Distributed Optimal Frequency Regulation for Multiple Distributed Power Generations with an Event-Triggered Communication Mechanism

 ,
,
Abstract
:1. Introduction
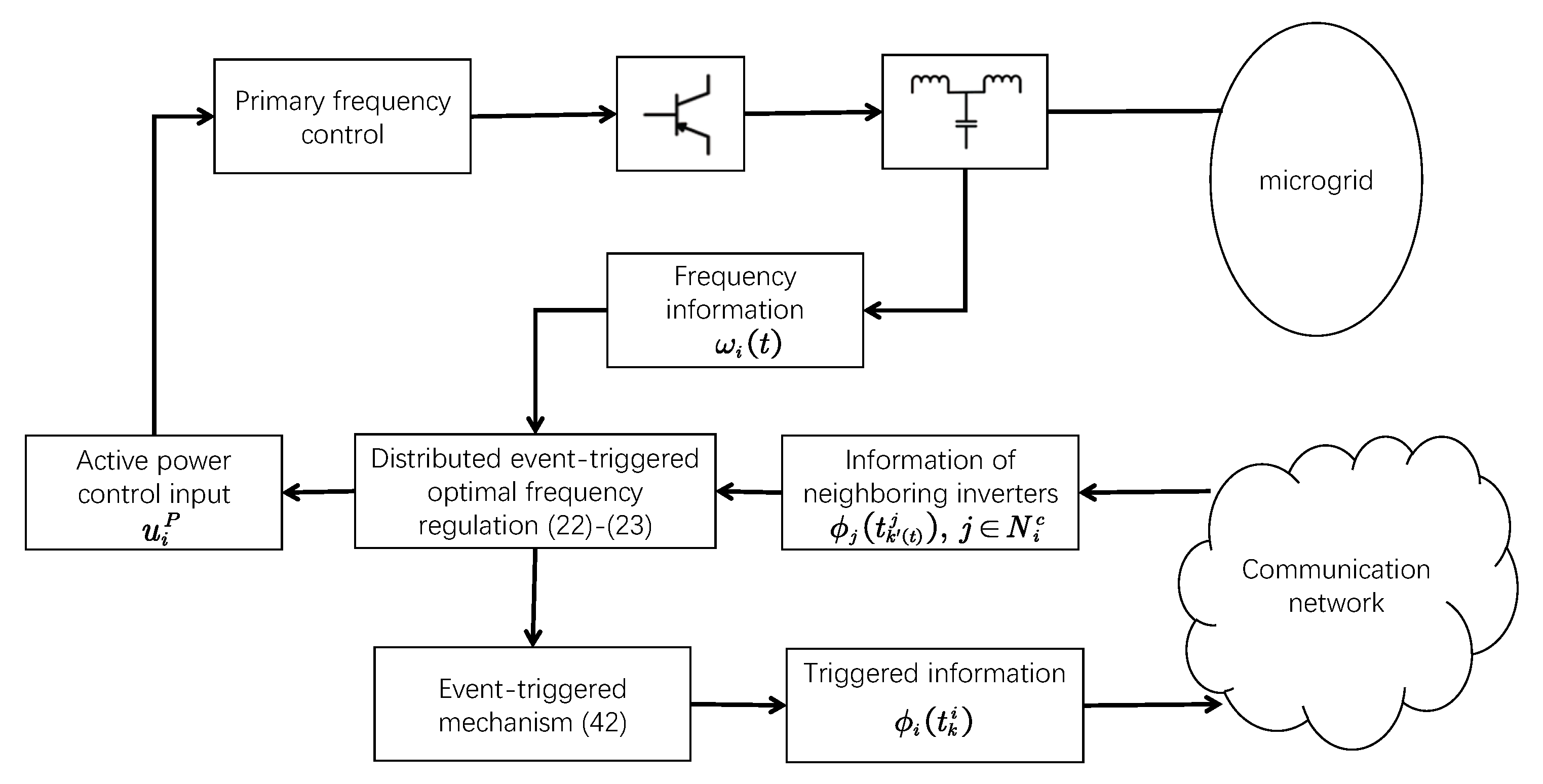
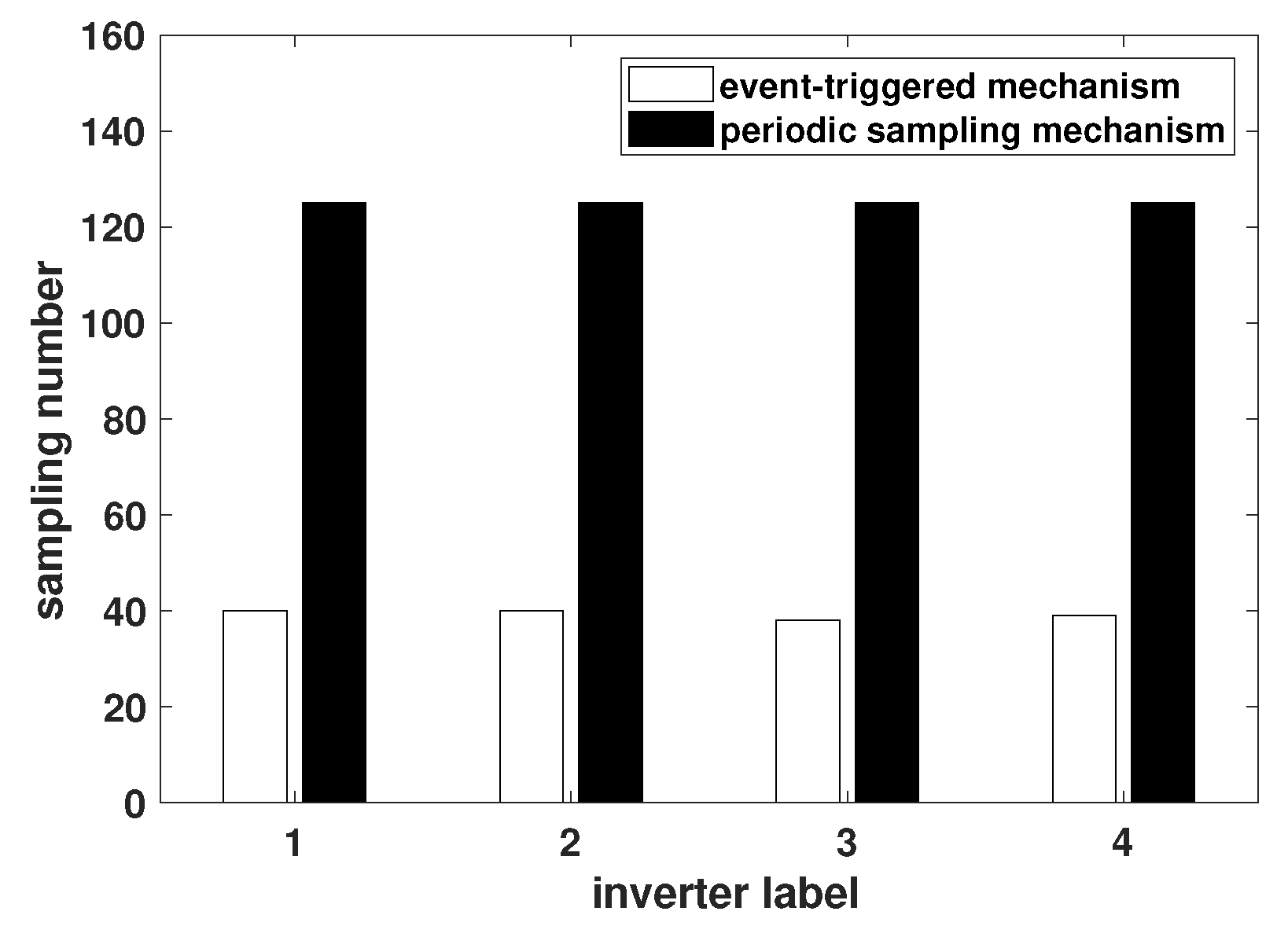
- The regulation strategy based on an event-triggered mechanism is proposed to restore the frequency and retain the economic efficiency in this paper, where the information of each