1. Introduction
The global energy market is shifting toward renewable energy sources (RESs) as a response to climate change and shrinking stocks of fossil fuels [
1]. The shift is made easier through effective policy frameworks such as the Paris Agreement and local policies like the European Green Deal [
2], which establish challenging renewable penetration targets. Microgrids are an effective solution for achieving such targets, due to their decentralized control of energy, which can enhance grid robustness and reduce transmission losses [
3]. The natural fluctuation in photovoltaic (PV) and wind turbine (WT) energy, as well as non-stationary loads, is a primary challenge for energy management systems (EMSs) [
4]. Real-time decision-making in dynamic situations, in which classical prediction and optimization methods are not always effective [
5], makes things even more difficult.
Current advancements in machine learning (ML) offer promise in overcoming such challenges. The multilayer perceptron artificial neural networks (MLP-ANNs), when trained on the Levenberg–Marquardt (LM) algorithm, in general, are seen to be quite effective in predicting PV and WT generation, achieving as low as 8.22% in solar irradiance’s mean absolute percentage errors [
6]. The LM algorithm is preferred to others like resilient backpropagation (RP) due to high levels of accuracy as well as rapid convergence [
6,
7,
8]. Support Vector Regression (SVR) models also are seen to be effective, employing previous energy production and weather data to optimize accuracy in forecasts as well as optimize resource allocation [
9]. Hybrid ensemble approaches, such as bidirectional long-term memory combined with gradient boosting decision trees and random forests, have further reduced RMSE by 10% in wind power forecasting [
10]. Similarly, extreme gradient boosting (XGBoost) has outperformed SVR and Long Short-Term Memory (LSTM) in short-term solar generation predictions [
11]. Notably, new architectures like Temporal Fusion Transformers (TFTs) and hybrid models that merge recurrent neural networks with feature selection techniques [
12,
13] have significantly improved prediction accuracy, demonstrating a reduction in root mean square error (RMSE) by about 10–15% when compared to conventional statistical approaches [
4]. In addition, approaches that involve wavelet transformations in conjunction with machine learning platforms show promise in identifying non-linear periodic patterns in renewable energy data [
14]. However, issues remain in terms of incorporating high-resolution environmental data and model evaluation across different microgrid setups [
15].
In optimization, traditional methods, such as particle swarm optimization (PSO) and genetic algorithms (GAs), are widely utilized for task scheduling in microgrids [
3,
16]. However, these methods often face premature convergence and computational inefficiency issues, especially under high-dimensional real-time scenarios [
17,
18]. More recent algorithms, such as the Multi-Objective War Strategy Optimization (MOWSO) [
19] and the Enhanced Sparrow Search Algorithm (ESSA) [
20], have shown significant improvements in the exploration–exploitation trade-off, achieving operational cost reductions of up to 18% while addressing carbon emission issues at the same time [
19]. In this direction, several hybrid optimization approaches have recently appeared that combine PSO with the most advanced techniques, such as primal–dual interior point methods and multi-agent system-based frameworks [
21,
22]. Such hybrid models aim at providing even better performances in microgrid operation by properly exploiting the flexibility of PSO and the accuracy of more deterministic methods. It is such hybridization that has been able to address the concerns of system efficiency, power quality, and fuel consumption—issues that are of prime importance for real-world optimization of microgrid operation. Moreover, several advanced strategies have recently been proposed to mitigate issues related to energy management within microgrids. Within this context, the two-layer energy management system in [
23] efficiently performed the optimization process of matching between batteries and fuel costs, with the help of goal programming techniques, proving that by increasing battery lifetimes, there would be a chance to reduce the total operating costs. Other metaheuristics, such as memory-based genetic algorithms [
24] and grey wolf optimization [
25], have also been applied with considerable success to optimize power distribution, reduce costs, and handle renewable variability. Advanced particle swarm optimization methods [
26] have also shown potential in providing 24 h forecasts for load and renewable energy variations, thus ensuring better system adaptability. Hybrid approaches have also significantly enhanced energy management strategies. Fuzzy logic hybridized with grey wolf optimization has efficiently implemented operational cost minimization and fossil fuel emissions by optimally utilizing batteries and minimizing the dependency on conventional energy [
27]. Chaotic and fuzzy self-adaptive particle swarm algorithms have also shown their effectiveness in the microgrid to minimize emissions and reduce costs in multi-objective optimization challenges [
28]. Stand-alone microgrids have already adopted optimization techniques such as the application of a genetic algorithm in the optimal placement of renewable resources and storage devices. Such optimization techniques, by considering environmental variables such as wind and solar irradiance, optimized lifecycle costs while assuring efficient energy use [
29]. Despite this, their scalability to larger microgrids of well over 100 nodes remains an important challenge [
20].
The integration of demand response (DR) programs adds a new dimension to complexity in the management of microgrids. Recent studies show that dynamic pricing strategies, including critical peak pricing (CPP), can yield cost savings of 15.4% through price-sensitive demand response when combined with advanced optimization techniques like Greedy Rat Swarm Optimization [
30]. Similarly, price structures responsive to classes, identified by Stackelberg game models, have proved effective in reducing peak–valley differentials while simultaneously improving participant utility [
