

AI-Based Wind Tracking and Yaw Control System for Optimizing Wind Turbine Efficiency

 , ,
, , 
Abstract
1. Introduction
2. Methodology
2.1. Energy Available in the Wind
2.2. The Operating Principle of the Yaw Control Mechanism
2.3. Wind Data Acquisition and Preprocessing
2.4. Motivation for LSTM-Based Predictive Yaw Control Strategy
2.5. Block Diagram
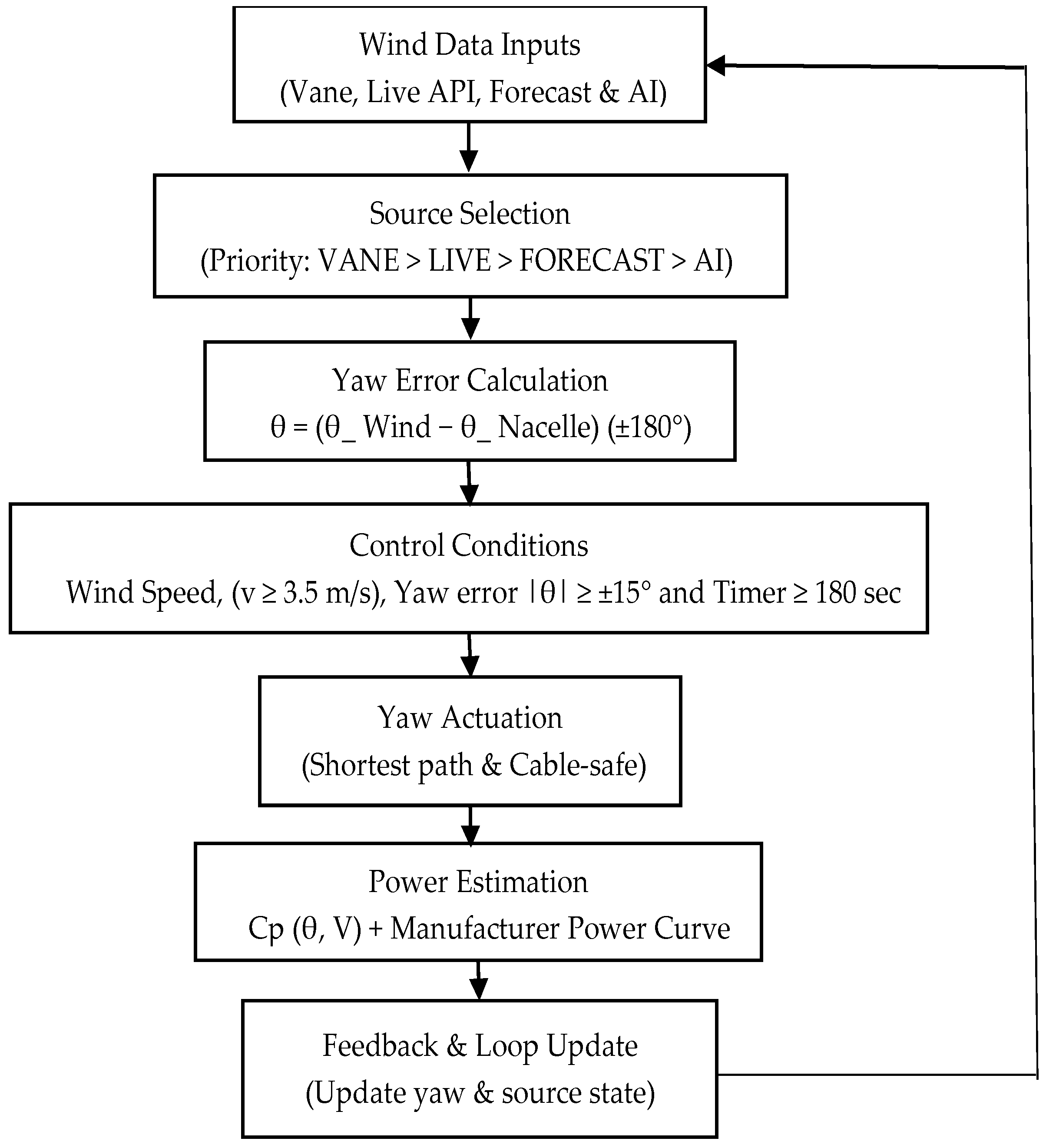
2.6. System Algorithm
2.7. Yaw Correction Logic Based on Wind Direction and Rotor Alignment
2.8. Baseline Yaw Control Strategy
3. Control Design
4. System Design and Implementation
4.1. Hardware Implementation
- Microcontroller: Arduino Uno R4 WiFi (Arduino, Turin, Italy);
- Wind vane: RS-FXJT05 (Rika Sensors, Handan, China);
- Stepper motor: NEMA 17 Stepper Motor (Wantai Motor, Changzhou, China);
- Motor driver: TB6600 Stepper Motor Driver (Toshiba, Tokyo, Japan).
