1. Introduction
From October 2019 to April 2020, China conducted the second gas hydrate pilot production in the Shenhu area of the South China Sea [
1]. During the pilot, suction pile and jetting 36-inch conductor construction technology was used, which verified the application prospects of suction pile technology in offshore gas hydrate extraction. However, several issues were exposed during this pilot, including shallow hydrate reservoir depth, high tilting difficulty, and high dog-leg severity in the riser pipe. To address these problems, researchers have proposed the use of pre-fabricated inclined suction pile conductors at the wellhead [
2], which involves using conductors with adjustable tilt angles at the suction pile wellhead. The maximum pre-tilted angle can reach 15°, which significantly reduces the dog-leg severity in the inclination section. However, compared to conventional straight conductors, these pre-tilted conductors experience more complex stress states during operation, leading to a higher risk of failure. Moreover, research on their structural design and safety control technology still lacks sufficient theoretical foundation. Therefore, this paper conducts a systematic analysis of the mechanical response characteristics of pre-tilted conductors at suction pile wellheads, aiming to establish a computational method for evaluating the working performance of pre-tilted conductors and provide theoretical support for their structural design and safety control technologies.
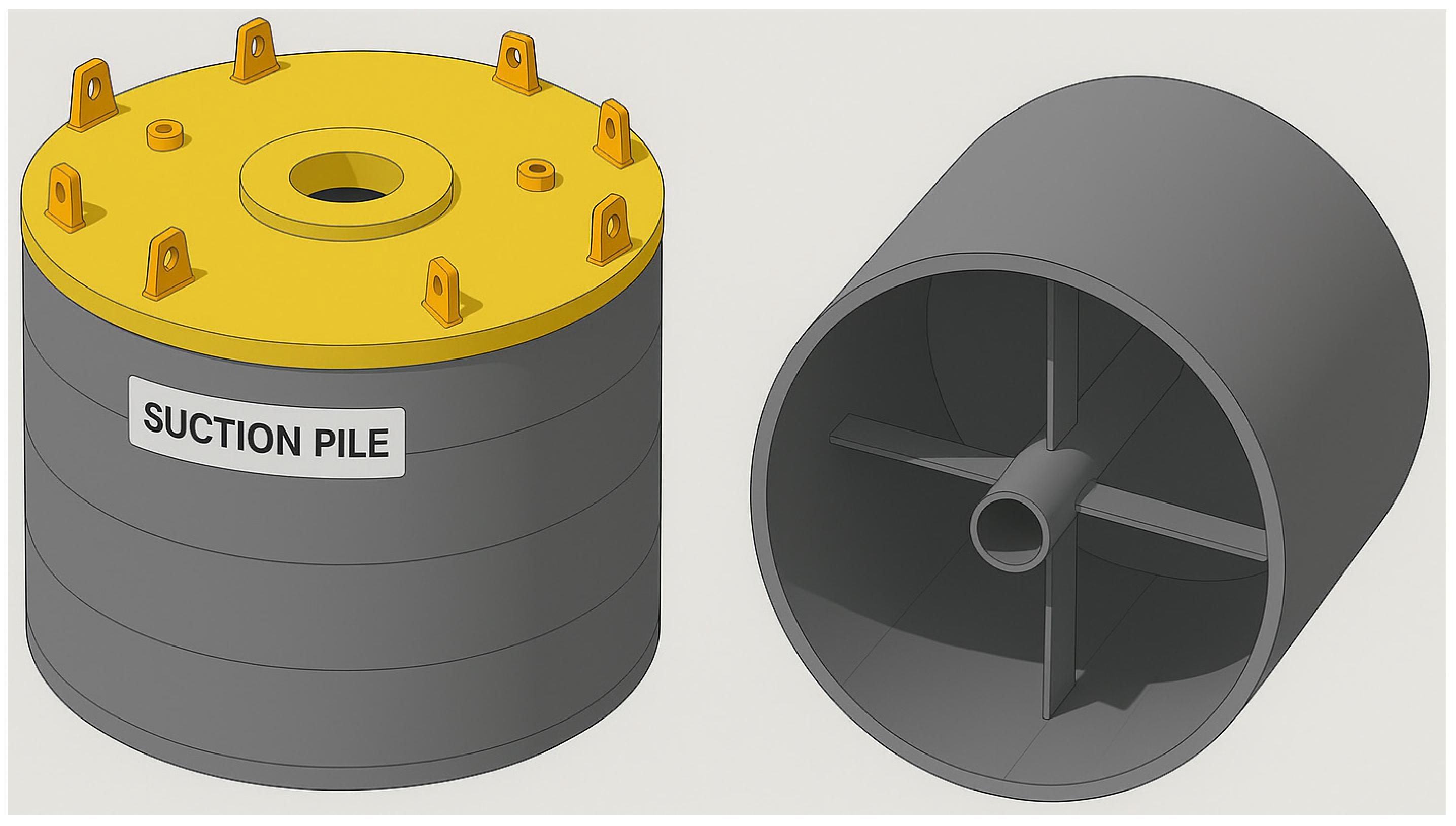
The single suction pile is primarily constructed from a steel suction pile with a closed top and an open bottom, resembling an inverted barrel. The suction pile wellhead device is a specially designed structure for suction piles, as shown in
Figure 1. As a mooring technology, the application of suction piles in deep water has already matured internationally. Companies such as Eni Norway, Neodrill AS, and Det Norske Oljeselskap ASA [
3] have each developed their respective suction pile wellhead technologies. In addition, during China’s 2020 offshore gas hydrate pilot [
1], suction pile technology was used for well construction, meeting the engineering requirements of the trial production. Furthermore, Wang Lei and colleagues from Sinopec [