31]. Additionally, Thornburg et al. [
32] ratified the benefits of demand-shifting and peak-shaving policies in isolated systems with high levels of renewable energy integration, thus staunching system reliability under generation volatilities. For hybrid AC/DC microgrids, incentivized DR programs, converged across various systems, have proved effective in optimizing energy scheduling and reducing operational costs through flexible resource optimization [
33]. Industrial environments have proved potential, where smart DR programs considering photovoltaic (PV) uncertainty and battery cycling costs can result in lowered manufacturing costs while simultaneously reducing grid strain [
34]. However, systematic analyses documented by Bakhtiari et al. [
35] indicate that these strategies need to traverse three necessary dimensions: (1) economic effectiveness through mechanisms such as power capacity-based dynamic pricing (PCDP) [
36], (2) technical constraints experienced in high-renewable environments [
37], and (3) equity concerns relating to energy distribution [
36]. This triadic challenge highlights the need for holistic DR models that balance policy requirements with the operational capabilities of microgrids in real-time settings. In addition, these strategies need to be balanced cautiously with careful consideration of grid stability and equity, especially in renewable energy-rich regions [
36,
37].
While significant progress has been made in forecasting and optimization for microgrid EMSs, several gaps remain. For instance, most of the existing forecasting models are far from fully capturing the complex nonlinear interactions among photovoltaic generation, wind turbine output, ambient temperature, and load demand, which significantly limits their accuracy under variable and dynamic conditions. While ANN-based models, especially MLP-ANNs, have been very successful in forecasting PV and WT outputs using historical data and meteorological variables [
6,
7], their use within a general framework of energy management systems has not been sufficiently investigated. Most previous work has concentrated on enhancing the accuracy of the forecasts without considering how these models could be integrated within a general framework of energy optimization and decision-making. Moreover, the LM training algorithm has been proved to be more accurate and with higher convergence speed compared to some other methods, such as resilient backpropagation, but its power for solving dynamic and uncertain microgrid environment problems is yet to be tapped. While prior studies [
5,
6,
7,
8,
38] focus on offline optimization, this work’s framework is designed for real-time deployment, though experimental validation remains future work. The dataset comprises 1 year of hourly resolution data (8760 samples) for PV/WT generation, temperature, and load demand from a microgrid in Ajman, UAE. Development and implementation of an MLP-ANN-based forecasting model within energy management systems could bridge the gap in allowing better accuracy and more informed decision-making.
Moreover, most conventional optimization techniques also lack the potential to balance exploration and exploitation effectively, hence resulting in suboptimal scheduling solutions when dealing with high-dimensional nonlinear constraints. This drawback is further exacerbated by the fact that most of the approaches ignore the correlations among the forecasted variables, hence leading to a lot of inefficiencies in scheduling and resource allocation. These challenges call for novel approaches that will integrate advanced forecasting techniques with robust optimization frameworks to enhance the overall efficiency and performance of EMSs.
To address these gaps, this paper proposes an advanced EMS for microgrids that will incorporate sophisticated forecasting and optimization techniques. The major contributions of this research work are as follows:
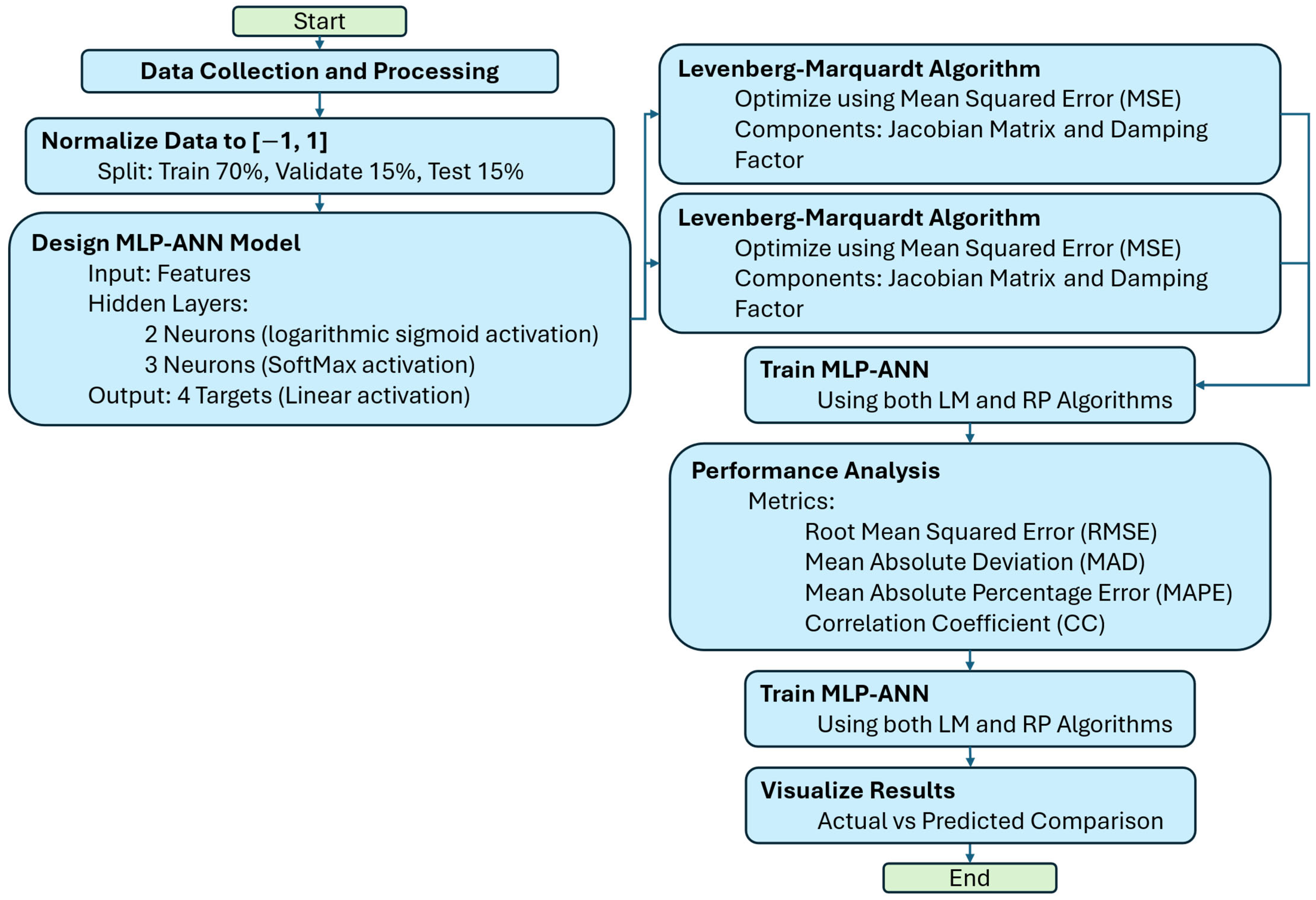
Development of ML-based forecasting models using an MLP-ANN trained with LM and RP algorithms for the prediction of PV and WT generation, ambient temperature, and load demand. The proposed approach will have higher accuracy; LM performed better as compared to RP;
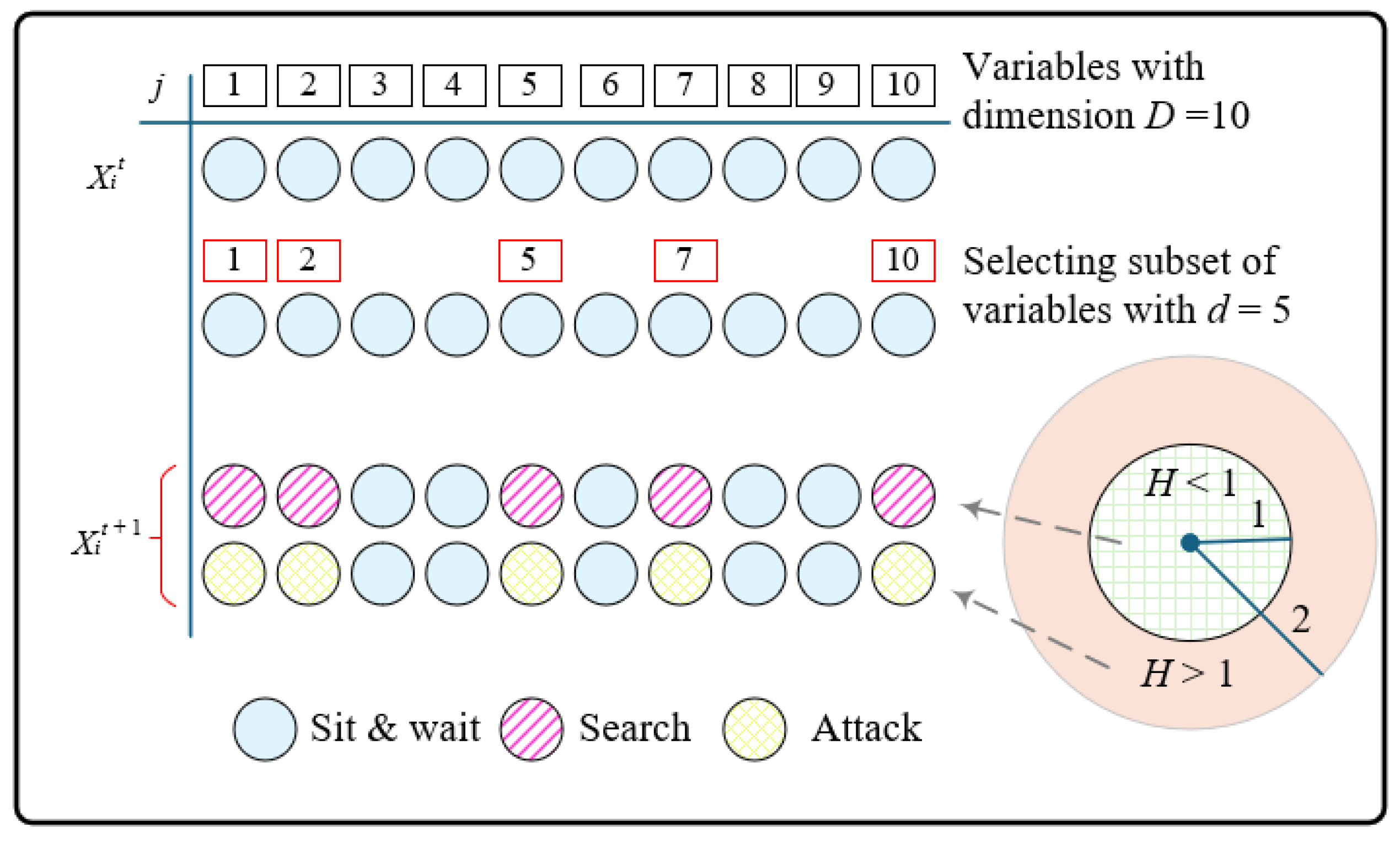
In this paper, the MCO algorithm is proposed, adding advanced mechanisms of exploration and exploitation to traditional metaheuristic approaches, like cheetah optimizer (CO) [
39], PSO, and teaching–learning-based optimization (TLBO) [
40] algorithms. MCO successfully solves microgrid scheduling problems containing high-dimensional and nonlinear optimization;
Incorporation of the DR program within the EMS to handle peak and valley loads will help to ensure that the balance between the supply and consumption of electricity will be much better. This reduces operation costs;
A consideration of correlations among forecasted variables to enhance the reliability and adaptability of the EMS in its operating modes under uncertainty.
The proposed EMS provides a robust solution for cost-effective and reliable microgrid operation by combining high accuracy forecasting with a well-advanced optimization framework, thus contributing to the broader adoption of renewable energy technologies.
The rest of the paper is organized as follows:
Section 2 defines the optimal EMS’s formulation;
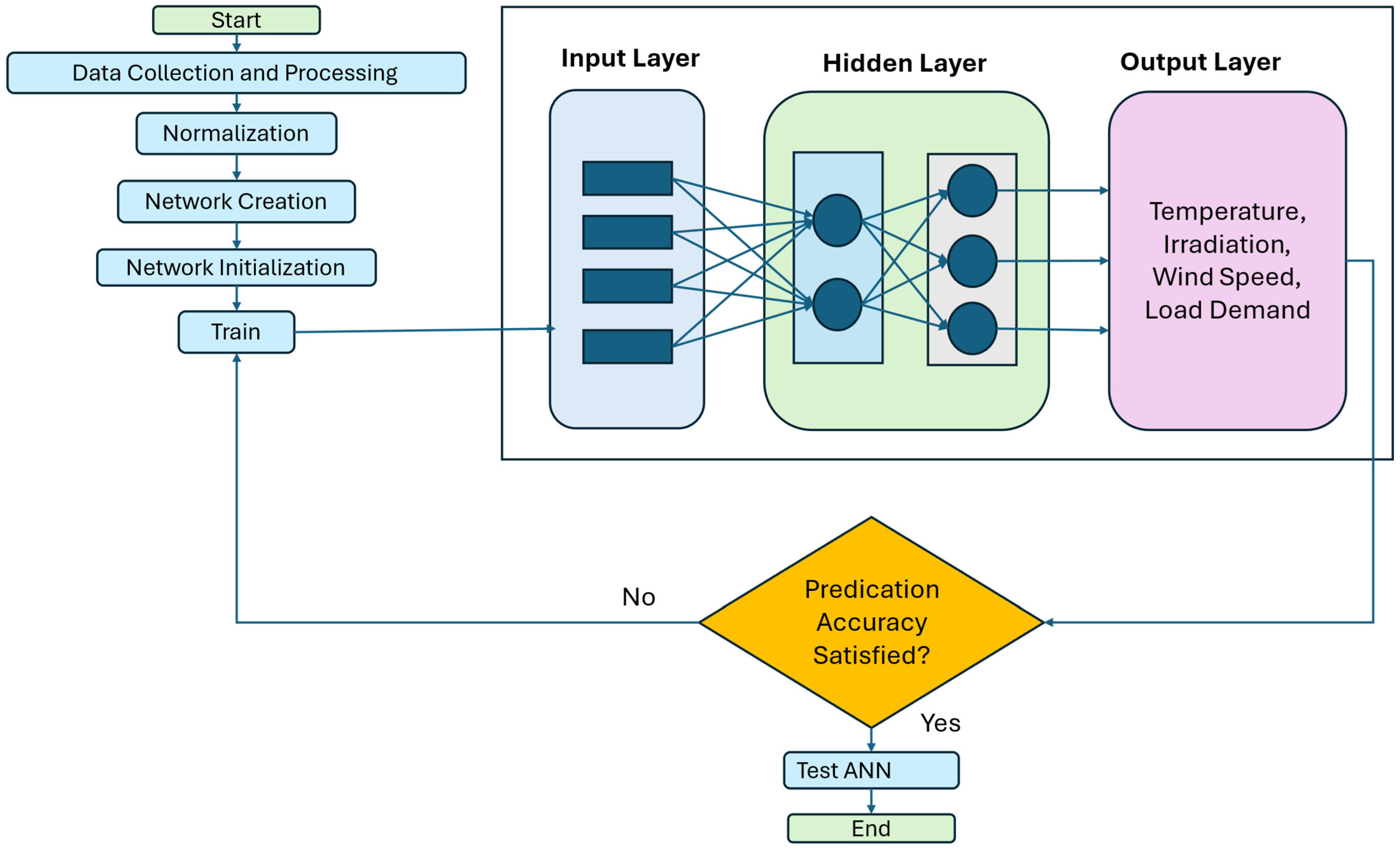
Section 3 presents the proposed MLP-ANN forecasting method.
Section 4 presents the proposed MCO algorithm in detail.
Section 5 discusses the simulation results regarding system performance. Finally,
Section 6 concludes this paper and advises on further areas of research.
5. Results and Discussion
The study used different simulations to test how well the proposed method would work in terms of operational costs. It focused on improving forecasting accuracy and system resilience for better performance. The decentralized prediction and optimization modeling algorithm is executed in MATLAB 2021b (MathWorks, Natick, MA, USA) with the Neural Network Toolbox for MLP-ANN training on an Intel® Core™ I7-6500U processor, operating at 2.5 GHz, with 8.00 GB of RAM.
