


The Dynamic Mechanical Response of Anchored Fissured Rock Masses at Different Fissure Angles: A Coupled Finite Difference–Discrete Element Method

Abstract
1. Introduction
2. Methodology
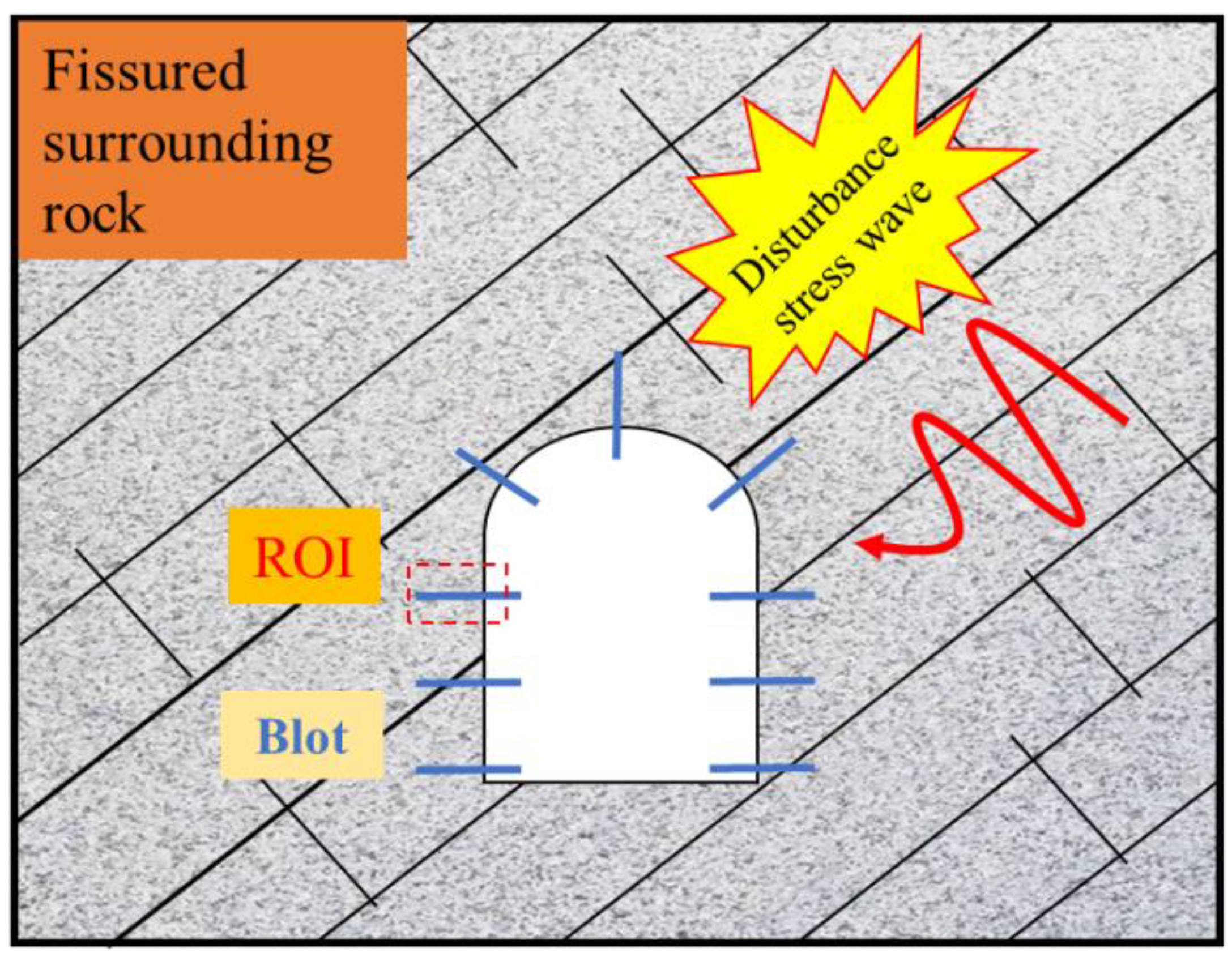
