Monitoring and Analysis of Wave Characteristics during Pipeline End Termination Installation


Abstract
1. Introduction
2. Materials and Methods
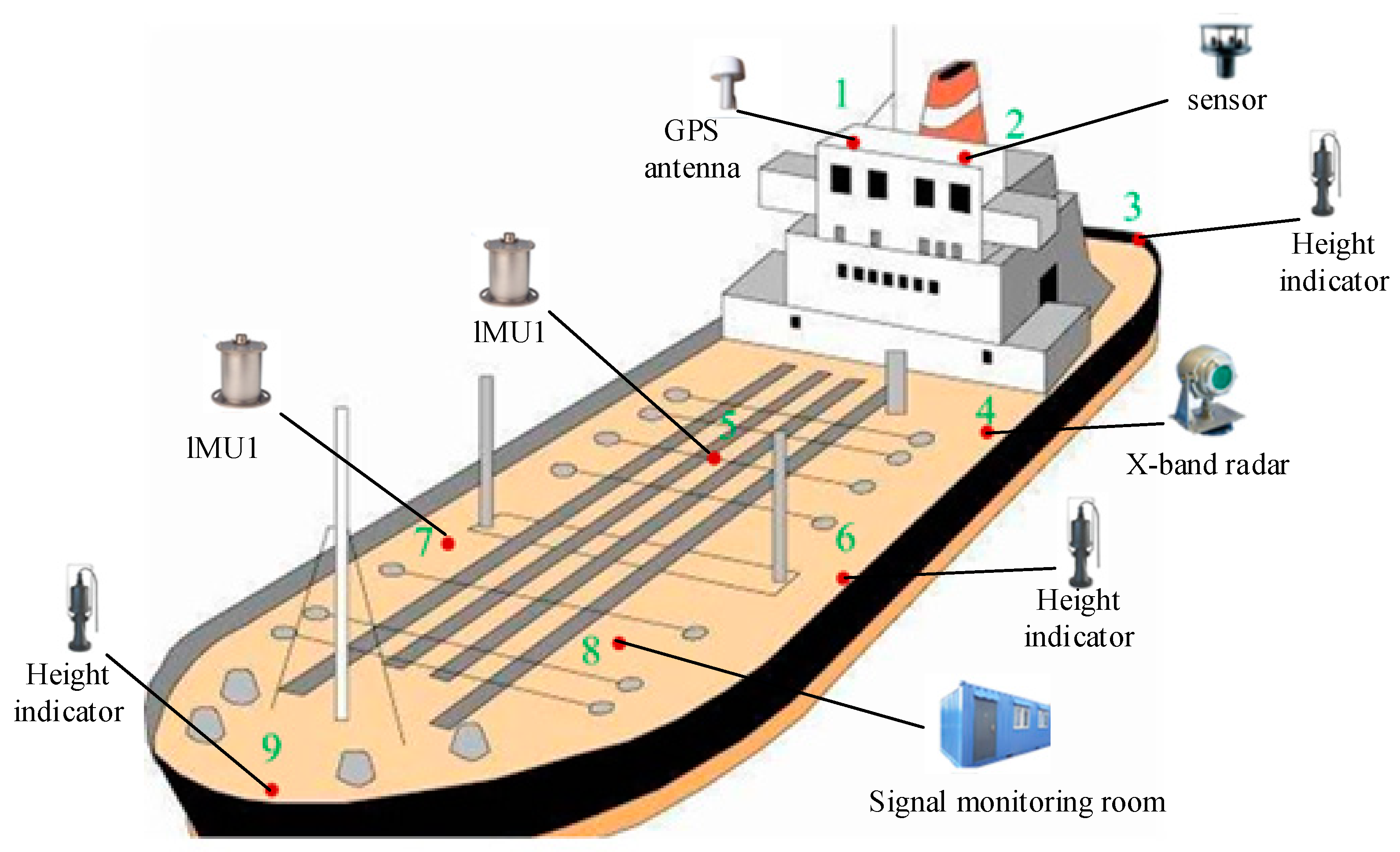
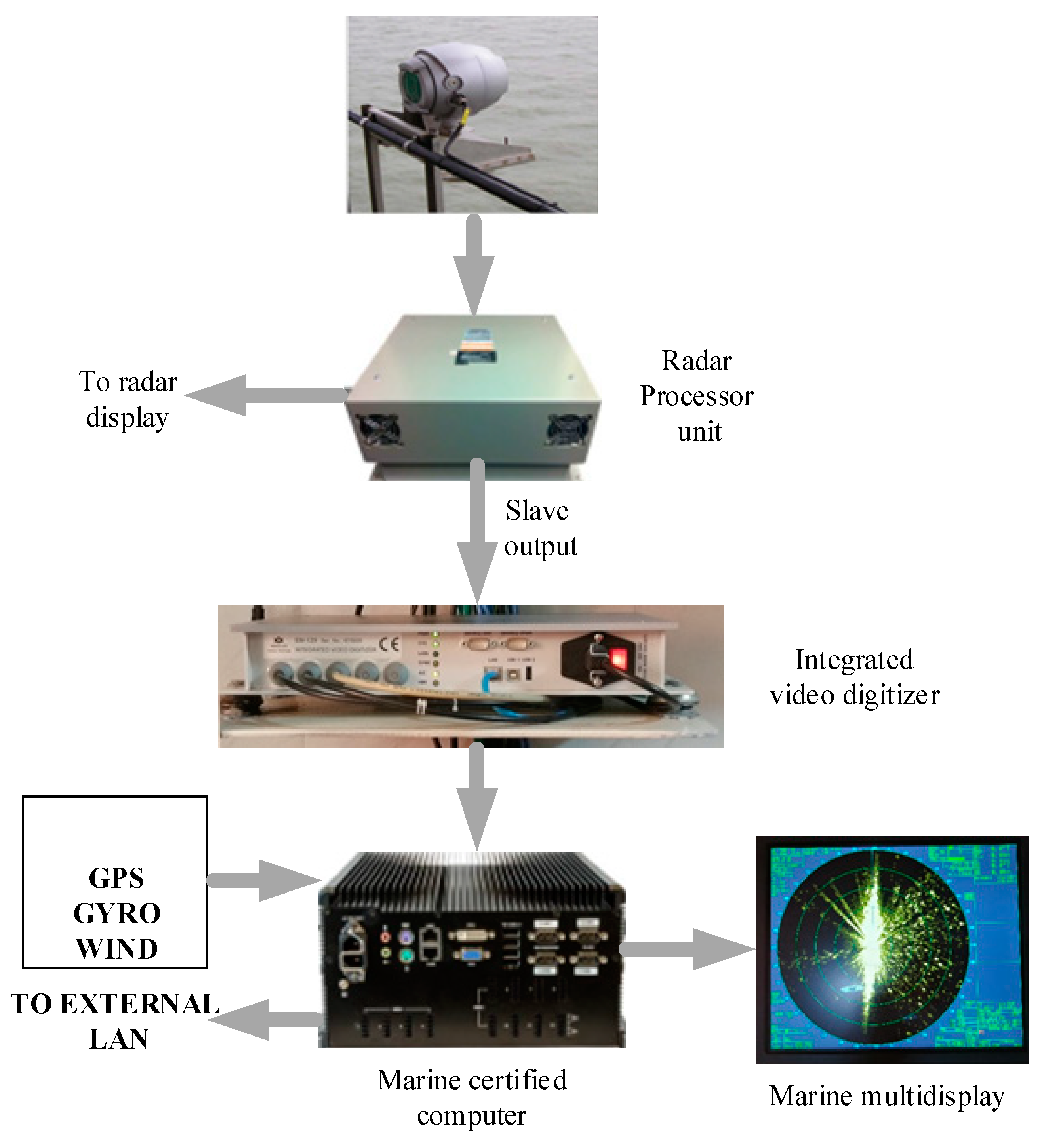
2.1. Operational Area and Monitoring System
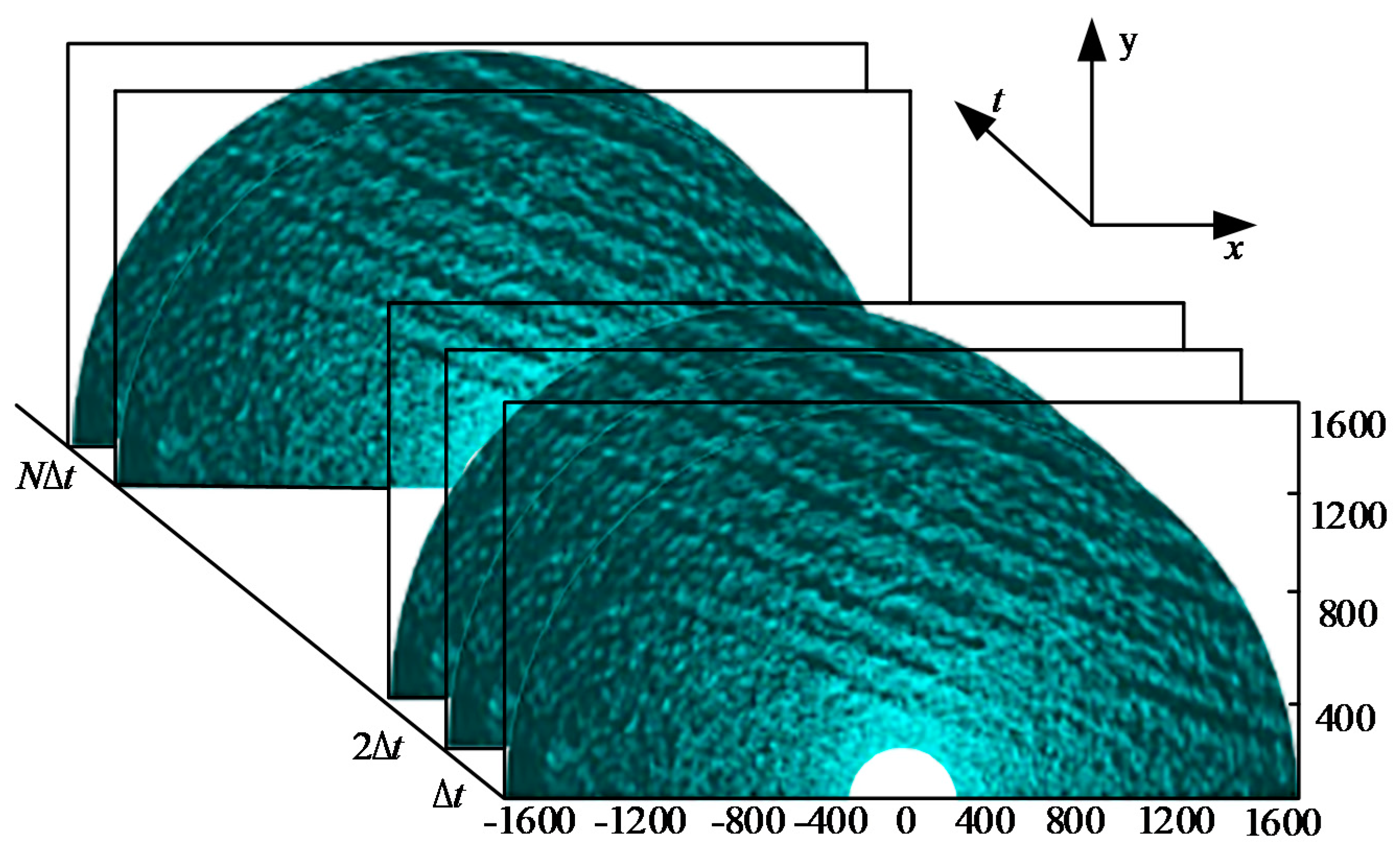
2.2. Extraction of Marine Information
3. Results of Wave Data Time Series Simulation and Spectral Estimation
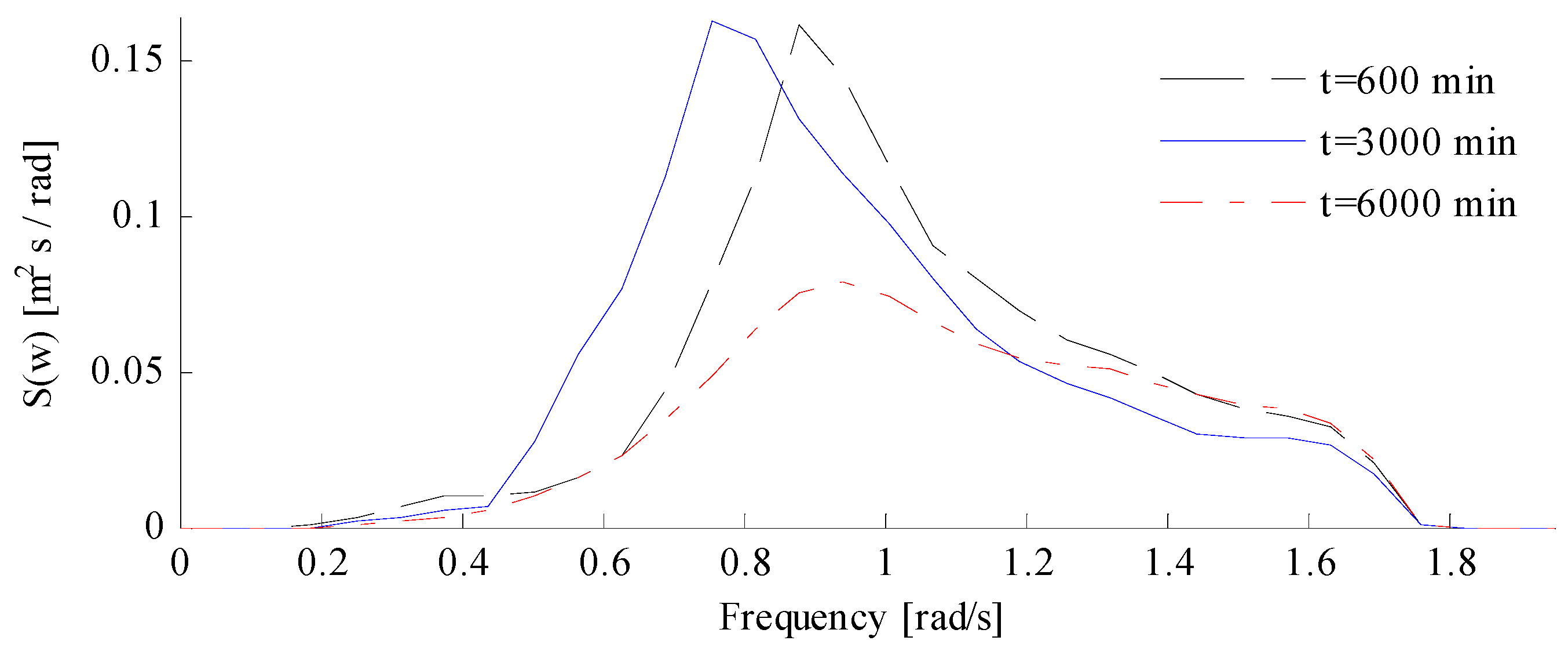
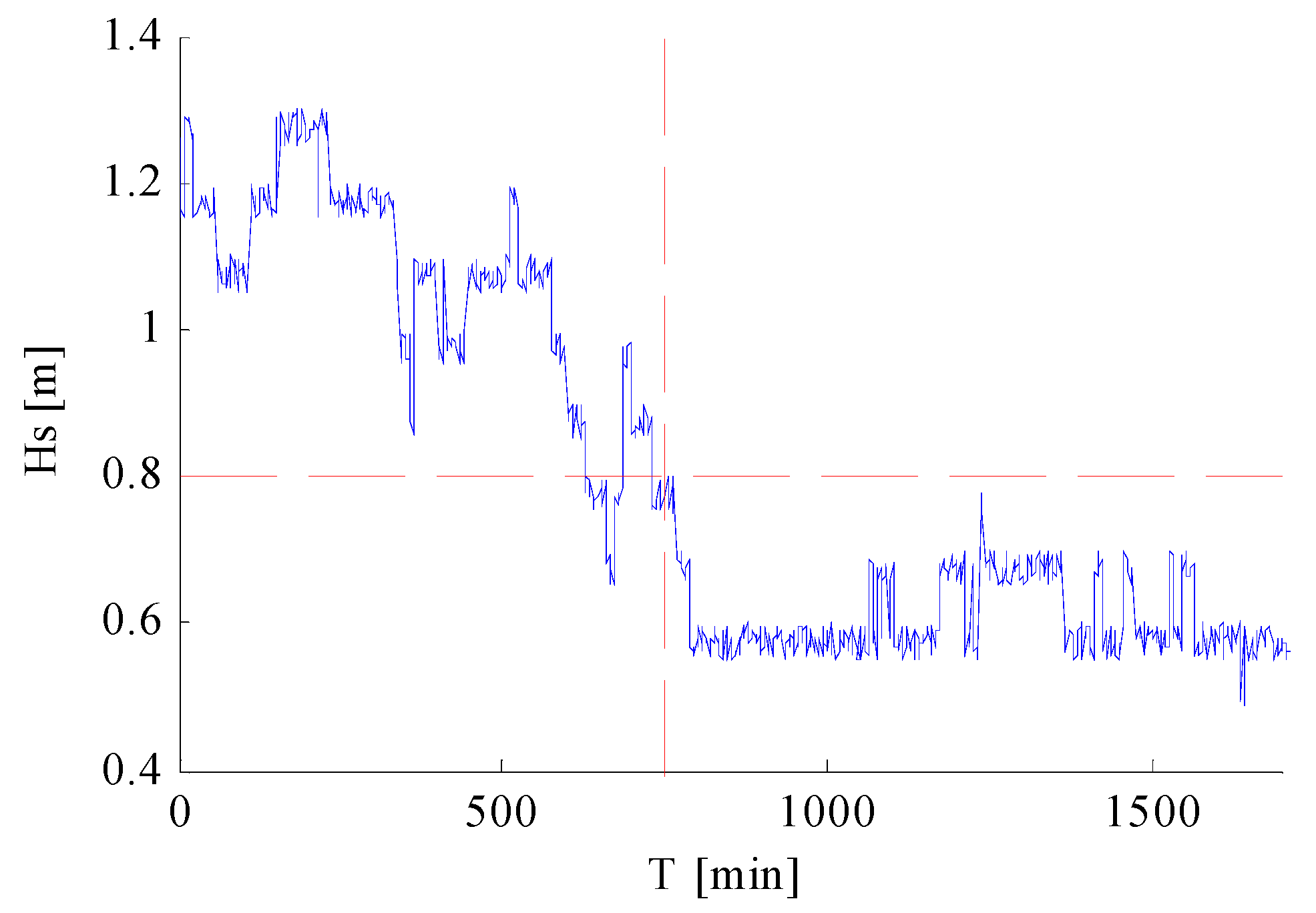
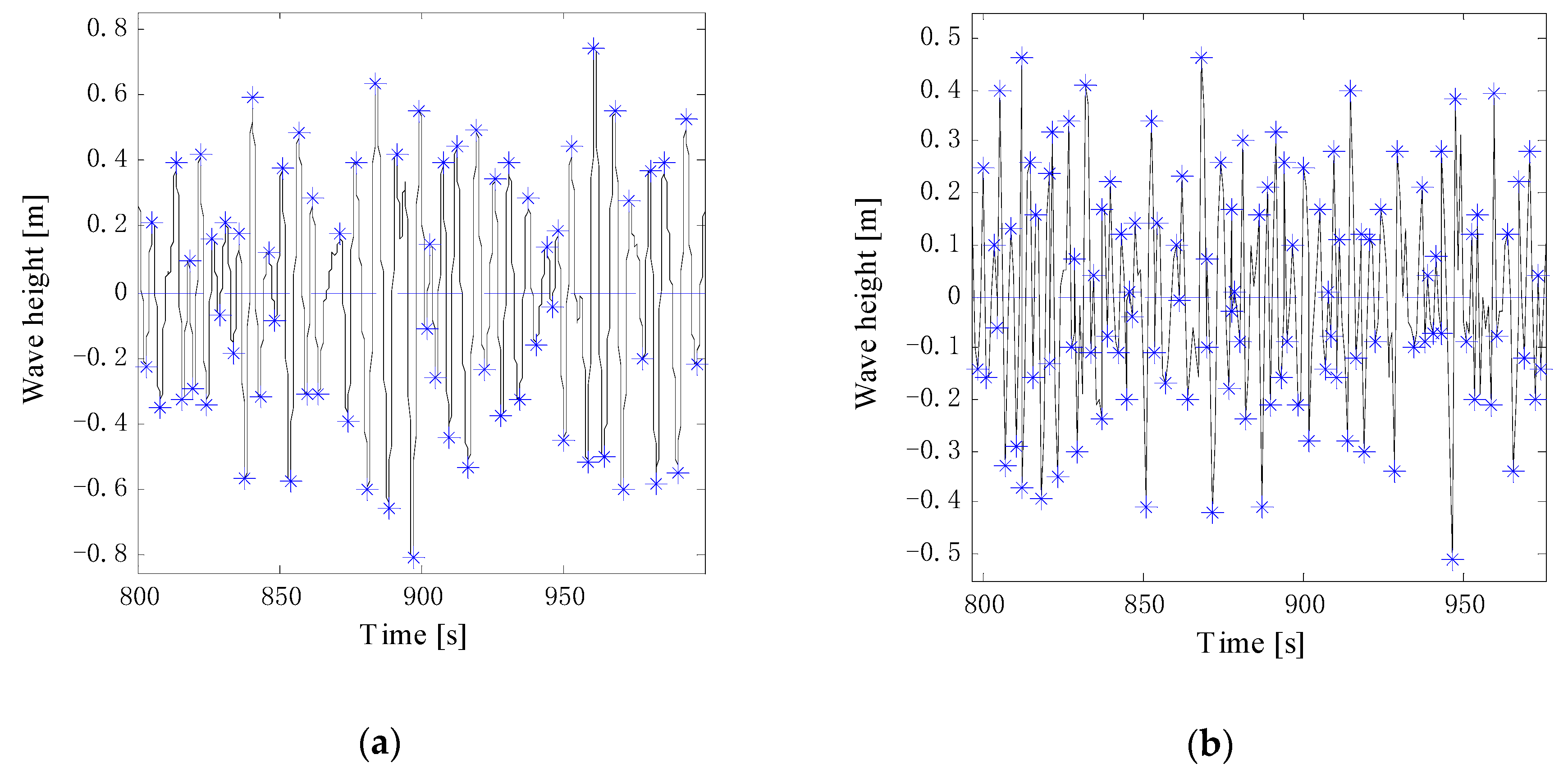
3.1. Wave Data Simulation
3.2. Similarity Analysis of Measured and Ocean Spectra
3.2.1. Regression of the Ocean Wave Spectrum
3.2.2. Theoretical Ocean Spectra
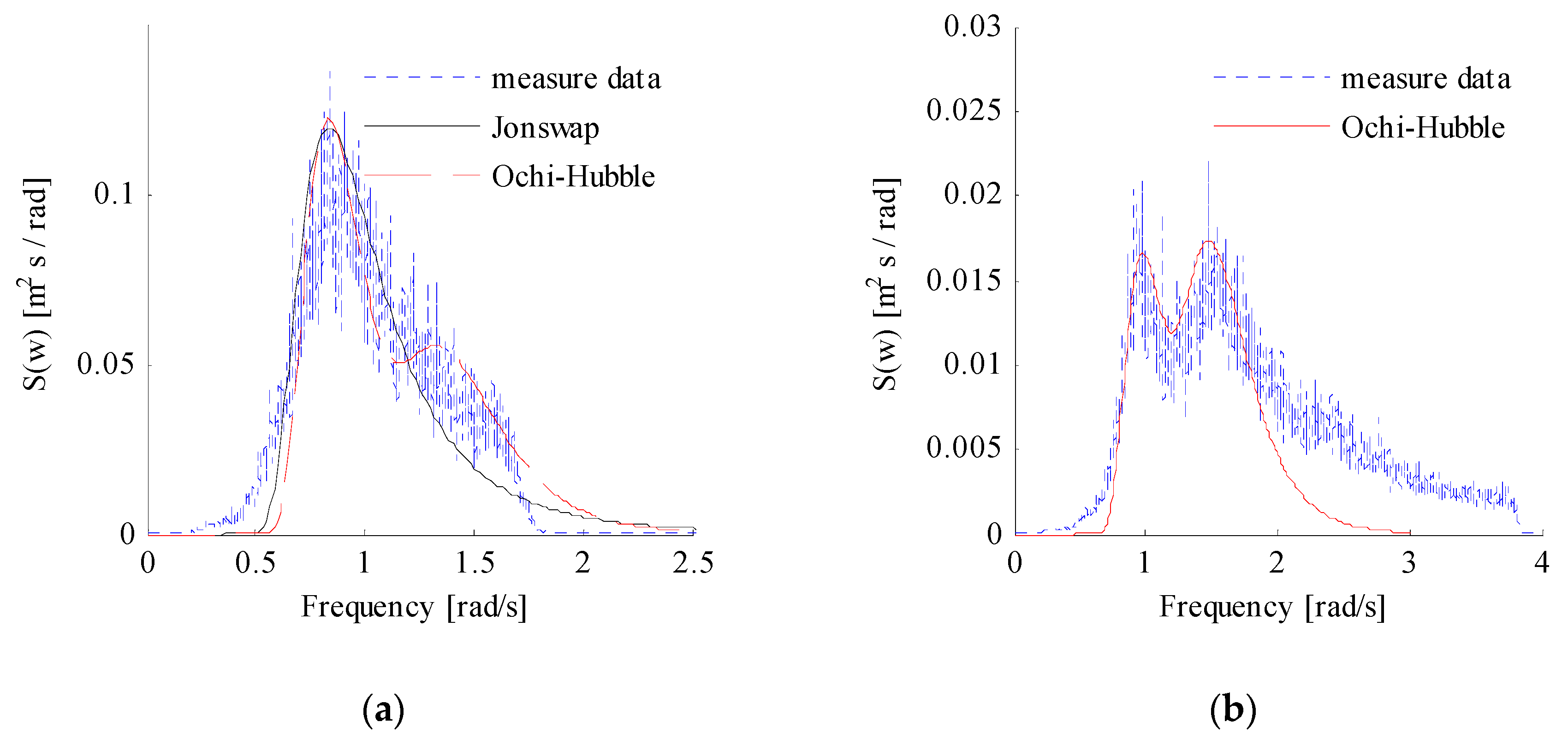
3.2.3. Comparison and Analysis of the Measured and Ocean Spectra
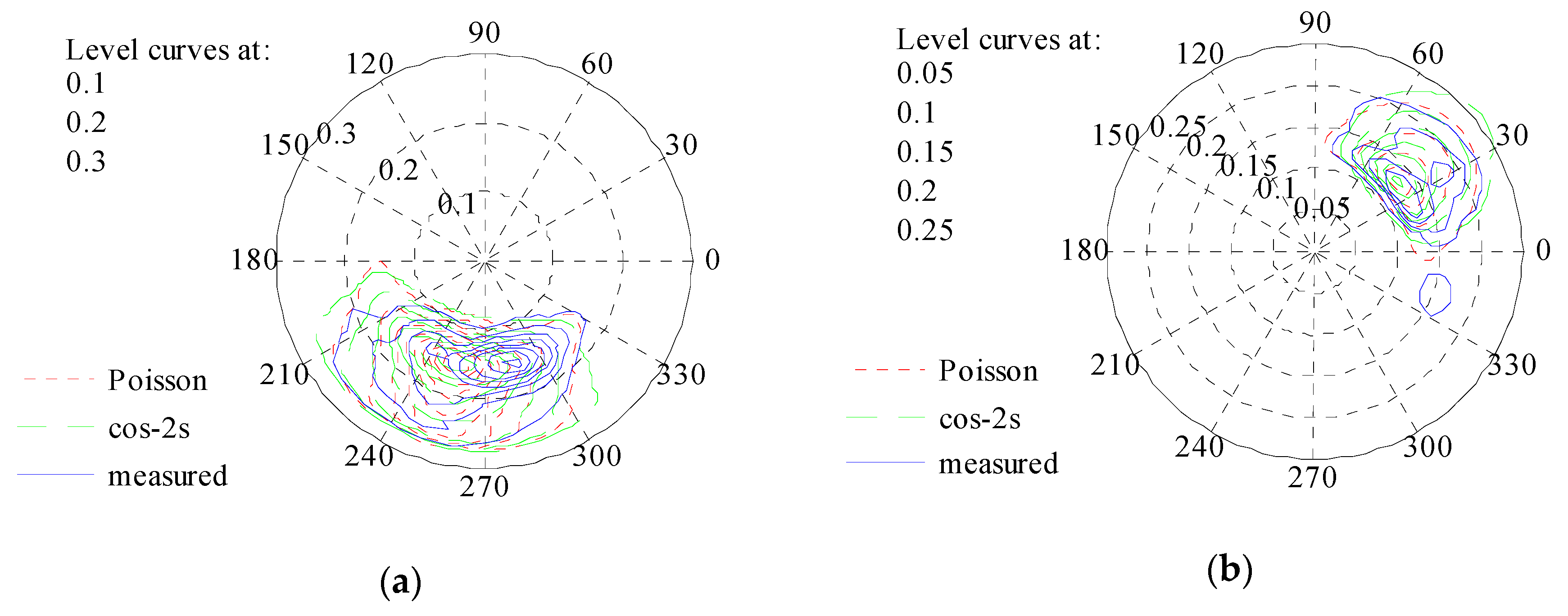
3.3. Direction Spectrum Regression and Spreading Function Analysis
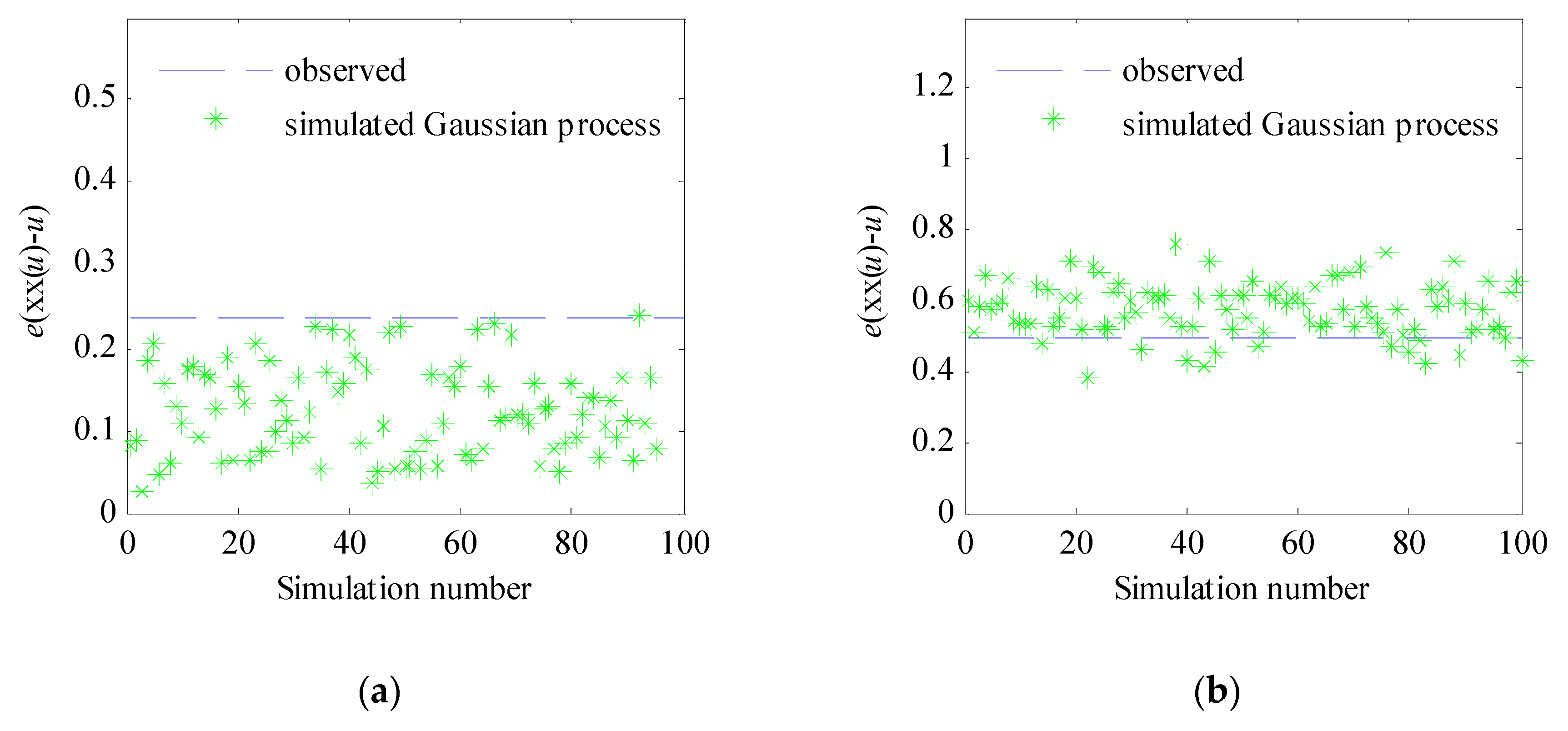
3.4. Gaussian Processing Test
4. Discussion
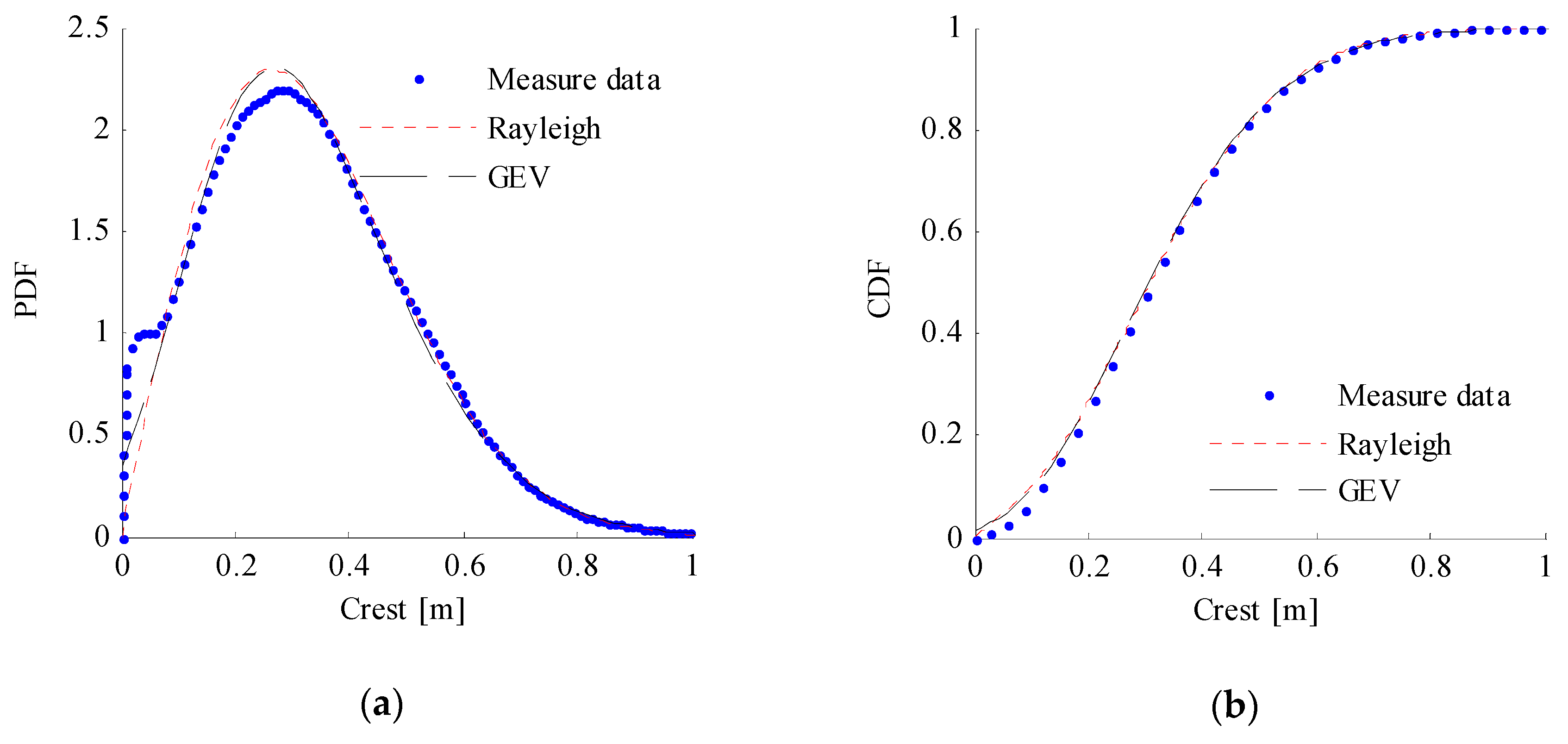
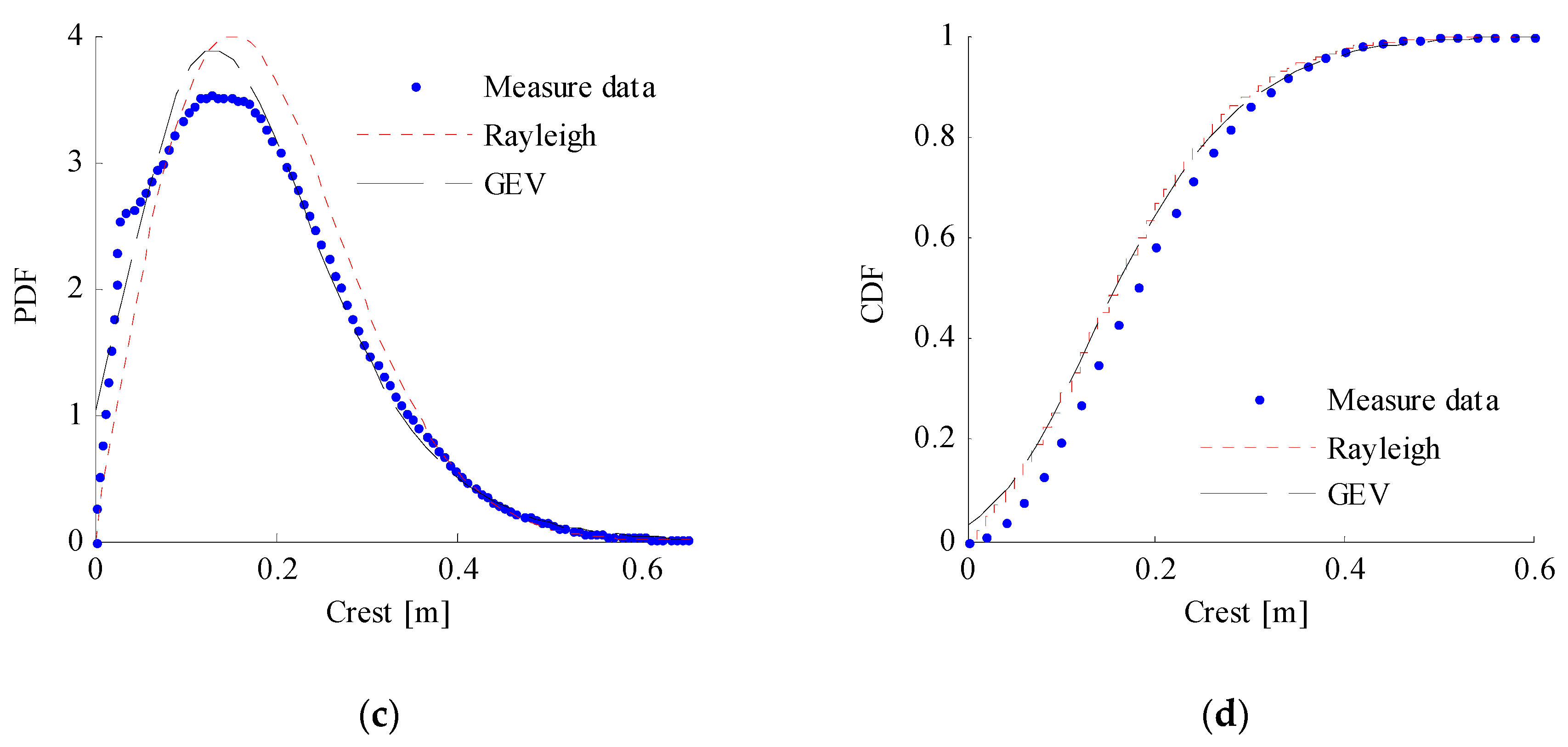
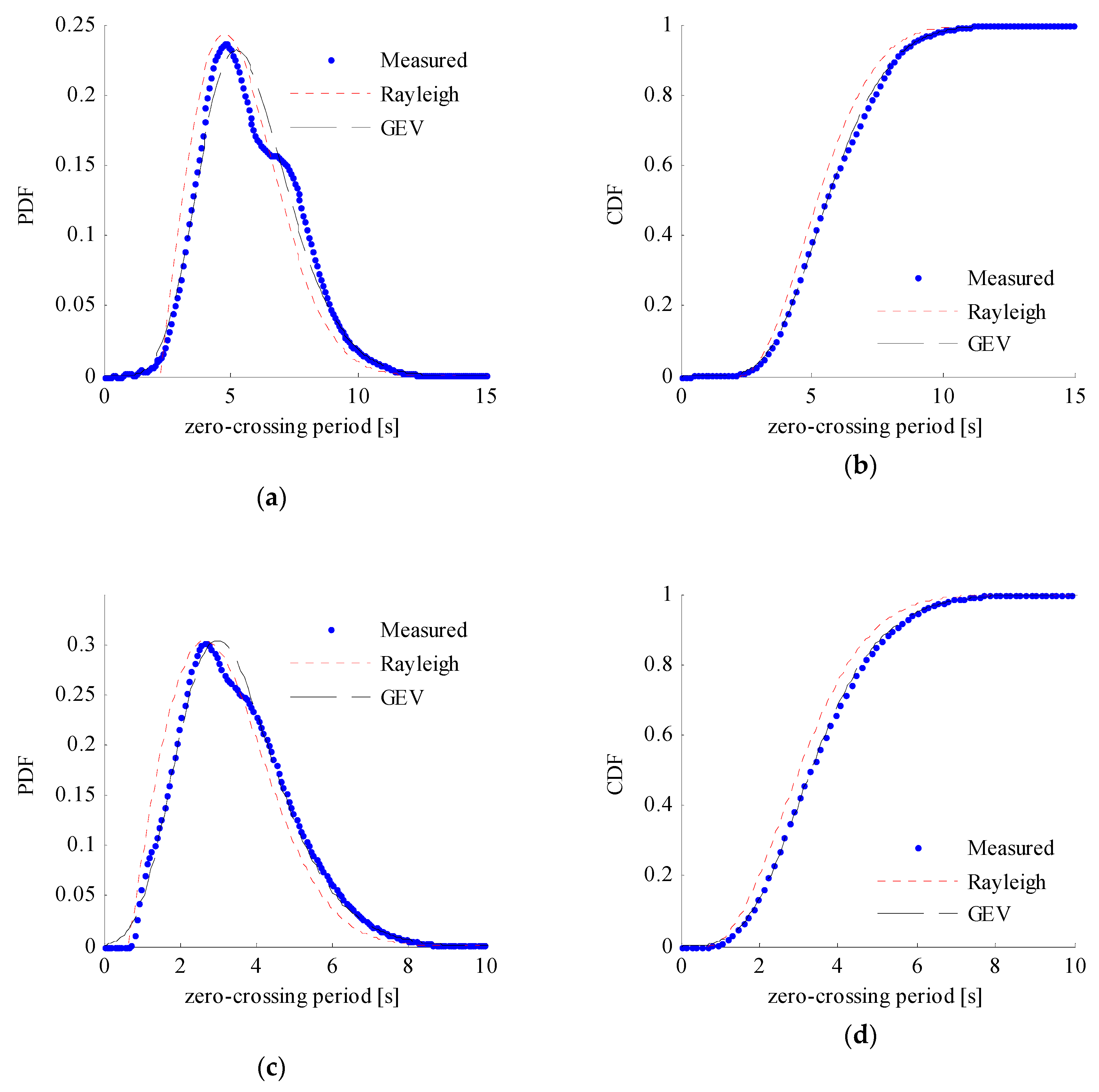
4.1. Theoretical Approximations of Wave Distribution