5.1. Test System Overview
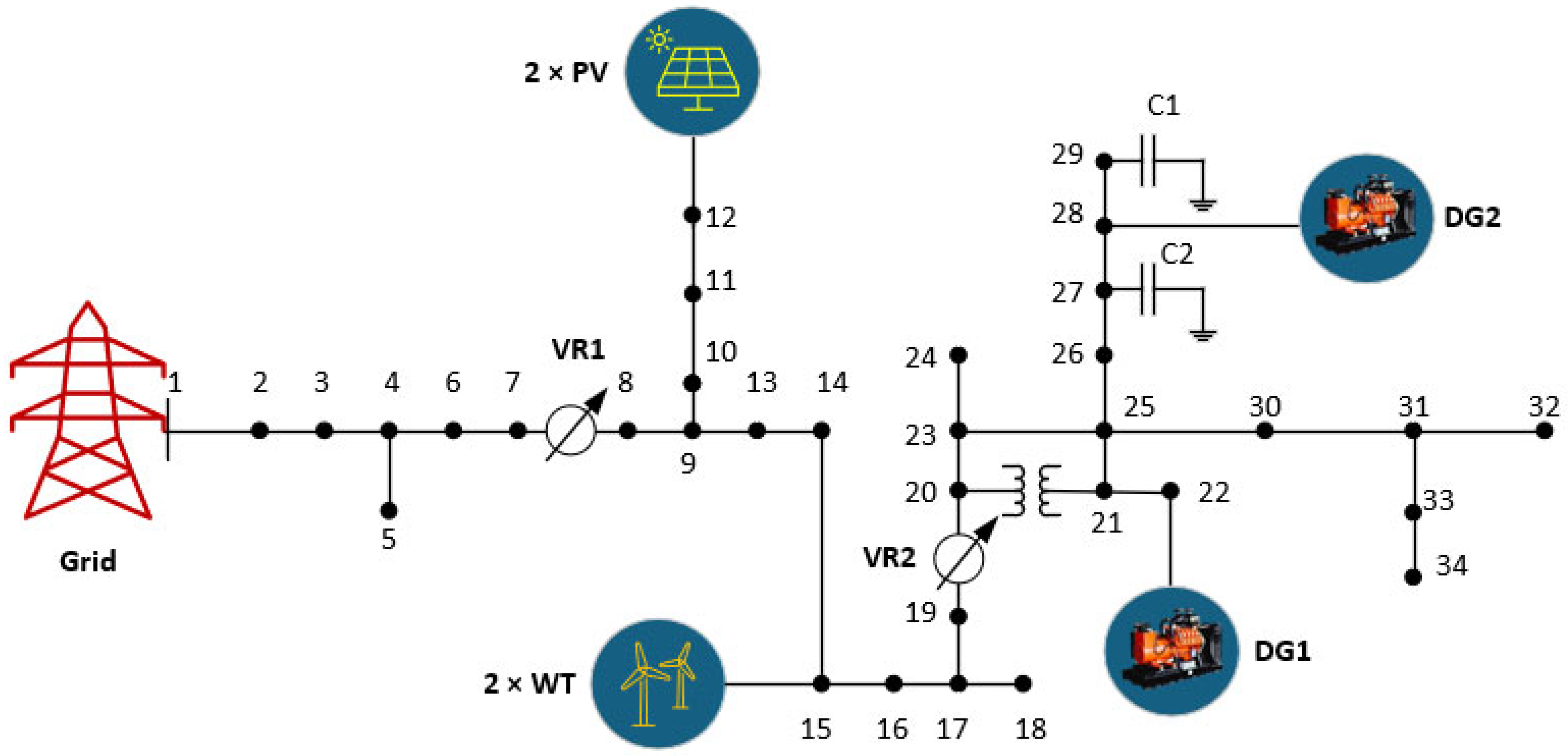
As shown in
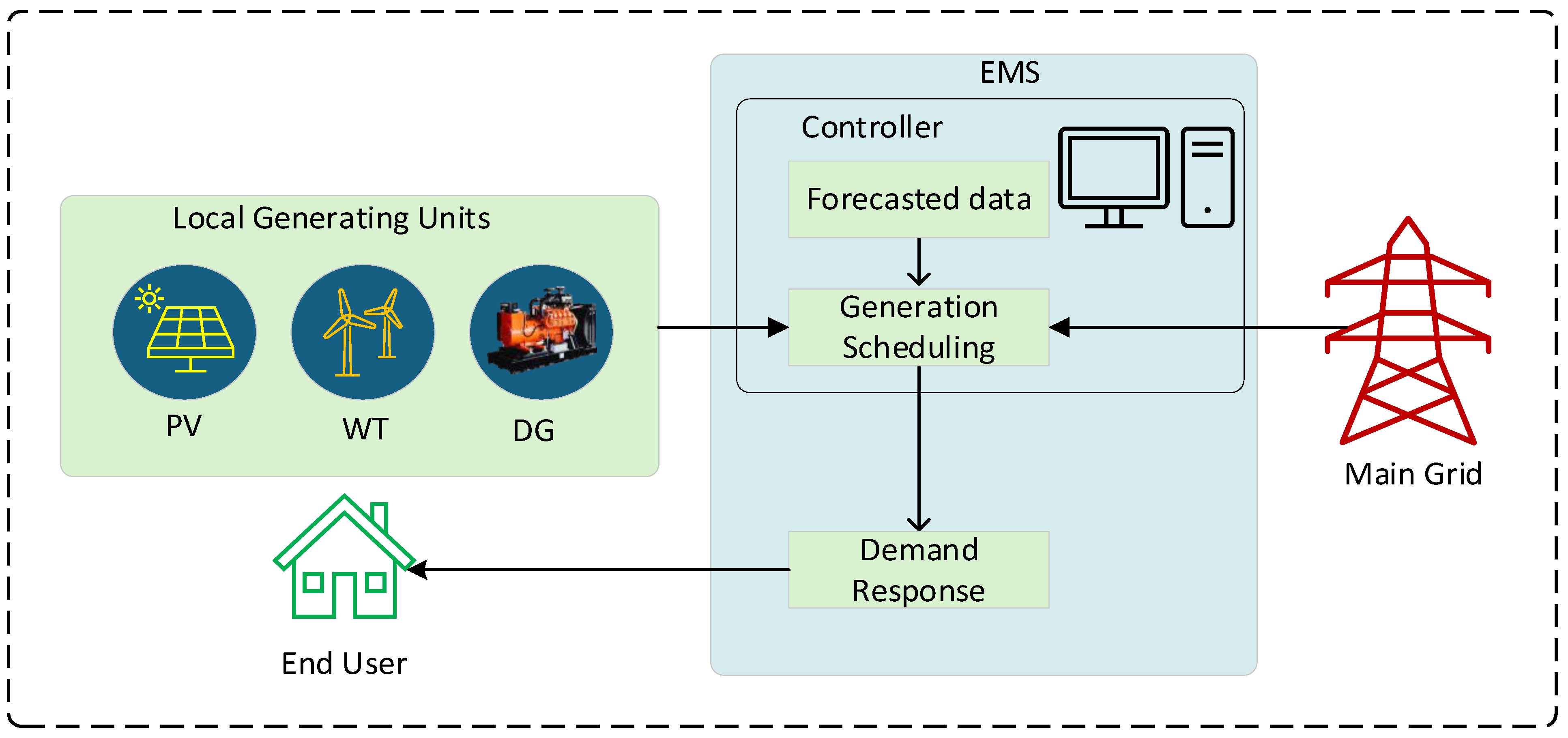
Figure 8, the proposed strategy is tested in a microgrid that is connected to distributed energy resources (DERs) [
2]. These DERs are two diesel generators (DGs), two WTs, and two PV systems. The system serves as a comprehensive model atmosphere for evaluating the performance of the decentralized energy management approach.
Consequently, Buses 22 and 28 will connect the two DG units. Each possesses a distinct cost function, as outlined in
Table 1. The operational limits of diesel generators for power supply range from a minimum output of 30 MW to 33 MW and a maximum output of 125 MVA to 143 MVA per unit. The operational cost functions of the diesel generators within the system are defined by quadratic cost coefficients. The quadratic cost functions for the DGs are characterized by coefficients
a = [0.00043, 0.000394] USD/kWh
2 and
b = [21.6, 20.81] USD/kWh. The coefficients encompass the fuel and maintenance costs associated with diesel generators, incorporating both variable and fixed expenses.
The constraints reflect the actual limitations and operational capacities of distributed generation units within a microgrid. On Bus 15, two wind turbines, each with a rated power of 200 kW, contribute renewable energy to the system. The cost coefficient for wind power generation is 0.1095 USD/kWh, identical to that of the two photovoltaic systems, each with a capacity of 200 kW, located at Bus 12, which also stands at 0.1095 USD/kWh. This indicates comparable economic viability for these renewable energy sources. The microgrid interfaces with the main grid at Bus 1, enabling the importation of power during periods of inadequate local generation. TOU pricing, which varies between peak and off-peak hours, determines the expense associated with importing electricity from the grid. We set the grid power values during peak hours at 0.17 USD/kWh from 1:00 p.m. to 7:00 p.m. Conversely, during off-peak hours, from 7:00 p.m. to 1:00 p.m., the cost is 0.076 USD/kWh. The import of microgrids from the grid is constrained, with a minimum import of 0 kW and a maximum limit of 300 kW.
A DR program equips a microgrid to manage peak demand and enhance grid stability. The demand response program incentivizes load reduction during periods of high demand. The cost coefficient is 0.1 USD per kilowatt-hour for the reduction in load.
5.2. Assessment of Forecast Accuracy
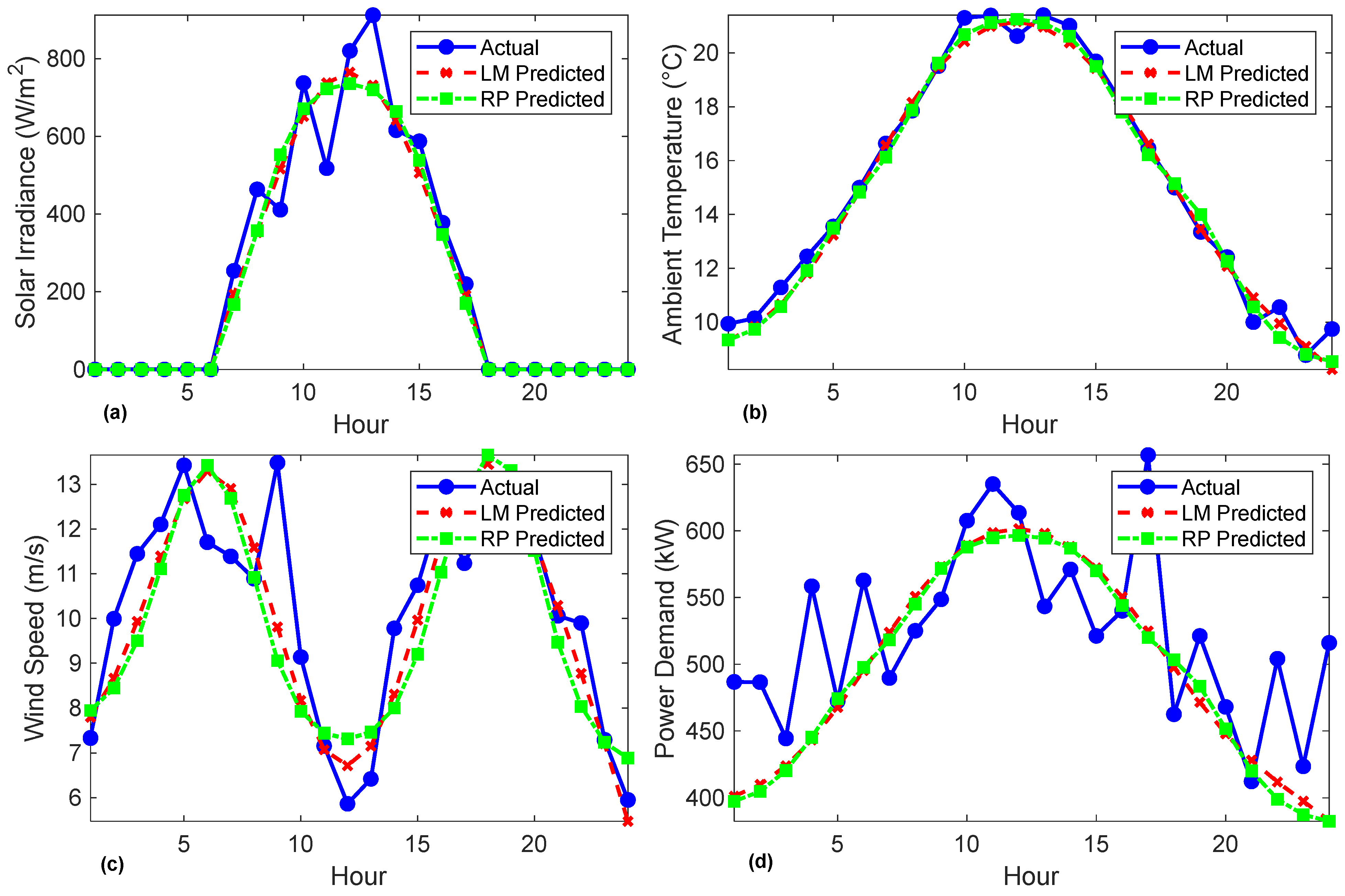
The simulation techniques implemented in a sequential manner displayed the final predictions for solar radiation, temperature, wind speed, and electrical load demand. The two algorithms used were LM and RP. In order to accomplish three consecutive events—training, validation, and testing—the necessary model, MLP-ANN, has been parameterized with variables to be constructed. We have specifically selected a value division ratio of 7:1.5:1.5 based on the dataset. The overall architecture of this model, which executes a total of 600 iterations, consists of the following specifications: two concealed layers, seven input variables, and four output variables. Minimize the training error by employing a minimum-maximum normalization technique for preprocessing.
Figure 9 illustrates the predicted and observed values of solar irradiance (a), temperature (b), wind speed (c), and demand (d) for both LM and RP models. The performances of both models are described.
Table 1 thoroughly compares the evaluation metrics for both algorithms, incorporating a variety of performance metrics such as the CC, RMSE, MAD, and MAPE for each of the predicted variables.
Table 1 demonstrates that both models readily account for relatively high feasible performances in their forecasts of ambient temperature and solar radiation conditions, which themselves maintain a fair CC > 0.97. Conversely, LM will result in reduced RMSE, MAD, and MAPE when it comes to the precise prediction of the variables selected for solar irradiance and power demand. Conversely, the wind speed and load demand variables do not exhibit any significant differences. Consequently, the models report relatively similar results, with higher error metrics obtained in RP than in LM.
These results also illustrate the LM algorithm’s ability to make more accurate predictions of variables such as solar irradiance and power demand, which could be crucial for energy system optimization. Both models produce outcomes that are highly comparable in terms of ambient temperature, as evidenced by their low RMSE and MAD values. This indicates that temperature can be predicted with relative ease in comparison to the other variables.
