1. Introduction
Enhancing drilling efficiency to reduce operational costs has been a longstanding challenge in petroleum engineering. Central to this effort is the optimization of the rate of penetration (ROP), which is largely governed by surface-controlled parameters such as the weight on bit (WOB) and rotary speed (RPM). Historically, numerous approaches have been developed to simulate and optimize the ROP, including physics-based models grounded in rock mechanics and dynamics [
1,
2] as well as data-driven models employing machine learning (ML) techniques to capture complex subsurface behaviors [
3,
4].
Among the data-driven approaches, artificial neural networks (ANNs), support vector machines (SVMs), and tree-based ensembles have shown strong predictive capabilities for the ROP under various lithologies and operating conditions [
5,
6]. These ML-based models are often coupled with metaheuristic optimization algorithms, such as Genetic Algorithms (GAs), Particle Swarm Optimization (PSO), and Differential Evolution (DE), to determine optimal parameter combinations [
7,
8]. Elkatatny [
9] applied PSO to fine-tune an SVM-based ROP predictor, achieving a higher correlation with field data and faster convergence compared to a standard grid search. Similarly, Almomen et al. [
10] extended this approach to an ANFIS/SVM hybrid in horizontal drilling, using PSO to optimize membership functions and kernel parameters, which improved the prediction accuracy under unconventional reservoir conditions. Kenioua and Djebili [
11] demonstrated PSO’s versatility by coupling it with an Extreme Learning Machine (ELM) for ROP optimization, suggesting a potential for PSO-enhanced tree-ensemble tuning. While such hybrid approaches have improved the drilling performance, they often overlook the negative impact that aggressive parameter sets can have on downhole dynamics—particularly drill string vibrations.
Drill string vibrations, including stick-slip, lateral, and torsional oscillations, are common dysfunctions that severely reduce drilling performance, increase tool wear, and damage equipment [
12,
13]. Recent studies have attempted to address these dysfunctions using vibration classification models trained on field data. For instance, Hegde et al. [
14] proposed deep learning-based vibration detection for drilling advisory systems, and ExxonMobil’s DAS system attempts to optimize the ROP while mitigating stick-slip via real-time monitoring [
15]. However, these methods primarily focus on vibration identification and classification, rather than directly controlling the mechanical sources of vibration like torque fluctuation and the depth of cut.
Moreover, vibration mitigation in these systems is often achieved by reducing the WOB or RPM—an approach that lowers the ROP and contradicts the goal of performance optimization. The importance of minimizing torque fluctuation, as a means to ensure a dynamic BHA stability and suppress vibration generation, has been recognized in recent physics-based research [
16,
17]. However, to date, no academic study has successfully implemented a strategy that uses AI-driven regression modeling to actively determine optimal setpoints (WOB and RPM) for torque management, rather than merely classifying or reacting to vibration signatures.
In our recent work [
18], we introduced a real-time hybrid workflow combining ML and physics-based modeling for ROP optimization. Building upon that foundation, the present study takes a significant step forward by indirectly integrating torque management into the optimization objective—resulting in a dual-purpose AI framework that both maximizes the ROP and mitigates downhole vibrations by learning optimal parameter relationships.
The key innovation of this work lies in its AI-driven approach to torque management, which identifies drilling setpoints that minimize vibration-inducing dynamics and increase the rate of penetration (ROP). This represents a methodological advancement that moves beyond classification-based strategies and addresses a significant gap in the current academic literature.
2. Materials and Methods
2.1. Process Description
Well drilling is the activity of connecting the bottom reservoir with the surface using a drilling rig and auxiliary pieces of equipment. The top drive is used to rotate the cutting device and the drill string from the surface. Mud pumps inject high-pressure drilling fluid through the hollowed drill string to the bottom to lubricate the bit, maintain the wellbore, and carry cutting to the surface through the annulus. The drill string is a set of drill pipes and the bottom hole assembly (BHA) screwed together by tool joints. The BHA consists of drill collars for applying the effective parameter (WOB) by compression, the heavyweight drill pipe for geometry transition, bottom measuring tools, stabilizers, and a PDC (
Figure 1).
The drill string vibration is one of the limiters that prevent boosting the drilling efficiency and, at the same time, leads to drill string failures. These vibrations are due to the non-linear bit–rock interactions, the mass imbalance within the wellbore, the mismanagement of drilling parameters, downhole motors, high friction, and a poor BHA or bit selection [
19]. Optimizing the drilling process to enhance efficiency requires a valuable vibration mitigation scheme.
2.2. Data Collection
Real-time monitoring systems, typically connected to surface sensors, enable the continuous supervision of rig equipment and drilling parameters. In this study, high-frequency data were acquired at 0.5 Hz, resulting in approximately 388,800 to 604,800 data points per 16” section in the same field, which allowed for the detailed analysis of the dynamic drilling behavior.
The data underwent several preprocessing steps to ensure quality and consistency:
Noise Filtering: Signal distortions due to non-linear friction, buoyancy, and turbulent flow were smoothed using window-based filters.
Outlier Removal: Unrealistic spikes caused by sensor errors or irregular operations were detected using statistical thresholds and removed from the dataset.
Operational Mode Segmentation: Data were classified into bit Onbottom and bit Offbottom operations.
The dataset was collected from an Algerian onshore field, focused on a 16” intermediate section drilled with a packed BHA including three stabilizers. This interval provided an operational consistency and variability suitable for training and validating the models.