4.2. Marginal Distribution of Wave Characteristics
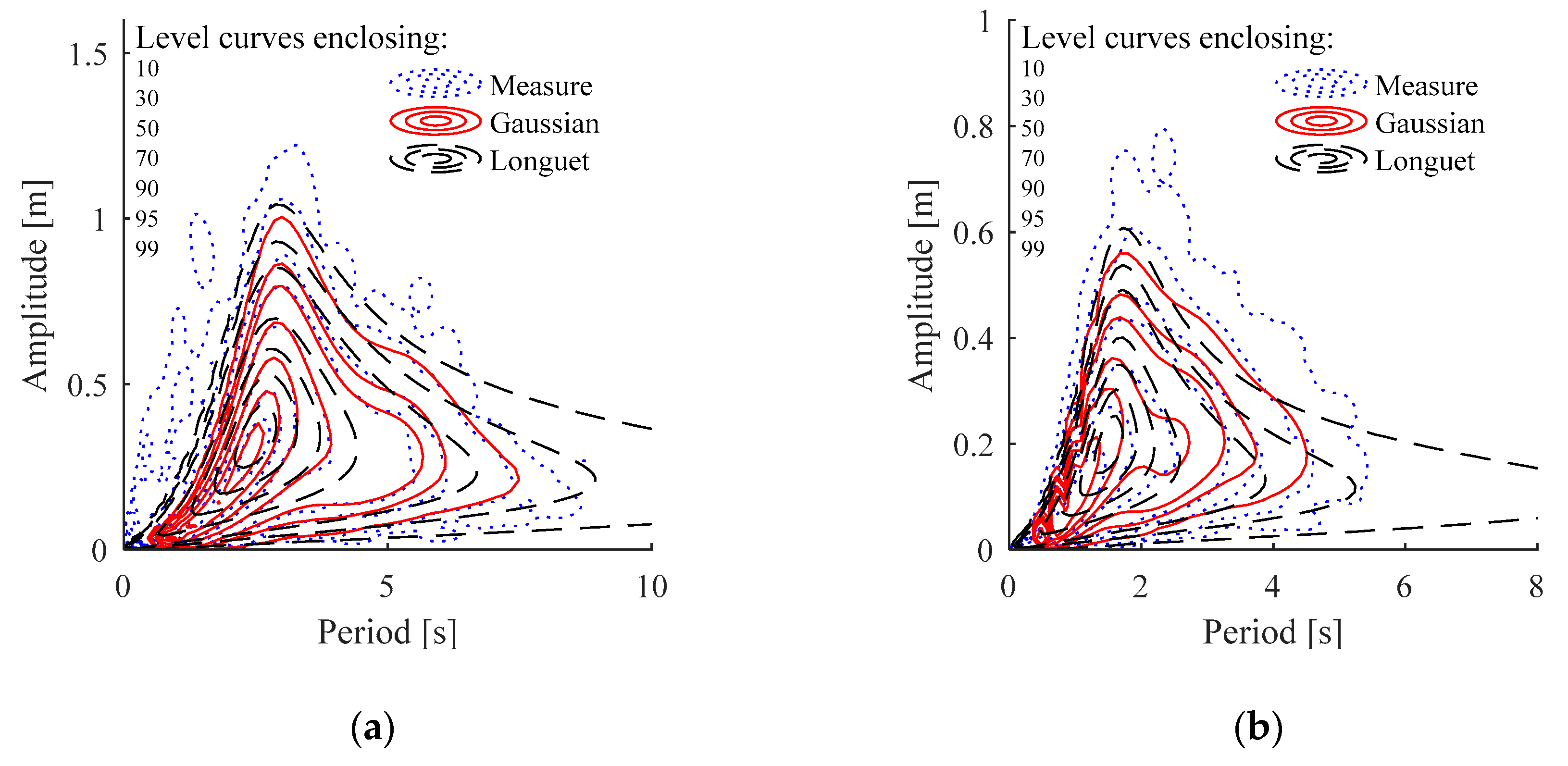
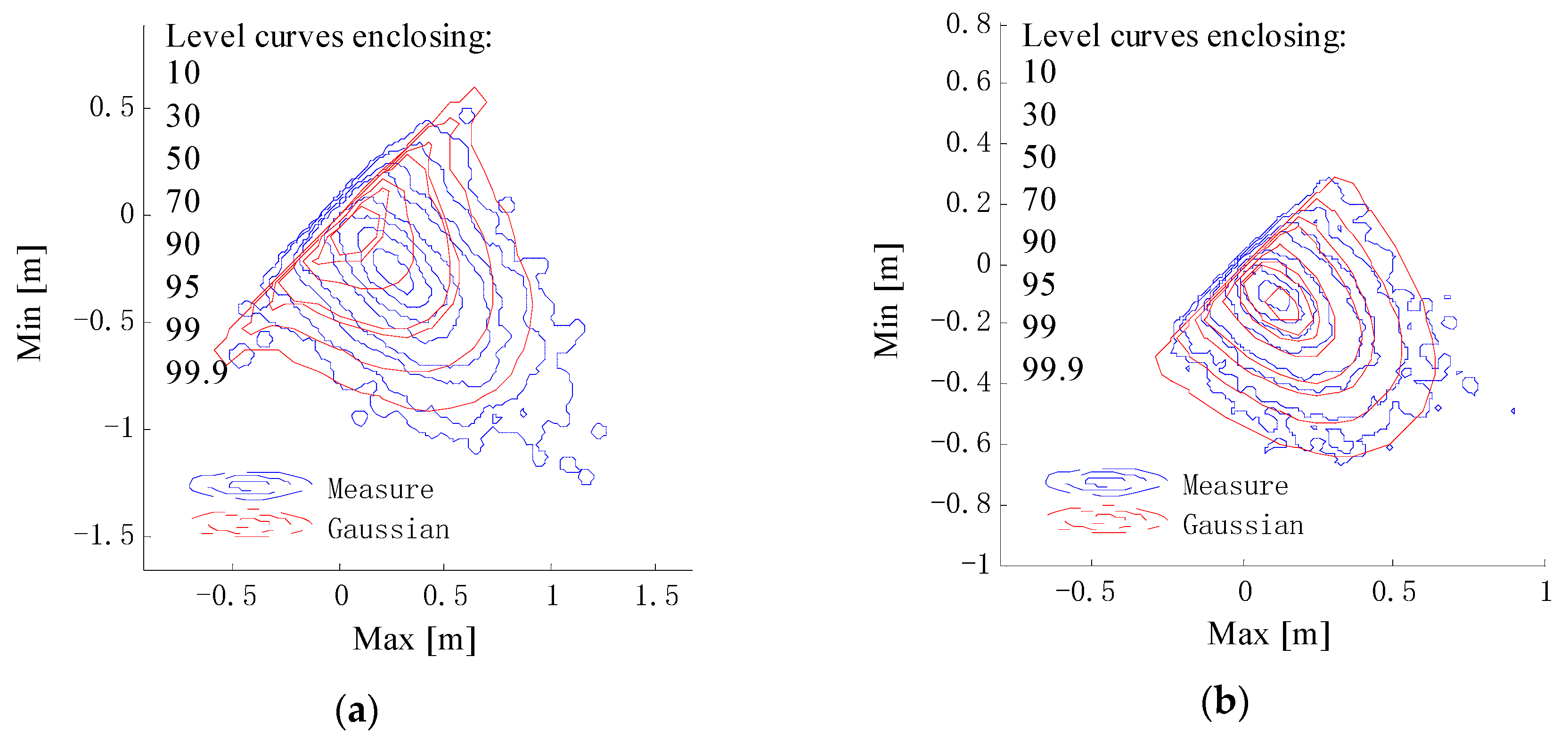
4.3. Joint Density of Wave Characteristics
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bruschi, R.; Vitali, L.; Marchionni, L.; Parrella, A.; Mancini, A. Pipe technology and installation equipment for frontier deep water projects. Ocean Eng. 2015, 108, 369–392. [Google Scholar] [CrossRef]
- Hosseinlou, F.; Mojtahedi, A. Developing a robust simplified method for structural integrity monitoring of offshore jacket-type platform using recorded dynamic responses. Appl. Ocean Res. 2016, 56, 107–118. [Google Scholar] [CrossRef]
- Zhang, Q.; Draper, S.; Cheng, L.; An, H. Scour below a subsea pipeline in time varying flow conditions. Appl. Ocean Res. 2016, 55, 151–162. [Google Scholar] [CrossRef]
- Sollund, H.A.; Vedeld, K.; Fyrileiv, O.; Hellesland, J. Improved assessments of wave-induced fatigue for free spanning pipelines. Appl. Ocean Res. 2016, 61, 130–147. [Google Scholar] [CrossRef]
- Nielsen, U.D.; Stredulinsky, D.C. Sea state estimation from an advancing ship–A comparative study using sea trial data. Appl. Ocean Res. 2012, 34, 44. [Google Scholar] [CrossRef]