4.2. Software Implementation: MATLAB/Simulink Model
4.2.1. Wind Environment Subsystem
4.2.2. Yaw Controller Subsystem
4.2.3. Yaw Mode Selector Subsystem
4.2.4. Power Output Calculation Subsystem
5. Result and Discussion
5.1. Real-Time Microcontroller Output Log
5.2. AI Training and Performance Evaluation Using MATLAB
5.2.1. AI Training Workflow and Dataset Structure
5.2.2. AI Prediction Result and MATLAB Validation
5.3. Output of MATLAB/SIMULINK
5.3.1. LIVE-Based Yaw Control Performance Analysis
5.3.2. AI-Based Yaw Control Performance
5.3.3. Overall Performance Comparison Between LIVE and AI-Based Yaw Control
5.4. Real-Time Microcontroller Output During AI Prediction Mode
 264.7° (W) 294.3° (WNW) 270.0° (W) 299.5° (WNW)
264.7° (W) 294.3° (WNW) 270.0° (W) 299.5° (WNW) 5.5. Scalability of the Proposed Yaw Control System for Large-Scale Wind Turbines
6. Cost–Benefit Analysis
Comparative Cost–Benefit Summary
7. Limitations and Future Directions
8. Concluding Remarks
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Global Wind Energy Council. Global Wind Report 2024; GWEC: Brussels, Belgium, 2024; Available online: https://www.gwec.net/hubfs/Website-2023/documents/GWEC-2024.pdf?hsLang=en (accessed on 3 September 2025).
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook, 3rd ed.; John Wiley & Sons: Chichester, UK, 2021; pp. 17–21. [Google Scholar]
- Burton, T.; Sharpe, D.; Jenkins, N.; Bossanyi, E. Wind Energy Handbook, 2nd ed.; Wiley: Chichester, UK, 2011; pp. 97–98. [Google Scholar]
- Liew, J.Y.; Urbán, A.M.; Andersen, S.J. Analytical Model for the Power–Yaw Sensitivity of Wind Turbines Operating in Full Wake. Wind Energy Sci. 2020, 5, 427–437. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z. Fatigue Analysis of Wind Turbine and Load Reduction through Wind-Farm-Level Yaw Control. Energy 2025, 326, 136266. [Google Scholar] [CrossRef]
- Gao, L.; Li, H.; Wang, J.; Yang, C. Data-Driven Yaw Misalignment Correction for Wind Turbines. Energies 2021, 14, 3481. Available online: https://arxiv.org/pdf/2109.08998 (accessed on 3 September 2025).