power generation inverter is only transmitted when the constructed event-triggered condition is satisfied.
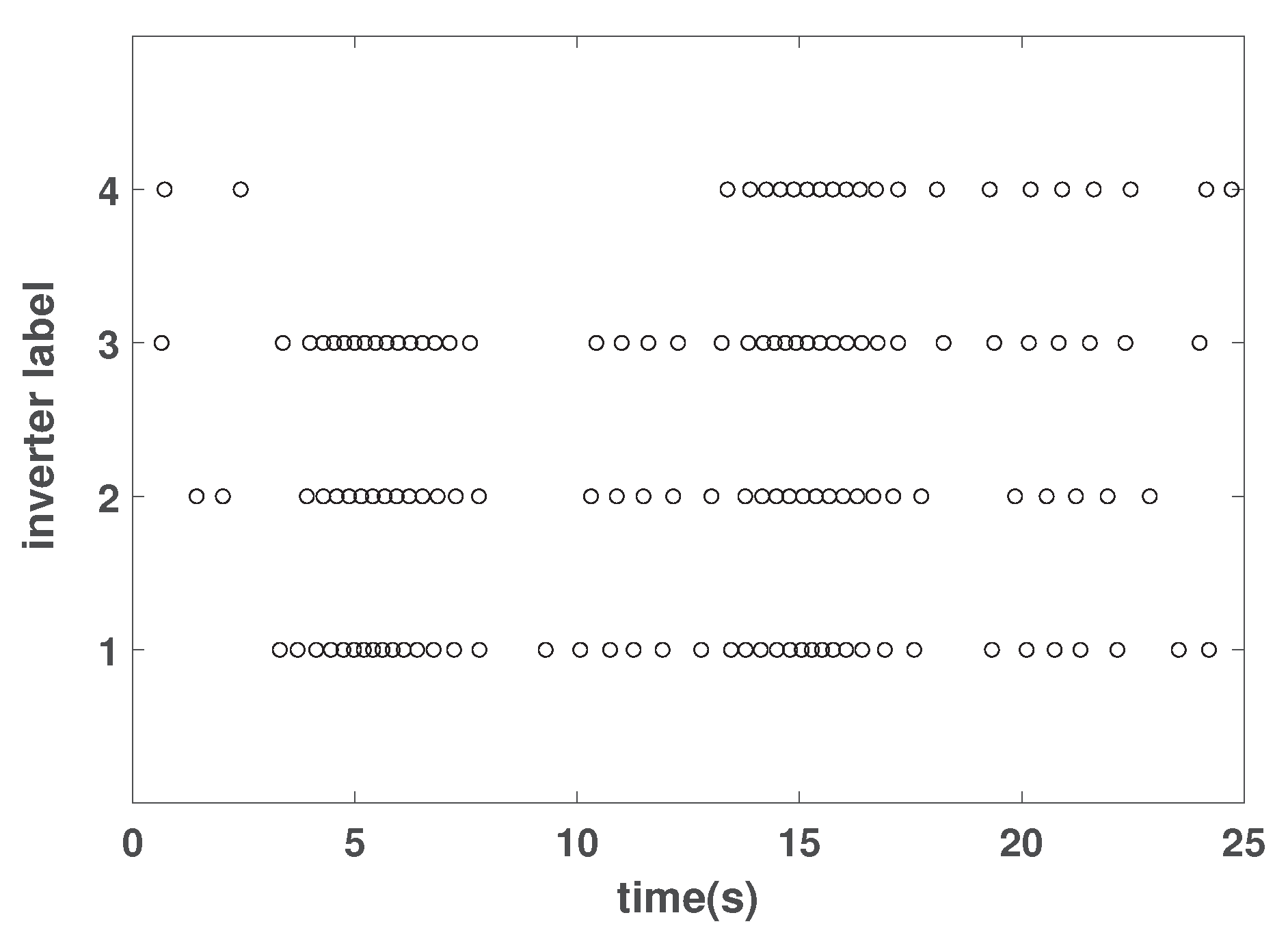
- Zeno behavior is avoided through theoretical analysis, which means that the information will not be transmitted an infinite number of times in any finite time period. This makes the proposed optimal frequency regulation algorithm reasonable and realistic for practical application.