2.1. Experimental Design of Numerical Simulation for Simplified Element
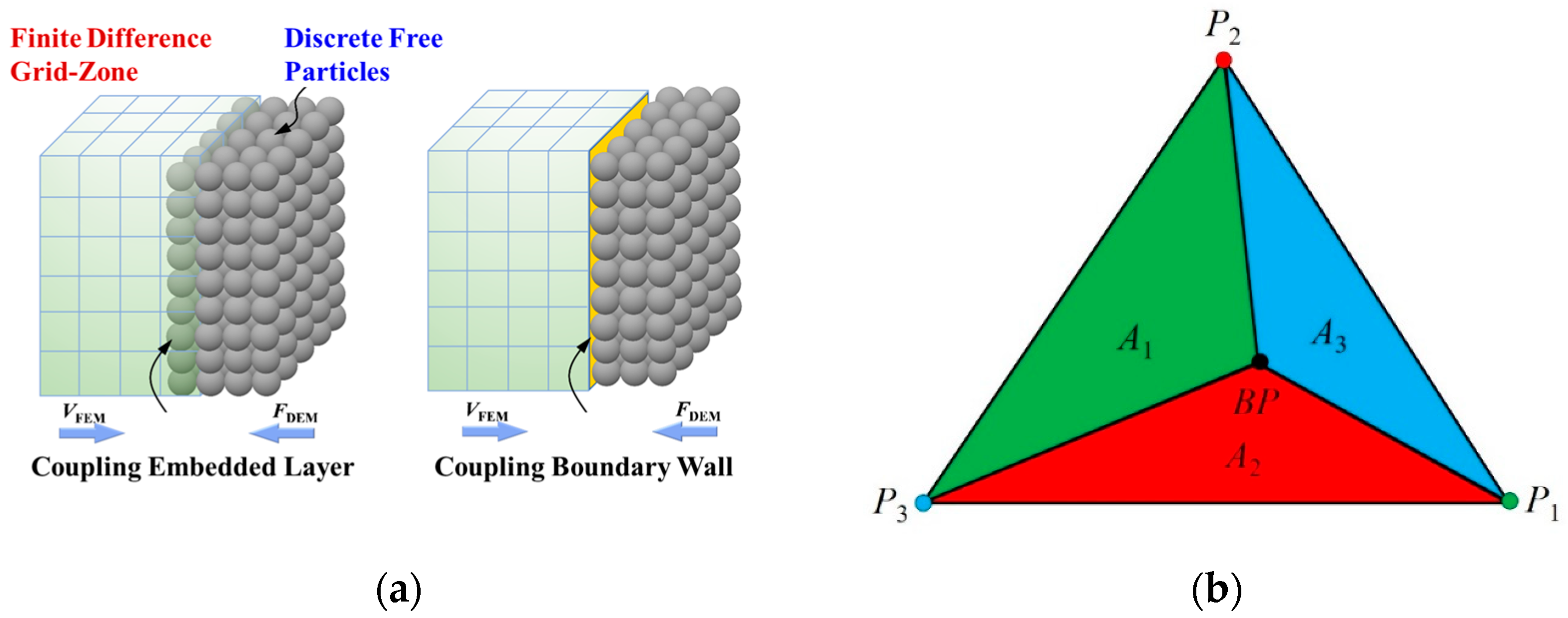
