
Robust Optimization of Hydraulic Fracturing Design for Oil and Gas Scientists to Develop Shale Oil Resources



Abstract
1. Introduction
2. Methodology
2.1. Displacement Discontinuity Method (DDM)
2.2. Fracture Propagation and Hydraulic Natural Fracture Interaction
2.3. Optimization of Fracture Design
- (1)
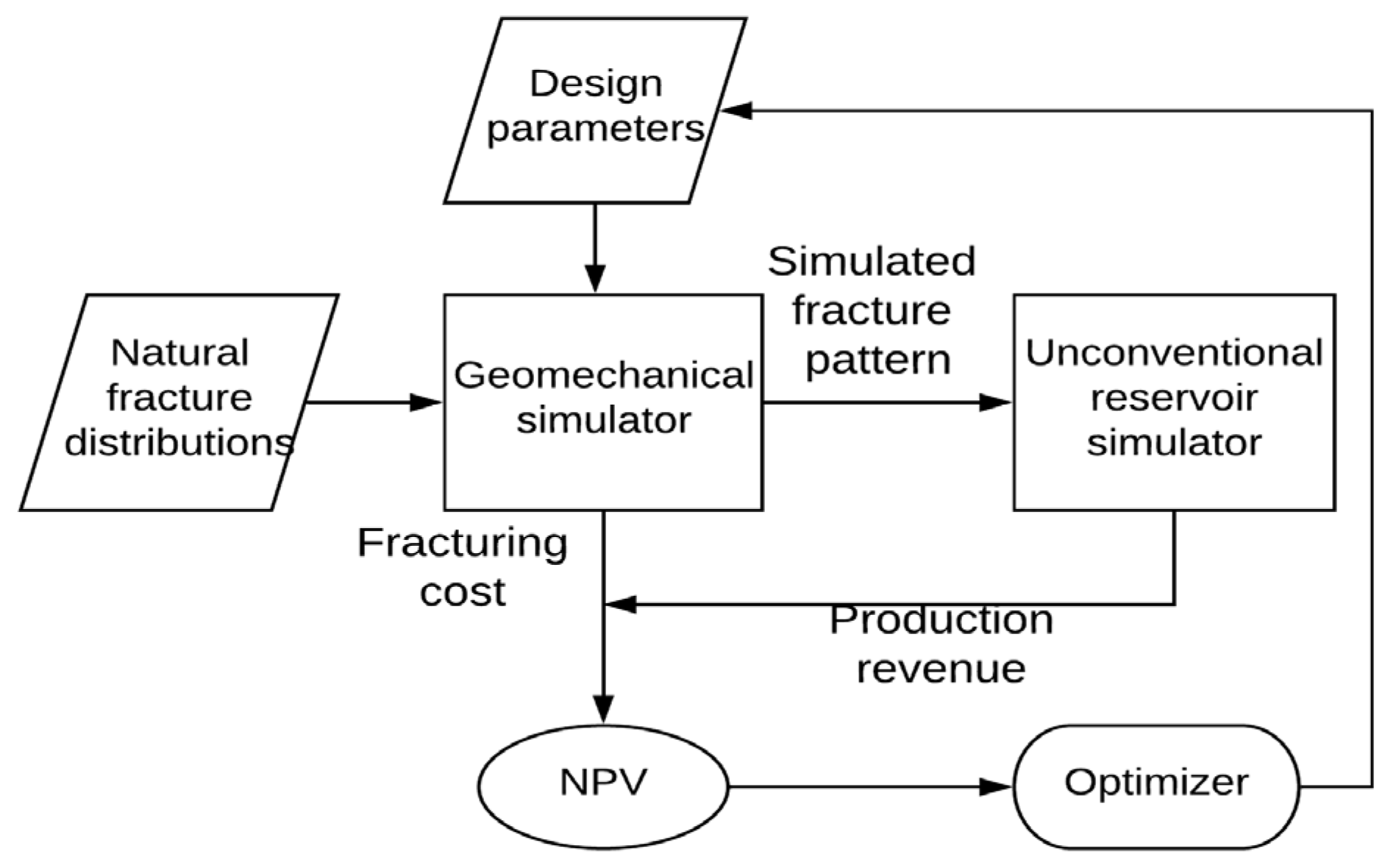
- The sequential coupling of DDM-based geo-mechanical simulation and EDFM-based