- Astolfi, D.; Pandit, R.; Lombardi, A.; Terzi, L. Diagnosis of Wind Turbine Systematic Yaw Error through Nacelle Anemometer Measurement Analysis. Sustain. Energy Grids Netw. 2023, 34, 101071. [Google Scholar] [CrossRef]
- Pei, Y.; Qian, Z.; Jing, B.; Kang, D.; Zhang, L. Data-Driven Method for Wind Turbine Yaw Angle Sensor Zero-Point Shifting Fault Detection. Energies 2018, 11, 553. [Google Scholar] [CrossRef]
- Mittelmeier, N.; Kühn, M. Determination of optimal wind turbine alignment into the wind and detection of alignment changes with SCADA data. Wind Energy Sci. 2018, 3, 395–408. Available online: https://wes.copernicus.org/articles/3/395/2018/ (accessed on 4 September 2025). [CrossRef]
- Liu, Y.; Liu, S.; Zhang, L.; Cao, F.; Wang, L. Optimization of the Yaw Control Error of Wind Turbine. Front. Energy Res. 2021, 9, 626681. Available online: https://www.frontiersin.org/articles/10.3389/fenrg.2021.626681/pdf (accessed on 7 September 2025). [CrossRef]
- Saenz-Aguirre, A.; Zulueta, E.; Fernandez-Gamiz, U.; Ramos-Hernanz, J.A.; Lopez-Guede, J.M. Self-Tuning Yaw Control Strategy of a Horizontal-Axis Wind Turbine Based on Machine Learning. In Numerical Methods for Energy Applications; Mahdavi Tabatabaei, N., Bizon, N., Eds.; Springer: Cham, Switzerland, 2021; pp. 879–900. [Google Scholar] [CrossRef]
- Bu, F.; Huang, W.; Hu, Y.; Xu, Y.; Shi, K.; Wang, Q. Study and Implementation of a Control Algorithm for Wind Turbine Yaw Control System. In Proceedings of the IEEE Canada Electrical Power Conference (EPC), Montreal, QC, Canada, 26–28 October 2009; pp. 1–7. [Google Scholar] [CrossRef]
- Kadoche, E.; Gourvénec, S.; Pallud, M.; Levent, T. Multi-Agent Reinforcement Learning for Wind Farm Yaw Control. Energies 2023, 16, 7892. [Google Scholar] [CrossRef]
- Puech, A.; Read, J. Reinforcement Learning for Optimal Single-Turbine Yaw Control. Energies 2023, 16, 4521. Available online: https://arxiv.org/pdf/2305.01299 (accessed on 12 September 2025).
- Al-Rubaye, S.Z.; Gil-Pita, R. A Novel Optimization Method for Maximizing Wind Farm Performance through Turbine Positioning and Yaw Angle Estimation. Energy Convers. Manag. 2026, 347, 120546. [Google Scholar] [CrossRef]
- Anagnostopoulos, S.; Bauer, J.; Clare, M.C.A.; Piggott, M.D. Multi-Fidelity ML Models for Real-Time Active Yaw Control in Wind Farms. Energies 2023, 16, 6124. Available online: https://arxiv.org/pdf/2303.16274 (accessed on 8 September 2025).
- Yang, J.; Liu, Y.; Zhang, Z.; Ma, Z.; Wang, Y. Review of Control Strategy of Large Horizontal-Axis Wind Turbines Yaw System. Wind Energy 2021, 24, 97–115. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, H. Research on Active Yaw Mechanism of Small Wind Turbines. Energy Procedia 2012, 16, 53–57. [Google Scholar] [CrossRef][Green Version]
- Islam, M.; Biswas, P.; Rahman, M.; Rahman, A.; Hossain, M. An Intelligent Wind Turbine with Yaw Mechanism Using Machine Learning to Reduce High-Cost Sensors Quantity. ResearchGate Preprint. 2023. Available online: https://ijeecs.iaescore.com/index.php/IJEECS/article/view/29384 (accessed on 24 February 2026).
- Joshi, A.Y.; Soni, S.G. Design of Active Yaw Control Mechanism for Small Horizontal Axis Wind Turbines. Int. J. Res. Sci. Innov. 2015, 2, 47–49. Available online: https://rsisinternational.org/Issue11/47-49.pdf (accessed on 9 September 2025).