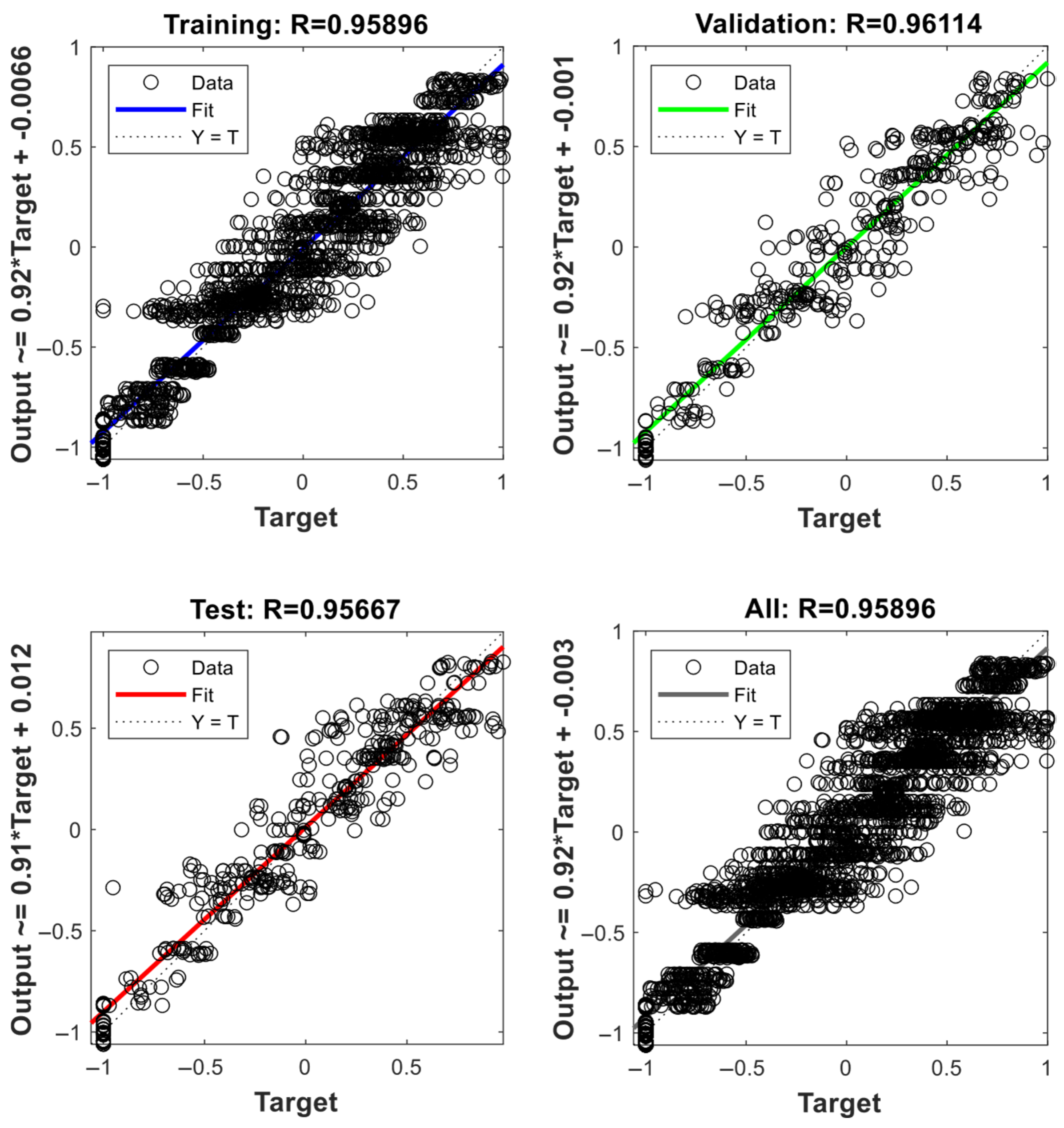
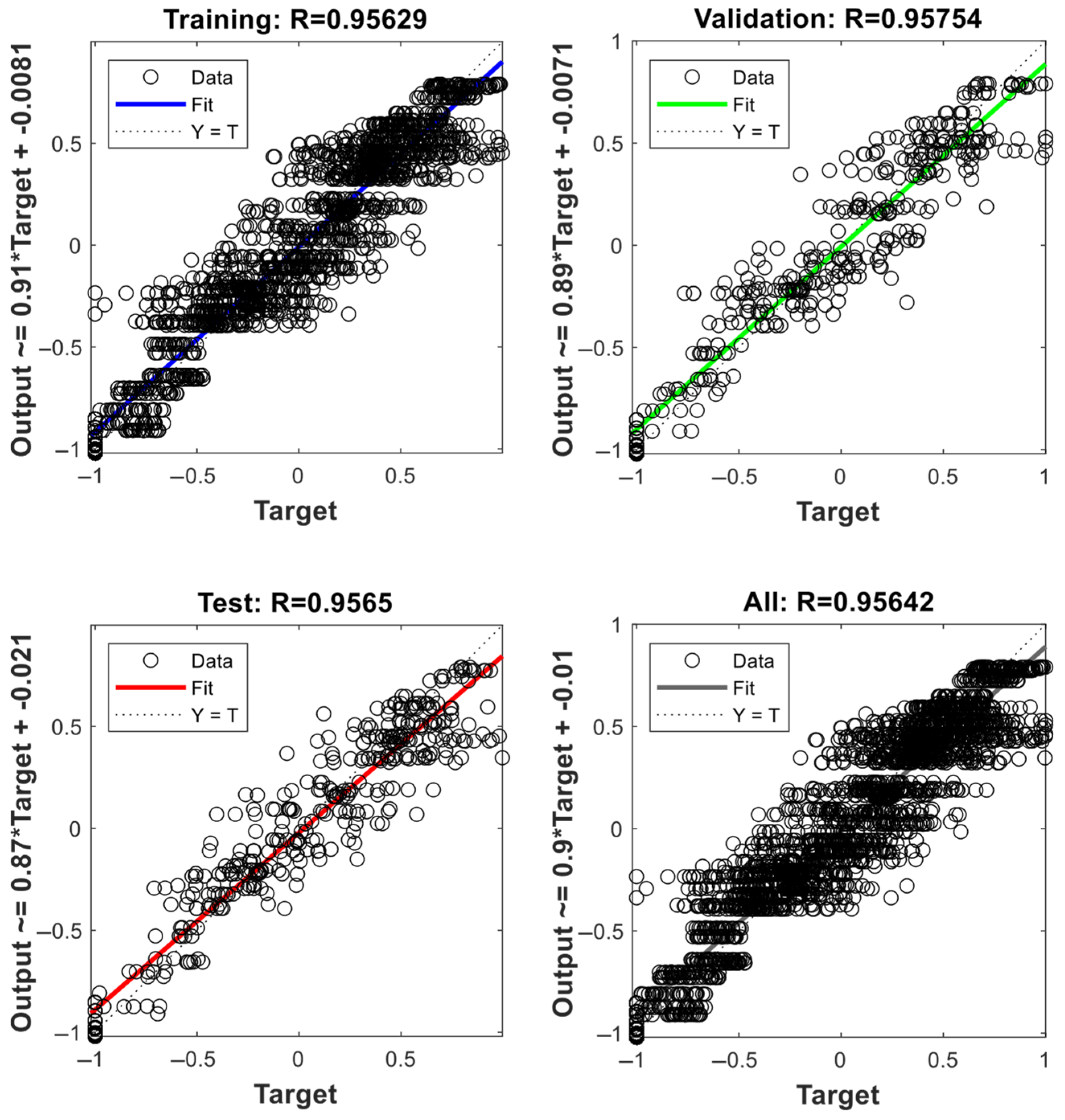
Figure 10 and
Figure 11 illustrate the regression between network outputs and actual values for training, validation, and testing, as well as across all datasets, using the LM and RP algorithms. The regression coefficients obtained from the LM and RP models are 0.95896 and 0.95642, respectively, indicating that the LM has greater explanatory power. Observed data is quite consistent with neural network outputs, as evidenced by the strong correlation between predicted and actual values in both models.
The regression plots truly serve as a visual representation of the algorithms’ capacity to identify the fundamental patterns in the data. The degree to which the predictions align with the actual values in both LM and RP truly demonstrates the accuracy of the model. However, LM outperforms RP in this regard. These findings underscore the robust predictive capabilities of the MLP-ANN, bolstering the efficiency of both algorithms in forecasting solar radiation, temperature, wind speed, and load demand.
5.3. Generation Scheduling and Demand Response Initiative
The simulation results of the optimal generation scheduling and load-shifting demand response system targeted at lowest running costs are presented in this part. Three separate cases—each reflecting a different forecasting method and/or renewable energy source—allow us to assess the suggested approach. We reduce the overall expenses related to fuel consumption, generator operation and maintenance, and power procurement from the main grid by means of the MCO algorithm-based optimization of generating schedule.
The three cases analyzed are as follows:
Case 1: Actual Load and RES
This case analyzes the efficacy of generation scheduling and demand response programs under actual load and RES situations, devoid of any forecasting methodologies. The system leverages real-time data for both load and renewable energy sources during the operation;
Case 2: Forecasted Load and RES with LM
The LM algorithm offers the forecasting for this case, which employs anticipated demand and RES data for system optimization. In this test, we used the LM technique to generate values for upcoming periods, using the predicted output as inputs for optimization;
Case 3: Forecasted Load and RES with RP
This case employs the same forecasting methodology as Case 2 but employs the RP algorithm to predict the load and RES data. The RP-based forecasts are subsequently employed to optimize the generation scheduling and DR program, as in the previous case.
This assesses the effectiveness of the proposed MCO-based optimization strategy in reducing operational costs, considering load management strategies and forecasting techniques. The subsequent findings provide a comprehensive analysis of the operational cost, demand response impact, and microgrid performance of each case.