reservoir simulation can effectively represent fracture propagation and flow in naturally fractured reservoirs;
- (2)
- Incorporating geological and geo-mechanical uncertainties improves the robustness of NPV-based design decisions;
- (3)
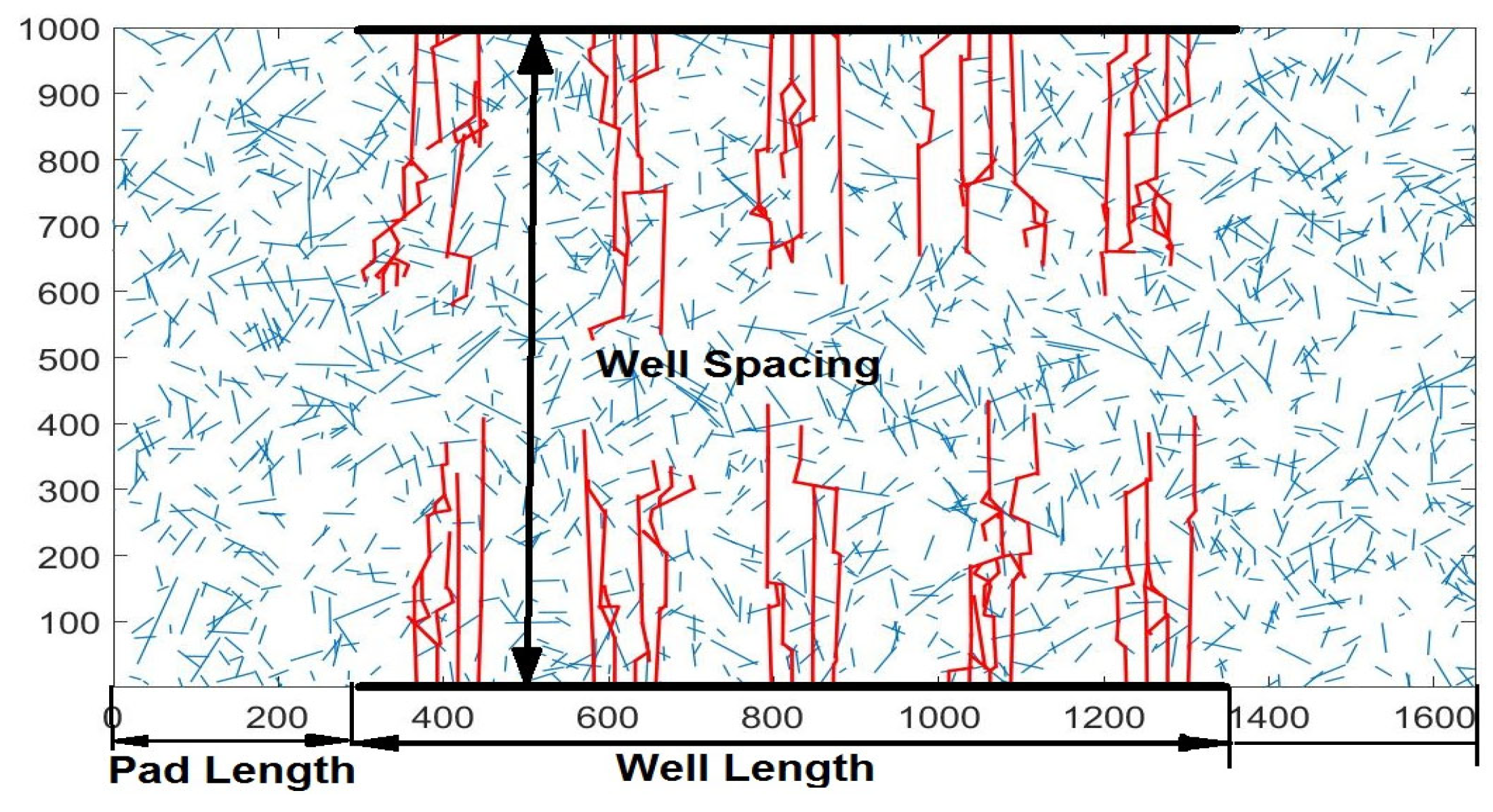
- The inclusion of well spacing as a design variable significantly influences drainage efficiency and economic performance in multi-well development scenarios.