- Kerling, I.M.; Zimmer, D. A Yaw Control Approach Using Economic Aspects. In Proceedings of the 5th International Conference on Contemporary Problems of Thermal Engineering (CPOTE 2018), Gliwice, Poland, 18–21 September 2018; Institute of Thermal Technology: Gliwice, Poland, 2018; Available online: https://elib.dlr.de/123975/1/CPOTE2018_final_kerling.pdf (accessed on 18 September 2025).
- Tsioumas, E.; Karakasis, N.; Jabbour, N.; Mademlis, C. Indirect Estimation of the Yaw-Angle Misalignment in a Horizontal Axis Wind Turbine. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edmonton, AB, Canada, 21–23 June 2017; pp. 1239–1246. [Google Scholar] [CrossRef]
- Shahadat, M.M.Z.; Chaity, T.T.; Ahmed, M.M.; Kader, M.I.; Snigdho, N.A. Enhancing the Wind Energy Harvesting Capacity of a Horizontal Axis Wind Turbine (HAWT) Using a Novel Wind Tracking System. In Proceedings of the IEEE International Conference on Power, Electrical, Electronics and Industrial Applications (PEEIACON 2024), Rajshahi, Bangladesh, 12–13 September 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Abhi, S.B.; Hossain, M.I.; Hoque Suny, R.; Zahura, F.T.; Hazari, M.R.; Jahan, E.; Mannan, M.A. Design and Implementation of a Smart Wind Turbine with Yaw Mechanism. In Proceedings of the 3rd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST 2023), Dhaka, Bangladesh, 7–8 January 2023; pp. 358–362. [Google Scholar] [CrossRef]
- Yin, X.; Zhao, X. LSTM Predictive Yaw Control for Offshore Wind Turbines. Energies 2021, 14, 6301. [Google Scholar]
- Yang, Y.; Solomin, E.V.; Shishkov, A.N. Wind Direction Prediction Based on Nonlinear Autoregression and Elman Neural Networks for the Wind Turbine Yaw System. Preprint, SSRN 4128942. 2022. Available online: http://dx.doi.org/10.2139/ssrn.4128942 (accessed on 1 February 2026).
- Rott, A.; Höning, L.; Hulsman, P.; Lukassen, L.J.; Moldenhauer, C.; Kühn, M. Wind Vane Correction During Yaw Misalignment for Horizontal-Axis Wind Turbines. Wind Energy Sci. 2023, 8, 1755–1770. [Google Scholar] [CrossRef]
- Santoni, C.; Zhang, Z.; Sotiropoulos, F.; Khosronejad, A. A Data-Driven Machine Learning Approach for Yaw Control Applications of Wind Farms. Theor. Appl. Mech. Lett. 2023, 13, 100471. [Google Scholar] [CrossRef]
- Elkodama, A.; Abdellatif, A.; Shaaban, S.; Rushdi, M.A.; Yoshida, S.; Ismaiel, A. Investigation into the Yaw Control of a Twin-Rotor 10 MW Wind Turbine. Appl. Sci. 2024, 14, 9810. [Google Scholar] [CrossRef]
- IEC 61400-1:2019; Wind Energy Generation Systems–Part 1: Design Requirements. International Electrotechnical Commission: Geneva, Switzerland, 2019.
- Falcon Silence 3.6 kW Wind Turbine. Turbinawiatrowa. Available online: https://www.turbinawiatrowa.com/EN-H4/oferta/3/turbina-wiatrowa-36kw-falcon-silence.html (accessed on 5 January 2026).
- Hansen, M.O.L. Aerodynamics of Wind Turbines, 3rd ed.; Routledge: New York, NY, USA, 2015; pp. 21–24. [Google Scholar]
- Sereema. Yaw Misalignment: (R)Evolution; Technical White Paper; Sereema SAS: Montpellier, France, 2019; p. 11. Available online: https://www.sereema.com/documents/yaw-misalignment-white-paper (accessed on 17 November 2025).
- Historical and Live Weather Data for Paradise, Newfoundland and Labrador (City ID: 6324733). Available online: https://openweathermap.org/city/5905393 (accessed on 12 January 2026).