Key parameters such as the depth, WOB, RPM, ROP, SPP, torque, hook load, and flow rate were used as inputs to develop machine learning models for predicting both the ROP and surface torque.
2.3. Machine Learning
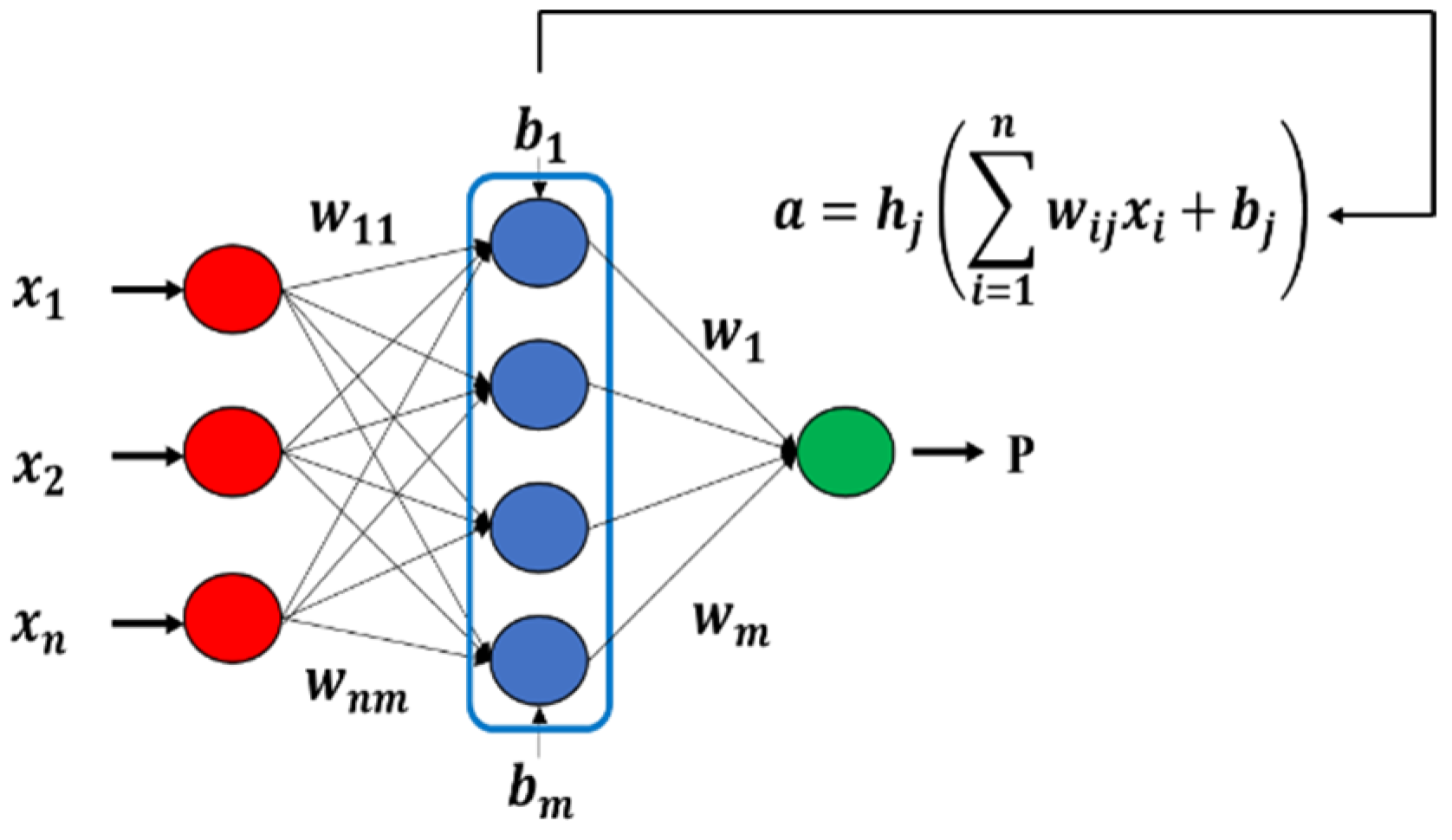
In the present research, multilayer perceptron (MLP) with non-linear mapping is considered to predict the rate of penetration (ROP) and the surface drilling. Multilayer perceptron model is a practical branch of artificial intelligence (AI) developed to tackle the problems with non-linear inputs and outputs [
14]. The configuration of multilayer perceptron includes three main layers: input and output layers and one or more hidden layer(s) (
Figure 2). A correlation between input and output parameters is simulated in the hidden layers. The total hidden layers and the number of neurons in each layer must be optimally selected as an acceptable value of the error between the real and predicted ROP [
20]. In each neuron, the input values are multiplied by the weights and summed to a value called the bias. Then, the result is transformed through a function called the activation function. Outputs of each layer are employed as inputs for the next layer [
21]. The MLP output can be explicated as follows:
where
: the drilling parameters (WOB, RPM, SPP, Q, …);
, : correlation weights;
: the bias coefficients for the ith neuron;
: is the activation function.
Several forms of the transfer functions can be considered, such as the sigmoid, Gaussian function, and linear function [
22].
In this study, the Levenberg–Marquardt backpropagation algorithm is commonly exploited for training the MLP model.