3. Computational Results
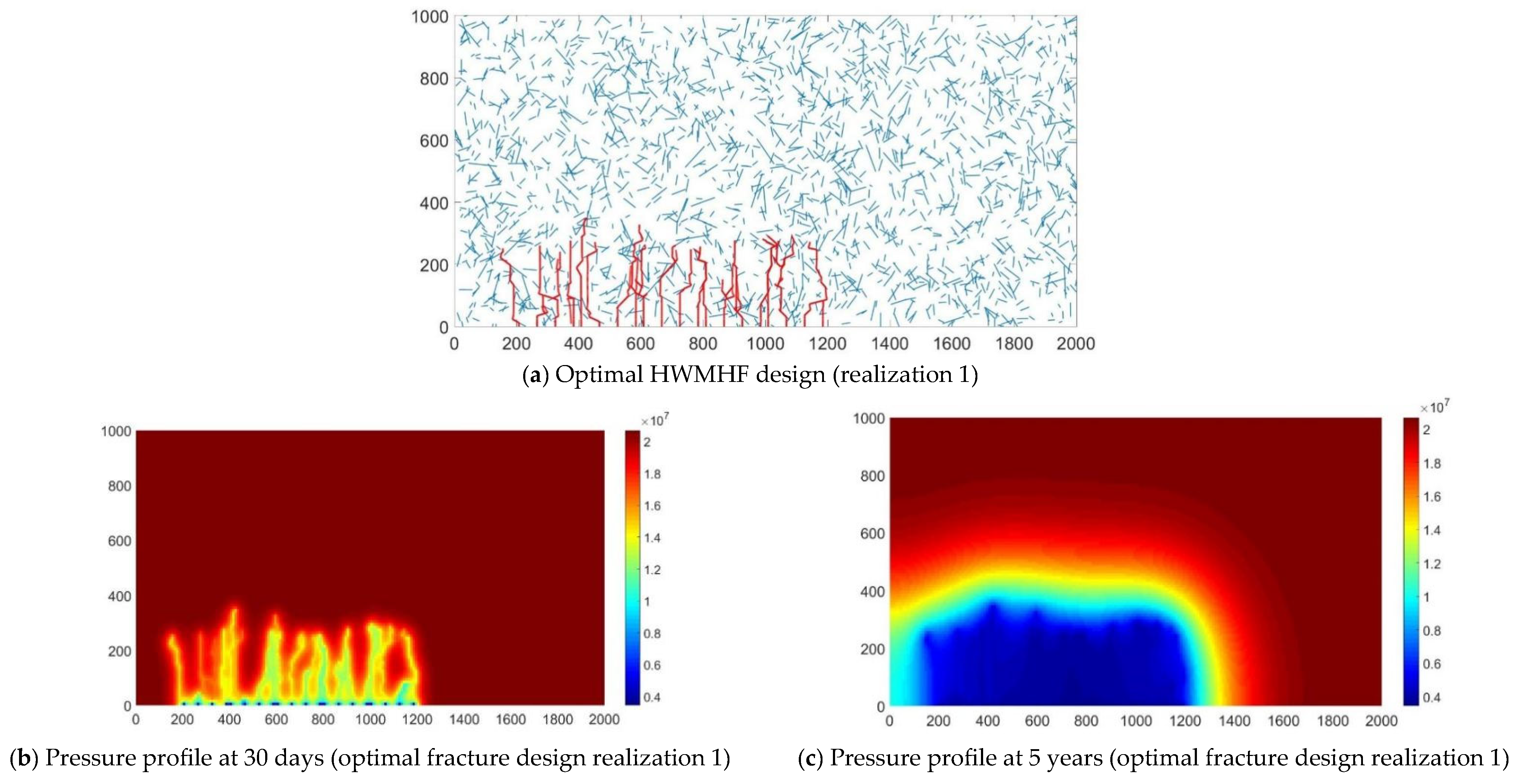
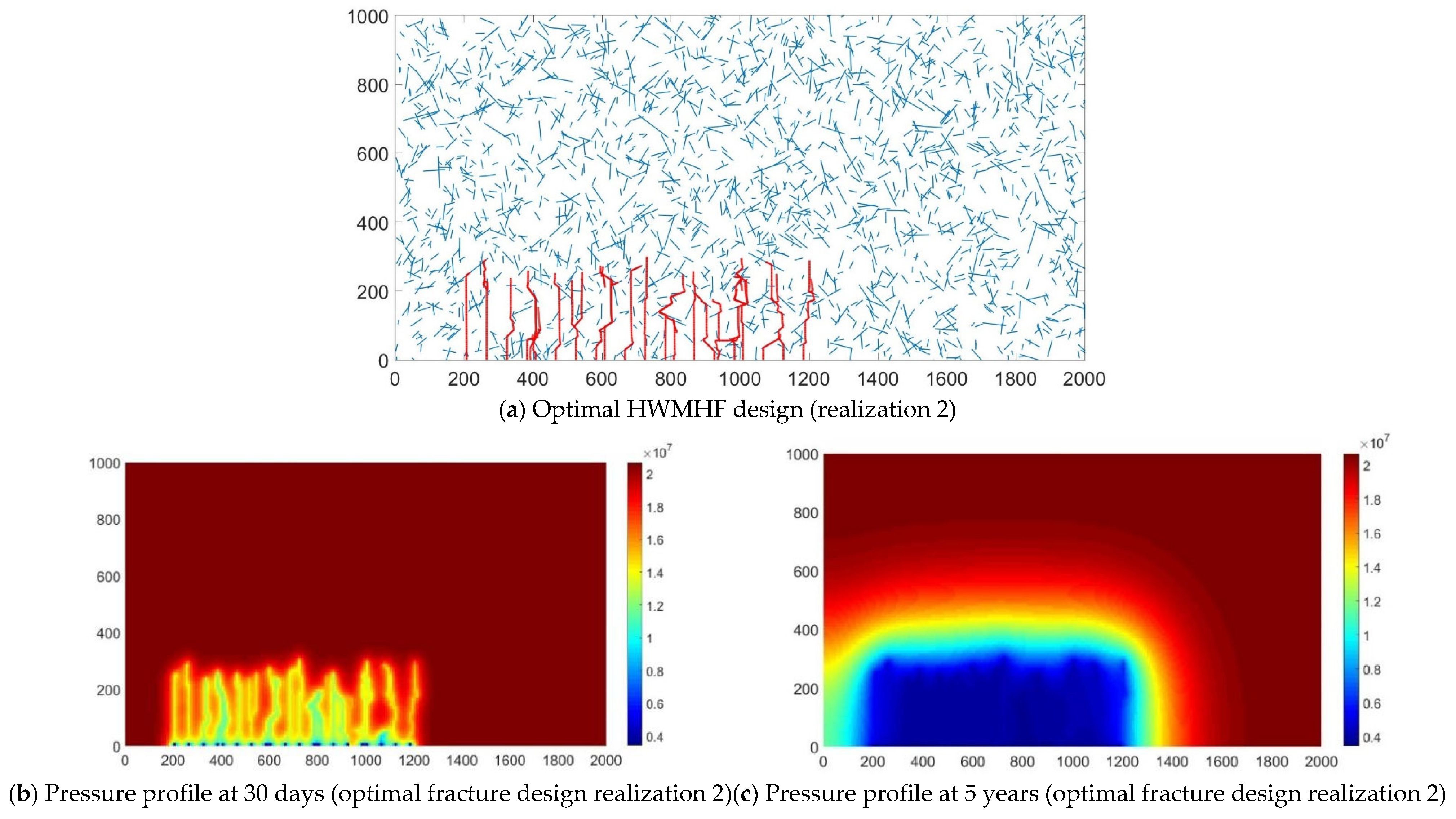
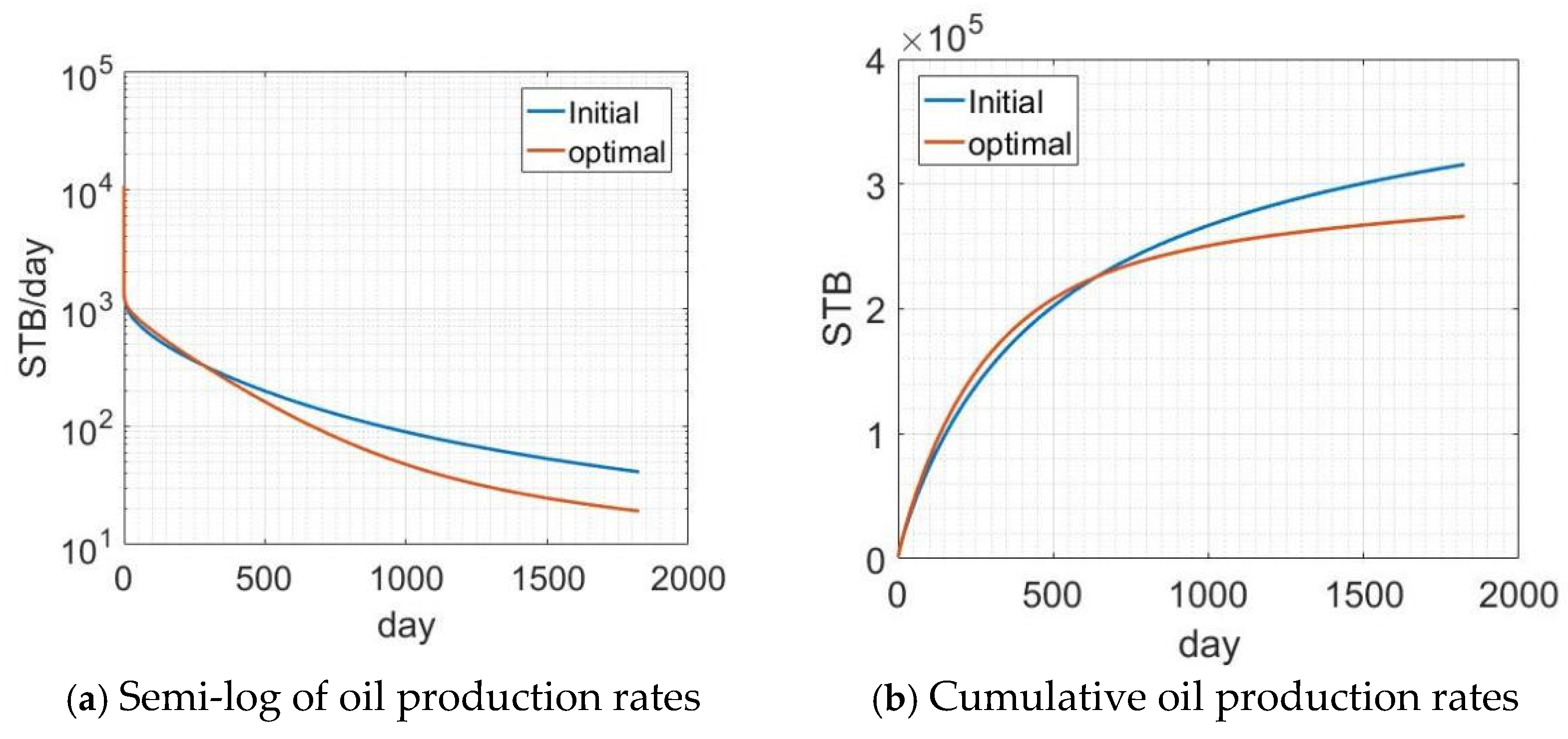
3.1. Fracture Design Optimization
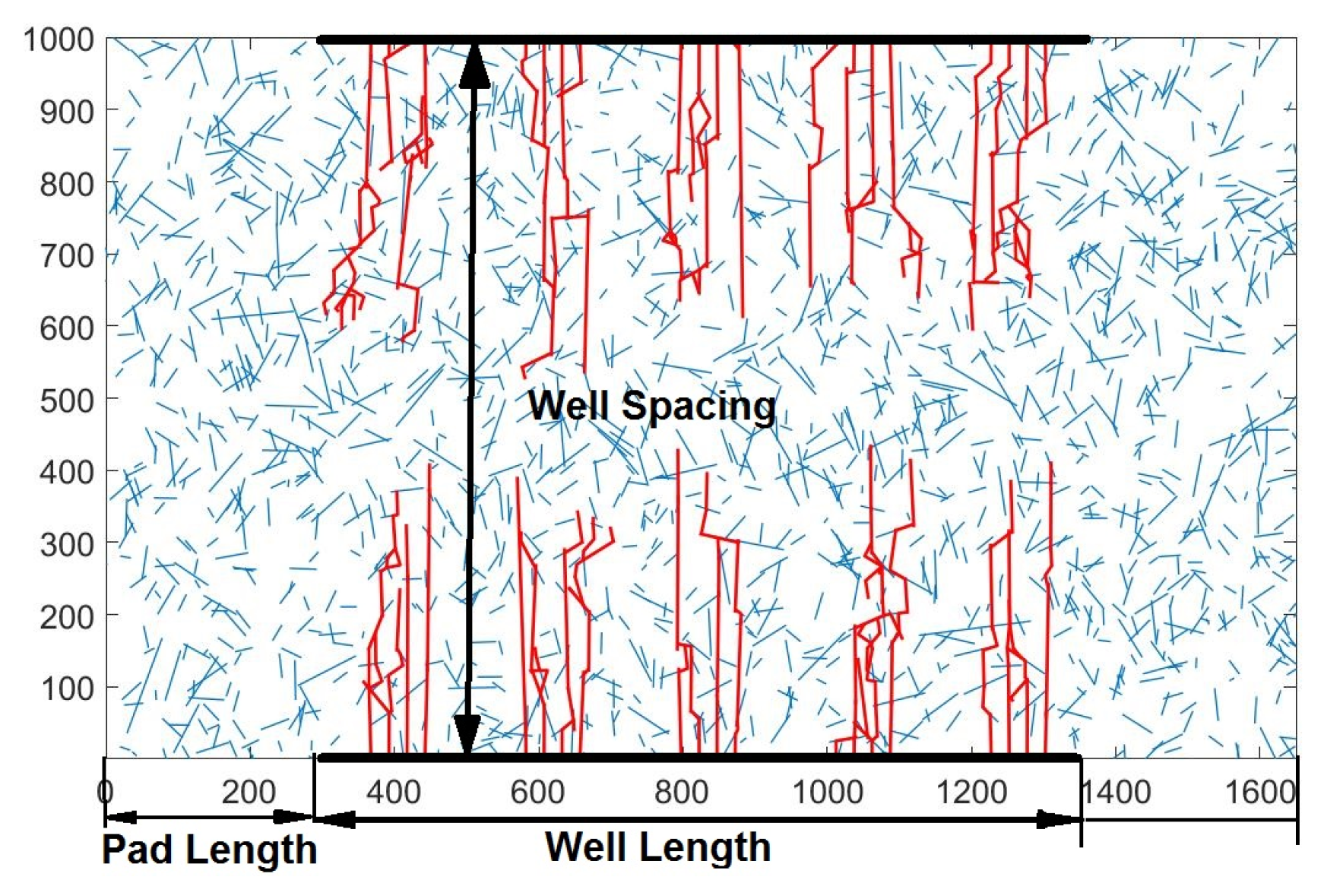
3.2. Well Spacing Optimization
4. Conclusions
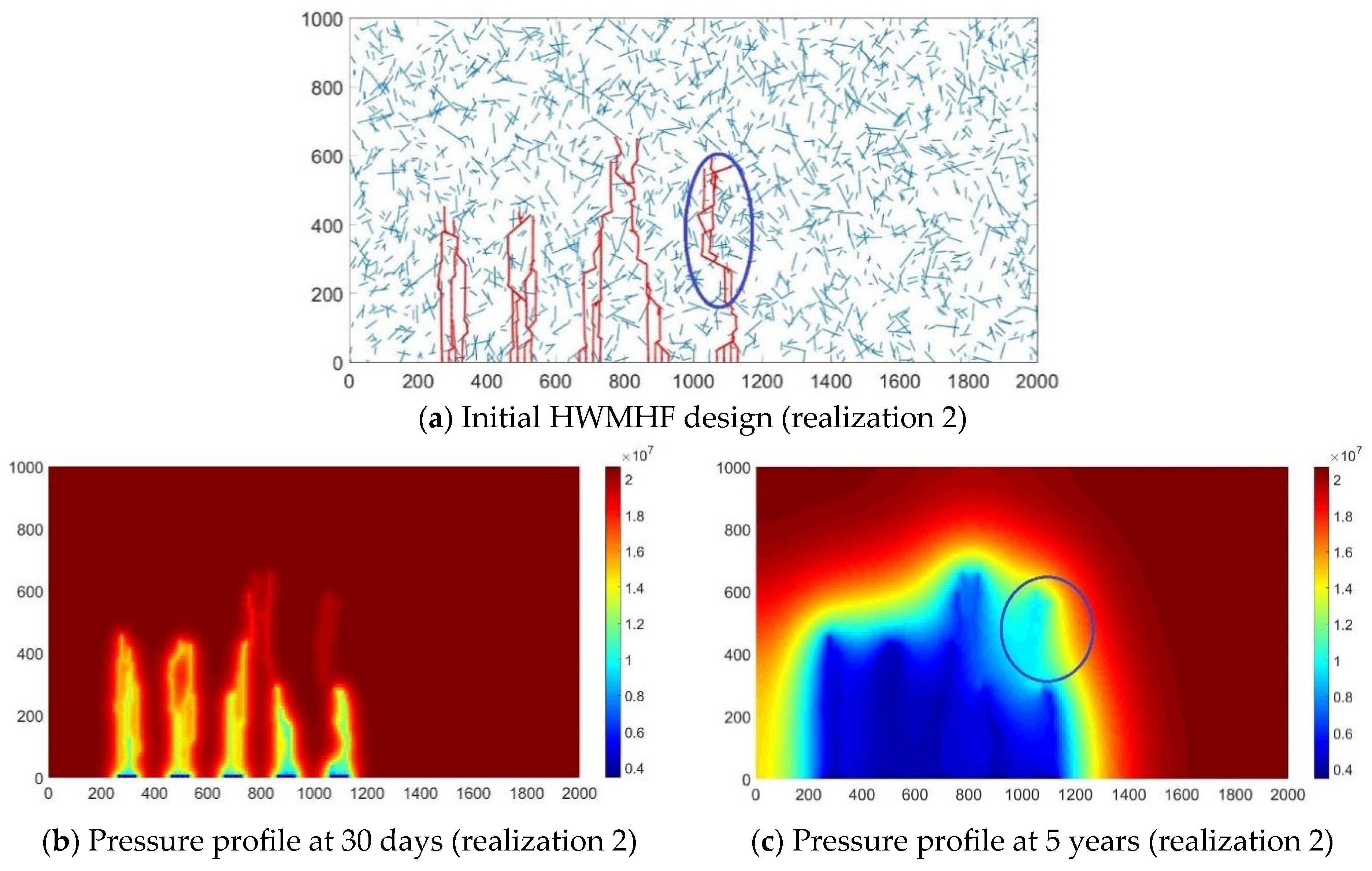
- Basic geo-mechanical principles and HF-NF interactions can be considered in the fracture propagation process, thus creating complex fracture patterns when using DDM. EDFM can be used to explicitly model multi-phase flow in the complex fracture network. HWMHF design and well spacing can be optimized effectively in naturally fractured oil reservoirs by combining the DDM and EDFM.
- Based on the work, oil and gas scientists can find the optimal strategy to develop unconventional resources. This will encourage them to make greater contributions to the oil and gas industry.
- Considering the uncertainties in the natural fracture location, length, and orientation, robust optimization is necessary, and the natural fracture patterns can be sampled from Gaussian distributions. When optimizing HWMHF design and well spacing, the objective function can be defined as the expected comprehensive NPV, which includes the drilling cost, fracturing cost, production revenue, and leasing cost.