5.3.1. Results of Case 1
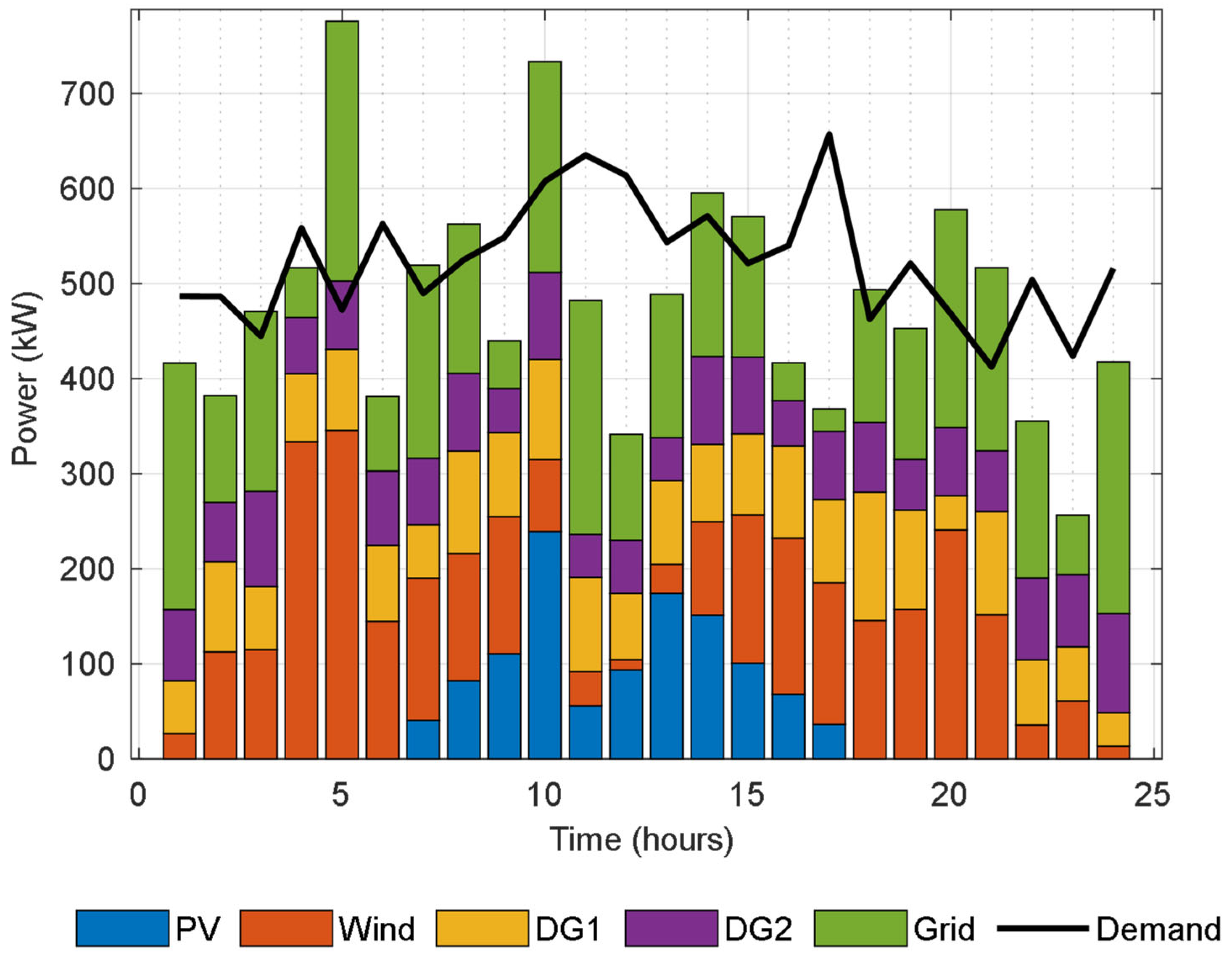
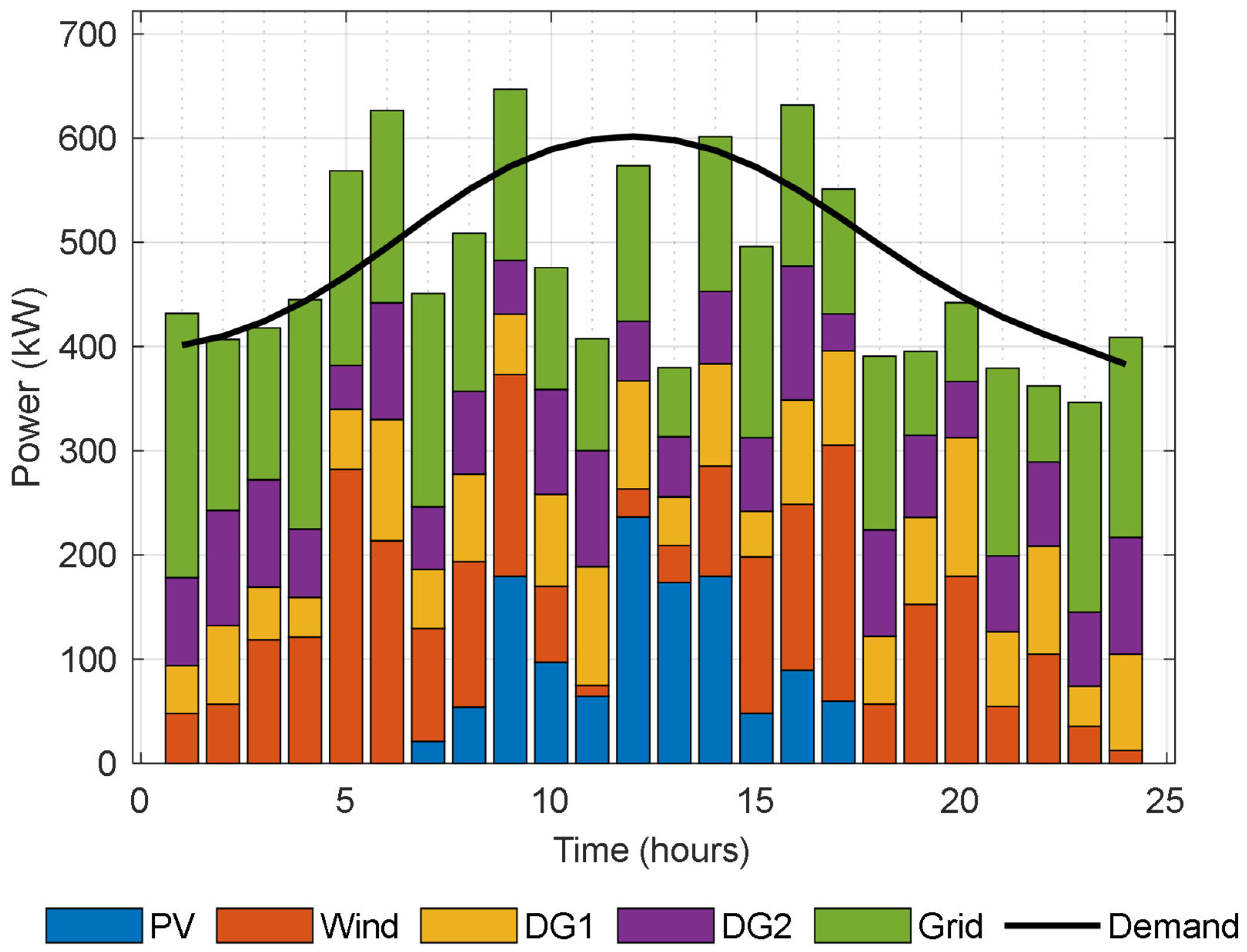
Case 1 presents the optimal generation scheduling for the microgrid using actual load data and the real-time availability of RESs. The contributions of various generation sources, including PV, wind turbines, diesel generators DG1 and DG2, and the main grid over a 24 h period is shown in
Figure 12. As can be seen, the integration of renewable energy sources significantly influenced the scheduling strategy, especially during periods of elevated wind or solar generation. For instance, the reliance on diesel generators and grid power significantly decreased during hours with high wind generation, such as hours 4, 5, and 20. Hour 5 saw a peak in wind generation of 345.53 kW, resulting in a significant reduction in demand from DG1 and DG2. During daylight hours, say, at hour 10, PV generation attained 239.15 kW and hence reduced dependence on grid power. On the other hand, during the hours with the least or no renewable generation, such as 1 and 24, there was a significant reliance on DG1, DG2, and grid power to meet the load demand. During hour 1, when wind and PV generation were absent, the load contributions from major participants DG1, DG2, and the grid were 55.58 kW, 74.84 kW, and 259.26 kW, respectively.
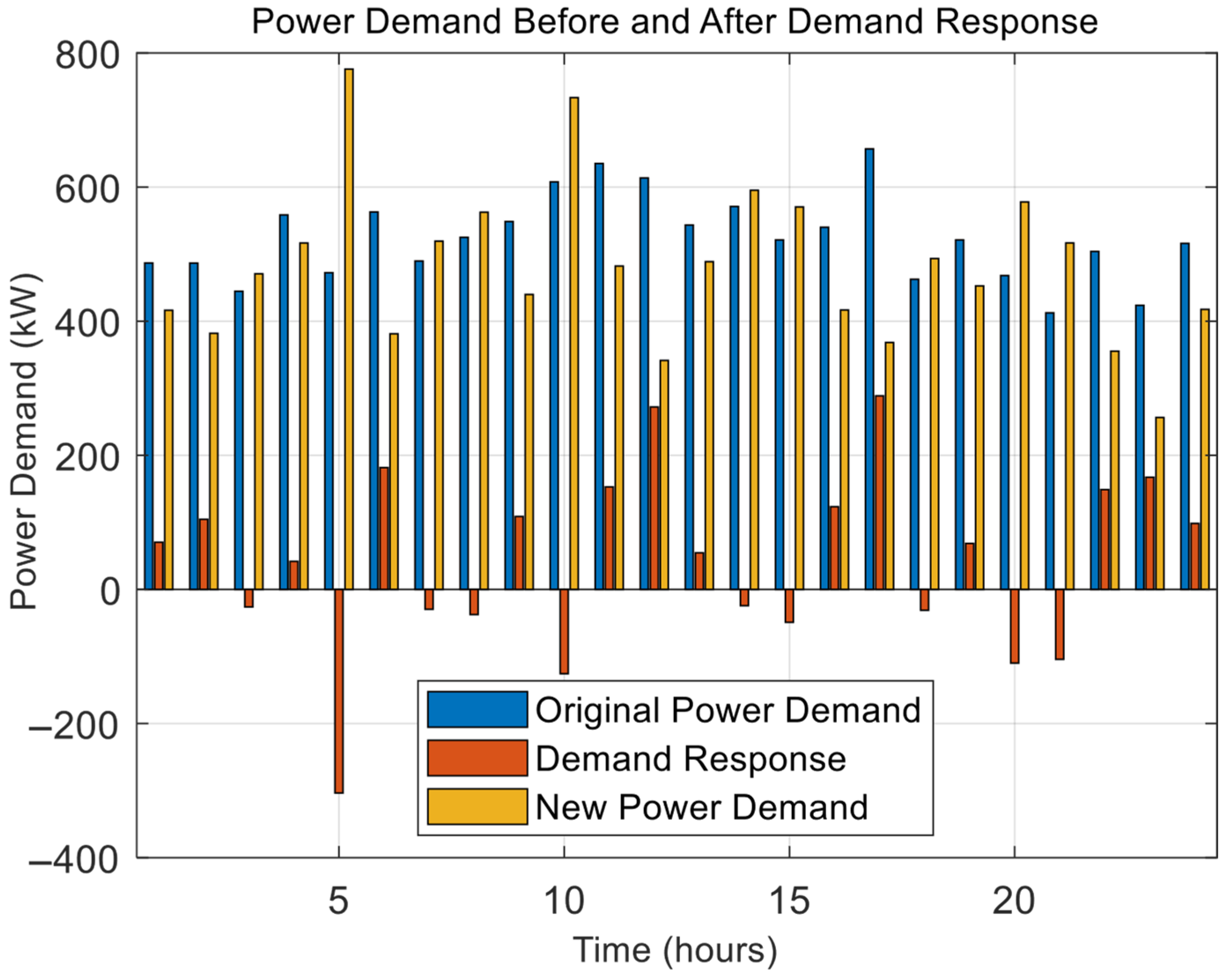
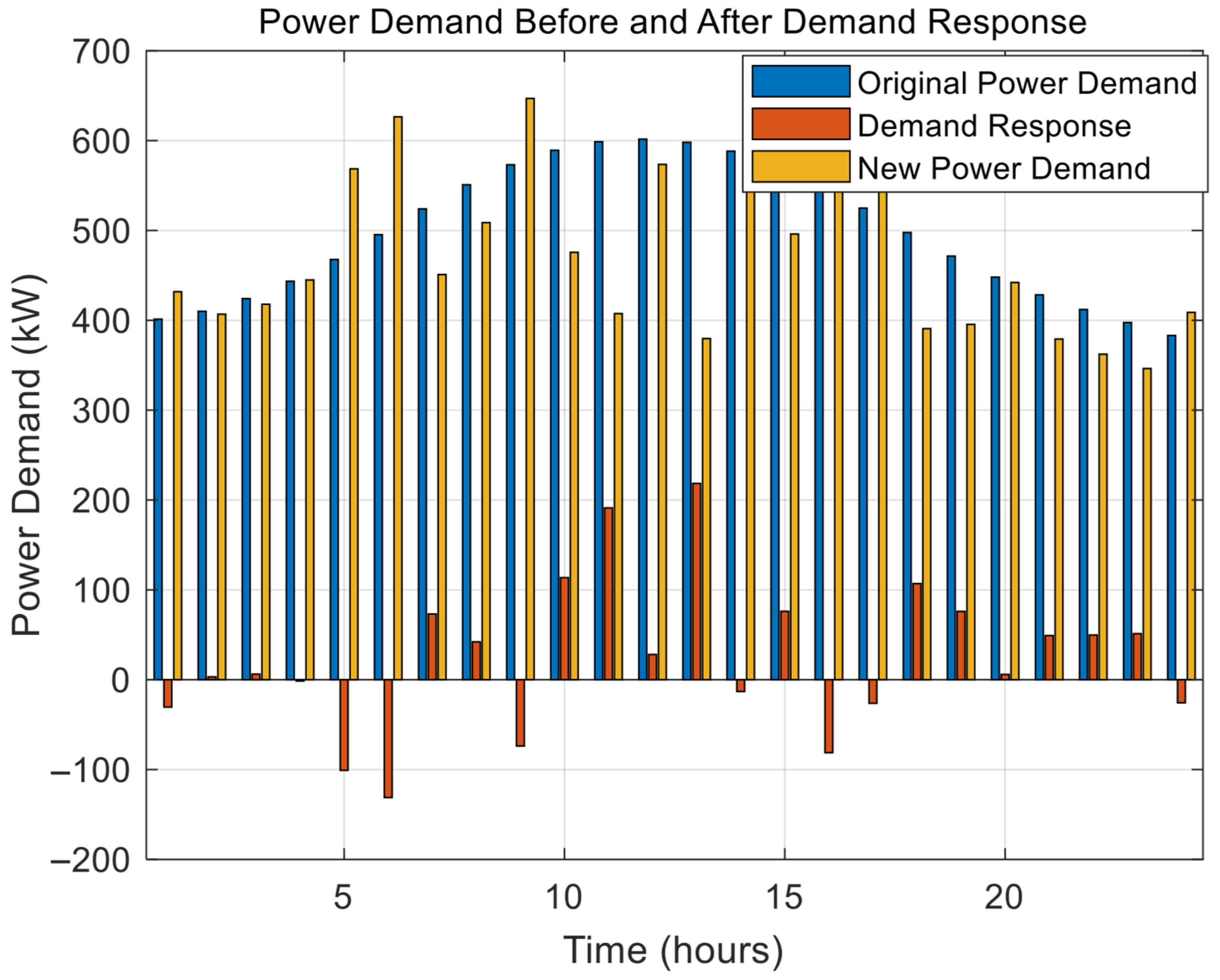
The MCO algorithm will optimize the cost of operation to USD 78,970.35, a significant improvement from USD 110,488.34 without optimization. This reduction has shown the efficiency of the algorithm in the minimization of operational costs by giving a high priority to renewable energy sources and using strategic management for non-renewable generation. We further optimized this by incorporating DR strategies and shifting the load at specific times to optimize resource utilization as indicated in
Figure 13. For example, we reallocated 472.34 kW at hour 5 to shift 303.66 kW from that hour to 775.99 kW. At hour 12, the DR strategy shifted 272.11 kW from its original 613.60 kW to a lower 341.50 kW. Overall, the results highlight the potential of the MCO algorithm in handling the variability of renewable energy sources, optimizing operational costs, and leveraging demand response strategies to further improve performance and sustainability of microgrids.