2.4. Artificial Neural Network Model Development and Results
Initially, the data consisted of all drilling operations performed in the 16-inch hole section, including making connections, tripping, and drilling new footage. For this, data filtration was performed by removing all unnecessary operation activities. The overfitting of data is avoided by splitting the data randomly into a training set and testing set. The modeling process was trained considering 80% of the inputs. The other 20% was selected as the testing set to evaluate the ability of the developed model to be exploited. During the modeling optimization processes, the ideal number of neurons was 23 for the ROP model and 27 for the torque model. The best training function was the Levenberg–Marquardt backpropagation algorithm, and the best transfer function was the Tansig function. The optimum parameters of the model were selected based on the recorded values of both the coefficient of determination and the root mean square error (RMSE).
The models’ performance for the ROP and surface torque was estimated using two metrics, RMSE and R, as stated by Laalam et al. [
23], which can be calculated as follows:
where
N is the samples’ dataset number;
is the desired output;
is the predicted output;
is the average of the desired outputs.
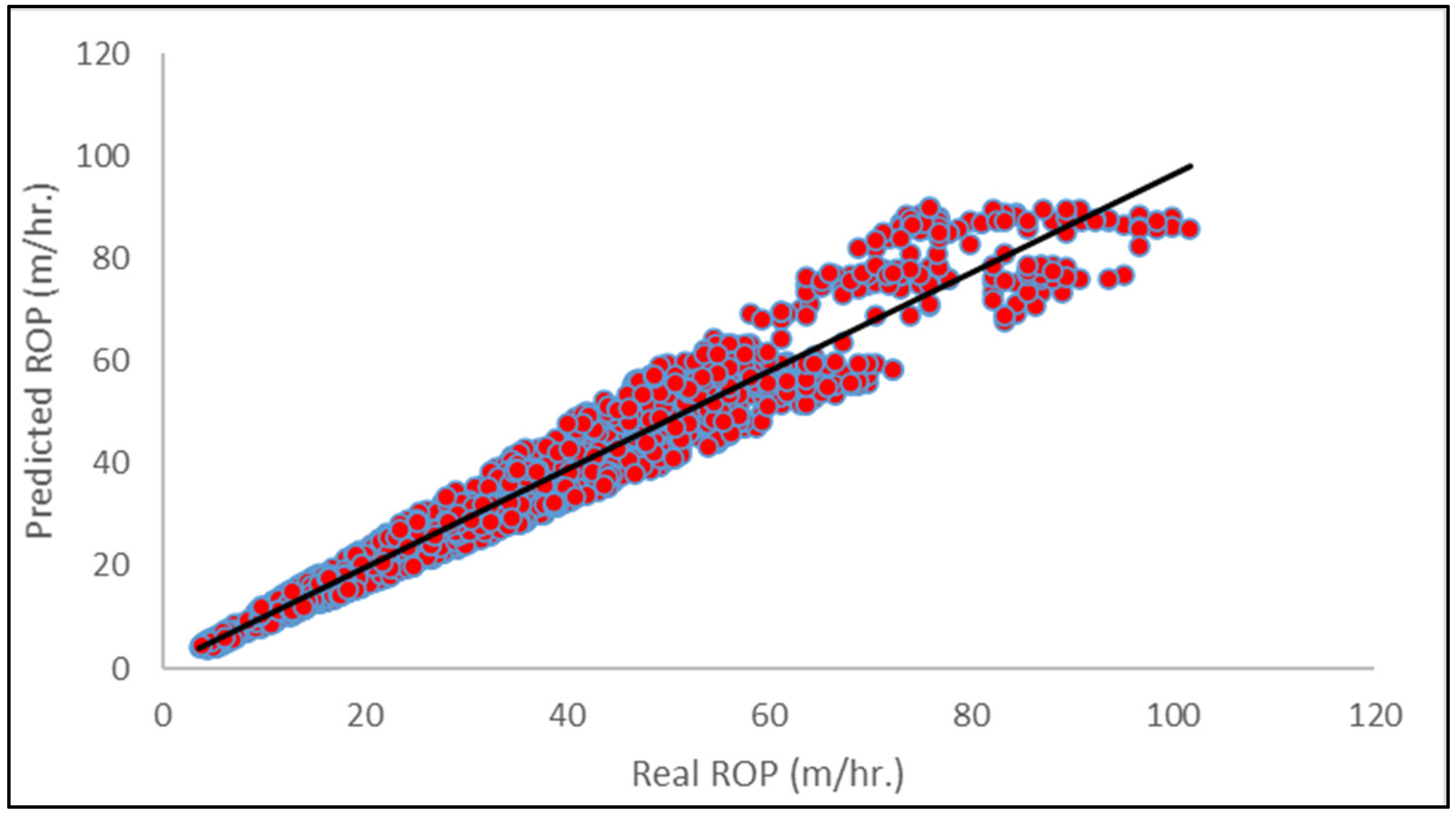
The developed ROP and torque models were used to determine the optimal mechanical drilling parameters (WOB/RPM) for improving the ROP and minimizing torque fluctuation.
Figure 3 shows the cross-plot for the ROP model. The ANN method assumes less than 9.57 of the average absolute related error as cited in
Table 1.