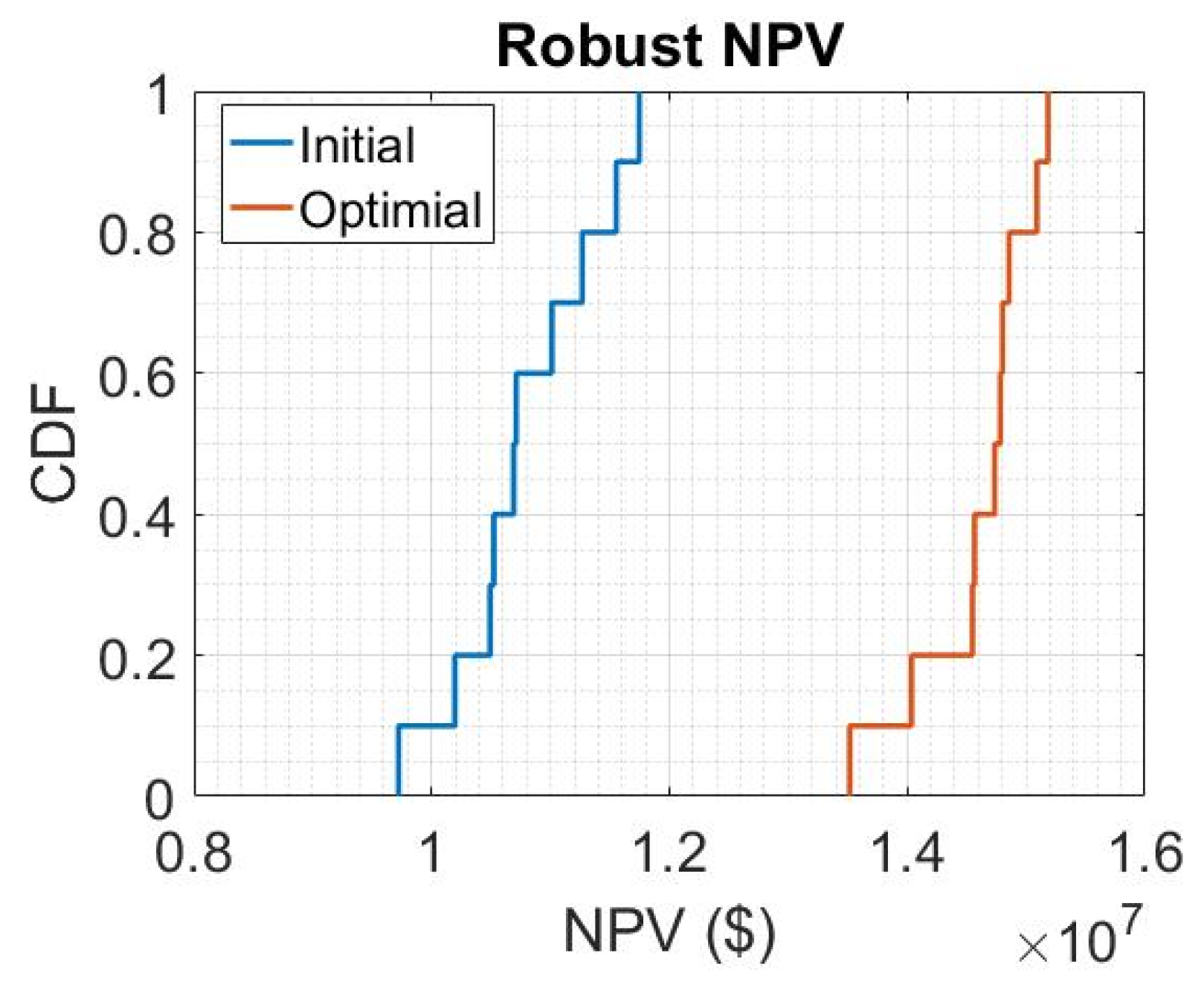
- As for the first case in optimizing fracture spacing, stage spacing, treatment pressure, and treatment volume, compared to PSO and GA, the pattern search algorithm yields the best performance in terms of the maximum expected NPV and the computational cost. Compared to the initial guess, the pattern search algorithms improve the average comprehensive NPV by 35 with only forward simulation runs.
- As for the second case with well spacing added, the estimated optimal design parameters obtained from robust optimization give an average comprehensive NPV equal to 2.81, which is 102.4 higher than the average comprehensive NPV (1.38) obtained with the initial design parameters.