- Environment and Climate Change Canada. Historical Climate Data—Search and Download. Government of Canada. 2024. Available online: https://climate.weather.gc.ca/historical_data/search_historic_data_e.html (accessed on 10 January 2026).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Yaw Error (°) | Fraction of Retained Power | Power Output (kW) | Gross Power Loss (kW) | Loss (%) |
|---|---|---|---|---|
| 5° | 0.9886 | 3.56 | 0.041 | 1.14% |
| 10° | 0.9551 | 3.44 | 0.162 | 4.49% |
| 15° | 0.9012 | 3.24 | 0.356 | 9.88% |
| 20° | 0.8297 | 2.99 | 0.613 | 17.02% |
| 25° | 0.7444 | 2.68 | 0.920 | 25.56% |
| Longitude (x) | Latitude (y) | Date/Time (UTC) | Wind Dir (Deg) | Wind Speed (m/s) |
|---|---|---|---|---|
| −53.11 | 48.67 | 5 December 2025 0:30 | 160 | 7.78 |
| −53.11 | 48.67 | 5 December 2025 0:35 | 158 | 7.25 |
| −53.11 | 48.67 | 5 December 2025 0:40 | 156 | 7.23 |
| −53.11 | 48.67 | 5 December 2025 0:45 | 155 | 7.88 |
| −53.11 | 48.67 | 5 December 2025 0:50 | 154 | 7.86 |
| −53.11 | 48.67 | 5 December 2025 0:55 | 152 | 7.88 |
| −53.11 | 48.67 | 5 December 2025 1:00 | 155 | 7.77 |
| −53.11 | 48.67 | 5 December 2025 1:05 | 153 | 7.65 |
| Category | Approach | Wind Trend Learning | Real-Time Use | Training Reliability | Computational Cost | Suitability for Small Turbines |
|---|---|---|---|---|---|---|
| Data-Driven (Non-ML) | Linear/Polynomial Regression | Low | High | High | Very Low | Limited (cannot track rapid direction changes) |
| Machine Learning (ML) | Random Forest/Tree-Based Models | Moderate | Moderate | High | Moderate–High | Suitable for static estimation, not short-term prediction |
| Reinforcement Learning (RL) | RL-based Yaw Control | High | Low–Moderate | Low | Very High | Impractical for small turbines |
| Machine Learning (ML) | LSTM | High | High | High | Moderate | Highly suitable and robust |
| Wind Dir | Cos T3 | Sin T3 | Wind Dir | Cos T2 | Sin | Wind Dir T1 | Cos T1 | Sin T1 | Wind Speed | Wind Dir | Cos T | Sin T |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| T3 | T2 | T2 | T | |||||||||
| 360 | 1 | 0 | 360 | 1 | 0 | 360 | 1 | 0 | 5.81 | 360 | 1 | 0 |
| 360 | 1 | 0 | 360 | 1 | 0 | 360 | 1 | 0 | 6.17 | 20 | 0.94 | 0.34 |
| 360 | 1 | 0 | 360 | 1 | 0 | 20 | 0.94 | 0.34 | 6.17 | 20 | 0.94 | 0.34 |
| 360 | 1 | 0 | 20 | 0.94 | 0.3 | 20 | 0.94 | 0.34 | 6.17 | 20 | 0.94 | 0.34 |
| 20 | 0.94 | 0.34 | 20 | 0.94 | 0.3 | 20 | 0.94 | 0.34 | 6.17 | 20 | 0.94 | 0.34 |
| 20 | 0.94 | 0.34 | 20 | 0.94 | 0.3 | 20 | 0.94 | 0.34 | 6.17 | 20 | 0.94 | 0.34 |
| 20 | 0.94 | 0.34 | 20 | 0.94 | 0.3 | 20 | 0.94 | 0.34 | 7.15 | 360 | 1 | 0 |
| 20 | 0.94 | 0.34 | 20 | 0.94 | 0.3 | 360 | 1 | 0 | 7.15 | 360 | 1 | 0 |
| 20 | 0.94 | 0.34 | 360 | 1 | 0 | 360 | 1 | 0 | 7.15 | 360 | 1 | 0 |