5.3.2. Results of Case 2
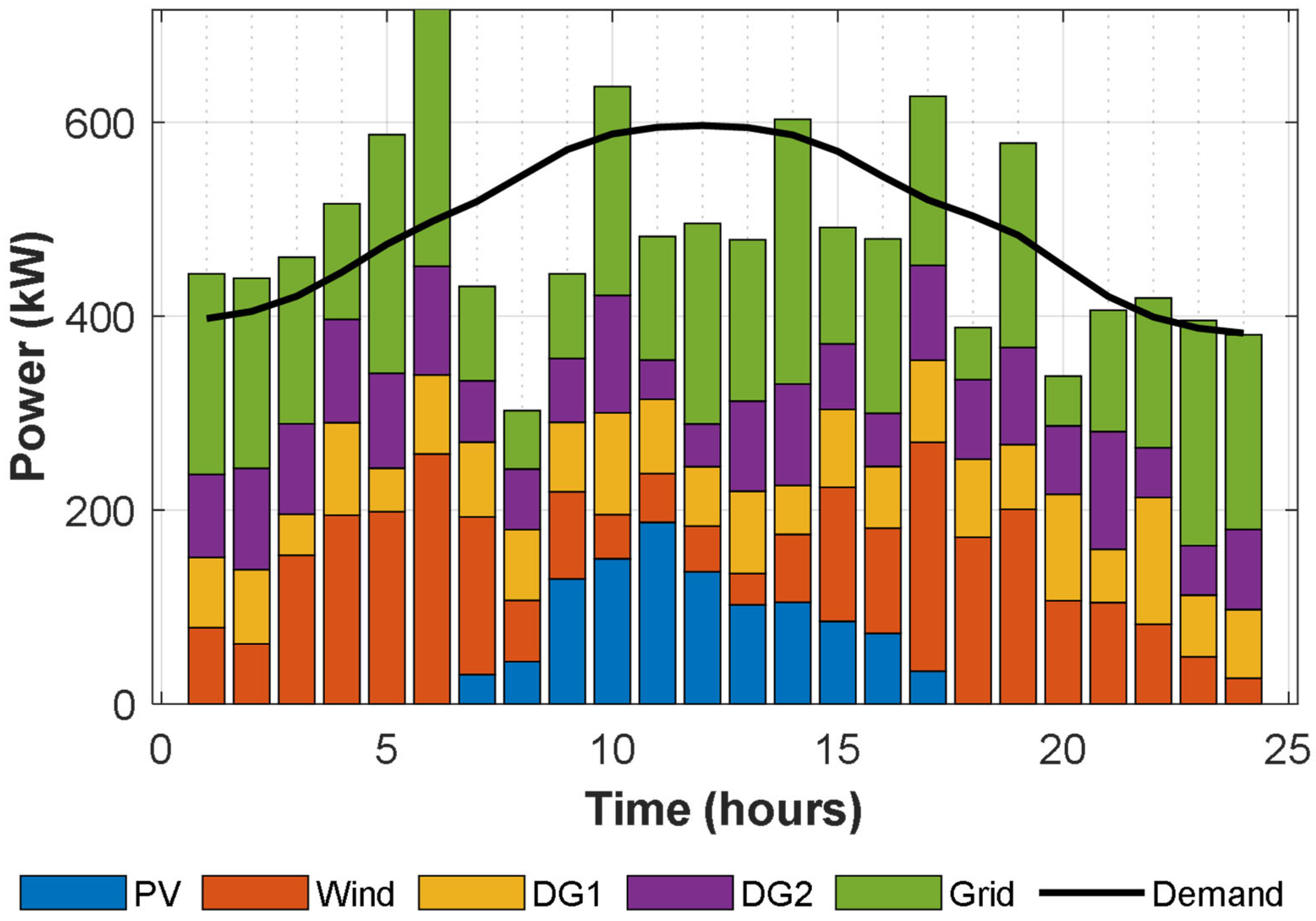
The LM algorithm generates forecasted load and RES data to optimize the generation scheduling of the microgrid in Case 2. Predictive methods delivered highly precise insights for optimization, enabling efficient resource distribution and adaptability in response to the inherent fluctuations in sustainable energy sources. The findings emphasize the impact of various generation sources, including photovoltaic systems, wind turbines, diesel generators (DG1 and DG2), and the primary grid over a 24 h timeframe as shown in
Figure 14.
Enhancements related to the fluctuations in the inputs from renewable sources, a crucial factor in the formulation of scheduling approaches, have enabled efficient management. Indeed, during times of increased availability, particularly noticeable at hour 9, the peak output from wind sources soared to 193.58 kW, complemented by a substantial contribution of 179.53 kW from photovoltaic systems. As a result, the resources highlighted played a crucial role in minimizing reliance on dispatchable units and grid imports. The dispatchable units, DG1 and DG2, produce only 57.99 kW and 51.64 kW, respectively, and the grid can only sell 164.17 kW. Hour 14 saw the peak of RES contributions, with PV producing 179.53 kW and wind generating 105.80 kW. Consequently, we capped the outputs for DG1 and DG2 at 98.03 kW and 69.52 kW, respectively, and minimized the import from the grid to 148.53 kW. The results demonstrate that the system can prioritize sustainable utilization, reduce operational costs, and improve scheduling efficiency.
During times of diminished generation from sustainable sources, the model responded by enhancing its dependence on traditional energy sources and grid imports to satisfy the demand for power. During the first hour, with no photovoltaic generation and a slight wind input of 47.77 kW, DG1 and DG2 provided 45.91 kW and 84.50 kW, respectively, while the grid fulfilled the remaining demand with 253.63 kW. During hour 23, the wind generation decreased to 35.58 kW, with no PV availability. This situation necessitated increased outputs from DG1 and DG2, approximately 38.57 kW and 71.00 kW, respectively, along with grid imports of 201.15 kW. These examples illustrate the model’s ability to adaptively redistribute resources to guarantee optimal load satisfaction in response to changing circumstances.
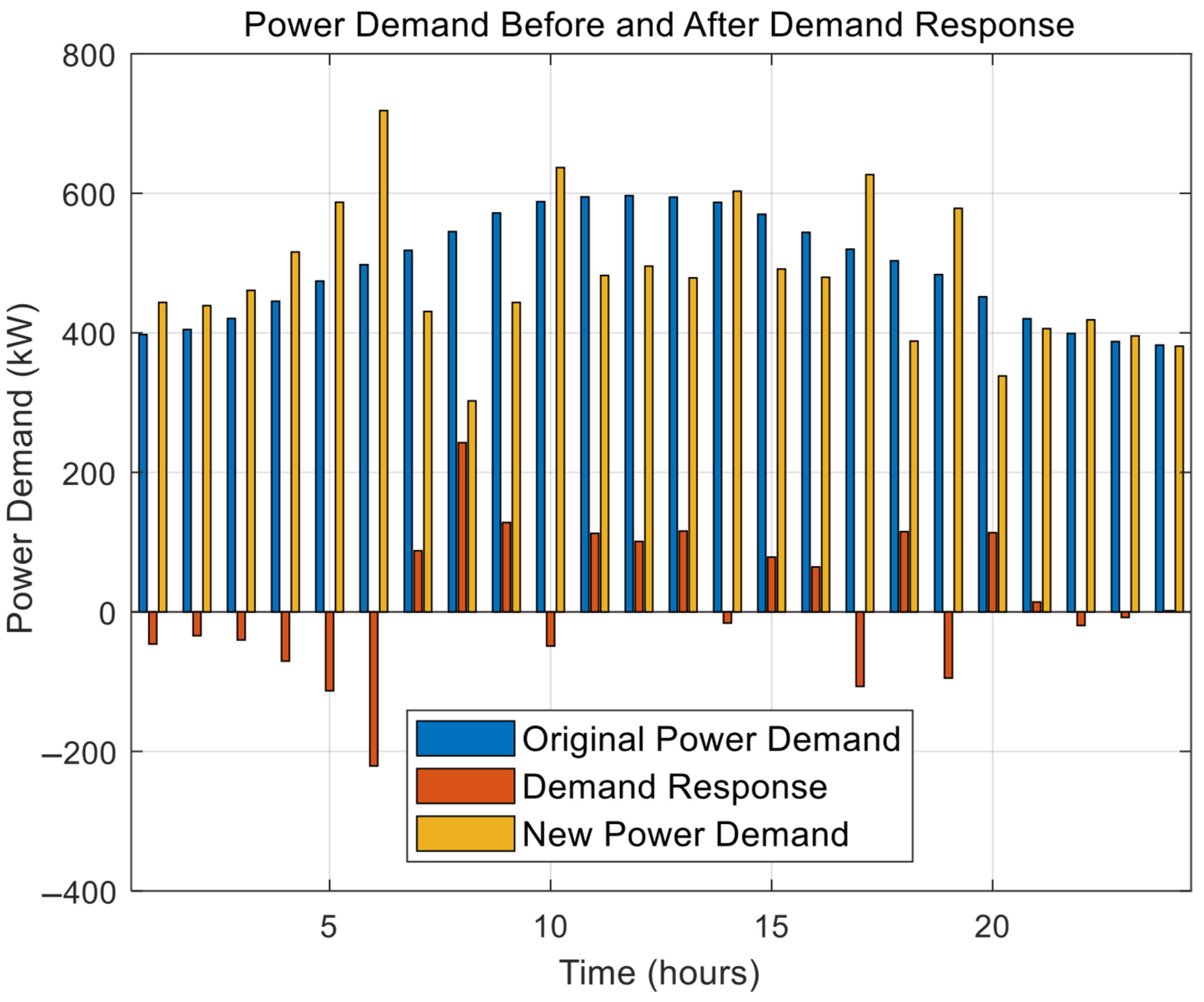
As illustrated in
Figure 15, the incorporation of demand response strategies enhanced the system’s performance by adjusting the loads according to operational conditions. For example, a decrease of 131.18 kW in load during hour 6 alleviated pressure on the system, while an increase of 191.22 kW during hour 11 promoted more effective use of excess clean energy production. This approach will synchronize the load profile with generation availability, leading to a decrease in dependence on grid power and fossil fuels while enhancing overall efficiency.