- The future work will incorporate real field production and microseismic data to validate and calibrate the simulation models. Additionally, extending the optimization framework to multi-well pads with interference modeling will be applied in the field-scale applications.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zoback, M.D. Reservoir Geomechanics; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Zoback, M.D.; Kohli, A.H. Unconventional Reservoir Geomechanics; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Zou, J.; Chen, W.; Yang, D.; Yu, H.; Yuan, L. Complex hydraulic-fracture-network propagation in a naturally fractured reservoir. Comput. Geotech. 2021, 135, 104165. [Google Scholar] [CrossRef]
- Hekmatnejad, A.; Crespin, B.; Pan, P.Z.; Emery, X.; Mancilla, F.; Morales, M.; Seyedrahimi-Niaraq, M.; Schachter, P.; Gonzalez, R. A hybrid approach to predict hang-up frequency in real scale block cave mining at El Teniente mine, Chile. Tunn. Undergr. Space Technol. 2021, 118, 104160. [Google Scholar] [CrossRef]
- Fossen, H. Structural Geology; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Mack, M.G.; Elbel, J.L.; Piggott, A.R. Numerical representation of multilayer hydraulic fracturing. In Proceedings of the 33th US Symposium on Rock Mechanics (USRMS), Santa Fe, NM, USA, 3 June 1992. ARMA-92-0657. [Google Scholar]
- Xu, W.; Le Calvez, J.H.; Thiercelin, M.J. Characterization of hydraulically-induced fracture network using treatment and microseismic data in a tight-gas sand formation: A geomechanical approach. In Proceedings of the SPE Tight Gas Completions Conference, San Antonio, TX, USA, 15 June 2009. SPE 119881. [Google Scholar]
- Dahi-Taleghani, A.; Olson, J.E. Numerical modeling of multistranded-hydraulic-fracture propagation: Accounting for the interaction between induced and natural fractures. SPE J. 2011, 16, 575–581. [Google Scholar] [CrossRef]
- Wu, K.; Olson, J.E. Simultaneous multifracture treatments: Fully coupled fluid flow and fracture mechanics for horizontal wells. SPE J. 2015, 20, 337–346. [Google Scholar] [CrossRef]
- Warren, J.; Root, P.J. The behavior of naturally fractured reservoirs. SPE J. 1963, 3, 245–255. [Google Scholar] [CrossRef]
- Pruess, K.; Narasimhan, T. A practical method for modeling fluid and heat flow in fractured porous media. SPE J. 1982, 22, 14–26. [Google Scholar] [CrossRef]
- Moinfar, A.; Narr, W.; Hui, M.-H.; Mallison, B.T.; Lee, S.H. Comparison of discrete fracture and dual-permeability models for multiphase flow in naturally fractured reservoirs. In Proceedings of the SPE Reservoir Simulation Symposium, The Woodlands, TX, USA, 21 February 2011. SPE 142295. [Google Scholar]
- Wu, Y.-S.; Pruess, K. A multiple-porosity method for simulation of naturally fractured petroleum reservoirs. SPE J. 1986, 26, 327–336. [Google Scholar] [CrossRef]
- Li, L.; Lee, S.H. Efficient field-scale simulation for black oil in a naturally fractured reservoir via discrete fracture networks and homogenized media. SPE J. 2008, 13, 295–303. [Google Scholar] [CrossRef]
- Moinfar, A.; Varavei, A.; Sepehrnoori, K.; Johns, R.T. Development of a novel and computationally-efficient discrete-fracture model to study IOR processes in naturally fractured reservoirs. In Proceedings of the SPE Improved Oil Recovery Symposium, Tulsa, OK, USA, 14 April 2012. SPE 154263. [Google Scholar]
- Brouwer, D.R.; Nævdal, G.; Jansen, J.D.; Vefring, E.H.; van Kruijsdijk, C.P.J.W. Improved reservoir management through optimal control and continuous model updating. In Proceedings of the SPE Annual Technical Conference and Exhibition, Houston, TX, USA, 26–29 September 2004. SPE 90149. [Google Scholar]
- Jansen, J.; Brouwer, D.; Naevdal, G.; van Kruijsdijk, C. Closed-loop reservoir management. First Break 2005, 23, 43–48. [Google Scholar] [CrossRef]
- Chen, C.; Li, G.; Reynolds, A. Robust constrained optimization of short-and long-term net present value for closed-loop reservoir management. SPE J. 2012, 17, 849–864. [Google Scholar] [CrossRef]
- Jansen, J.D. Adjoint-based optimization of multi-phase flow through porous media. Comput. Fluids 2011, 46, 40–51. [Google Scholar] [CrossRef]
- Chen, Y.; Oliver, D.S.; Zhang, D. Efficient ensemble-based closed-loop production optimization. SPE J. 2009, 14, 634–645. [Google Scholar] [CrossRef]
- Chen, B.; Reynolds, A.C. Ensemble-based optimization of the water-alternating-gas-injection process. SPE J. 2016, 21, 786–798. [Google Scholar] [CrossRef]
- Shirangi, M.G.; Durlofsky, L.J. Closed-loop field development under uncertainty by use of optimization with sample validation. SPE J. 2015, 20, 908–922. [Google Scholar] [CrossRef]
- Liu, Z.; Forouzanfar, F. Ensemble clustering for efficient robust optimization of naturally fractured reservoirs. Comput. Geosci. 2018, 22, 283–296. [Google Scholar] [CrossRef]
- Liu, Z.; Reynolds, A.C. An SQP-Filter algorithm with an improved stochastic gradient for robust life-cycle optimization problems with nonlinear constraints. In Proceedings of the SPE Reservoir Simulation Conference, Galveston, TX, USA, 29 March 2019. SPE 193898. [Google Scholar]
- Fonseca, R.; Stordal, A.; Leeuwenburgh, O.; Van den Hof, P.; Jansen, J. Robust ensemble-based multi-objective optimization. In Proceedings of the ECMOR XIV-14th European Conference on the Mathematics of Oil Recovery, Catania, Italy, 8–11 September 2014; European Association of Geoscientists & Engineers: Bunnik, The Netherlands, 2014; Volume 2014, pp. 1–14. [Google Scholar]