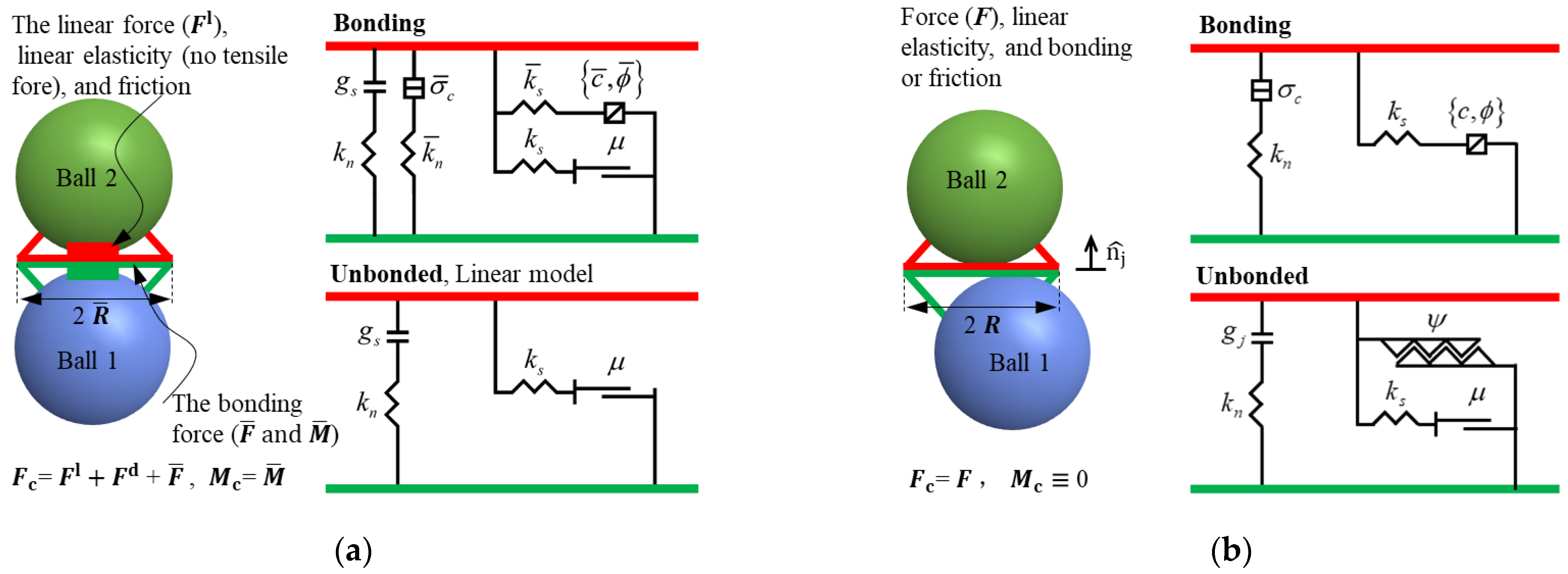
2.2. Finite Difference–Discrete Element Coupling Methods: Basic Principles
2.3. Model Construction