This resulted in significant reductions in the unoptimized operating expenses, totaling USD 110,488.34. Through optimization, LM-based forecasting and demand response have significantly boosted operational efficiency, resulting in substantial cost reductions and enhanced management of resources. This result shows how important predictive modeling and resource optimization are for dealing with the unpredictable nature of clean energy sources. This improves the microgrid’s operational reliability, long-term viability, and cost-effectiveness.
5.3.3. Results of Case 3
Case 3 illustrates the generation scheduling optimization problem by using forecasted demand and RES predicted by the Resilient Backpropagation algorithm. Using these RP-based forecasts as input provides a reliable and effective foundation for the efficient scheduling of resources, seamlessly integrating demand response. This has demonstrated that the system dynamically adjusts to fluctuations in renewable energy availability, utilizing dispatchable resources in a manner that is both economical and stable.
Throughout the 24 h period, as shown in
Figure 16, the optimized scheduling guarantees the most efficient utilization of renewable energy sources, particularly wind and photovoltaic systems, during peak generation hours. For instance, it lessens dependence on grid power and dispatchable units during the peak hour of wind generation, which is 257.83 kW at hour 6. Therefore, we assume that DG1 and DG2 produce medium-level outputs of 81.48 kW and 112.17 kW, respectively, and achieve load balancing by importing 267.09 kW from the grid. Consequently, this diagram endeavors to illustrate the potential for resource utilization that is more efficient because of the increased availability of renewable energy sources. The 236.01 kW increase in wind generation at hour 17 further reduces the dependency on the grid to 174.36 kW. The sharing of dispatchable units is also effective, with 84.67 kW from DG1 and 97.90 kW from DG2. The system’s ability to adapt to the fluctuations in renewable energy sources guarantees economical and dependable operation, particularly when renewable energy is abundant.
Simultaneously, PV generation has the potential to significantly reduce grid dependence, particularly during midday. The combined shares reduce grid imports to 127.49 kW and DG1/DG2 feed at a reduced amount of 76.54 kW and 40.50 kW, respectively, at hour 11, when they achieve its peak value of 187.35 kW with the help of 50.31 kW from wind output. This guarantees a decrease in operating costs and reliance on nonrenewable sources by optimizing the utilization of variable renewable resources.
When renewable energy generation is insufficient, the system responds by increasing its reliance on dispatchable units and grid imports. For instance, at hour 1, there is no PV generation and a restricted wind output of 78.69 kW. DG1 and DG2 supply 72.54 kW and 85.49 kW, respectively, while grid imports increase to 206.89 kW. Similarly, at hour 23, the wind generation declines to 48.66 kW, while there is no PV output. In addition to 232.36 kW grid imports, the system has now increased DG1 and DG2 to 63.60 kW and 50.91 kW, respectively. The system consistently implements these modifications to meet demand, even during periods of low renewable availability.
The DR program, as shown in
Figure 17, improves the system’s performance by adjusting the load in accordance with operational conditions. For instance, the program reduces operational costs by reducing peak demand and adjusting the load profile to match generation availability, thereby reducing reliance on grid imports and dispatchable units. In this manner, incorporating DR will ensure the system remains cost-effective even in the face of adversity.
As a result, Case 3 optimizes its operating cost, demonstrating the effectiveness of RP-based forecasting and integrated DR strategies. Consequently, the operating cost significantly decreases compared to unoptimized scenarios. These results underscore the system’s resilience in managing the variability of renewable energy sources, ensuring reliable operation and minimal costs while optimizing the efficient integration of renewable energy sources.
5.3.4. Total Power Generation in the Case Studies
This section contrasts the total power generation of the three case studies, emphasizing the interaction between grid imports, local generation, and the impact of the demand response program. The findings offer a comprehensive understanding of the impact of the optimization strategies in each case on the utilization of local resources and the overall power generation.
In Case 1, as represented in
Table 2, the maximum generation and DR contribution are presented as follows: Local generation is 7850.77 kW, and the total DR is 1041.68 kW. In this instance, the grid imports amount to 3680.00 kW, which suggests a significant reliance on local generation and DR programs to satisfy the demand. As the local generation decreased to 7653.86 kW, Case 2 indicates a minor increase in grid importation to 3690.55 kW. Additionally, the DR total decreased to 607.11 kW. Therefore, despite nearly identical grid importation, it is reasonable to infer a diminished contribution from the DR program compared to Case 1. Case 2’s optimization strategy is to blame for this. Case 3 further increases utility imports to 3943.65 kW, while local generation marginally decreases to 7598.34 kW. The reduction in the total DR in Case 3 to 355.97 kW further demonstrates the reduced role of demand response in load balancing. This trend is consistent with the other cases.
Throughout the three cases, the fluctuations in grid import, local generation, and the DR contribution demonstrate how each scenario has responded to varying levels of renewable energy, a distinct approach to load forecasting, and, as a result, the effectiveness of the demand response strategy in optimizing the cost of total power generation.
5.3.5. Analysis of Operational Costs
The operational costs of generation sources are assessed over a 24 h period in four scenarios: without optimization (wo/optimization) and three optimization cases (Case 1, Case 2, and Case 3). The results of
Table 3 illustrate the significant influence of optimization strategies on the reduction in costs and the enhancement of efficiency.
In Case 2, we used the LM algorithm to obtain the forecasted load and RES data, which led to an operational cost of USD 80,909.51. This represents a reduction of approximately 26.8% from the baseline of USD 110,488.34. Case 3 employed the RP algorithm to forecast load and renewable sources data, leading to a reduction of approximately 26.3% in the total cost of USD 81,421.78. These findings demonstrate the extent to which sophisticated forecasting algorithms can optimize generation scheduling and reduce uncertainties.
Table 4 emphasizes the competitiveness of Cases 2 and 3 by contrasting the results with the existing literature. For instance, in [
34], the authors achieved a 15.6% cost savings by considering the uncertainty in PVs’ demand response and energy storage. In [
43], the authors achieved a 5% reduction by employing load-shifting strategies without resolving system uncertainties. In contrast, Case 2 and Case 3 have accomplished more substantial reductions by integrating uncertainty modeling with LM and RP algorithms, respectively. Similarly, Case 2’s cost savings of 26.8% and Case 3’s cost savings of 26.3% surpasses the 16% reduction reported in the study, which optimized a network–load interaction framework to capture pricing uncertainty. Additionally, the model incorporated wind uncertainty and demand response, resulting in savings of 27%. These results are consistent with the performance of Cases 2 and 3 under the more comprehensive modeling of uncertainty.
In Cases 2 and 3, the operationalized proposed approach aligns with the forecasting results of the ARIMA model, leading to a 22% cost reduction. Nevertheless, the LM-based and RP algorithms that were implemented in Cases 2 and 3 demonstrated a greater ability to adjust to system uncertainties in order to achieve optimal conditions for the local generation scheduling applications while simultaneously balancing demand-side management algorithms. This behavior suggests that the optimization modeling methodology is effective in mitigating uncertainties related to renewable energy use and load preconditioning.