- Wang, F.; Chen, J.; Gao, S.; Tang, K.; Meng, X. Development and sea trial of real-time offshore pipeline installation monitoring system. Ocean Eng. 2017, 146, 468–476. [Google Scholar] [CrossRef]
- Tian, X.; Wang, P.; Li, X.; Wu, X.; Lu, W.; Wu, C.; Hu, Z.; Rong, H.; Sun, H.; Wang, A.; et al. Design and application of a monitoring system for the floatover installation. Ocean Eng. 2018, 150, 194–208. [Google Scholar] [CrossRef]
- Rachmayani, R.; Ningsih, N.S.; Adiprabowo, S.R.; Nurfitri, S. Ocean wave characteristic in the Sunda Strait using Wave Spectrum Model. IOP Conf. Ser. Earth Environ. Sci. 2018, 139, 012025. [Google Scholar] [CrossRef]
- Hui, X.; Miao, M.; Yan, L. Analysis of the Measured Wave Data around Toumen Island Sea Area in Taizhou. In Proceedings of the 2015 International Conference on Intelligent Transportation, Big Data and Smart City, Halong Bay, Vietnam, 19–20 December 2015; pp. 113–116. [Google Scholar] [CrossRef]
- Venkatesan, R.; Vengatesan, G.; Vedachalam, N.; Muthiah, M.A.; Lavanya, R.; Atmanand, M.A. Reliability assessment and integrity management of data buoy instruments used for monitoring the Indian Seas. Appl. Ocean Res. 2016, 54, 1–11. [Google Scholar] [CrossRef]
