power systems with delayed mode operation of area control error. J. Eng. 2015, 2015, 164–173. [Google Scholar] [CrossRef]
- Singh, O.; Nasiruddin, I. Hybrid evolutionary algorithm based fuzzy logic controller for automatic generation control of power systems with governor dead band non-linearity. Cogent Eng. 2016, 3, 1161286. [Google Scholar] [CrossRef]
- Das, D.; Nanda, J.; Kothari, M.L.; Kothari, D.P. Automatic generation control of a hydrothermal system with new area control error considering generation rate constraint. Electr. Mach. Power Syst. 1990, 18, 461–471. [Google Scholar] [CrossRef]
- Shen, Z.; Zhiqiang, G. Active disturbance rejection control for non-minimum phase systems. In Proceedings of the 29th China control conference, Beijing, China, 29–31 July 2010. [Google Scholar]
- Gao, Z. Active Disturbance Rejection Control: A paradigm shift in feedback control system design. In Proceedings of the American Control Conference IEEE, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Liu, K.; He, J.; Luo, Z.; Shen, X.; Liu, X.; Lu, T. Secondary frequency control of isolated microgrid based on LADRC. IEEE Access 2019, 7, 53454–53462. [Google Scholar] [CrossRef]
- Fang, J.; Tan, W.; Fu, C. Analysis and tuning of linear active disturbance rejection controller for load frequency control of power systems. In Proceedings of the 32nd Chinese Control Conference IEEE, Xi’an, China, 26–28 July 2013; pp. 5560–5565. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Zheng, Q.; Gao, L.Q.; Gao, Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknow dynamics. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Wenchao, X.; Yi, H. The active disturbance rejection control for a class of MIMO block lower-triangular system. In Proceedings of the IEEE 30th Chinese Control Conference (CCC 2011), Yantai, China, 22–24 July 2011; pp. 6362–6367. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Tgi | 0.08 s | Tri | 10 s |
| Tti | 0.3 s | Tpi | 20 s |
| Kri | 0.5 | Kpi | 120 |
| Ri | 2.4 |
| Controller | Parameters | Value | Parameters | Value |
|---|---|---|---|---|
| Traditional proportion integration differentiation (PID) | Kp | 5 | Ki | 0.5 |
| Kd | 1 | |||
| fractional-order proportion integration differentiation (FOPID) | Kp | 37 | Ki | 7 |
| Kd | 8 | λ | 0.08 | |
| µ | 0.055 | |||
| linear active disturbance rejection control (LADRC) | Kp | 49 | Kd | 14 |
| ω0 | 1.1 | ωc | 7 | |
| b | 290 | d | 0 |
| Controller | Disturbance Duration (s) | Maximum Amplitude (Hz) | Overshoot (Hz) | MSE (× 10−4) |
|---|---|---|---|---|
| Traditional PID | 24 | 0.035 | 0 | 6.19 |
| FOPID | 26 | 0.041 | 0.005 | 5.30 |
| LADRC | 17 | 0.033 | 0.003 | 3.85 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Twi | 1 s | Kd | 4 |
| Ki | 5 | ||
| Kp | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; He, J.; Luo, Z.; Shan, H.; Li, C.; Mei, R.; Yan, Q.; Wang, X.; Wei, L. Load Frequency Control of Pumped Storage Power Station Based on LADRC. Processes 2020, 8, 380. https://doi.org/10.3390/pr8040380
Liu K, He J, Luo Z, Shan H, Li C, Mei R, Yan Q, Wang X, Wei L. Load Frequency Control of Pumped Storage Power Station Based on LADRC. Processes. 2020; 8(4):380. https://doi.org/10.3390/pr8040380
Chicago/Turabian StyleLiu, Kezhen, Jing He, Zhao Luo, Hua Shan, Chenglong Li, Rui Mei, Quanchun Yan, Xiaojian Wang, and Li Wei. 2020. "Load Frequency Control of Pumped Storage Power Station Based on LADRC" Processes 8, no. 4: 380. https://doi.org/10.3390/pr8040380
APA StyleLiu, K., He, J., Luo, Z., Shan, H., Li, C., Mei, R., Yan, Q., Wang, X., & Wei, L. (2020). Load Frequency Control of Pumped Storage Power Station Based on LADRC. Processes, 8(4), 380. https://doi.org/10.3390/pr8040380