The test system (
Figure 8) validated the EMS’s efficacy, with MCO achieving a 26.8% cost reduction (
Table 3) and DR programs enhancing load flexibility (
Figure 13,
Figure 15 and
Figure 17). Case 2 (LM forecasting) showed superior accuracy, underscoring the importance of precise predictions. The comparison study showed that using advanced forecasting algorithms along with demand response strategies can effectively lower operational costs, even when there are a lot of unknowns. The substantial cost reductions that Case 2 and Case 3 generated among all the optimized cases demonstrated the effectiveness of utilizing predictive algorithms for energy management in modern power systems.
5.4. Comparison with Other Algorithms
The demand response program’s implementation within the microgrid led to substantial reductions in peak load and enhanced load balancing. This adaptability enabled the microgrid to enhance its overall resilience and stability by dynamically adapting to fluctuations in demand and generation.
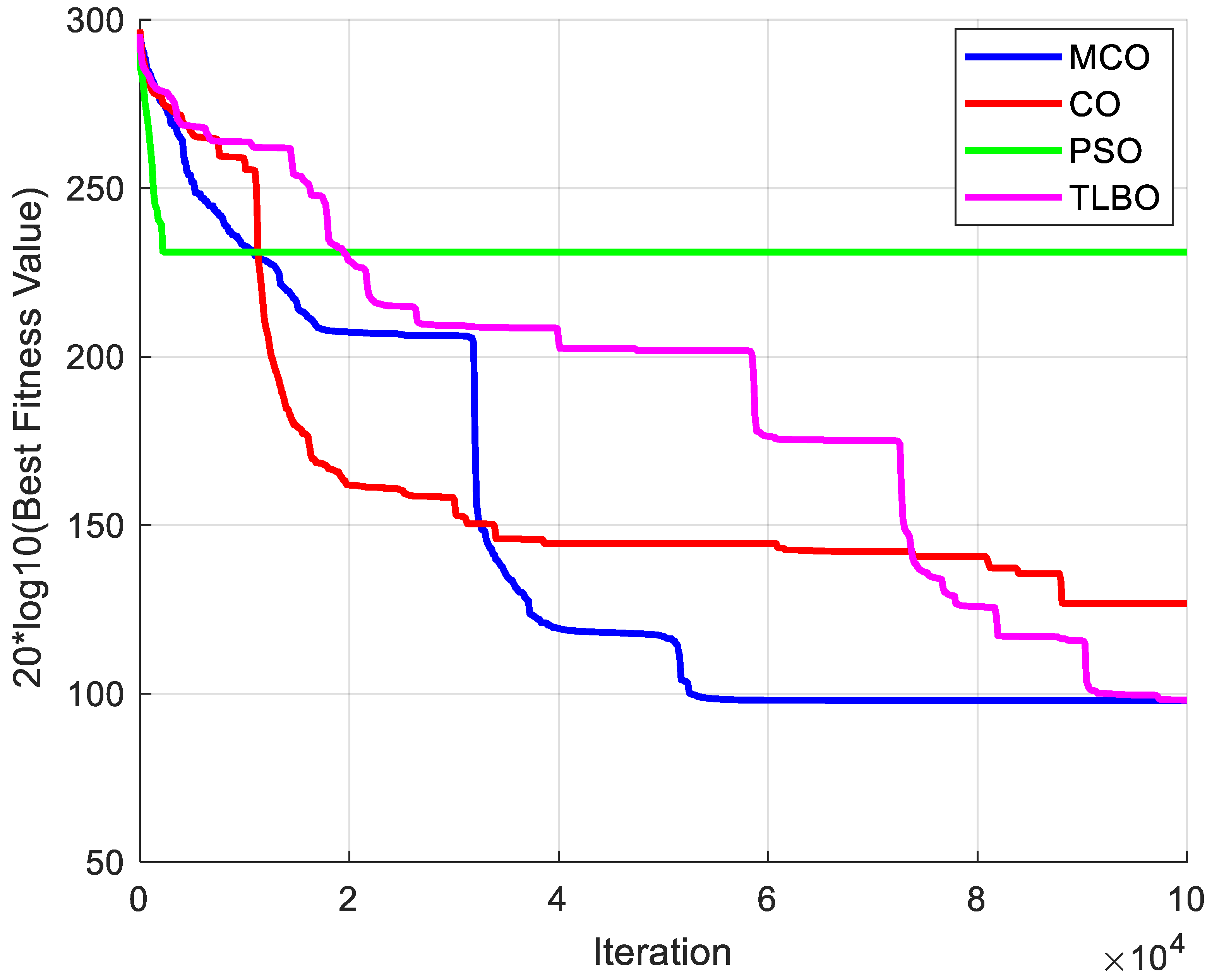
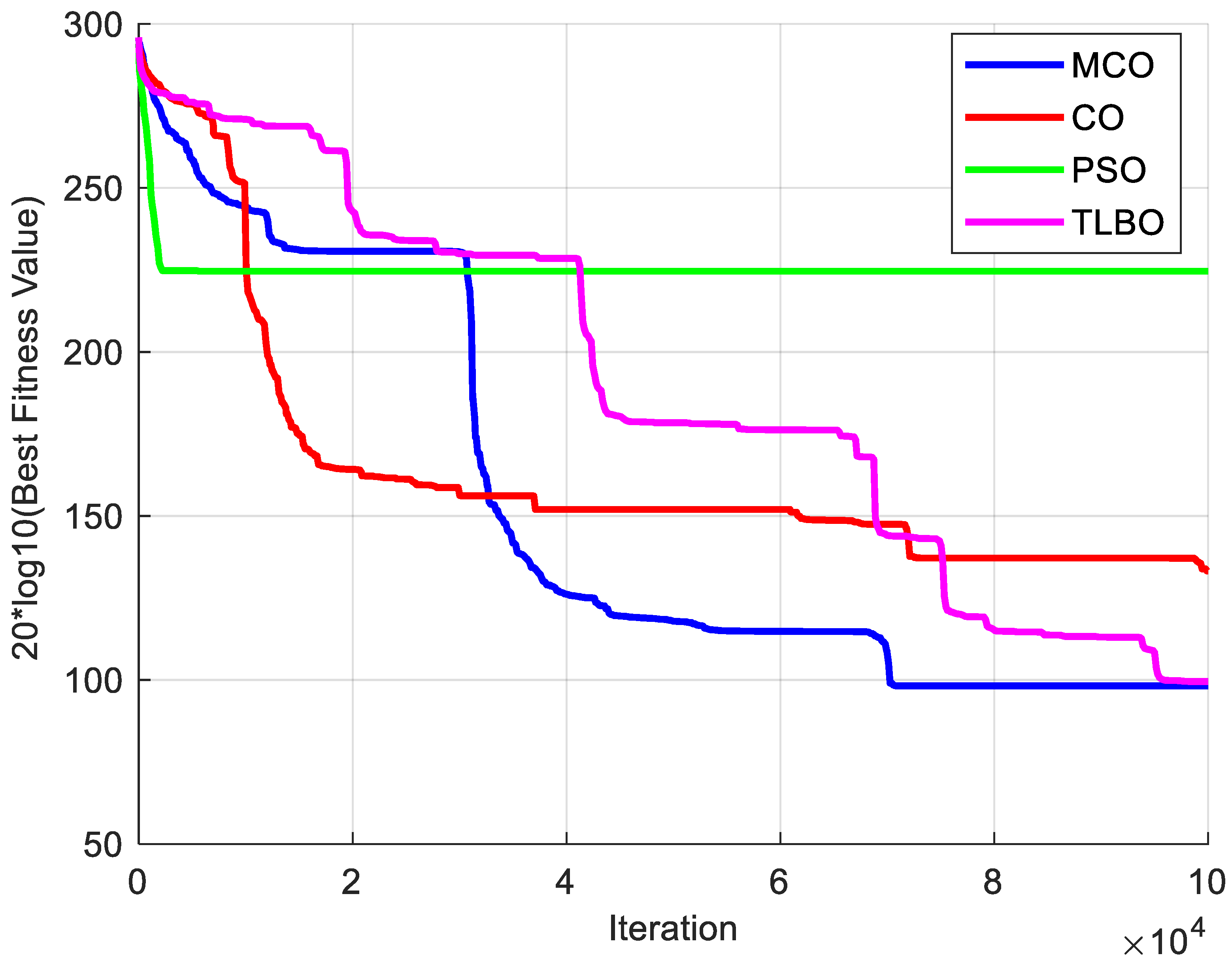
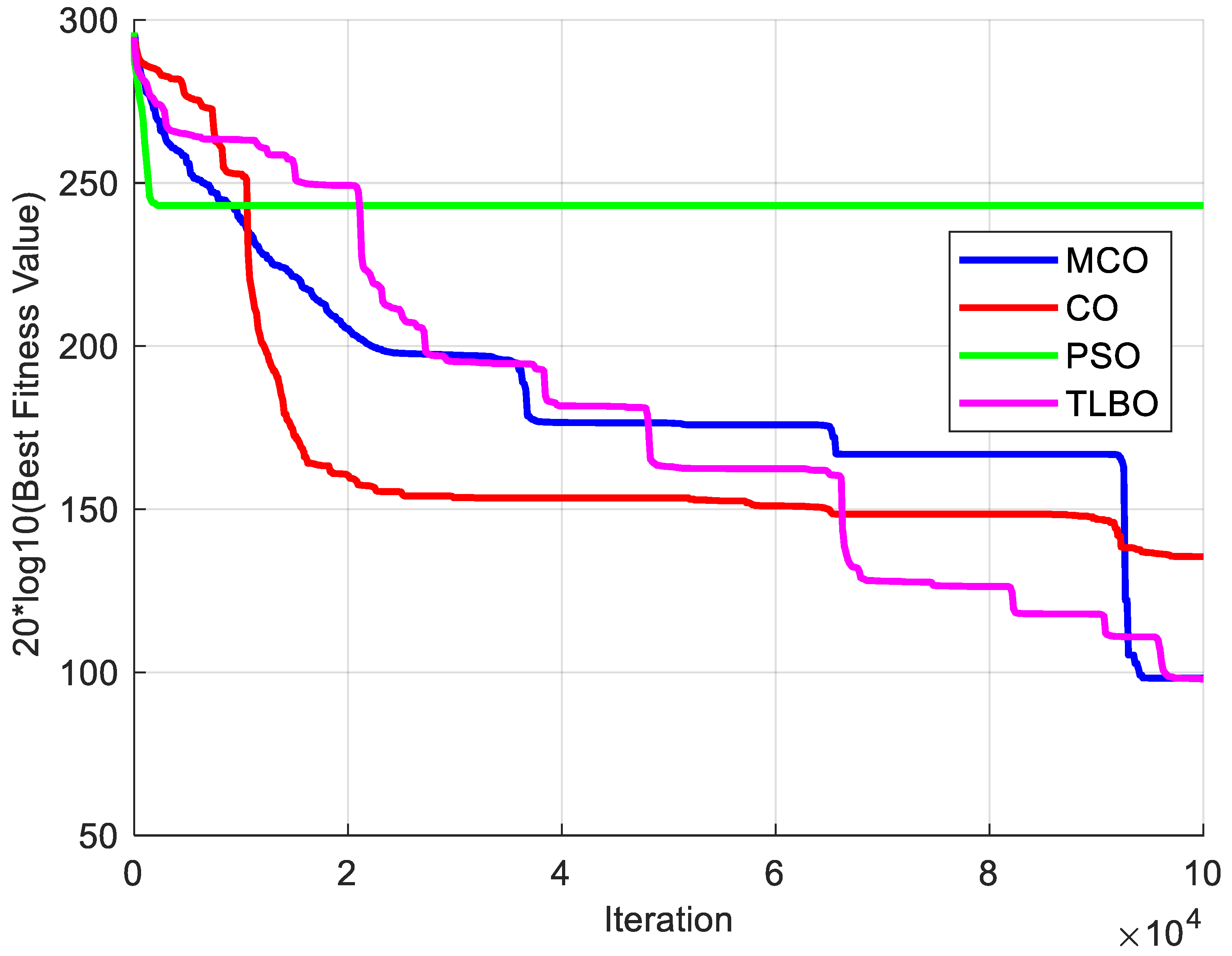
The proposed system has been evaluated in comparison to four well-known optimization algorithms: MCO, CO, PSO, and TLBO. Each algorithm was executed once, with a population size of 10, a maximal number of iterations of 100,000, and a total of 25 trials. Key performance trends are emphasized within the summary of the results from three distinct cases as represented in
Table 5.
In Case 1, MCO demonstrated its efficiency in cost minimization by generating the minimum and mean values of operation costs for all scenarios. In comparison to other algorithms, the SD value of MCO is also exceedingly small, which demonstrates that the convergence of MCO is more consistent. In contrast, the other three algorithms, namely CO, PSO, and TLBO, exhibit a significantly higher operational cost and a greater degree of variability in their results. Their standard deviations are significantly greater than those of MCO. MCO maintained its optimal performance in Case 2. The average costs of CO and TLBO were higher, resulting in poorer operating practices, as well as higher standard deviations. PSO exhibited an even greater degree of variability; its maximal operational cost and SD were all higher than those of other algorithms. The robustness of the system in managing uncertainty was underscored by the smaller mean and SD of MCO. MCO once again surpassed the other algorithms compared in Case 3 by providing the minimum average operational cost with the least standard deviation. This implies that it not only ensures a superior performance in terms of cost, but also reliable results after repeated trials. The PSO and TLBO have led to a relatively higher cost with greater variability, particularly in terms of maximal cost and standard deviation.
Figure 18,
Figure 19 and
Figure 20 illustrate the convergence trajectories of the algorithms for the optimal run over 25 trials. The convergence behavior of each algorithm during the optimization process is illustrated in these diagrams. PSO has consistently converged to suboptimal solutions and has converged prematurely in all trials. It was unable to evade local optima and was found to be the least efficient algorithm in terms of convergence efficiency. Conversely, CO achieved a higher convergence rate during the initial iterations than TLBO and MCO. Nevertheless, CO was unable to investigate superior solutions during subsequent optimization iterations, as it converged to a local optimum. In both Cases 1 and 2, it is evident that MCO converges more rapidly, and TLBO was outperformed by avoiding local optima. In Case 3, both TLBO and MCO exhibited a comparable convergence trend; however, MCO achieved a marginally faster convergence rate.
In general, the efficacy of MCO has been superior in all three cases. MCO is more stable and efficient, as evidenced by the minor deviations from the minimum operational cost in all three cases. This conclusion can also be drawn from the convergence behavior illustrated in the subsequent figures, which demonstrate that MCO has superior convergence. Specifically, it identifies the optimal solution with greater speed and reliability than other algorithms. Its successful operational management was significantly influenced by the integration of demand response with an optimal scheduling approach, as well as modifications to the MCO algorithm. The balance between exploration and exploitation is improved in the improved MCO algorithm by simplifying the randomization and turning factors, H value, and presenting an improved search strategy that utilizes the leader’s position. Consequently, MCO possessed a robust and adaptive search process that was more cost-effective and stable than the other algorithms.
5.5. Robustness Analysis Under Operational Uncertainties
To strongly evaluate the suggested MCO algorithm under realistic uncertainties, an extensive sensitivity study was conducted, considering large fluctuations in both renewable generation and loading demands. Detailed test scenarios were carefully defined to ensure that abnormal operating situations that can be experienced by microgrids were effectively addressed, including excess renewable generation, energy shortages, and volatile fluctuations.
The test cases included a variation of about ±30% in output produced by photovoltaics and wind farms, plus associated variations in demand, giving three specific test cases: high renewable generation and low demand (HRLD), low renewable generation and high demand (LRHD), and anomalous volatility in both factors (VF). These cases were tested using the same 600 kW test microgrid described in
Section 5.1, with a data resolution period of 1 min over a 30-day test period.
Table 6 shows that the MCO algorithm was considerably effective in all experimental scenarios. Under the less complex HRLD scenario, the algorithm effectively minimized operating costs to USD 78,420, which is a reduction of 26.1% compared to traditional methods. Under the larger-scale LRHD scenario, the MCO algorithm limited cost rises to only 4.2% compared to conventional methods, while achieving a reduction of 24.3% compared to baseline methods. Under the VF scenario, which assumes realistic grid scenarios, moderate effectiveness was realized, and the MCO algorithm significantly exceeded all baseline algorithms.
Notably, the energy management system based on MCO fully preserved all operating constraints in the testing period, involving power balance requirements and generation limits. This superior constraint satisfaction is in sharp contrast to the performance exercised using PSO (12 violations), GA (19 violations), and TLBO (8 violations) under identical testing scenarios. The capable performance can be related to the algorithm’s strategy selection dynamic mechanism as well as its adaptive balance between exploration and exploitation, which promote effective search navigation in the solution space, even in the presence of substantial parameter variations.
The results offer significant validation for the practicability of the proposed methodology, particularly for applications related to microgrids involving high penetration of renewable energies and variable demand.
The robustness analysis supports the claim that the MCO algorithm can preserve its performance advantage, even under significant uncertainties present in the system. This attribute makes it particularly suitable for real-world microgrid applications, where prediction errors and demand variability are unavoidable. The outcomes agree with the existing literature on managing uncertainties in renewable systems, while showcasing improved performance properties over conventional methods presented in [
19,
20]. The consistent performance of the algorithm under varied conditions presents a positive prospect for real-world applications in microgrids, where reliability in uncertain environments is a major consideration.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}