- Sun, S.Z.; Li, H.; Sun, H. Measurement and analysis of coastal waves along the north sea area of China. Pol. Marit. Res. 2016, 23, 72–78. [Google Scholar] [CrossRef]
- O’Reilly, W.C.; Olfe, C.B.; Thomas, J.; Seymour, R.J.; Guza, R.T. The California coastal wave monitoring and prediction system. Coast. Eng. 2016, 116, 118–132. [Google Scholar] [CrossRef]
- Kim, B.N.; Choi, B.K.; Kim, S.H.; Kim, D.S. Real-time wave height measurements using a cable type wave monitoring system in shallow waters. In Proceedings of the 2015 IEEE/OES Eleveth Current, Waves and Turbulence Measurement (CWTM), St. Petersburg, FL, USA, 2–6 March 2015. [Google Scholar]
- Ruju, A.; Passarella, M.; Trogu, D.; Buosi, C.; Ibba, A.; De Muro, S. An Operational Wave System within the Monitoring Program of a Mediterranean Beach. J. Mar. Sci. Eng. 2019, 7, 32. [Google Scholar] [CrossRef]
- Seim, H.E.; Fletcher, M.; Mooers, C.N.K.; Nelson, J.R.; Weisberg, R.H. Towards a regional coastal ocean observing system: An initial design for the Southeast Coastal Ocean Observing Regional Association. J. Mar. Syst. 2009, 77, 261–277. [Google Scholar] [CrossRef]