and Selection of Basic Parameters
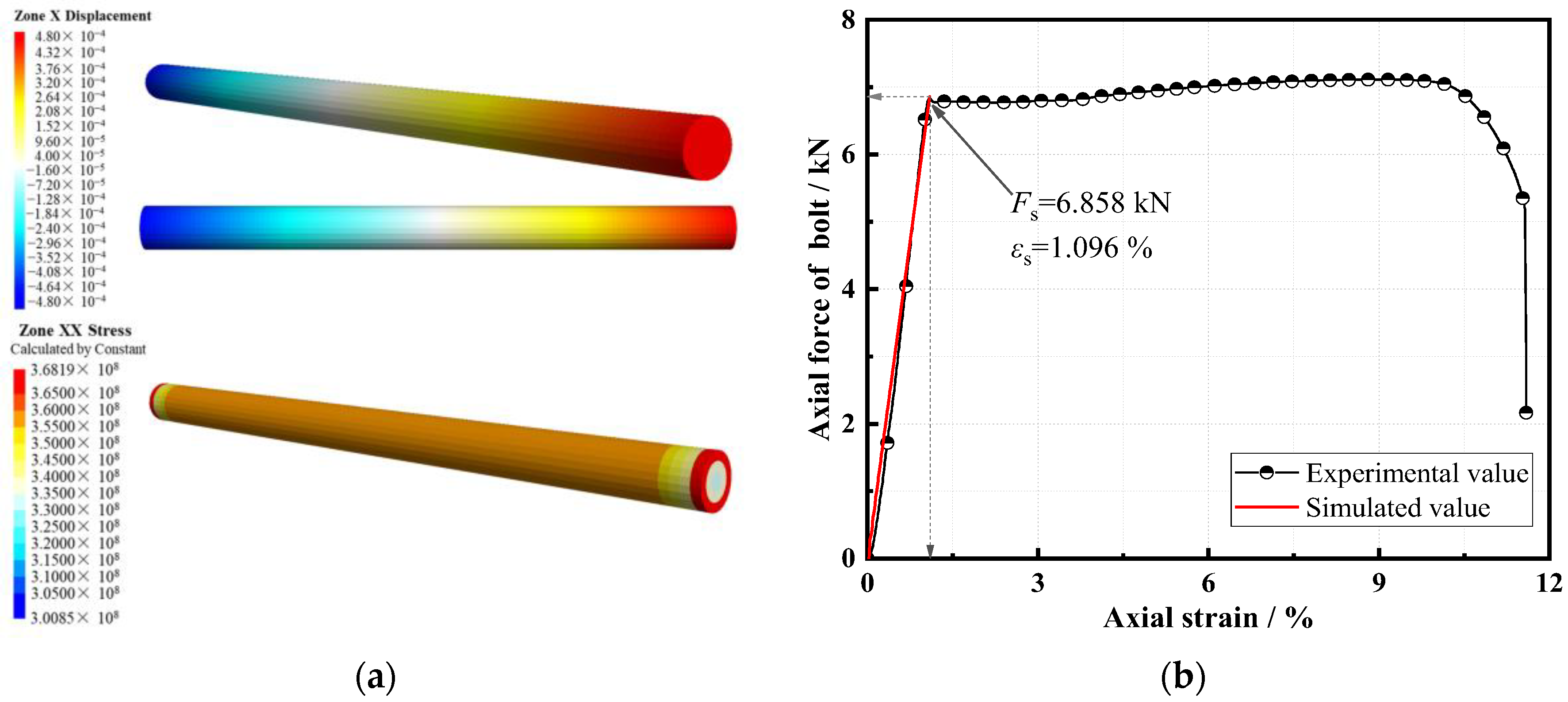
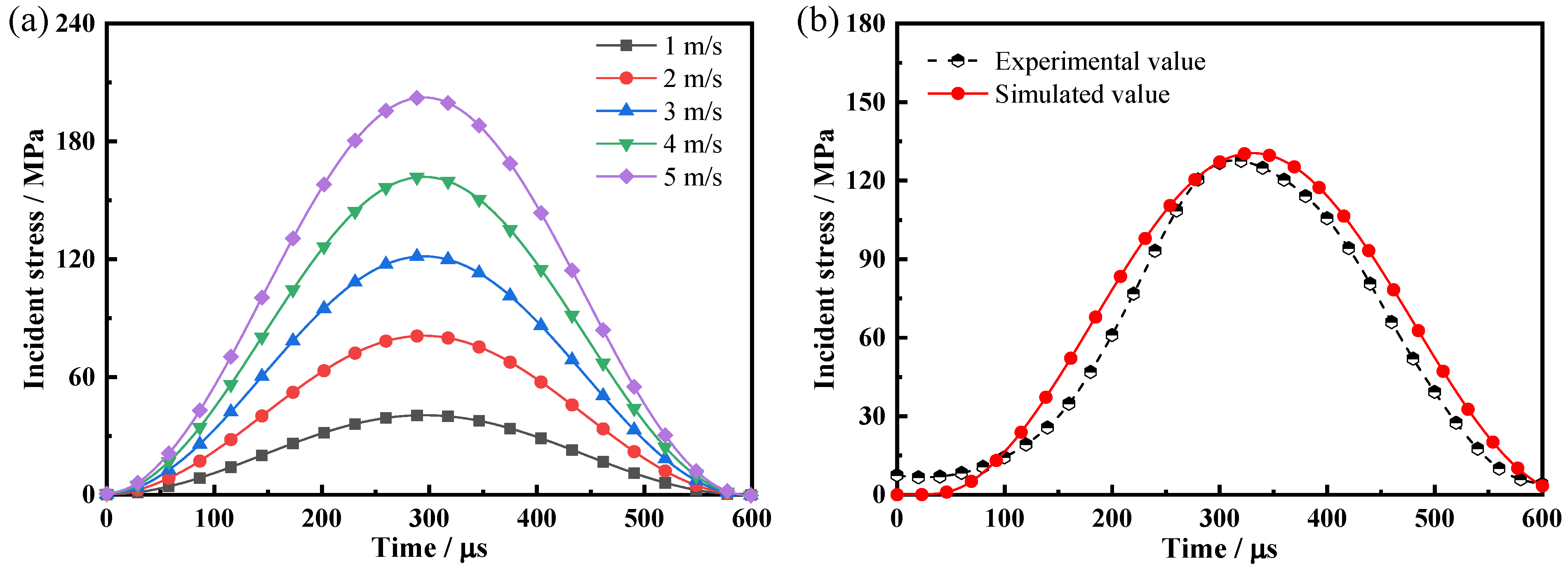