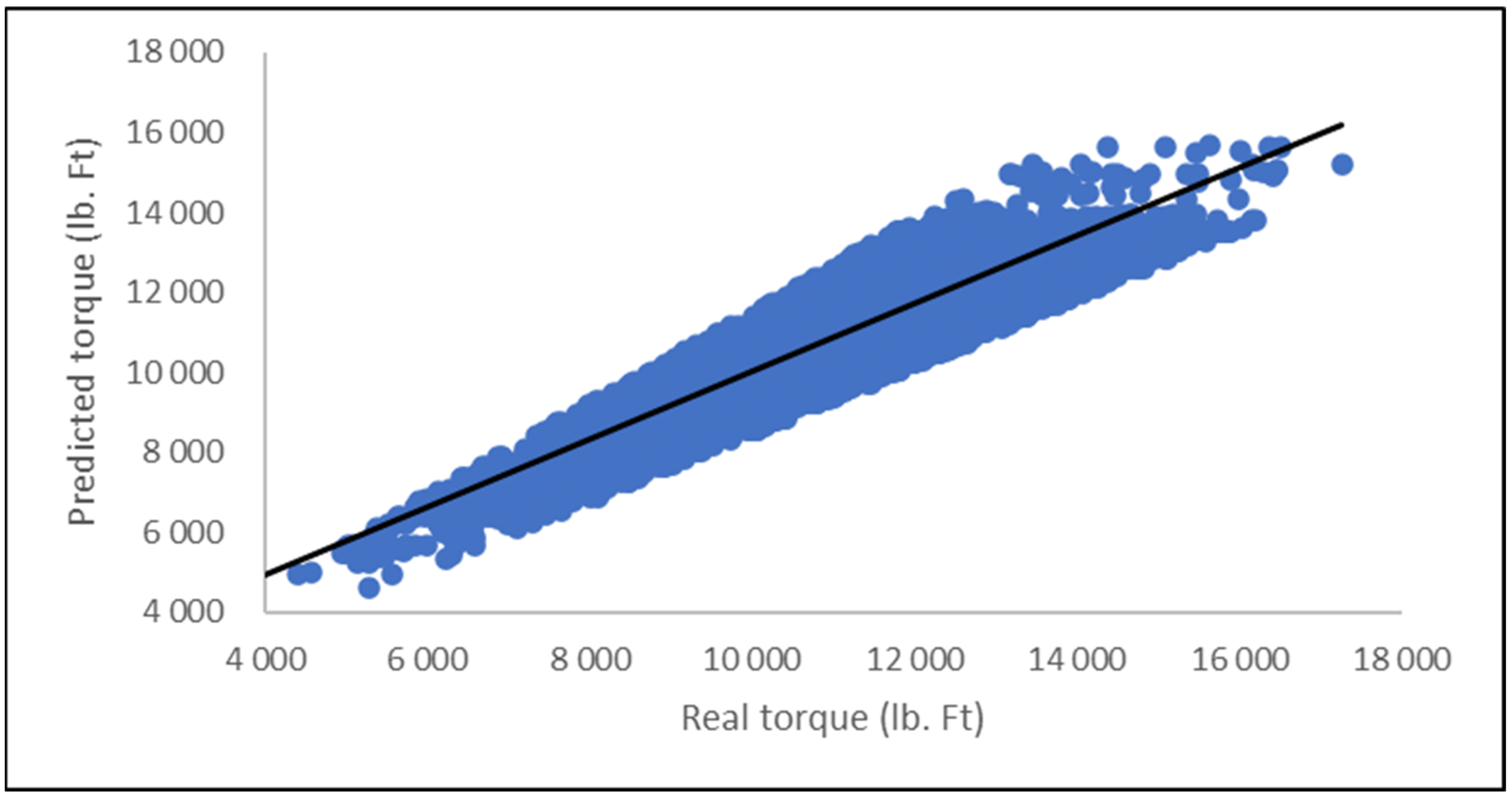
The torque model is used to find new torque after the optimal parameters are found, which will be used to find the new ROP (after optimization).
Figure 4 represents the cross plot for the validation of the torque model; the limitation has appeared, and a slight deviation from the unit line is observed as the modeling strategy used the minimum drilling parameters to have operational impact and high computational efficiency. Also, the torque model outcomes will confirm only the reduction in the torque fluctuation. The R square (0.9) show an acceptable value to use the model as cited in
Table 1.
2.5. Optimization Algorithms: Metaheuristic Differential Evolution Algorithm (DE)
Metaheuristic optimization algorithms have become desirable and efficient compared with exact optimization algorithms [
24]. The approximate hybrid metaheuristic systems can locate high-quality solutions to various practical problems within a reasonable computation time. Many optimization issues have been addressed using different evolutionary algorithms, such as Genetic Algorithms (GAs) and Particle Swarm Optimization (PSO). An optimized combination of the GA and simulated annealing (SA) has also been used in the design and synthesis of heat exchangers [
25] and predictive controllers [
26]. This paper employs the Differential Evolution (DE) algorithm to optimize the drilling process. DE is a stochastic algorithm developed by [
27]. DE’s optimization process is similar to the GA’s in that it uses the same operators viz selection crossover and mutation. Unlike the GA, which is based chiefly on crossover, DE is mainly based on the mutation and the selection operators to guide the search strategy towards the potential zones in the search area. DE begins the optimization process by creating a population of m possible solutions described by d dimensional vectors
. The following steps are used to adjust these vectors:
Mutation: for the
generation and the
vector, the mutation mechanism modifies the parent vector
to generate a mutant vector
as described in the following equation [
27]:
where k1, k2, k3, and
are selected randomly to pick three individuals from the previous population.
is the mutation factor that controls the differential variation amplification. Its value varies from 0 to 2. The obtained vector
is known as the donor vector.
Crossover: in this phase, the parent vector
and the donor vector
are combined according to the crossover probability (
CR) to generate a trial vector
, as shown below [
27]:
where
and
are chosen randomly in the intervals [1, d] and [0, 1].
Selection: the best vector is chosen as illustrated below:
where
represents the fitness function.