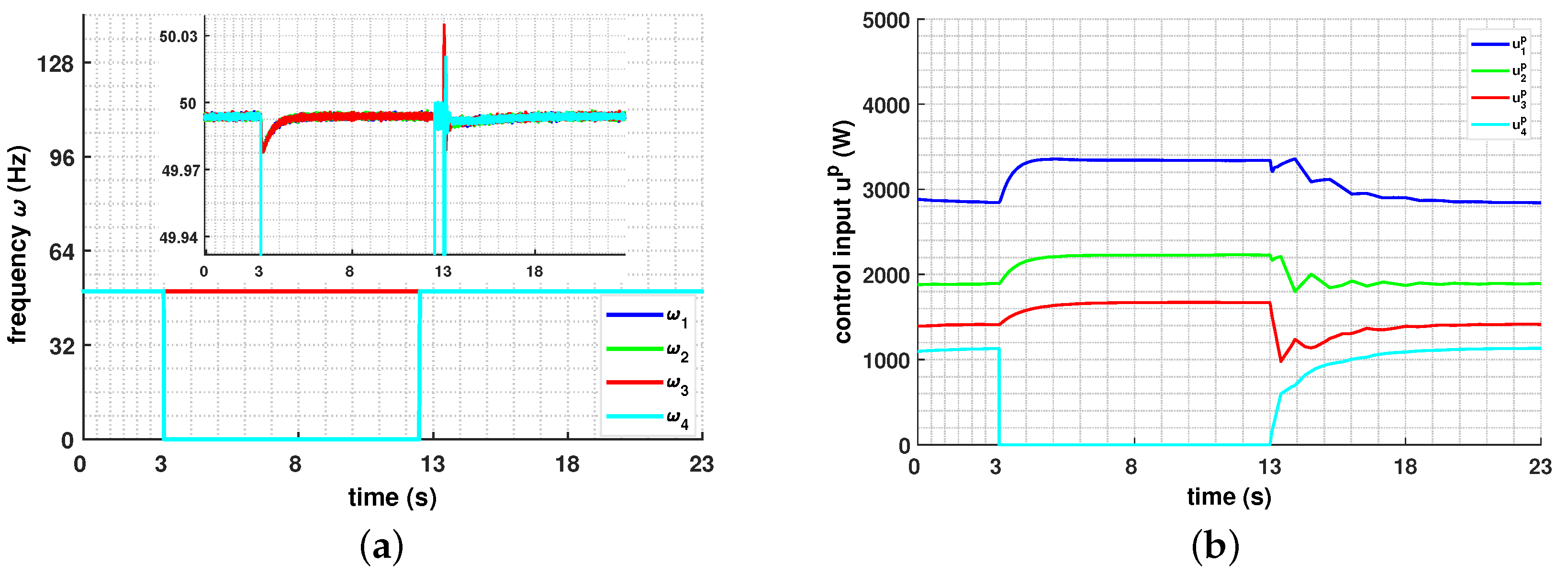
- The proposed event-triggered regulation in this paper is constructed based on the nonlinear droop-controlled inverter model which can describe the frequency dynamics more accurately.
2. Problem Formulation
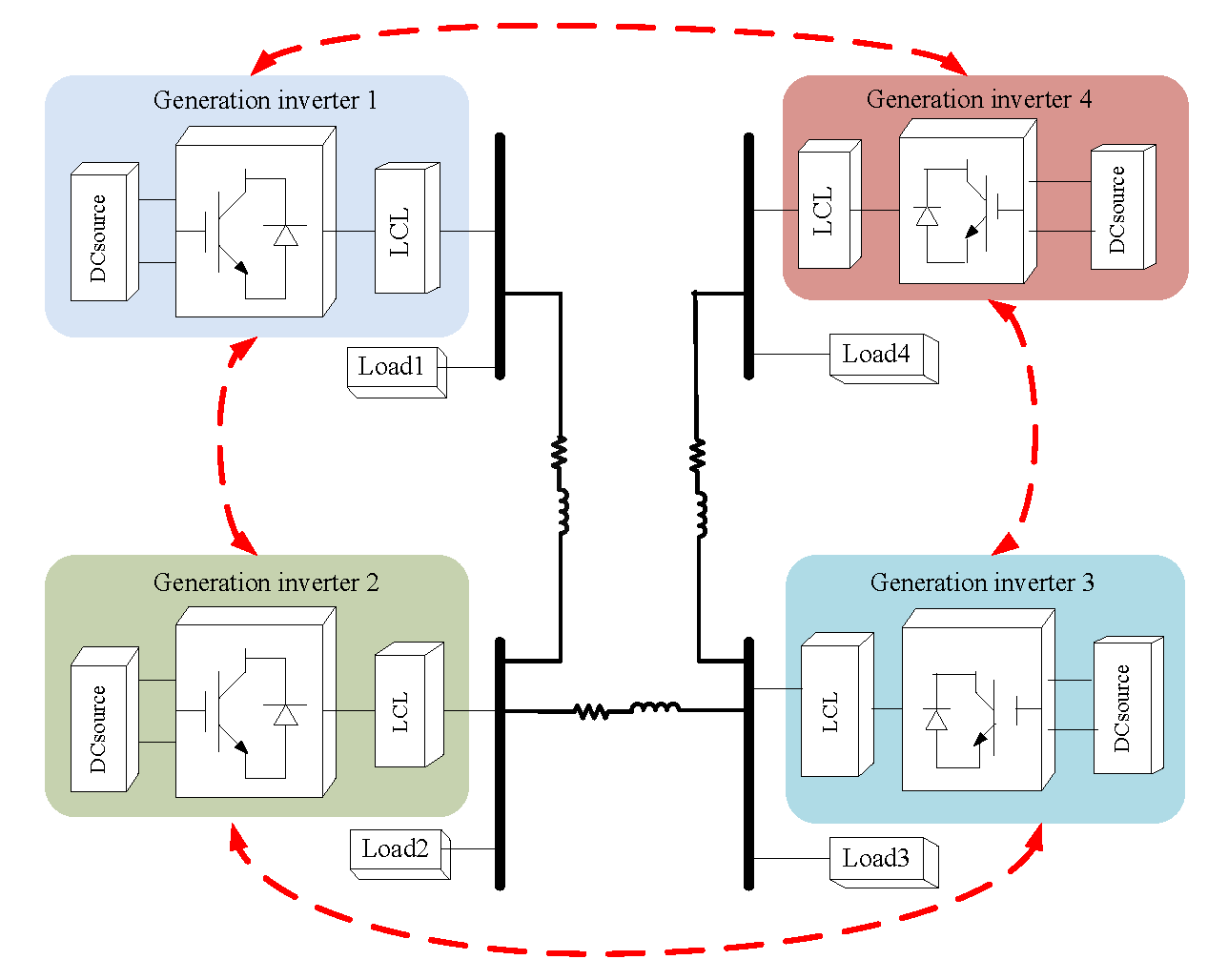
2.1. Microgrid Model
2.2. Communication Network
2.3. Control Purpose
3. Main Results
3.1. Distributed Event-Triggered Optimal Frequency Regulation
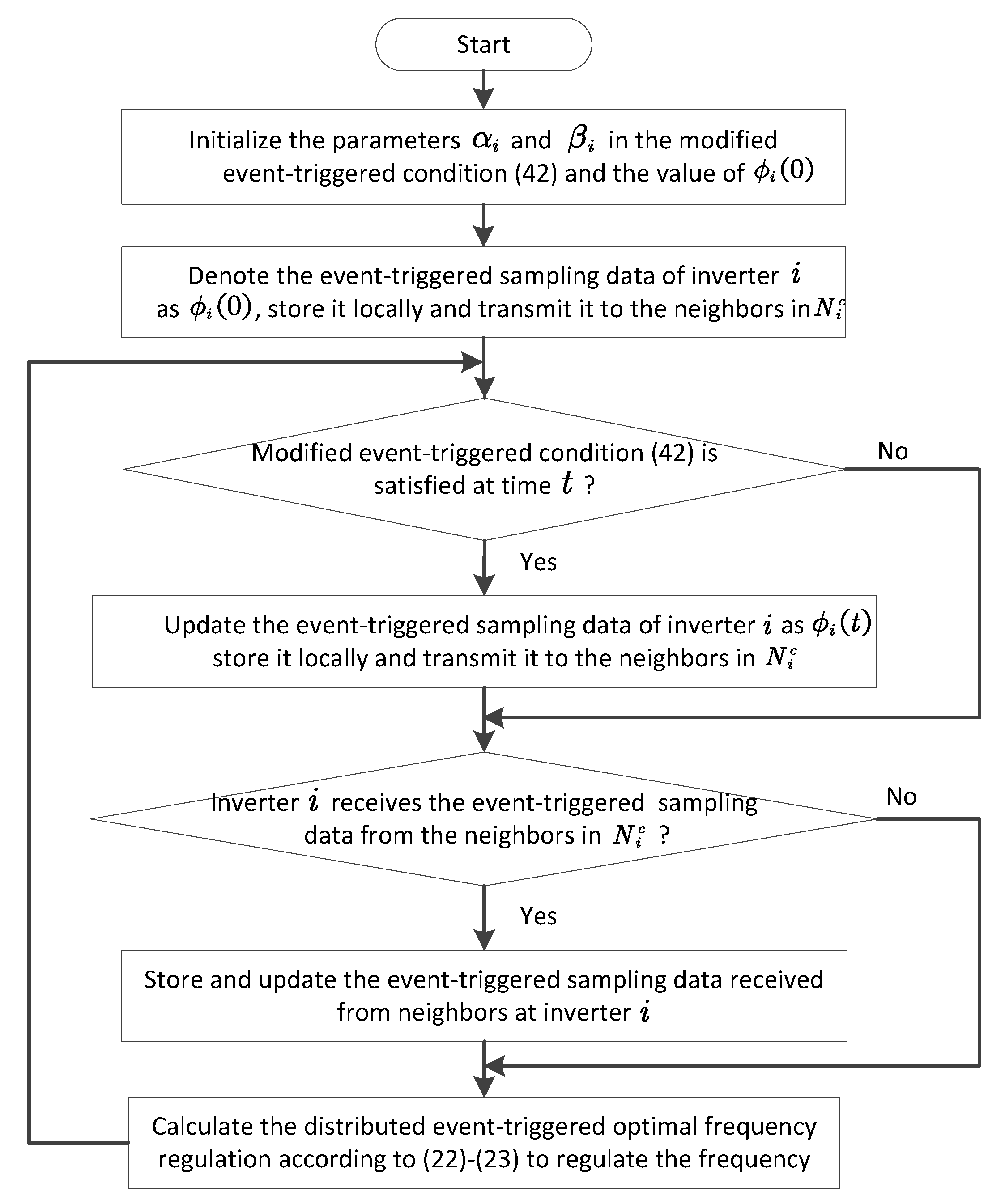
3.2. Distributed Event-Triggered Mechanism Based on Response Data
3.3. Modified Distributed Event-Triggered Mechanism Based on Response Data
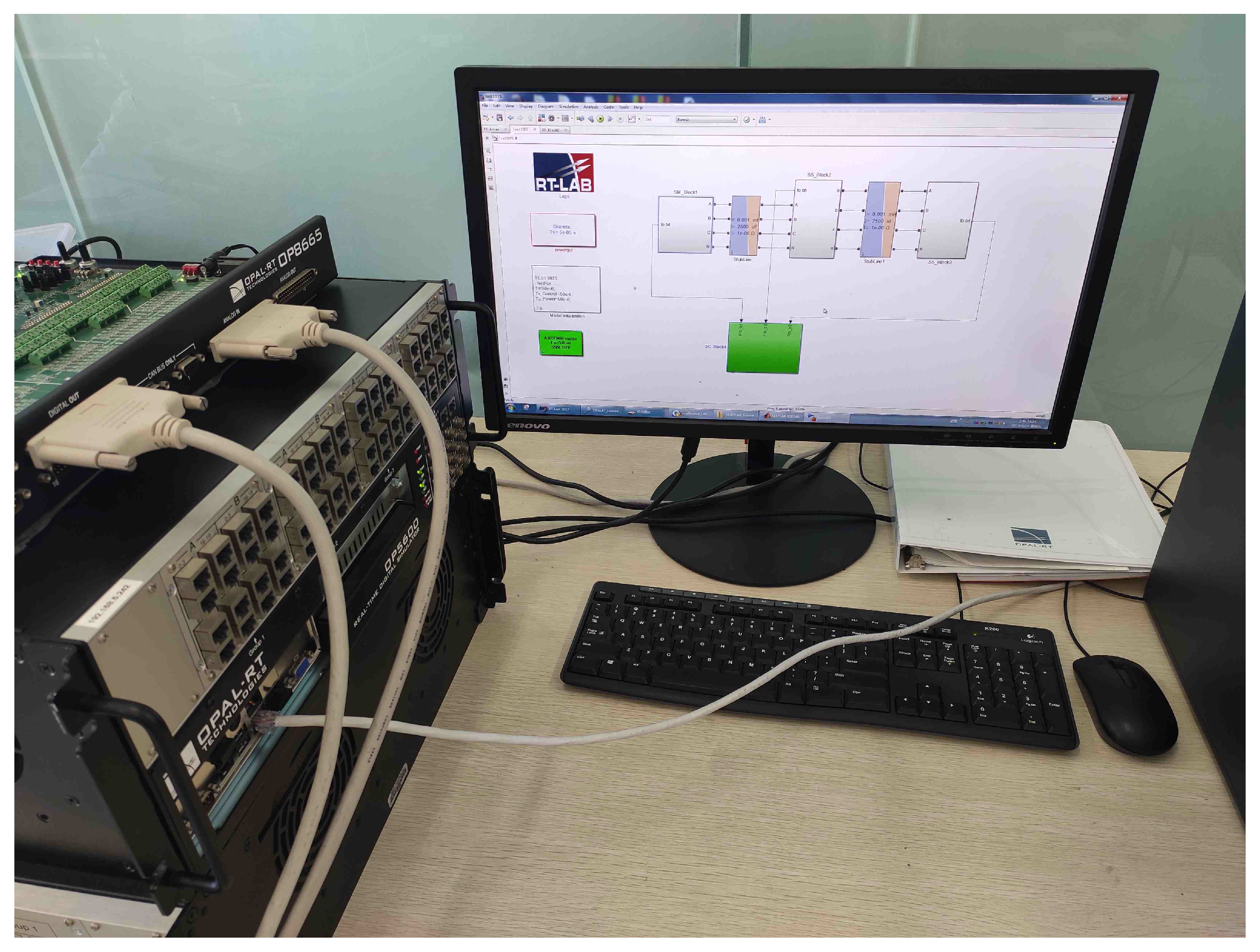
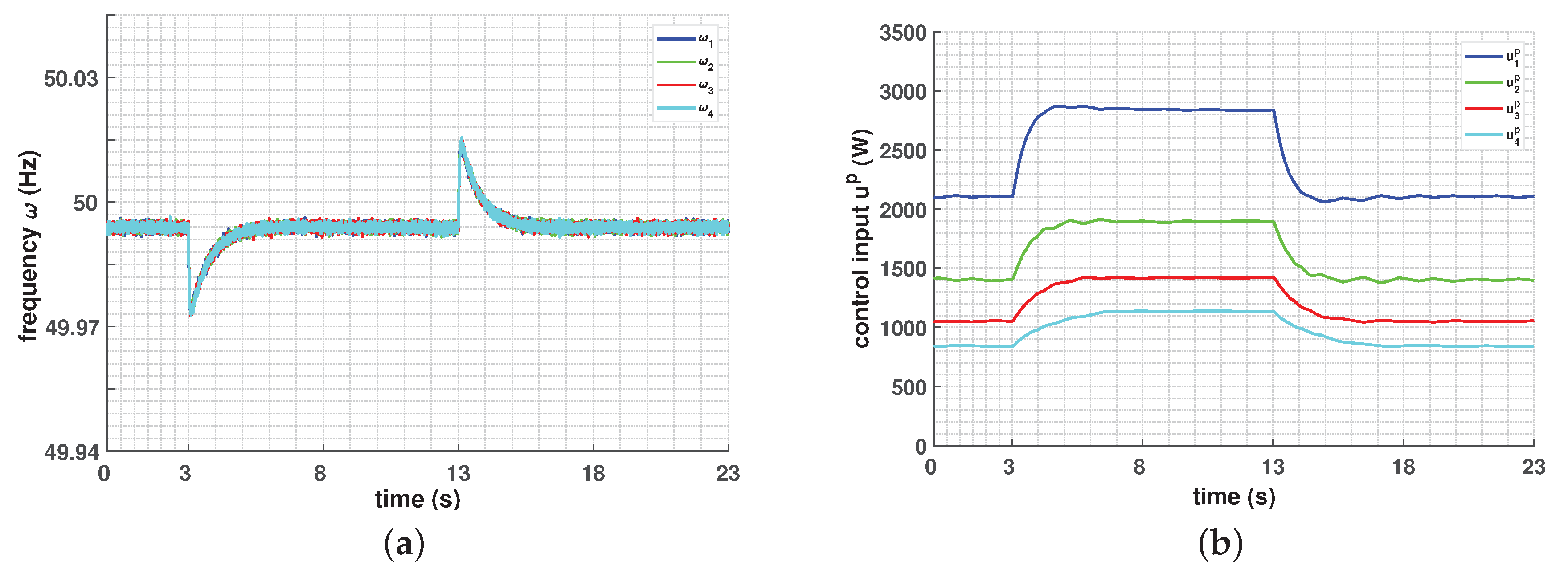
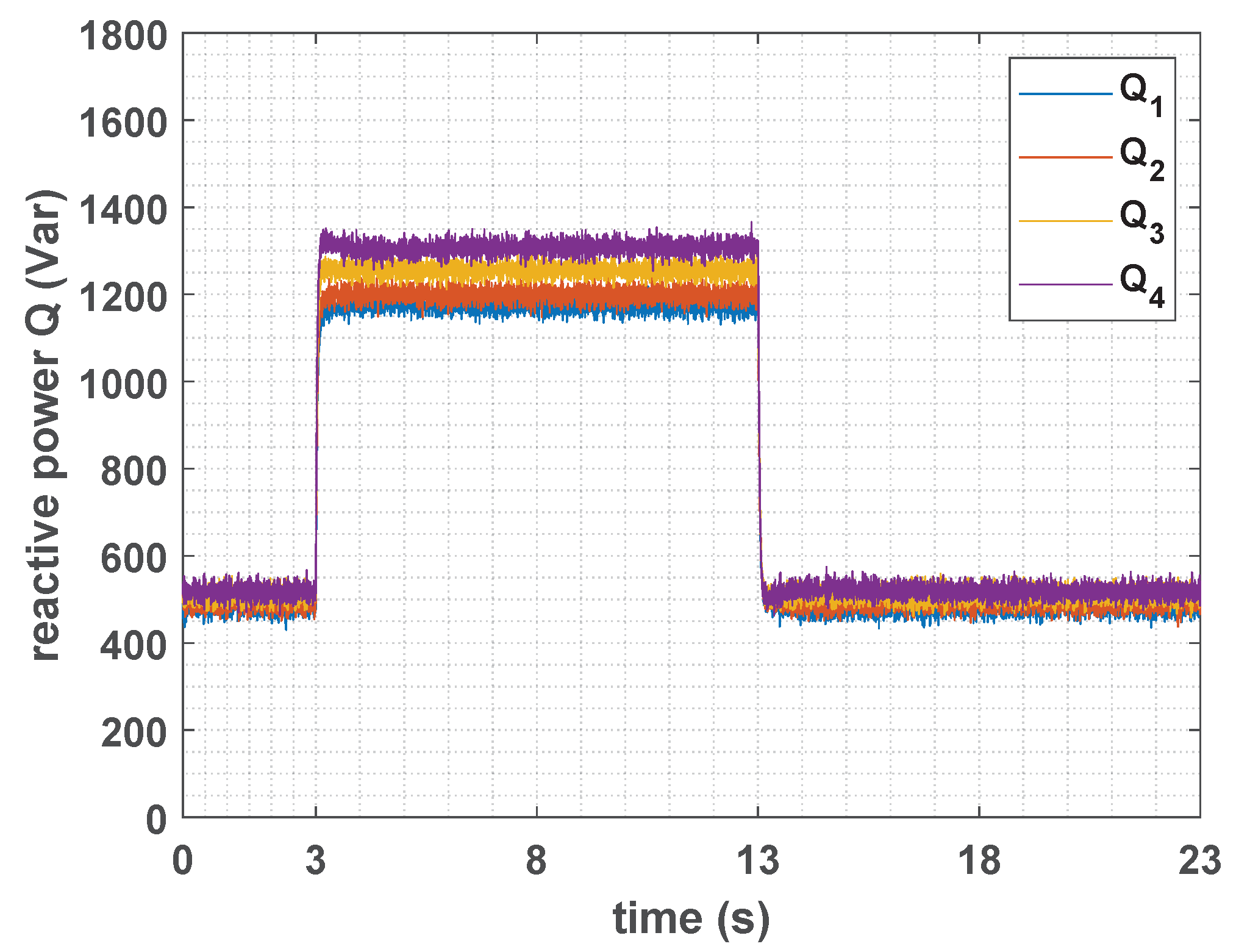
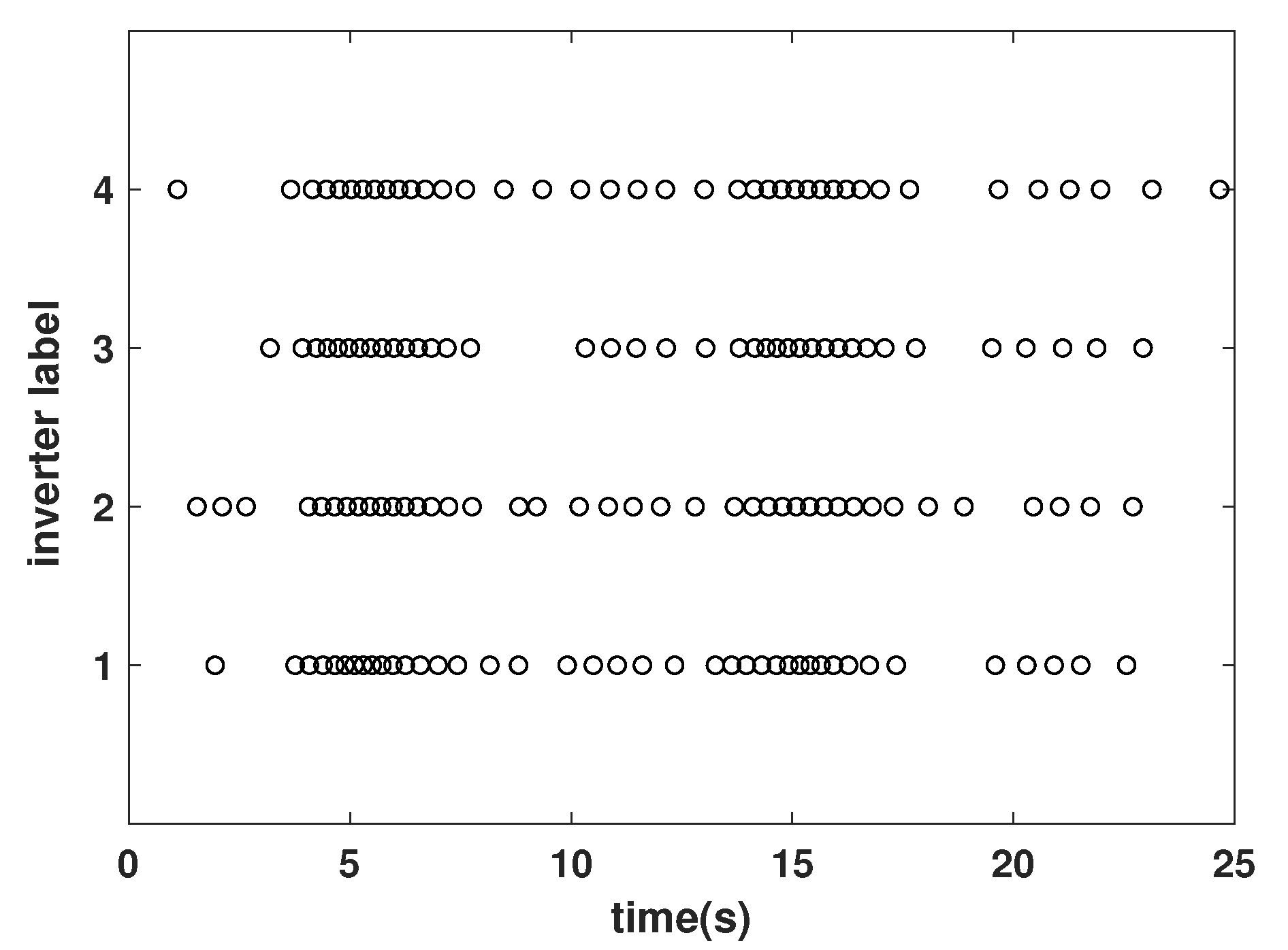
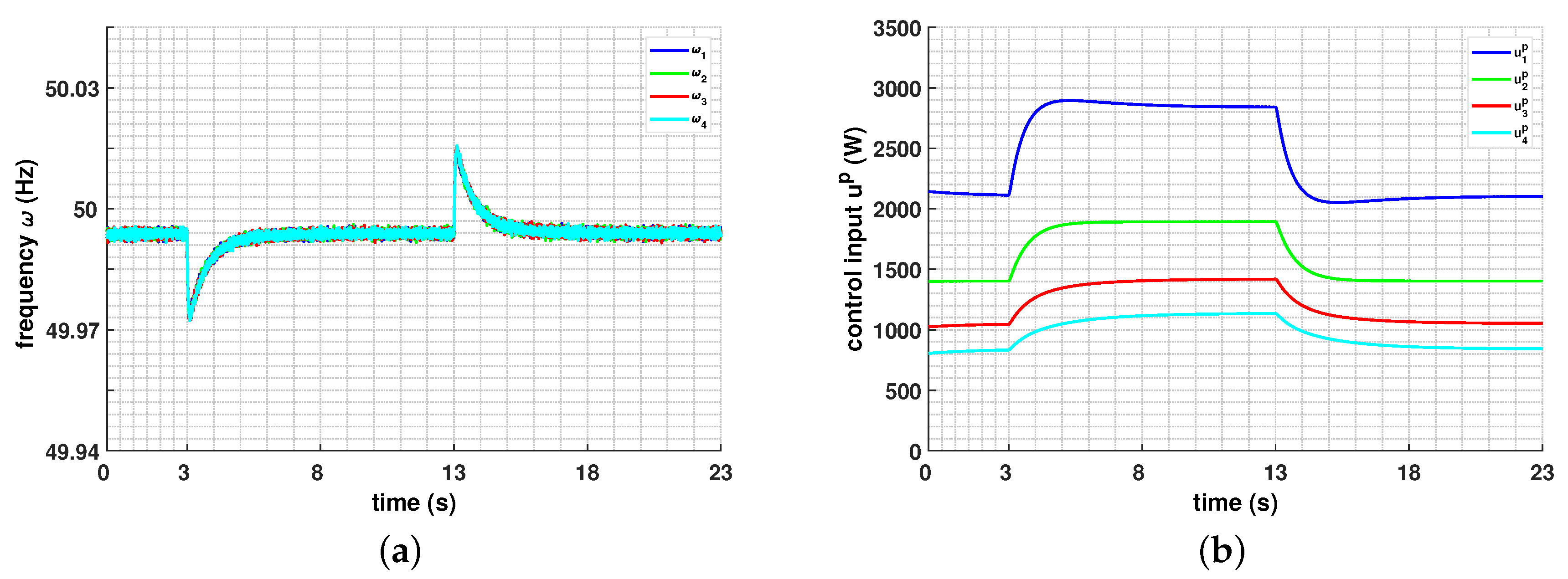
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Atawi, I.E.; Kassem, A.M.; Zaid, S.A. Modeling, Management, and Control of an Autonomous Wind/Fuel Cell Micro-Grid System. Processes 2019, 7, 85. [Google Scholar] [CrossRef] [Green Version]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the art in research on microgrids: A