2] proposed a suction pile conductor device with a pre-tilted function in their invention patent. This device allows for a pre-tilted angle of up to 15°, effectively reducing dog-leg severity to 6° per 30 m.
In recent decades, numerous scholars have made significant achievements in the study of the dynamic interaction between piles and surrounding soil. Based on different modeling approaches to pile–soil interactions, three main models have been developed and proposed: the Winkler foundation model, Novak’s plane-strain model, and the three-dimensional continuous medium model [
4]. Among these, the Winkler foundation model is widely used due to its structural simplicity and computational efficiency. It can simulate pile–soil dynamic interactions under small deformation conditions and capture nonlinear behaviors such as slippage and detachment between the pile and surrounding soil under large deformations. However, this model neglects the continuity of stress–strain in the foundation soil and is highly dependent on experimental data, which limits its applicability. The three-dimensional continuous medium model places more emphasis on the longitudinal continuity of the soil and can accurately reflect the three-dimensional wave effects in the soil. However, its complex analytical solutions and potential convergence issues make it challenging for engineering applications. The Novak’s plane-strain model, developed on the basis of the Winkler foundation model, offers a balance between computational efficiency and physical accuracy. It effectively captures radiation damping and radial wave effects, making it widely applicable for time–frequency domain analysis of pile foundations under dynamic loading conditions.
The Novak’s plane-strain model was first proposed by Novak et al. [
5], who equated the soil surrounding the pile to a series of independent infinitely thin layers, ignoring the longitudinal interactions between these layers. This approach simplifies the plane-strain representation of the pile–soil system, allowing for an analytical solution of the soil’s complex stiffness. As a result, the Novak model provides an alternative to the Winkler foundation model by offering a more accurate representation of soil damping and stiffness effects.