These steps are executed iteratively until the termination criteria are met.
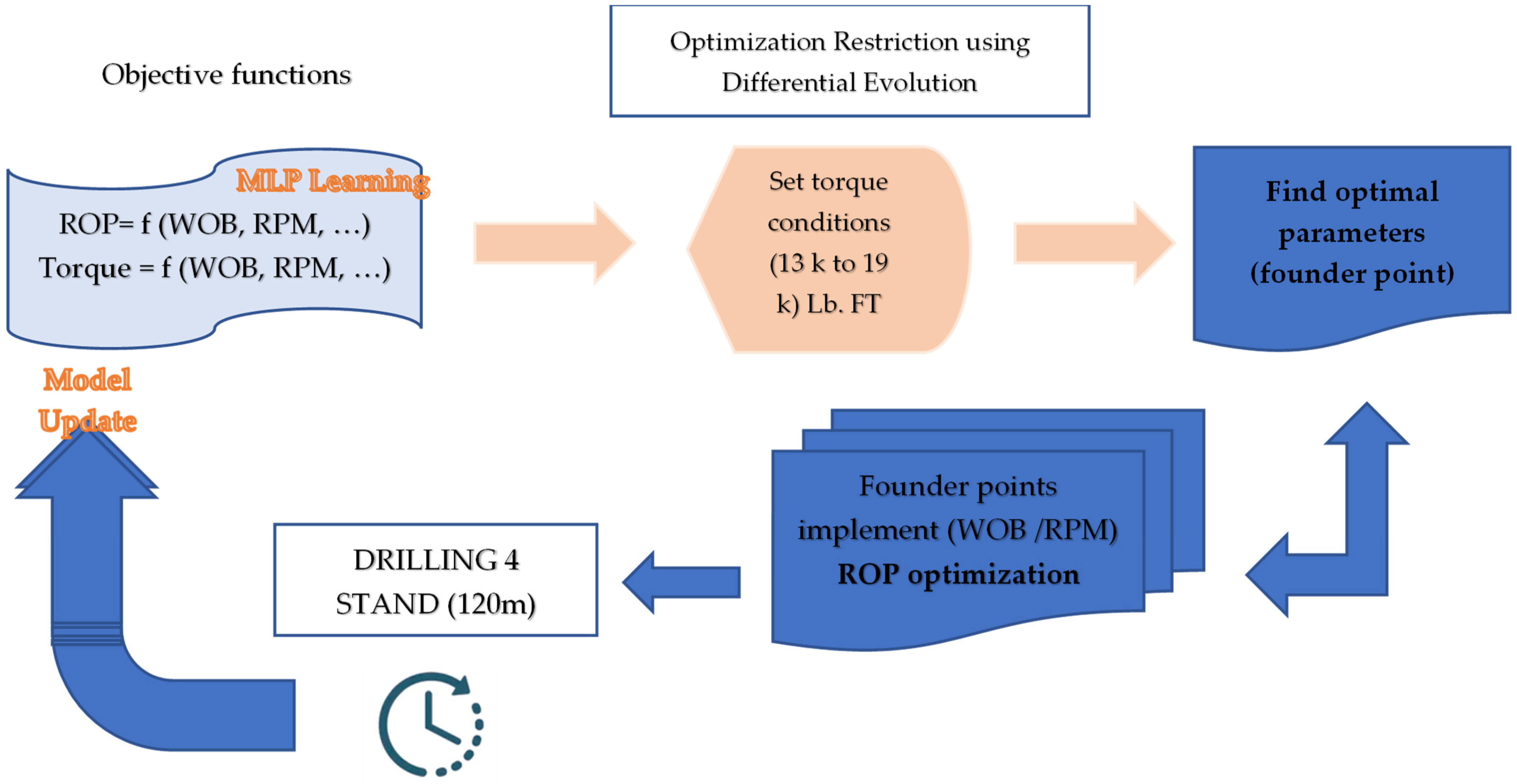
2.6. Model Update and Materials
Once the recommended parameters are implemented, the process is repeated to update the ROP model with the new training data acquired while drilling the last four stands (120 m) and find the ideal RPM and WOB values for the next section (second optimization phase). This closed-loop procedure is repeated until the drilling of the entire formation is complete.
Figure 5 depicts the flowchart of the suggested drilling optimization strategy.
The execution time of this cycle depends on the computational resources. It was less than a minute to complete this process (modeling and optimization) on a 16 GB RAM laptop computer with an Intel 7th Generation i7-7500U CPU @ 2.70 GHz. With this computational capacity, the ROP model can be retrained and optimized to select the best operational parameters every minute, but changing the drilling parameters often would be unrealistic in practice. For this, the frequency of the model update is set at the time required to drill a stand. However, the ROP model can be retrained at any time, even before drilling the entire interval. If the driller finds that the vibrations are too high or the torque increases sharply, it is necessary to modify these parameters.
Torque management plays a crucial role in reducing downhole vibrations by maintaining the depth of cut within an optimal range, under a fixed WOB and RPM. The key mechanism involves controlling the reactive torque, which directly influences both torsional and axial vibrations. When drilling, excessive reactive torque, typically during the stick-slip phase, causes torsional vibrations, leading to high fluctuations in the ROP and the unpredictable behavior of the bit. By carefully managing the torque within a predefined drilling limit as cited in
Table 2, typically set between 13,000 Lb. Ft (minimum) and 19,000 Lb. Ft (maximum), the system ensures that the bit does not penetrate too deeply into the formation, thus avoiding situations where the reactive torque exceeds the drilling limit. This helps maintain a constant depth of cut while preventing the bit from becoming stuck or over-penetrating during the stick phase. At the same time, during the bit bounce or axial vibration phase, torque management ensures that the bit does not lose contact with the formation. The system’s ability to keep the torque within a narrow fluctuation range prevents lateral vibrations, reduces the impact of vibration-induced wear on the bit, and results in smoother, more consistent drilling. This stable environment allows for higher efficiency in drilling without compromising the structural integrity of the wellbore.