review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Krishna, A.; Schiffer, J.; Raisch, J. A consensus-based control law for accurate frequency restoration and power sharing in microgrids in the presence of clock drifts. In Proceedings of the IEEE European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 2575–2580. [Google Scholar]
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for MicroGrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef] [Green Version]
- Tan, K.T.; Peng, X.Y.; So, P.L.; Chu, Y.C.; Chen, M.Z.Q. Centralized Control for Parallel Operation of Distributed Generation Inverters in Microgrids. IEEE Trans. Smart Grid 2012, 3, 1977–1987. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Wang, X.; Liu, P.X. Impact of Communication Delays on Secondary Frequency Control in an Islanded Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Xingli, Z.; Ning, W. Multi-agent consensus algorithm-based optimal power dispatch for islanded multi-microgrids. Processes 2019, 7, 679. [Google Scholar] [CrossRef] [Green Version]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids—A novel approach. IEEE Trans. Power Electron. 2013, 29, 1018–1031. [Google Scholar] [CrossRef] [Green Version]
- Simpson-Porco, J.W.; Dorfler, F.; Bullo, F. Synchronization and power sharing for droop-controlled inverters in islanded microgrids. Automatica 2013, 49, 2603–2611. [Google Scholar] [CrossRef] [Green Version]
- Bouattour, H.; Simpson-Porco, J.W.; Dörfler, F.; Bullo, F. Further results on distributed secondary control in microgrids. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 1514–1519. [Google Scholar]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Pilloni, A.; Pisano, A.; Usai, E. Robust finite-time frequency and voltage restoration of inverter-based microgrids via sliding-mode cooperative control. IEEE Trans. Ind. Electron. 2017, 65, 907–917. [Google Scholar] [CrossRef]
- Cai, H.; Hu, G.; Lewis, F.L.; Davoudi, A. A Distributed Feedforward Approach to Cooperative Control of AC Microgrids. IEEE Transa. Power Syst. 2016, 31, 4057–4067. [Google Scholar] [CrossRef]
- Trip, S.; Bürger, M.; De Persis, C. An internal model approach to frequency regulation in inverter-based microgrids with time-varying voltages. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 223–228. [Google Scholar]