- Singh, U.N.; Nicolae, D.N.; Mori, Y.; Shimada, S.; Shiina, T.; Baji, H.; Takemoto, S. Dynamic analysis of sea wave data measured by LED lidar. In Proceedings of the SPIE Remote Sensing, Edinburgh, UK, 26–29 September 2016; Volume 10006, p. 100060G. [Google Scholar] [CrossRef]
- Seemann, J.; Carrasco, R.; Stresser, M.; Horstmann, J.; Stole-Hentschel, S.; Trulsen, K.; Borge, J.C.N. An Operational Wave Monitoring System Based on a Dopplerized Marine Radar. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017. [Google Scholar]
- Al-Hajeri, S.; Wylie, S.R.; Shaw, A.; Al-Shamma’a, A.I. Real time EM waves monitoring system for oil industry three phase flow measurement. J. Phys. Conf. Ser. 2009, 178, 012030. [Google Scholar] [CrossRef]
- Yasui, T.; Nakamura, R.; Kawamoto, K.; Ihara, A.; Fujimoto, Y.; Yokoyama, S.; Inaba, H.; Minoshima, K.; Nagatsuma, T.; Araki, T. Real-time monitoring of continuous-wave terahertz radiation using a fiber-based, terahertz-comb-referenced spectrum analyzer. Opt. Express 2009, 17, 17034–17043. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Terada, H.; Yamada, A. Real-time monitoring system of vortex wind field using coded acoustic wave signals between parallel array elements. Jpn. J. Appl. Phys. 2014, 53, 7–18. [Google Scholar] [CrossRef]
- Armenio, E.; Ben Meftah, M.; Bruno, M.F.; De Padova, D.; De Pascalis, F.; De Serio, F.; Di Bernardino, A.; Mossa, M.; Leuzzi, G.; Monti, P. Semi enclosed basin monitoring and analysis of meteo, wave, tide and current data: Sea monitoring. In Proceedings of the 2016 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Bari, Italy, 13–14 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Young, I.R.; Rosenthal, W.; Ziemer, F. A three-dimensional analysis of marine radar images for the determination of ocean wave directionality and surface currents. J. Geophys. Res. Oceans 1985, 90, 1049–1059. [Google Scholar] [CrossRef]
- Senet, C.M.; Seemann, J.; Flampouris, S.; Ziemer, F. Determination of bathymetric and current maps by the method DiSC based on the analysis of nautical X-band radar image sequences of the sea surface. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2267–2279. [Google Scholar] [CrossRef]
- Young, I.R. Global ocean wave statistics obtained from satellite observations. Appl. Ocean Res. 1994, 16, 235–248. [Google Scholar] [CrossRef]
- Kim, C.H. Fourier Transform and Wave Spectra. In Nonlinear Waves and Offshore Structures; World Scientist Publishing: Singapore, 2014; pp. 55–91. Available online: https://doi.org/10.1142/9789812775139_0002 (accessed on 14 March 2019).
- Krogstad, H.E.; Barstow, S.; Haug, O. Direction distribution in wave spectra. In Proceedings of the 1997 3rd International Symposium on Ocean Wave Measurement and Analysis, Waves 97, Ramada Plaza Resort Virginia Beach, VA, USA, 3–7 November 1997; Volume 2, pp. 883–895. [Google Scholar]
- Baxevani, A.; Rychlik, I. Maxima for Gaussian seas. Ocean Eng. 2006, 33, 895–911. [Google Scholar] [CrossRef]
- Longuet-Higgins Michael, S. On the joint distribution wave periods and amplitudes in a random waves field. Proc. R. Soc. 1983, 389, 240–258. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wave Scale | Wave Definition | Hs [m] |
|---|---|---|
| 0 | Calm-glassy | 0 |
| 1 | Calm-rippled | <0.25 |
| 2 | Smooth wavelet | 0.25~<0.8 |
| 3 | Slight wave | 0.8~<1.25 |