3. Results and Discussion
A case study is provided to show how this optimization strategy may be used in drilling practice. The data were recorded during the drilling of a vertical well in an Algerian field. Due to the presence of several geological intercalations, the drilling of intermediate section 16 is always accompanied by the generation of severe vibrations
The downhole vibrations are directly related to the depth of cut and the reactive torque. During severe torsional vibrations (stick phase); the cutters are deeply penetrated in the formation and the reactive torque is higher than the drilling limit torque (20k Lb. Ft), which requires less axial forces (decrease the WOB) to cease the reactive torque and determine the maximum depth of cut. In this case, an irregular RPM is witnessed (
Figure 6A), and sharper values are expected during the slip phase. In the present dataset, the rotation drops from ~140 RPM to 60 RPM whenever stick-slip is triggered.
However, the bit cutters cannot even penetrate the borehole during the axial vibrations (bit bounce), in which a higher WOB is expected to pierce the rocks and avoid the wellbore wall enlargement that leads to lateral vibrations. The torque is low (generally less than 3k Lb. Ft) as the cutters are not in action, and a minimum depth of cut is required. A high WOB fluctuation is seen in the weight indicator during this vibration, as shown in
Figure 6B Field logs show swings in the WOB (≈±4–5 t) within 10 s, a clear bit bounce signature.
The artificial neural network model provides the optimal drilling parameters after the training during the first stand drill.
Figure 6 presents the optimal RPM and WOB while applying the torque condition for avoiding harmful drilling vibrations. As shown in
Figure 6, the system provides stable parameters, and the optimal WOB/RPM determined by or dependent on the collection or analysis of data is different from the real WOB/RPM selected in the drilling program. Specifically, the ANN recommends roughly a 2 to 4 t (15 to 25%) lower WOB and maintains 100–145 RPM. The orange “step” profile in both traces is deliberately flat: once a lithology change is detected, the model locks a new setpoint for several meters, giving the autodriller time to react and preventing control-loop hunting.
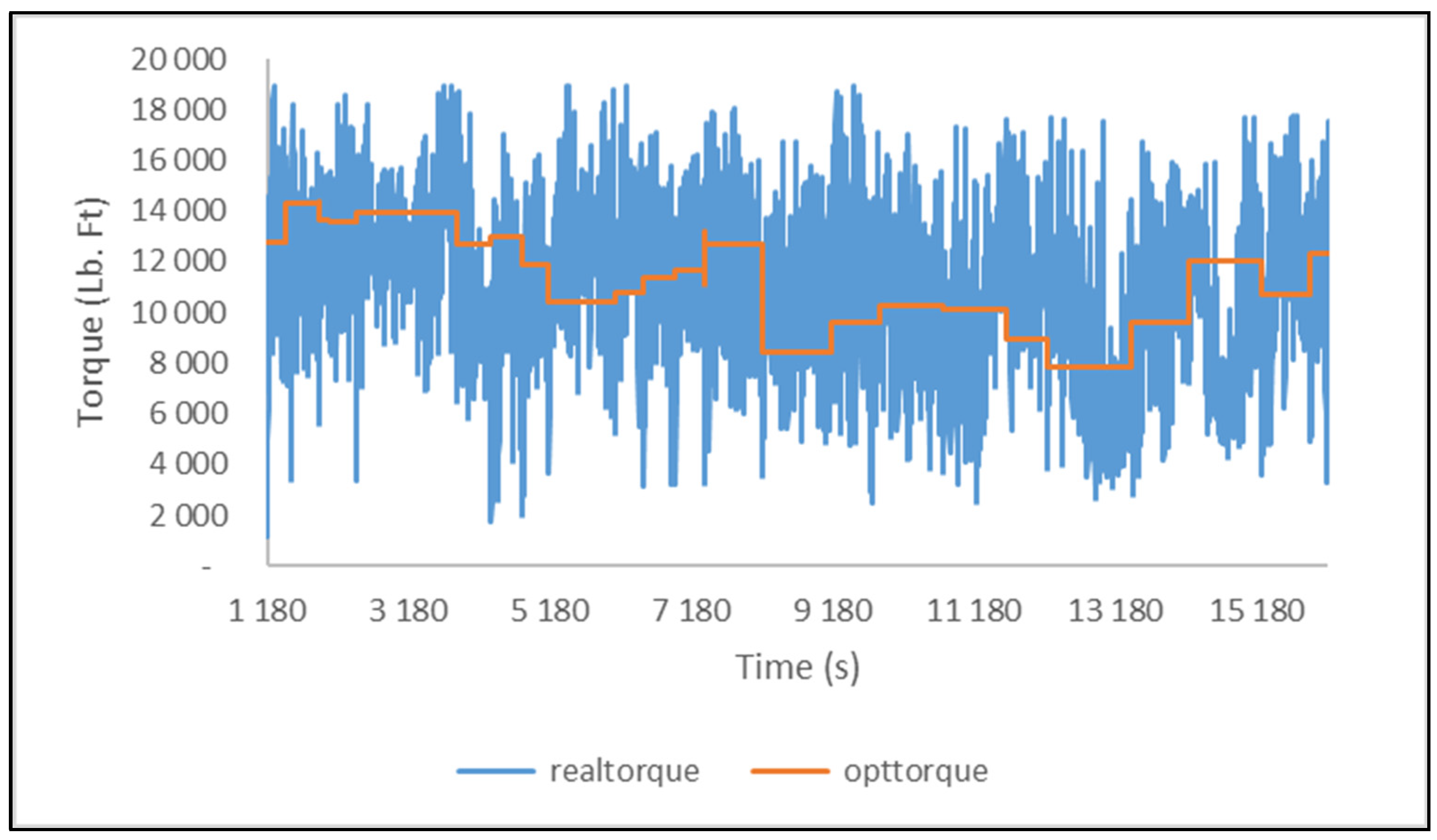
To control the depth of cut, the torque fluctuation interval must be managed without reaching the drilling limit torque to avoid torsional vibrations. Keeping the depth of cut at an acceptable range will result in a minimum torque fluctuation, leading to the mitigation of downhole vibrations. The drilling limit torque is selected based on the pipe’s type and torsional strength, generally 20,000 Lb. Ft in Algerian fields. As seen in
Figure 7, applying the obtained optimal parameters reduced the torque fluctuation and managed a constant torque interval.