- Lai, J.; Lu, X.; Yu, X.; Monti, A.; Zhou, H. Distributed voltage regulation for cyber-physical microgrids with coupling delays and slow switching topologies. IEEE Trans. Syst. Man Cybern. Syst. 2019. [Google Scholar] [CrossRef]
- Lai, J.; Lu, X.; Yu, X. Stochastic Distributed Frequency and Load Sharing Control for Microgrids with Communication Delays. IEEE Syst. J. 2019, 13, 4269–4280. [Google Scholar] [CrossRef]
- Yue, D.; Tian, E.; Han, Q.L. A Delay System Method for Designing Event-Triggered Controllers of Networked Control Systems. IEEE Trans. Autom. Control 2013, 58, 475–481. [Google Scholar] [CrossRef]
- Wang, X.; Lemmon, M. Event-Triggering in Distributed Networked Control Systems. IEEE Trans. Autom. Control 2011, 56, 586–601. [Google Scholar] [CrossRef] [Green Version]
- Tahir, M.; Mazumder, S.K. Self-Triggered Communication Enabled Control of Distributed Generation in Microgrids. IEEE Trans. Ind. Inf. 2015, 11, 441–449. [Google Scholar] [CrossRef]
- Fan, Y.; Hu, G.; Egerstedt, M. Distributed Reactive Power Sharing Control for Microgrids with Event-Triggered Communication. IEEE Trans. Control Syst. Technol. 2017, 25, 118–128. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, C.; Song, C. Sampling-based self-triggered coordination control for multi-agent systems with application to distributed generators. Int. J. Syst. Sci. 2018, 49, 3048–3062. [Google Scholar] [CrossRef]
- Dorfler, F.; Bullo, F. Synchronization and transient stability in power networks and nonuniform Kuramoto oscillators. SIAM J. Control Optim. 2012, 50, 1616–1642. [Google Scholar] [CrossRef] [Green Version]
- Schiffer, J.; Ortega, R.; Astolfi, A.; Raisch, J.; Sezi, T. Conditions for stability of droop-controlled inverter-based microgrids. Automatica 2014, 50, 2457–2469. [Google Scholar] [CrossRef] [Green Version]
- Ding, L.; Han, Q.L.; Zhang, X.M. Distributed secondary control for active power sharing and frequency regulation in islanded microgrids using an event-triggered communication mechanism. IEEE Trans. Ind. Inform. 2018, 15, 3910–3922. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inverter 1 | Inverter 2 | Inverter 3 | Inverter 4 | |
|---|---|---|---|---|
| ETM | 40 | 40 | 38 | 39 |
| PSM | 125 | 125 | 125 | 125 |
| rate | 32.0% | 32.0% | 30.4% | 31.2% |
| Inverter 1 | Inverter 2 | Inverter 3 | Inverter 4 | |
|---|---|---|---|---|
| ETM | 41 | 37 | 40 | 22 |