| 4 | Moderate | 1.25~<2.00 |
| Dataset | Ts [s] | T [min] | Hs [m] |
|---|---|---|---|
| Group 1 | 0.5 | 750 | 1.0583 |
| Group 2 | 0.5 | 950 | 0.6069 |
| Function | Expression | Parameter Range | Fourie Coefficient |
|---|---|---|---|
| cos-2s | 0 < s | ||
| Poisson | 0 < x < 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, D.; Cui, T.; Yuan, L.; Zan, Y.; Wu, Z. Monitoring and Analysis of Wave Characteristics during Pipeline End Termination Installation. Processes 2019, 7, 569. https://doi.org/10.3390/pr7090569
Han D, Cui T, Yuan L, Zan Y, Wu Z. Monitoring and Analysis of Wave Characteristics during Pipeline End Termination Installation. Processes. 2019; 7(9):569. https://doi.org/10.3390/pr7090569
Chicago/Turabian StyleHan, Duanfeng, Ting Cui, Lihao Yuan, Yingfei Zan, and Zhaohui Wu. 2019. "Monitoring and Analysis of Wave Characteristics during Pipeline End Termination Installation" Processes 7, no. 9: 569. https://doi.org/10.3390/pr7090569
APA StyleHan, D., Cui, T., Yuan, L., Zan, Y., & Wu, Z. (2019). Monitoring and Analysis of Wave Characteristics during Pipeline End Termination Installation. Processes, 7(9), 569. https://doi.org/10.3390/pr7090569