In recent studies, Liu Linchao et al. [
6,
7,
8,
9] investigated the horizontal dynamic impedance of a single pile in a viscoelastic soil layer. Based on Novak’s plane-strain model, they extended it to saturated soil media, analyzing the vertical and horizontal vibration characteristics of a single pile in saturated soil and the vertical and horizontal dynamic interactions of pile groups. Liu [
6] analyzed longitudinal and transverse vibrations of single and group piles in saturated soil using porous media theory. Liu and Yang [
7] derived horizontal displacement attenuation functions and expressions for stiffness and damping via a plane-strain model and wave propagation theory. Liu and Yan [
8] incorporated fractional derivatives and viscoelastic theories to model horizontal vibration, showing impedance degeneration to classical cases. Gao, Liu, and Yan [
9] treated surrounding soil as a viscoelastic medium with fractional properties, confirming similar degeneration for pile groups. Wu Wenbing et al. [
10,
11] employed a complex stiffness transfer method using a multi-layered plane-strain model and solved the dynamic impedance of the longitudinal vibration of wedge piles in layered soil using the Laplace transform and impedance function transfer methods. Yang Dongying and Ding Haiping [
12] established a virtual pile–soil model based on the plane-strain model and derived the shear complex stiffness of the soil surrounding the pile through the multi-layered complex stiffness transfer method. They then obtained both frequency-domain and time-domain analytical solutions for the pile head based on boundary continuity conditions. Han Hongxia et al. [
13] used the Fourier expansion method to derive the analytical expression for the horizontal dynamic impedance of the soil around the pile and derived the analytical solution for the horizontal impedance of a single pile. Cui Chunyi et al. [
14,
15,
16], based on the plane-strain model and the viscous damping soil model, investigated the effects of radial heterogeneity in the surrounding soil and the impact of longitudinal layering on the longitudinal vibration behavior of piles in heterogeneous viscous damping soil. Cui et al. [
14] modeled pipe piles as elastic bodies in axisymmetric viscous soil, assessing structural and soil disturbance effects. Cui et al. [
15] introduced a complex stiffness transfer model for radially layered soil, analyzing radial heterogeneity via parametric studies. Cui et al. [
16] proposed a multi-ring plane-strain model, deriving an analytical solution for pile-head dynamic impedance. Subsequently, Liang et al. [
17,
18,
19,
20] employed the potential function method and the separation of variables method to study the top horizontal impedance of piles with embedded soil plugs, deriving their analytical solutions. Liang et al. [
17] modeled longitudinal vibration in bidirectionally heterogeneous soil, considering lateral inertia and soil disturbance. Meng et al. [
18] applied dynamic Winkler and virtual soil–pile models to floating piles, evaluating incomplete bonding effects. Cui et al. [
19] developed a 3D continuum model for large-diameter pipe piles in radially heterogeneous soil, accounting for vertical wave effects. Liang et al. [
20] addressed soil plug effects in partially embedded piles, deriving horizontal impedance solutions in layered viscoelastic soil. Wang Kuihua et al. [
21], combining the plane-strain model with Laplace transform and impedance transfer methods, derived the dynamic response analytical solution at the top of a wedge pile and validated their computational results through model experiments. Hu Anfeng et al. [
22] used the separation of variables method and the operator decomposition method to derive the analytical solution for the top impedance of wedge piles.
In the above studies, extensive research has been conducted on various pile–soil coupled mechanical behaviors based on Novak’s plane-strain assumption. However, in gas hydrate pilot production using suction pile wellheads with pre-tilted conductors, the presence of the pre-tilted angle introduces longitudinal compressive deformation and friction between soil layers, leading to different mechanical relationship between the pipe and the soil. Additionally, external loads primarily act at the conductor’s bottom. Therefore, existing pile–soil coupling mechanical models are not applicable to suction pile wellheads with pre-tilted conductors.
