
A Fault Recovery Scheme for Active Distribution Networks Based on the Chaotic Binary Sparrow Search Algorithm Considering Operational Risks

Abstract
1. Introduction
2. Methods & Materials
2.1. DG Equivalent for Contact Line and Comprehensive Power Restoration Model
2.1.1. Secondary System Structure
2.1.2. Integrated Power Supply Restoration Model Based on Generalized Islanding
2.2. Risk Constraint Method Based on Opportunity Constraints
2.2.1. Islanding Operation Risk Characteristics
2.2.2. Dynamic Restraint Method of Operating Risk During Fault Period
2.3. Model of Generalized Dynamic Island Division Considering Operational Risks
2.4. The Model of the Fault Recovery
2.4.1. The Objective Function
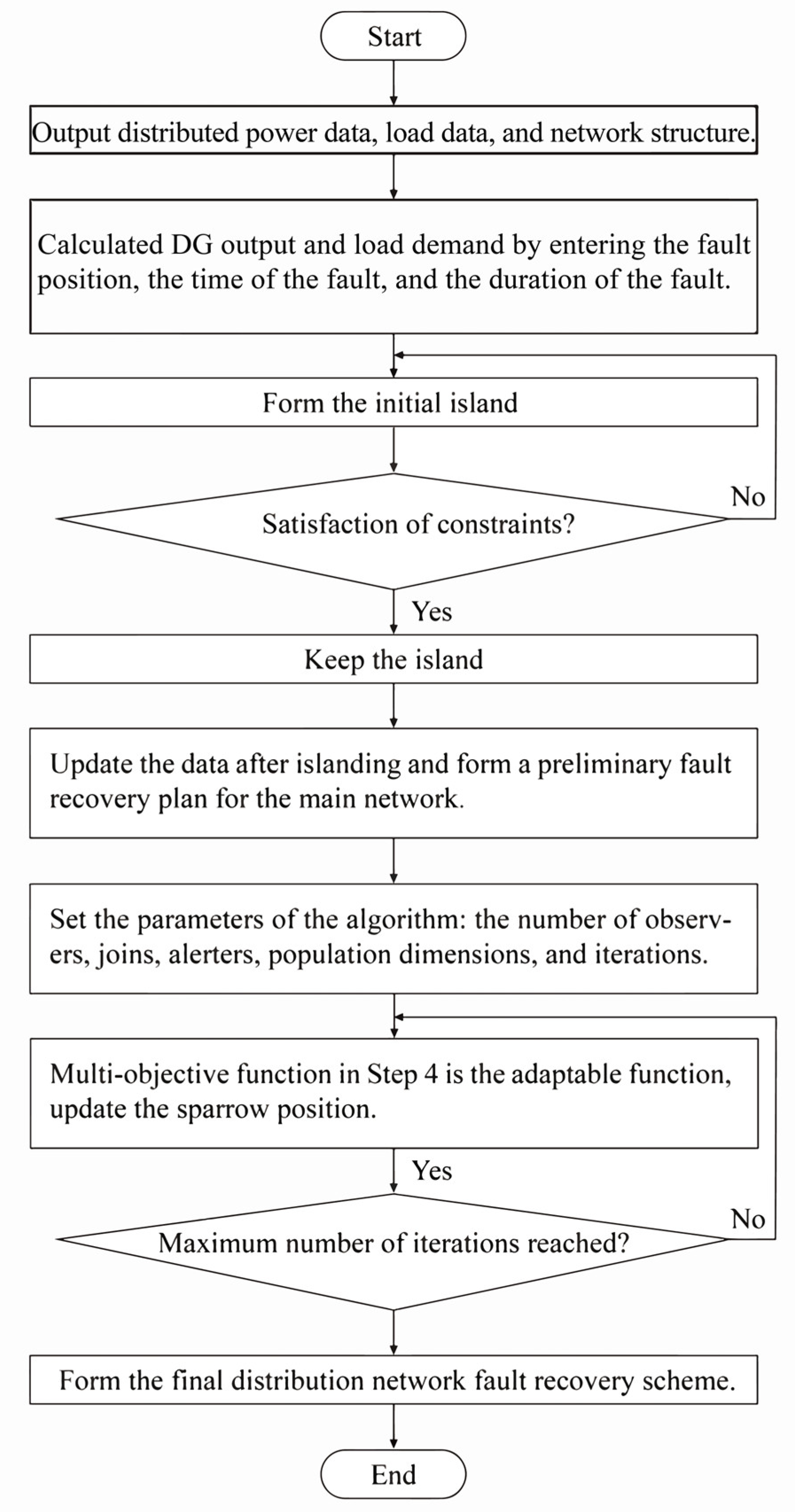
2.4.2. Chaotic Binary Sparrow Search Algorithm
3. Results and Discussion
3.1. Simulation Parameters
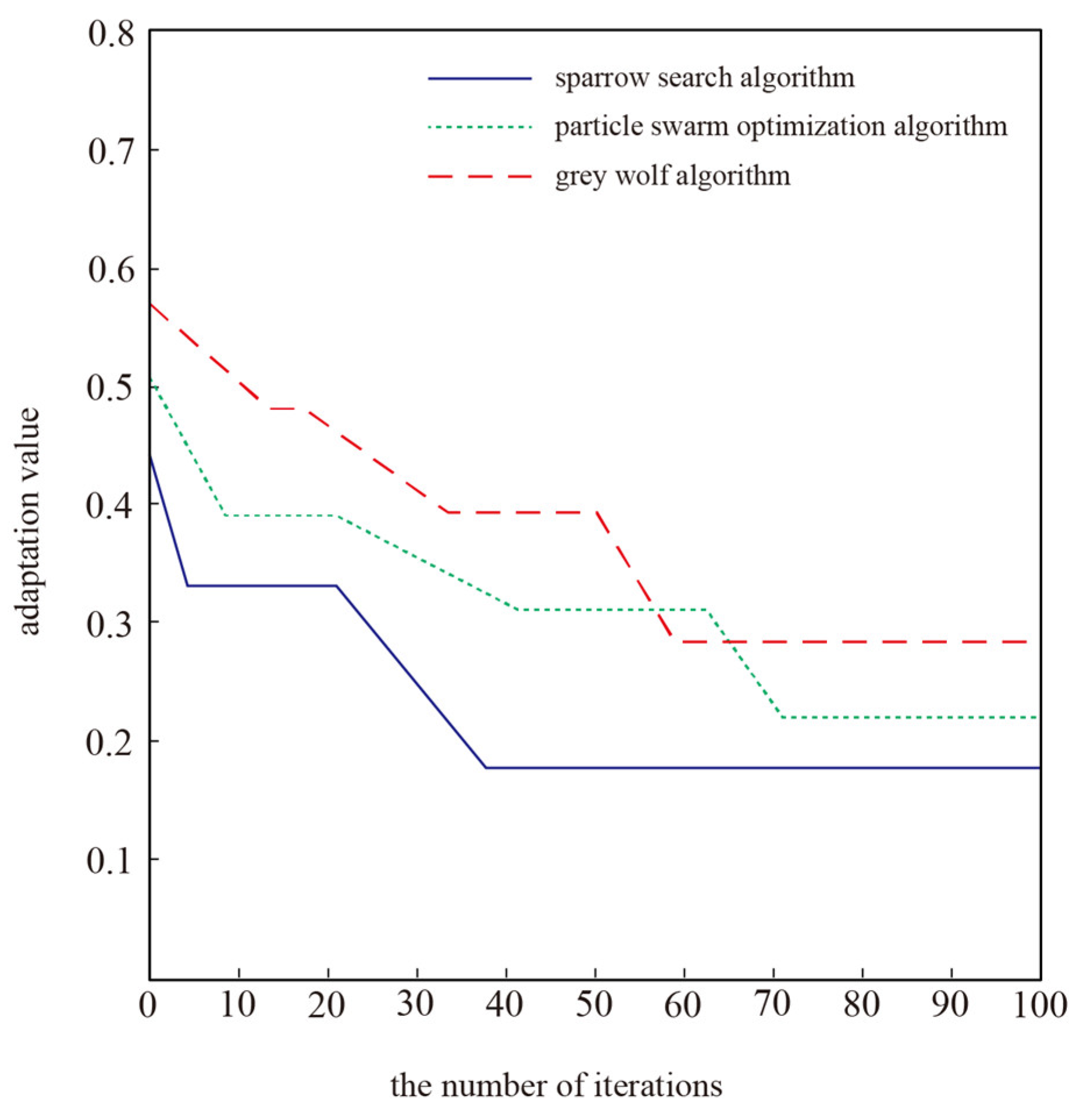
3.2. Results Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, S.; Cheng, J.; Pan, K.; Qiu, F.; Yang, B. Data-Driven Chance-Constrained Planning for Distributed Generation: A Partial Sampling Approach. IEEE Trans. Power Syst. 2023, 38, 5228–5244. [Google Scholar] [CrossRef]
- Zhou, K.; Fei, Z.; Lu, X. Optimal Energy Management of Internet Data Center with Distributed Energy Resources. IEEE Trans. Cloud Comput. 2023, 11, 2285–2295. [Google Scholar] [CrossRef]
- Li, J.; Zhou, X.; Zhou, Y.; Han, A. Optimal Configuration of Distributed Generation Based on an Improved Beluga Whale Optimization. IEEE Access 2024, 12, 31000–31013. [Google Scholar] [CrossRef]
- Igder, M.A.; Liang, X.; Mitolo, M. Service restoration through microgrid formation in distribution networks: A review. IEEE Access 2022, 10, 46618–46632. [Google Scholar] [CrossRef]
- Song, Z.; Lv, Z.; Yan, H.; Bai, J.; Zhou, S. Coordinated Control Method for Low Voltage Ride through and Anti-islanding Protection of Distributed PV Generation Based on Interharmonic Impedance. In Proceedings of the IEEE 14th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Shanghai, China, 9–12 June 2023; pp. 1132–1136. [Google Scholar]