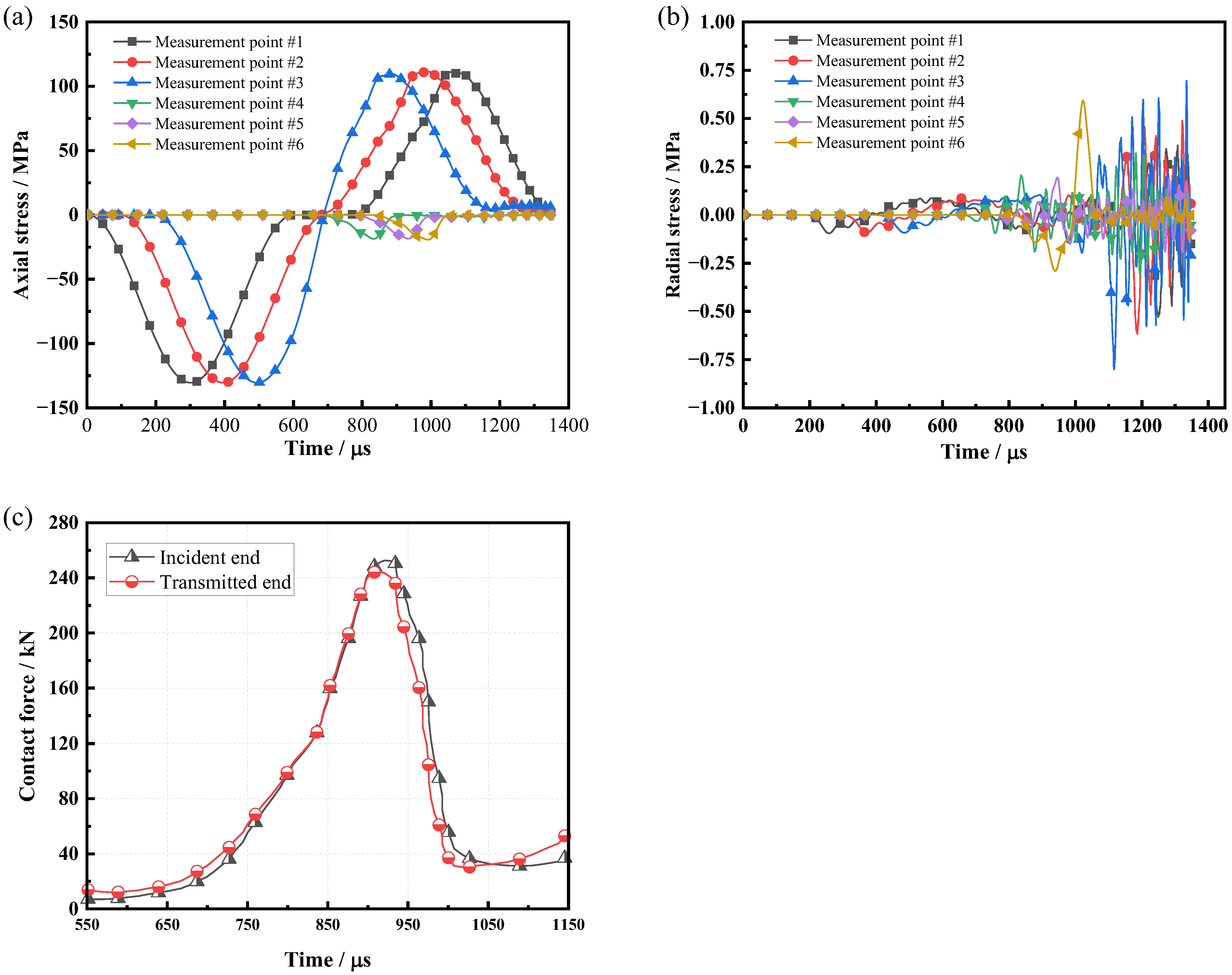
2.4. Loading Method and Model Validity Verification
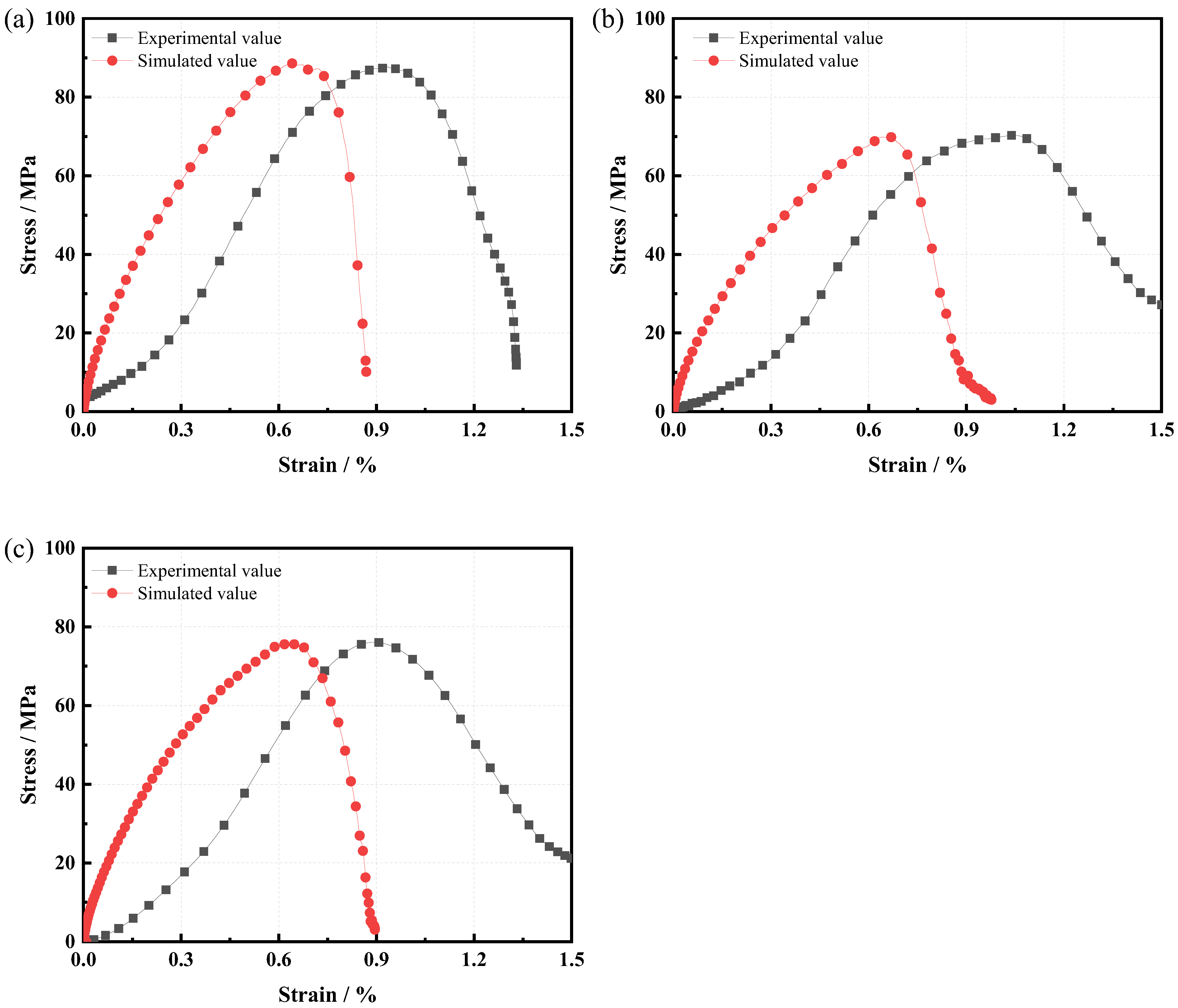