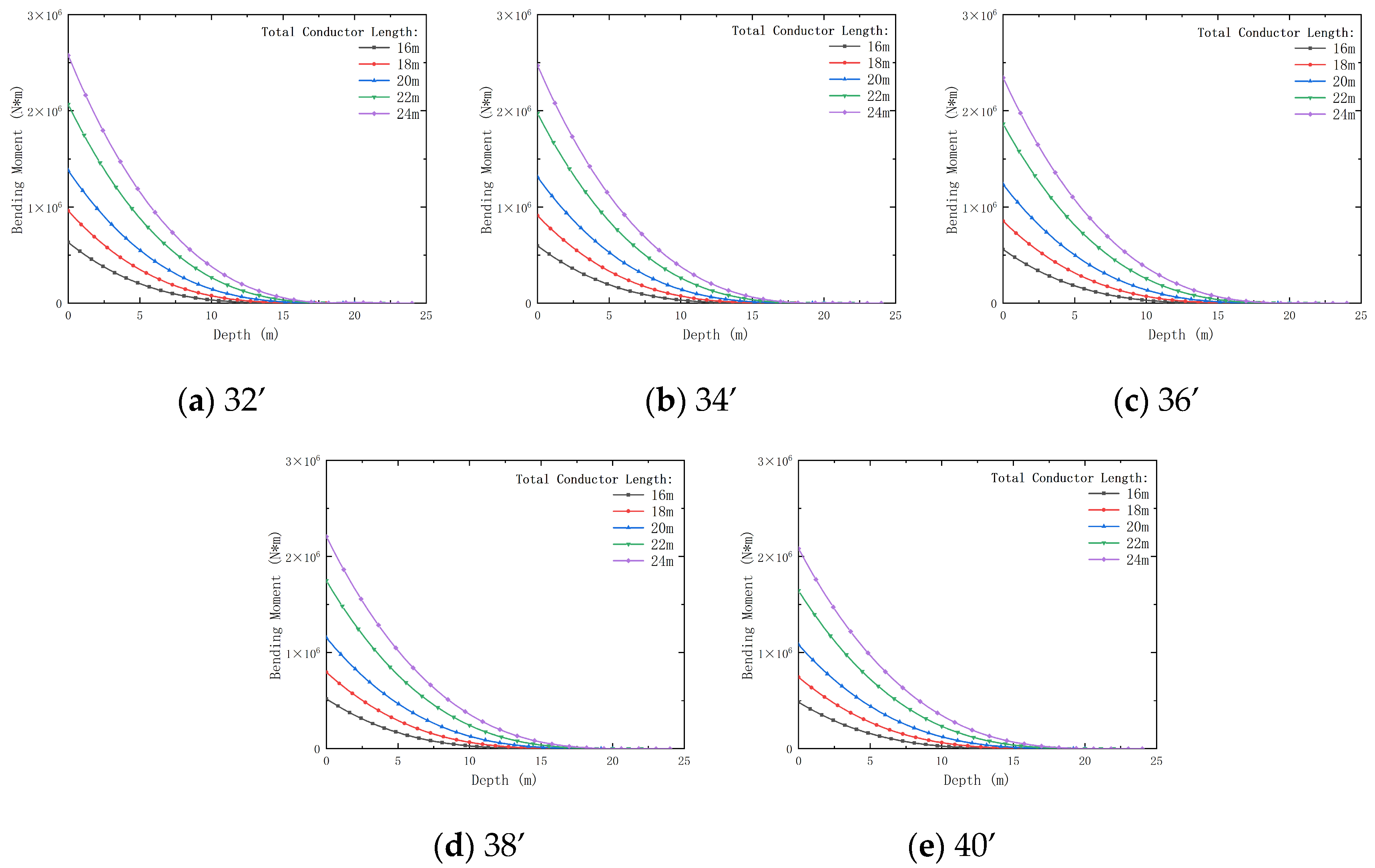
This paper focuses on the structural and operational characteristics of suction pile wellheads with pre-tilted conductors in offshore gas hydrate extraction. Based on Novak’s plane-strain assumption, a vibration control model is established, and multiple mechanical response characteristics of the conductor are derived. A Python numerical calculation program is developed to conduct parameterized studies on the dynamic impact of conductor geometry (e.g., outer diameter, pre-tilted angle) and operating load parameters on the conductor’s mechanical response. This study reveals the deformation characteristics of pre-tilted conductors under complex marine conditions and provides an analytical tool and theoretical foundation for the optimal design of offshore hydrate extraction equipment.
2. Methods
2.1. Model
This study investigates the suction pile wellhead applied in the 2020 offshore gas hydrate pilot production [
1], along with the pre-tilted conductor suction pile wellhead proposed by Wang Lei et al. [
2]. However, compared with the vertical (straight) conductor configuration, the pre-tilted conductor introduces changes in the force distribution due to geometric inclination. For instance, it is subject to higher bending moments, and its deformation leads to compressive interaction with the surrounding soil, affecting the deformation behavior of the conductor. Therefore, based on the mechanical model for the straight conductor, modifications are necessary to account for the geometric and force characteristics of the pre-tilted conductor.