- Baviskar, A.; Das, K.; Koivisto, M.; Hansen, A.D. Multi-Voltage Level Active Distribution Network with Large Share of Weather-Dependent Generation. IEEE Trans. Power Syst. 2022, 37, 4874–4884. [Google Scholar] [CrossRef]
- Tong, X.; Wang, Y.; Qiu, Z.; Huang, Y. Data-driven multi period operation optimization of active distribution networks. In Proceedings of the IEEE 3rd International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 27–29 October 2023; pp. 1295–1300. [Google Scholar]
- Hu, S.; Xiang, Y.; Liu, J.; Gu, C.; Zhang, X.; Tian, Y.; Liu, Z.; Xiong, J. Agent-Based Coordinated Operation Strategy for Active Distribution Network with Distributed Energy Resources. IEEE Trans. Ind. Appl. 2019, 55, 3310–3320. [Google Scholar] [CrossRef]
- Fathabad, A.M.; Cheng, J.; Pan, K.; Qiu, F. Data-driven planning for renewable distributed generation integration. IEEE Trans. Power Syst. 2020, 35, 4357–4368. [Google Scholar] [CrossRef]
- Ehsan, A.; Yang, Q. Optimal integration and planning of renewable distributed generation in the power distribution networks: A review of analytical techniques. Appl. Energy 2018, 210, 44–59. [Google Scholar] [CrossRef]
- Liang, X.; Saaklayen, M.A.; Igder, M.A.; Shawon, S.M.R.H.; Faried, S.O.; Janbakhsh, M. Planning and service restoration through microgrid formation and soft open points for distribution network modernization: A review. IEEE Trans. Ind. Appl. 2022, 58, 1843–1857. [Google Scholar] [CrossRef]
- Saaklayen, M.A.; Liang, X.; Faried, S.O.; Martirano, L.; Sutherland, P.E. Soft Open Point-Based Service Restoration Coordinated with Distributed Generation in Distribution Networks. IEEE Trans. Ind. Appl. 2024, 60, 2554–2566. [Google Scholar] [CrossRef]
- Ke, Y.L. Distribution feeder reconfiguration for load balancing and service restoration by using G-nets inference mechanism. IEEE Trans. Power Deliv. 2004, 19, 1426–1433. [Google Scholar] [CrossRef]
- Ji, H.; Wang, C.; Li, P.; Song, G.; Wu, J. SOP-based islanding partition method of active distribution networks considering the characteristics of DG, energy storage system and load. Energy 2018, 155, 312–325. [Google Scholar] [CrossRef]