The optimized ROP is greater than the actual ROP in several periods (
Figure 8). Results indicate that the implementation of the optimized WOB and RPM values (values obtained using the DE algorithm) provide an average ROP improvement of 56% (average real ROP = 29/Opt ROP = 56).
These results demonstrate that torque management enhances dynamic stability for a successful system deployment. The control of the depth of cut improves the ROP through the enhancement of the drilling efficiency and dynamic stability. Below are the results based on based on the formation type as shown in
Table 3 and based on the offset wells (
Table 4)
A statistical analysis was performed to validate the significance of the ROP improvements achieved through the optimization strategy. The results from 10 wells showed an average ROP increase of approximately 56%, with a low standard deviation of 1.1%, indicating consistent improvements across the dataset. A paired sample t-test was conducted to compare the old and optimized ROP values, resulting in a t-statistic of 16.89 and a p-value less than 0.0001. These results confirm that the improvement is statistically significant at a 95% confidence level, and the likelihood of the results occurring by chance is extremely low. Therefore, the optimization approach reliably enhanced the drilling performance by significantly increasing the ROP while maintaining operational stability.
4. Model Limitation
The proposed methodology demonstrates a strong performance under controlled conditions; however, its scalability and generalization remain limited. The model is tailored for vertical well sections with specific drilling assemblies, and its applicability to horizontal or deviated wells is constrained due to the complex dynamics introduced by rotary steerable systems (RSSs) or downhole motors. These tools introduce additional torque behaviors and vibration patterns not captured in the current framework. Consequently, extending the approach to different well trajectories or geological settings would require model recalibration and retraining. Additionally, the success of the optimization relies heavily on high-quality sensor data with sufficient frequency and accuracy—common challenges in real-world drilling operations. As with any AI-driven solution, robust data preprocessing and continuous model validation are essential to ensure reliability across varying operational contexts.
5. Conclusions
In this paper, a multilayer perceptron hybridization has been applied for the continuous learning of drilling parameters. Separate models have been built individually to estimate the rate of penetration and torque. After the training, the ROP model has been coupled with a metaheuristic optimization algorithm (Differential Evolution) to minimize the torque fluctuation (torque management), which controls the depth of cut to mitigate downhole vibrations.
This methodology has shown great competence in finding optimal drilling parameters for the best drilling scenario (optimal ROP). Optimal parameters have been implemented, and the ROP has increased by an average of 56% for the dataset used.
Drilling process optimization and vibrations control methods based on torque management are worthy of being applied and promoted with a high diagnostic accuracy, effective optimizing, and simple operations to improve the ROP and mitigate downhole vibrations.
Future work will focus on extending the methodology to horizontal and deviated wells, where different downhole tools introduce additional dynamics. Incorporating downhole vibration data and adapting the model to various well trajectories will enhance its robustness. Comparative studies with other optimization algorithms like Genetic Algorithms and PSO are also planned. Additionally, integrating an uncertainty analysis and developing a real-time adaptive system will support a broader field deployment and more resilient decision-making.