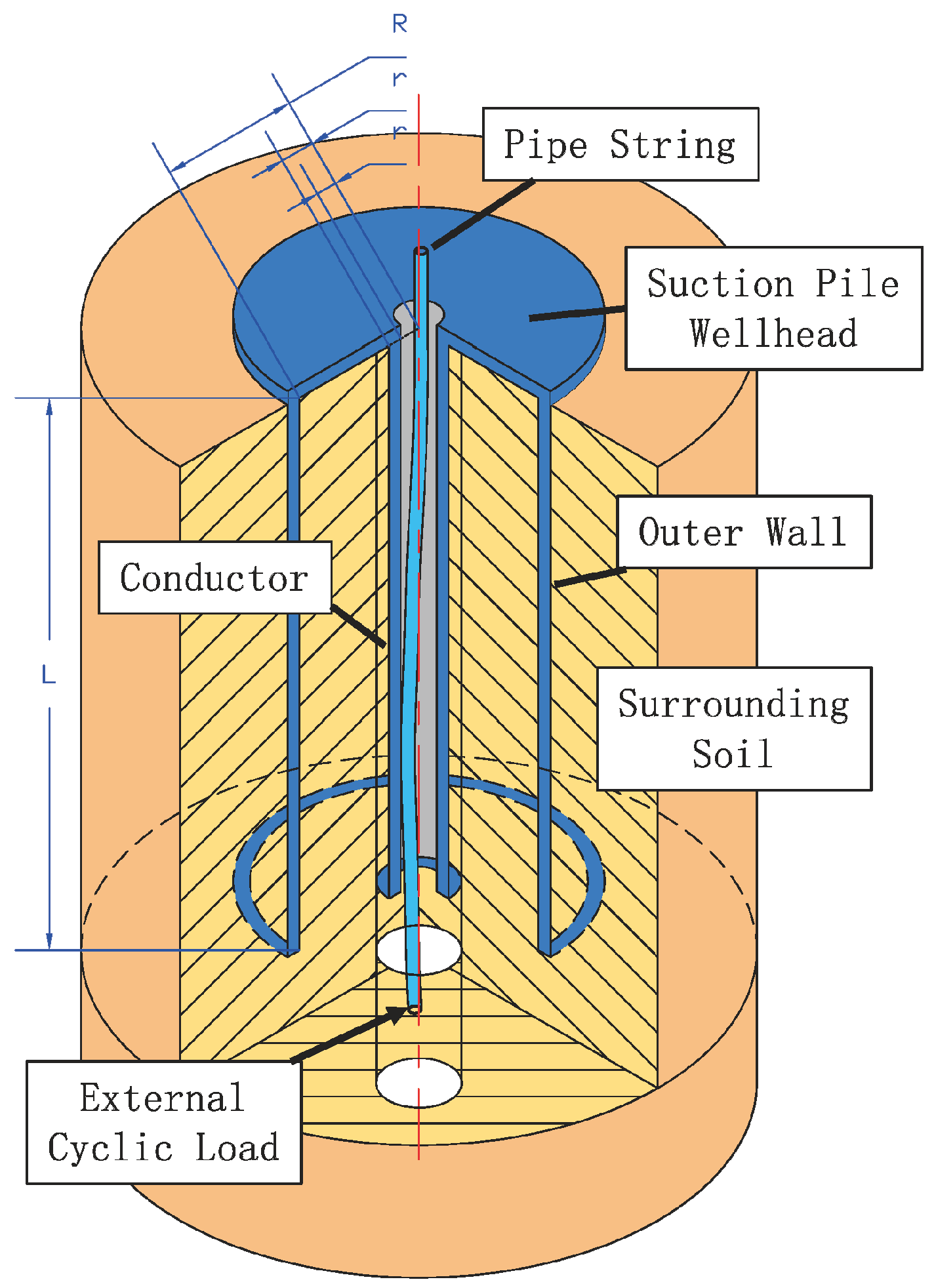
In the simplified physical model under the straight conductor case (
Figure 2), based on Novak’s plane-strain assumption, the soil surrounding the conductor is simplified as a series of infinitely thin, parallel soil layers, with friction and compression between layers ignored. The interaction and contact between the conductor and the surrounding soil are illustrated in
Figure 3. The mechanical model is simplified and assumed as follows [
4,
23]:
- (1)
The suction pile conductor is simplified as an Euler–Bernoulli beam, with horizontal shear strain of the conductor ignored. The top end of the conductor, i.e., the wellhead, is considered as a fixed boundary.