| 360 | 1 | 0 | 360 | 1 | 0 | 360 | 1 | 0 | 7.15 | 360 | 1 | 0 |
| Time (s) | Source | Wind Dir (°) | Wind Speed | AI Predicted Yaw (°) | Motor Yaw (°) | Yaw Error (°) | Yaw Movement | Wi-Fi |
|---|---|---|---|---|---|---|---|---|
| 1581.2 | LIVE | 80 | 3.60 | 5 | 80.0 | +0.0 | —(initial) | ON |
| 1762.06 | LIVE | 80 | 3.60 | 5 | 80.0 | +0.0 | 0.0 | ON |
| 3525.78 | LIVE | 293 | 1.79 | 262 | 293.0 | −0.0 | −147 | ON |
| 3526.92 | LIVE | 293 | 1.79 | 315 | 293.0 | −0.0 | 0.0 | ON |
| 4131.01 | LIVE | 60 | 4.12 | 355 | 59.9 | +0.1 | +126.9 | ON |
| 4132.13 | LIVE | 60 | 4.12 | 5 | 59.9 | +0.1 | 0.0 | ON |
| Time (min) | Yaw Control Method | Power Output (kW) | Power Coefficient (Cp) |
|---|---|---|---|
| 60 | LIVE-based | 0.508 | 0.99 |
| 60 | AI-based | 0.805 | 0.99 |
| 300 | LIVE-based | 2.195 | 0.923 |
| 300 | AI-based | 2.687 | 0.911 |
| 420 | LIVE-based | 3.298 | 0.98 |
| 420 | AI-based | 3.499 | 0.98 |
| 510 | LIVE-based | 0.896 | 0.945 |
| 510 | AI-based | 1.341 | 0.941 |
| Aspect | Conventional System | AI-Based Smart System | Benefit/Savings |
|---|---|---|---|
| Wind Direction Input | Physical wind vane sensor | Online live wind data via AI | Eliminates sensor cost |
| Data Communication | Transmitter–receiver modules | Cloud-based online data | Removes hardware modules |
| Yaw Motor Operation | Continuous adjustments | Threshold-based activation | Lower Motor stress, longer lifespan |
| GPS-Assisted Location | Not available | GPS used to obtain nearest weather-station data | Higher directional accuracy, improved power capture |
| Power Capture Efficiency | 90–95% | 98–99% | 3–5% higher power generation |
| Energy Use for Yaw | High | Low | 10–15% energy saving |
| Maintenance Frequency | Regular servicing | Minimal maintenance | 30–40% maintenance cost |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.
Share and Cite
Mahmud, S.; Tarif, M.F.; Khan, A.A.; Ahmed, H.F.; Khan, U.A. AI-Based Wind Tracking and Yaw Control System for Optimizing Wind Turbine Efficiency. Processes 2026, 14, 1084. https://doi.org/10.3390/pr14071084
Mahmud S, Tarif MF, Khan AA, Ahmed HF, Khan UA. AI-Based Wind Tracking and Yaw Control System for Optimizing Wind Turbine Efficiency. Processes. 2026; 14(7):1084. https://doi.org/10.3390/pr14071084
Chicago/Turabian StyleMahmud, Shoab, Mir Foysal Tarif, Ashraf Ali Khan, Hafiz Furqan Ahmed, and Usman Ali Khan. 2026. "AI-Based Wind Tracking and Yaw Control System for Optimizing Wind Turbine Efficiency" Processes 14, no. 7: 1084. https://doi.org/10.3390/pr14071084
APA StyleMahmud, S., Tarif, M. F., Khan, A. A., Ahmed, H. F., & Khan, U. A. (2026). AI-Based Wind Tracking and Yaw Control System for Optimizing Wind Turbine Efficiency. Processes, 14(7), 1084. https://doi.org/10.3390/pr14071084