- Liu, X.; Reynolds, A.C. Multiobjective optimization for maximizing expectation and minimizing uncertainty or risk with application to optimal well control. In Proceedings of the SPE Reservoir Simulation Symposium, Houston, TX, USA, 23 February 2015. SPE 173249. [Google Scholar]
- Wilson, K.C.; Durlofsky, L.J. Optimization of shale gas field development using direct search techniques and reduced-physics models. J. Pet. Sci. Eng. 2013, 108, 304–315. [Google Scholar] [CrossRef]
- Ma, X.; Gildin, E.; Plaksina, T. Efficient optimization framework for integrated placement of horizontal wells and hydraulic fracture stages in unconventional gas reservoirs. J. Unconv. Oil Gas Resour. 2015, 9, 1–17. [Google Scholar] [CrossRef]
- Li, J.; Gong, B.; Wang, H. Mixed integer simulation optimization for optimal hydraulic fracturing and production of shale gas fields. Eng. Optim. 2016, 48, 1378–1400. [Google Scholar] [CrossRef]
- Wang, S.; Chen, S. Integrated well placement and fracture design optimization for multi-well pad development in tight oil reservoirs. Comput. Geosci. 2019, 23, 471–493. [Google Scholar] [CrossRef]
- Wang, L.; Yao, Y.; Zhao, G.; Adenutsi, C.D.; Wang, W.; Lai, F. A hybrid surrogate-assisted integrated optimization of horizontal well spacing and hydraulic fracture stage placement in naturally fractured shale gas reservoir. J. Pet. Sci. Eng. 2022, 216, 110842. [Google Scholar] [CrossRef]
- Yao, J.; Li, Z.; Liu, L.; Fan, W.; Zhang, M.; Zhang, K. Optimization of fracturing parameters by modified variable-length particle-swarm optimization in shale-gas reservoir. SPE J. 2021, 26, 1032–1049. [Google Scholar] [CrossRef]
- Li, W.; Zhang, T.; Liu, X.; Dong, Z.; Dong, G.; Qian, S.; Zhang, T. Machine learning-based fracturing parameter optimization for horizontal wells in Panke field shale oil. Sci. Rep. 2024, 14, 6046. [Google Scholar] [CrossRef]
- Lu, C.; Jiang, H.; Yang, J.; Wang, Z.; Zhang, M.; Li, J. Shale oil production prediction and fracturing optimization based on machine learning. J. Pet. Sci. Eng. 2022, 217, 110900. [Google Scholar] [CrossRef]
- Zhang, H.; Sheng, J.J. Complex fracture network simulation and optimization in naturally fractured shale reservoir based on modified neural network algorithm. J. Nat. Gas Sci. Eng. 2021, 95, 104232. [Google Scholar] [CrossRef]
- Gidley, J.L. Recent Advances in Hydraulic Fracturing; SPE Monograph Series; Society of Petroleum Engineers: Richardson, TX, USA, 1989; Volume 12. [Google Scholar]
- Sih, G.C. On the crack extension in plates under plane loading and transverse shear. J. Fluids Eng. 1963, 85, 462–468. [Google Scholar]
- Lu, R.; Forouzanfar, F.; Reynolds, A.C. An efficient adaptive algorithm for robust control optimization using StoSAG. J. Pet. Sci. Eng. 2017, 159, 314–330. [Google Scholar] [CrossRef]
- Liu, Z.; Forouzanfar, F.; Zhao, Y. Comparison of SQP and AL algorithms for deterministic constrained production optimization of hydrocarbon reservoirs. J. Pet. Sci. Eng. 2018, 171, 542–557. [Google Scholar] [CrossRef]
- Wu, K.; Olson, J.E. Numerical investigation of complex hydraulic-fracture development in naturally fractured reservoirs. SPE Prod. Oper. 2016, 31, 300–309. [Google Scholar] [CrossRef]
- Crouch, S.L. Solution of plane elasticity problems by the displacement discontinuity method. I. infinite body solution. Int. J. Numer. Methods Eng. 1976, 10, 301–343. [Google Scholar] [CrossRef]
- Crouch, A.M.; Starfield, R.F.J. Boundary Element Methods in Solid Mechanics; McGraw-Hill: London, UK, 1983; Volume 17. [Google Scholar]
- Olson, J.E. Predicting fracture swarms—The influence of subcritical crack growth and the crack-tip process zone on joint spacing in rock. Geol. Soc. Lond. Spec. Publ. 2004, 231, 73–88. [Google Scholar] [CrossRef]
- Kaiser, M.J. A survey of drilling cost and complexity estimation models. Int. J. Pet. Sci. Technol. 2007, 1, 1–22. [Google Scholar]
- Mayerhofer, M.J.; Lolon, E.; Warpinski, N.R.; Cipolla, C.L.; Walser, D.W.; Rightmire, C.M. What is stimulated reservoir volume? SPE Prod. Oper. 2010, 25, 89–98. [Google Scholar] [CrossRef]
- Mettam, G.R.; Adams, L.B. How to Prepare an Electronic Version of Your Article; Jones, B.S., Smith, R.Z., Eds.; Introduction to the Electronic Age; E-Publishing Inc.: New York, NY, USA, 2023; pp. 281–304. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variables | Initial | Lower | Upper |
|---|---|---|---|
| Fracture spacing (m) | 20 | 20 | 100 |
| Stage spacing (m) | 70 | 20 | 100 |
| Treatment volume () | 800 | 200 | 1200 |
| Treatment pressure () | 23.5 | 21.5 | 24.5 |
| Optimization Algorithm | Average NPV () | Num. of Simulation |
|---|---|---|
| GA | 1.41 | 15,000 |
| PSO | 1.33 | 15,000 |
| PS | 1.46 | 250 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Q.; Fang, W.; Zhang, L.; Mu, Q.; Li, H.; Li, L.; Wang, B. Robust Optimization of Hydraulic Fracturing Design for Oil and Gas Scientists to Develop Shale Oil Resources. Processes 2025, 13, 1920. https://doi.org/10.3390/pr13061920
Lin Q, Fang W, Zhang L, Mu Q, Li H, Li L, Wang B. Robust Optimization of Hydraulic Fracturing Design for Oil and Gas Scientists to Develop Shale Oil Resources. Processes. 2025; 13(6):1920. https://doi.org/10.3390/pr13061920
Chicago/Turabian StyleLin, Qiang, Wen Fang, Li Zhang, Qiuhuan Mu, Hui Li, Lizhe Li, and Bo Wang. 2025. "Robust Optimization of Hydraulic Fracturing Design for Oil and Gas Scientists to Develop Shale Oil Resources" Processes 13, no. 6: 1920. https://doi.org/10.3390/pr13061920
APA StyleLin, Q., Fang, W., Zhang, L., Mu, Q., Li, H., Li, L., & Wang, B. (2025). Robust Optimization of Hydraulic Fracturing Design for Oil and Gas Scientists to Develop Shale Oil Resources. Processes, 13(6), 1920. https://doi.org/10.3390/pr13061920