- (2)
The soil layers in contact with the conductor are assumed to be homogeneous, isotropic, and viscoelastic, following Novak’s plane-strain assumption.
- (3)
The interface between the conductor and the soil is assumed to be in perfect contact, with no slip. The vibration type is considered to involve small deformations, with vertical displacements of the soil ignored.
Based on these assumptions and considering the viscoelastic properties of the materials and dynamic loads, the governing equation for the soil in each sub-layer can be obtained [
20].
In this context, and represent the Lamé constants of the -th soil sub-layer, which describe the elastic properties of the soil. These parameters are given by and , where , , and are the Poisson’s ratio, shear modulus, and damping ratio of the -th soil sub-layer, respectively. The parameter denotes the outer diameter of the conductor, while and represent the radial and circumferential displacements of the -th soil sub-layer. Additionally, denotes the density of the -th soil sub-layer.
Considering the elastic deformation of the conductor, inertial forces, and soil damping, the horizontal vibration control equation [
20] for the suction pile conductor in the
-th sub-layer can be expressed as:
where
represents the horizontal displacement of the conductor in the
-th sub-layer,
is the shear modulus of the conductor, and
is the moment of inertia of the conductor cross-section, given by
. The parameter
represents the mass per unit length of the conductor in the
-th sub-layer, given by
, and
denotes the amplitude of the horizontal force exerted by the surrounding soil on the conductor in the
-th sub-layer.
To establish the mechanical model for the pre-tilted conductor, the straight conductor in the physical model shown in
Figure 2 is replaced with a pre-tilted conductor, resulting in the updated physical model shown in
Figure 4. Based on this modification, the simplifications and assumptions of the mechanical model are revised as follows:
- (1)
Since the deformation of the pre-tilted conductor falls within the small-deformation range, and the cross-section remains planar, the pre-tilted conductor is still simplified as a Euler–Bernoulli beam, with horizontal shear strain ignored. The top end of the conductor (i.e., the wellhead) is treated as a fixed boundary.