Author Contributions
Conceptualization, F.S.B.; Methodology, F.S.B.; Software, F.S.B.; Formal analysis, M.R.Y.; Investigation, M.R.Y.; Writing—review & editing, H.O.; Supervision, A.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Please note that the field data used in this study are proprietary and confidential, and have been used with permission solely for research purposes.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bourgoyne, A.T.; Millheim, K.K.; Chenevert, M.E.; Young, F.S. Applied Drilling Engineering; SPE Textbook Series; Society of Petroleum Engineers: Calgary, AB, Canada, 1986. [Google Scholar]
- Detournay, E.; Defourny, P. A model for the drilling response of drag bits. Int. J. Rock Mech. Min. Sci. 1992, 29, 243–252. [Google Scholar] [CrossRef]
- Rasouli, V.; Nikpay, A. Data-driven drilling optimization. J. Pet. Sci. Eng. 2021, 196, 107712. [Google Scholar]
- Liu, Y.; Yang, Z.; Zhang, X.; Li, Z.; Chen, H. ROP prediction using XGBoost and ensemble learning. Energy Rep. 2022, 8, 322–330. [Google Scholar]
- Gao, Y.; Zong, S.; Liang, D.; Zhang, W. ROP estimation in deep wells using neural networks. Pet. Explor. Dev. 2023, 50, 330–338. [Google Scholar]
- Khan, K.; Liu, Y.; Zhang, X.; Wang, H. SVM-based ROP prediction. J. Nat. Gas Sci. Eng. 2021, 87, 103784. [Google Scholar]
- Ali, A.; Nguyen, S.; Saleh, F. DE-ML hybrid optimization for drilling parameters. Energy Exploit. Exploit. 2024, 42, 127–140. [Google Scholar]
- Xu, B.; Zhang, X.; Wang, H.; Guo, Y.; Wang, H. ROP prediction using deep learning. Energy Rep. 2023, 9, 1223–1235. [Google Scholar]
- Elkatatny, S. Real-time prediction of rate of penetration in S-shape well profile using artificial intelligence models. Sensors 2020, 20, 3506. [Google Scholar] [CrossRef] [PubMed]
- Almomen, H.; Mahmoud, A.; Elkatatny, S.; Abdulraheem, A. Predicting the rate of penetration while horizontal drilling through unconventional reservoirs using artificial intelligence. ACS Omega 2024, 9, 49719–49727. [Google Scholar] [CrossRef] [PubMed]
- Kenioua, A.; Djebili, O. Optimizing rate of penetration in drilling operations with metaheuristic algorithm. In Human Interaction & Emerging Technologies (IHIET 2023): Artificial Intelligence & Future Applications. AHFE (2023) International Conference; AHFE International: Orlando, FL, USA, 2023; Volume 111. [Google Scholar] [CrossRef]
- McPheeters, C.; Paxton, H.; Zedalis, P. The impact of vibrations on drilling dynamics. SPE Drill. Complet. 2021, 36, 101–110. [Google Scholar]
- Wilson, B.; Yu, D.; Fu, Z.; Huo, W.; Deng, C. Stick-slip mitigation through parameter control. J. Energy Res. Technol. 2022, 144, 025001. [Google Scholar]
- Hegde, A.; Daigle, H.; Gray, K.; Millwater, H. Vibration Classification Using CNNs in Drilling. SPE Drill. Complet. 2020, 35, 92–103. [Google Scholar]
- ExxonMobil. Drilling Advisory System: Intelligent Optimization Framework. In Proceedings of the SPE/IADC Drilling Conference, Stavanger, Norway, 9–11 March 2021. SPE-201542-MS. [Google Scholar]
- Zhang, X.; Guo, Y.; Li, J.; Wei, S.; Li, Z. Torque fluctuation analysis for BHA stability. Comput. Geosci. 2022, 128, 38–50. [Google Scholar]
- Li, J.; Zhang, X.; Wei, S.; Guo, Y.; Li, Z. Vibration propagation and torque-based control. J. Pet. Sci. Eng. 2021, 196, 107692. [Google Scholar]
- Boukredera, F.S. Enhancing the drilling efficiency through the application of machine learning and optimization algorithms. Eng. Appl. Artif. Intell. 2023, 127, 107686. [Google Scholar] [CrossRef]
- Eren, T.; Ozbayoglu, M.E. Real-time optimization of drilling parameters during drilling operations. J. Pet. Technol. 2010, 62, 111–119. [Google Scholar]
- Hegde, C.; Daigle, H.; Millwater, H.; Gray, K. Analysis of Rate of Penetration (ROP) prediction in drilling using physics-based and data-driven models. J. Pet. Sci. Eng. 2017, 159, 295–306. [Google Scholar] [CrossRef]
- Youcefi, M.R.; Hadjadj, A.; Bentriou, A.; Boukredera, F.S. Rate of Penetration modeling using hybridization extreme learning machine and whale optimization algorithm. Earth Sci. Inform. 2020, 13, 1351–1368. [Google Scholar] [CrossRef]
- Bavadiya, V.A. Experimental investigation of the effects of rotational speed and weight on bit on drillstring vibrations, torque, and rate of penetration. In Proceedings of the SPE/IADC Drilling Conference, The Hague, The Netherlands, 14–16 March 2017. SPE-188427-MS. [Google Scholar]
- Laalam, A.; Ouadi, H.; Merzoug, A.; Chemmakh, A.; Boualam, A.; Djezzar, S.; Mellal, I.; Djoudi, M. Statistical analysis of the petrophysical properties of the Bakken Petroleum System. In Proceedings of the SPE/AAPG/SEG Unconventional Resources Technology Conference, Houston, TX, USA, 20–22 June 2022. [Google Scholar]
- Shelokar, P.; Kulkarni, A.; Jayaraman, V.K.; Siarry, P. Metaheuristics in process engineering: A historical perspective. In Applications of Metaheuristics in Process Engineering; Springer: Cham, Switzerland, 2014; pp. 1–38. [Google Scholar]
- Venkateswarlu, C.; Reddy, A.D. Nonlinear Model Predictive Control of Reactive Distillation Based on Stochastic Optimization. Ind. Eng. Chem. Res. 2008, 47, 6949–6960. [Google Scholar] [CrossRef]
- Price, K.; Storn, R.M.; Lampinen, J.A. Differential Evolution: A Practical Approach to Global Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006; ISBN 3540313060. [Google Scholar]
- Jaggi, A.; Upadhaya, S.; Chowdhury, A.R. Successful PDC/RSS vibration management using innovative depth-of-cut control technology: Panna field, offshore India. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 20–22 February 2007. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}