- Dai, B. Multi-objective Optimization Model of Distribution Network Reconfiguration Considering Soft Open Point. In Proceedings of the China International Conference on Electricity Distribution (CICED), Changsha, China, 7–8 September 2022; pp. 468–472. [Google Scholar]
- Ding, T.; Wang, Z.; Jia, W.; Chen, B.; Chen, C.; Shahidehpour, M. Multiperiod Distribution System Restoration with Routing Repair Crews, Mobile Electric Vehicles, and Soft-Open-Point Networked Microgrids. IEEE Trans. Smart Grid 2020, 11, 4795–4808. [Google Scholar] [CrossRef]
- Zhang, T.; Yu, X.; Mu, Y.; Jia, H.; Hou, K.; Jin, X. Multiple sources restoration for soft open points in distribution networks with a two-stage accelerated algorithm. IEEE Trans. Sustain. Energy 2023, 14, 892–905. [Google Scholar] [CrossRef]
- Qiang, X.; Haibin, G.; Xugang, F.; Zhenzhi, C. Research on self-healing strategy of smart distribution grid based on improved ant colony algorithm. In Proceedings of the Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 390–395. [Google Scholar]
- Molaali, M.; Abedi, M. A New Heuristic Method for Distribution Network Restoration and Load Elimination Using Genetic Algorithm. In Proceedings of the Electrical Power Distribution Conference (EPDC), Tehran, Iran, 9–10 May 2018; pp. 46–51. [Google Scholar]
- Yu, X.; Wang, B.; Fu, J.; Liu, Y.; Yi, J. Research on Distribution Network Fault Recovery Algorithms with Distributed Generation. In Proceedings of the IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1425–1429. [Google Scholar]
- Zhou, Z.; Zhang, J.; Liu, P.; Li, Z.; Georgiadis, M.; Pistikopoulos, E. A two-stage stochastic programming model for the optimal design of distributed energy systems. Appl. Energy 2013, 103, 135–144. [Google Scholar]
- Cheng, Y.; Jiang, W. AUV 3D Path Planning Based on Improved Sparrow Search Algorithm. In Proceedings of the 2024 7th International Conference on Advanced Algorithms and Control Engineering (ICAACE), Shanghai, China, 1–3 March 2024; pp. 1592–1595. [Google Scholar]
- Liu, Q.; Zhang, Y.; Li, M.; Cao, Z.Z.N.; Shang, J. Multi-UAV path planning based on fusion of sparrow search algorithm and improved bioinspired neural network. IEEE Access 2021, 9, 124670–124681. [Google Scholar] [CrossRef]