| PSM | 125 | 125 | 125 | 75 |
| rate | 32.8% | 29.6% | 32.0% | 29.3% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Sun, H.; Zhao, B.; Yi, J.; Weng, S.; Chen, J.; Dou, C. Distributed Optimal Frequency Regulation for Multiple Distributed Power Generations with an Event-Triggered Communication Mechanism. Processes 2020, 8, 169. https://doi.org/10.3390/pr8020169
Xu S, Sun H, Zhao B, Yi J, Weng S, Chen J, Dou C. Distributed Optimal Frequency Regulation for Multiple Distributed Power Generations with an Event-Triggered Communication Mechanism. Processes. 2020; 8(2):169. https://doi.org/10.3390/pr8020169
Chicago/Turabian StyleXu, Shiyun, Huadong Sun, Bing Zhao, Jun Yi, Shengxuan Weng, Jianbo Chen, and Chunxia Dou. 2020. "Distributed Optimal Frequency Regulation for Multiple Distributed Power Generations with an Event-Triggered Communication Mechanism" Processes 8, no. 2: 169. https://doi.org/10.3390/pr8020169
APA StyleXu, S., Sun, H., Zhao, B., Yi, J., Weng, S., Chen, J., & Dou, C. (2020). Distributed Optimal Frequency Regulation for Multiple Distributed Power Generations with an Event-Triggered Communication Mechanism. Processes, 8(2), 169. https://doi.org/10.3390/pr8020169