- (2)
The soil layers in contact with the conductor are assumed to be homogeneous, isotropic, and viscoelastic.
- (3)
The interface between the conductor and the soil is assumed to be in perfect contact with no slip, and the vibration type is considered to involve small deformations.
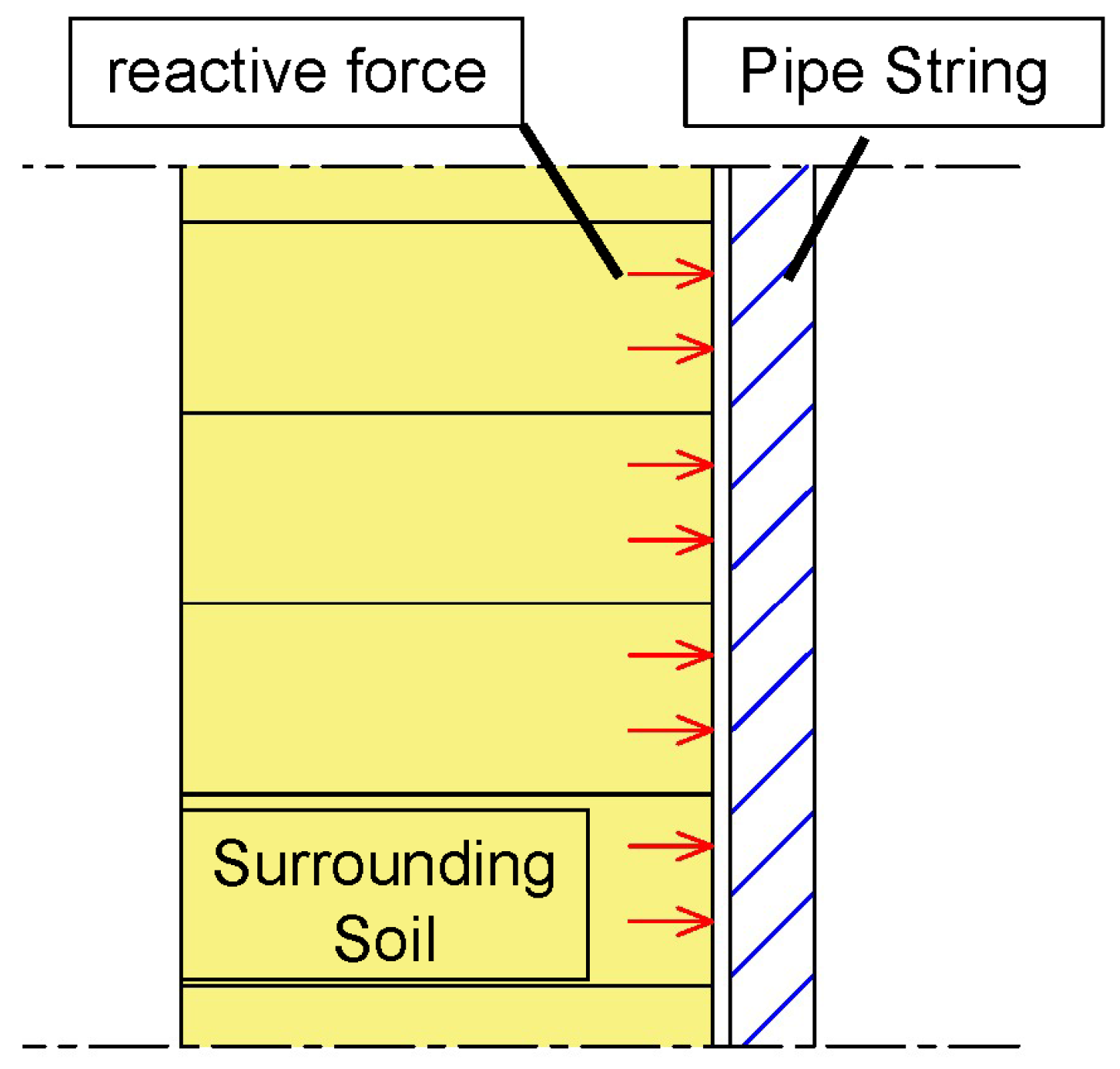
Based on the above assumptions and the physical model, the contact form between soil layers can be simplified as shown in
Figure 5. As the contact depth increases, the inclination angle of the pre-tilted conductor also increases, thereby altering the contact angle between the conductor and the surrounding soil. This, in turn, changes the interaction forces between soil layers, leading to friction or compression effects.
Under the combined influence of the loading angle and the deformation tendency of the conductor, the force directions vary among different soil layers. Consequently, the vertical force components between layers differ, resulting in uneven load distribution in the vertical direction. This leads to mutual compression and friction between the soil layers. Therefore, the existing theoretical model is optimized to account for these effects.
After replacing the straight conductor with a curved pre-tilted conductor, the nonlinear effects of the load increase, leading to changes in stress and strain.
For the governing equation of the soil, since the conductor is now curved, the geometric characteristics of the bent conductor must be considered. Additionally, the normal force component of the interaction between the conductor and the soil introduces interlayer friction. The equation can be simplified as:
where
represents the vertical component of the force exerted by the conductor on the soil, and
, where
is the lateral soil stiffness per unit length reflecting the soil’s resistance to conduit displacement.
The equation for radial strain is given by:
Correspondingly, the equation for tangential strain is:
The vertical force component can be derived from the additional stress induced by the curved conductor:
where
represents the bending radius of the conductor.