- Yin, S.; Li, H.; Laghari, A.A.; Gadekallu, T.R.; Sampedro, G.A.; Almadhor, A. An anomaly detection model based on deep auto-encoder and capsule graph convolution via sparrow search algorithm in 6G Internet of Everything. IEEE Internet Things J. 2024, 11, 29402–29411. [Google Scholar] [CrossRef]
- Yin, H.; Lyu, Y.; Xu, L.; Gulliver, T.A. Intelligent optimization algorithm for green IoV networks based on SSA. IEEE Trans. Veh. Technol. 2025, 74, 2251–2260. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG | Node Number | DG Rated Power/kW | Energy Storage Rated Capacity |
|---|---|---|---|
| PV | 6 | 600 | 100 |
| PV | 20 | 600 | 100 |
| WT | 24 | 800 | 100 |
| WT | 31 | 800 | 100 |
| Load Level | Node Number | Load Weight of Each Node |
|---|---|---|
| 1 | 7, 9, 10, 11, 20, 26, 33, 37, 39 | 100 |
| 2 | 8, 17, 27, 34, 35, 40 | 10 |
| 3 | other | 1 |
| Island Division Scheme | Total Load Power Recovery/kW·h | Load Recovery Rate/% | Rp/% | Rv/% |
|---|---|---|---|---|
| static | 7622.5 | 78.6 | 3.1 | 5.8 |
| dynamic | 8456.5 | 87.2 | 1.6 | 4.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Chen, G.; Jiang, X.; Xiao, X.; Chen, Y.; Liu, C. A Fault Recovery Scheme for Active Distribution Networks Based on the Chaotic Binary Sparrow Search Algorithm Considering Operational Risks. Processes 2025, 13, 2128. https://doi.org/10.3390/pr13072128
Huang W, Chen G, Jiang X, Xiao X, Chen Y, Liu C. A Fault Recovery Scheme for Active Distribution Networks Based on the Chaotic Binary Sparrow Search Algorithm Considering Operational Risks. Processes. 2025; 13(7):2128. https://doi.org/10.3390/pr13072128
Chicago/Turabian StyleHuang, Weijie, Gang Chen, Xiaoming Jiang, Xiong Xiao, Yiyi Chen, and Chong Liu. 2025. "A Fault Recovery Scheme for Active Distribution Networks Based on the Chaotic Binary Sparrow Search Algorithm Considering Operational Risks" Processes 13, no. 7: 2128. https://doi.org/10.3390/pr13072128
APA StyleHuang, W., Chen, G., Jiang, X., Xiao, X., Chen, Y., & Liu, C. (2025). A Fault Recovery Scheme for Active Distribution Networks Based on the Chaotic Binary Sparrow Search Algorithm Considering Operational Risks. Processes, 13(7), 2128. https://doi.org/10.3390/pr13072128