Thus, the governing equations for the radial and tangential behavior of the
-th soil sub-layer surrounding the conductor can be rewritten as:
For the vibration control equation of the conductor, a bending moment term is introduced to describe the working state of the conductor, based on the original vibration control equation. By ignoring the influence of initial additional bending moments, the curvature-related calculations yield the following:
To model the vibration of a pre-tilted conductor, the vibration control Equations (8) and (9) are simplified to a beam model along the
z-axis. Because the conductor is slender, the radial and tangential displacements (
,
) have negligible contributions to the z-direction vibration, which is dominated by the axial displacement. Based on Euler–Bernoulli beam theory, a bending moment term is introduced to describe the distributed external force along the conductor length. Initial additional bending moments are neglected due to their minimal impact on the dynamic response. Through curvature-related calculations, the bending moment expression is derived as follows:
where
is the amplitude of the external load applied at the conductor’s end and
is the total length of the pre-tilted conductor.
Using the bending moment in Equation (10), the vibration control equation for the pre-tilted conductor is derived based on Euler–Bernoulli beam theory. Substituting into the beam equation and incorporating damping and external force terms, the modified vibration control equation is obtained as follows:
2.2. Boundary Condition
The boundary conditions for the pre-tilted conductor, compared to a straight conductor, are defined as follows, reflecting the engineering constraints and soil interaction in the system:
At the top of the conductor (at
), the conductor is rigidly fixed at the wellhead, preventing axial displacement or rotation. This condition reflects the engineering constraint of a secure connection between the conductor and the wellhead structure. Therefore:
At the bottom of the conductor (at
), the boundary conditions are governed by the concentrated stress from the internal pipe string only, and there are no bending moment at the bottom, consistent with the mechanical setup of a pre-tilted conductor under concentrated loading. Thus:
Surrounding Soil: Assuming perfect contact between the conductor and the surrounding soil, the radial and tangential displacements (
and
) of the
-th soil sub-layer at the conductor’s external wall (at
) are coupled with the conductor’s radial displacement (
). Thus:
At infinity distance from the conductor (at
), the radial and tangential displacements of the soil are zero. This condition reflects the physical attenuation of vibrational disturbances in the soil medium, ensuring no residual motion far from the conductor. Therefore:
where
represents the radial offset caused by the initial curvature of the conductor. Its value can be calculated based on the pre-tilted angle and the conductor length.
2.3. Solution
The model is solved analytically using the potential function method, selected for its effectiveness in handling complex boundary conditions and deriving closed-form solutions for vibrational problems. Compared to numerical methods (e.g., finite element analysis), the potential function method offers lower computational cost and directly yields interpretable analytical expressions, which are advantageous for analyzing the pre-tilted conductor’s dynamic response. Additionally, this method excels in decoupling radial and tangential displacements in polar coordinates, as required by the soil–conductor interaction. Through variable separation, displacement potential functions
and
are introduced, defined as follows:
By substituting the above into the equilibrium Equations (8) and (9), it can be obtained that:
This can be transformed into the form of a Bessel function of deformation:
Since
is an even function and
is an odd function, the general solution of the above equation is:
where
;
;
is the first-order second-kind Bessel function;
and
are undetermined coefficients.
Substituting this into the equations for
and
gives:
Using the matrix solution method, the system of equations can be rearranged as:
After expanding, the calculation formulas for
and
can be derived:
Based on the values of
and
, the normal force acting on the
-th segment of the pile due to the surrounding soil is:
where
is the tilt angle of the
-th segment of the conductor.
Substituting the above expression into the pile head boundary condition gives:
where
.
The horizontal displacement amplitude of the -th sub-layer of the conductor is , with =.
According to the general solution of Equation (28), it can be obtained that:
where
,
,
, and
are undetermined coefficients.
Similarly, the expressions for the rotation angle
, bending moment
, and shear force
of the
-th sub-layer of the conductor can be derived:
Substituting Equations (29) and (30) into the boundary condition (13) yields:
Solving the above equations leads to the following calculation formula of
:
According to the literature [
19], the horizontal impedance at the bottom of the suction pile conductor
, the dimensionless coefficient
, and the damping coefficient
can be expressed as:
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}