2.5. Particle Microscopic Parameter Calibration
3. Analysis and Discussion
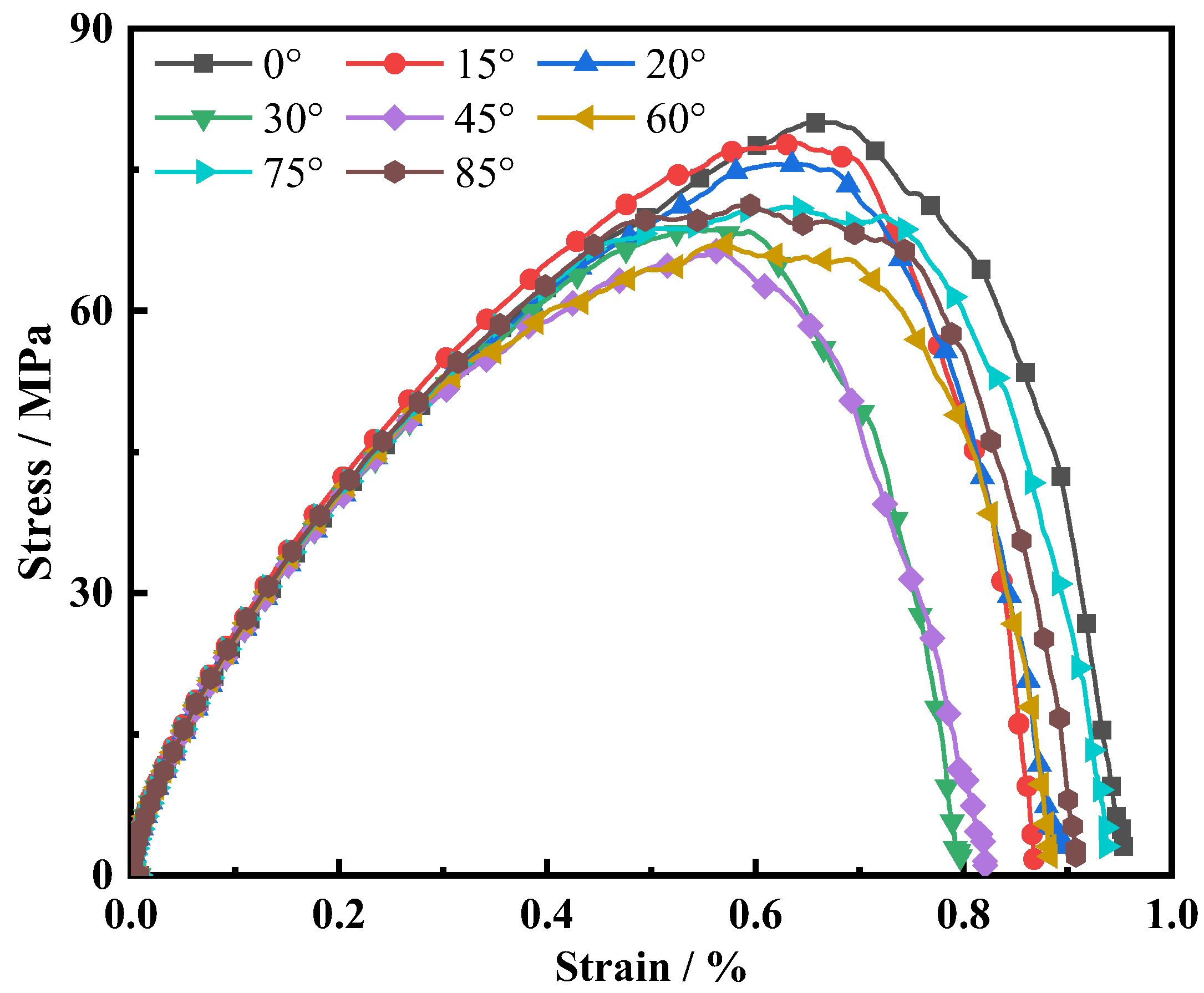
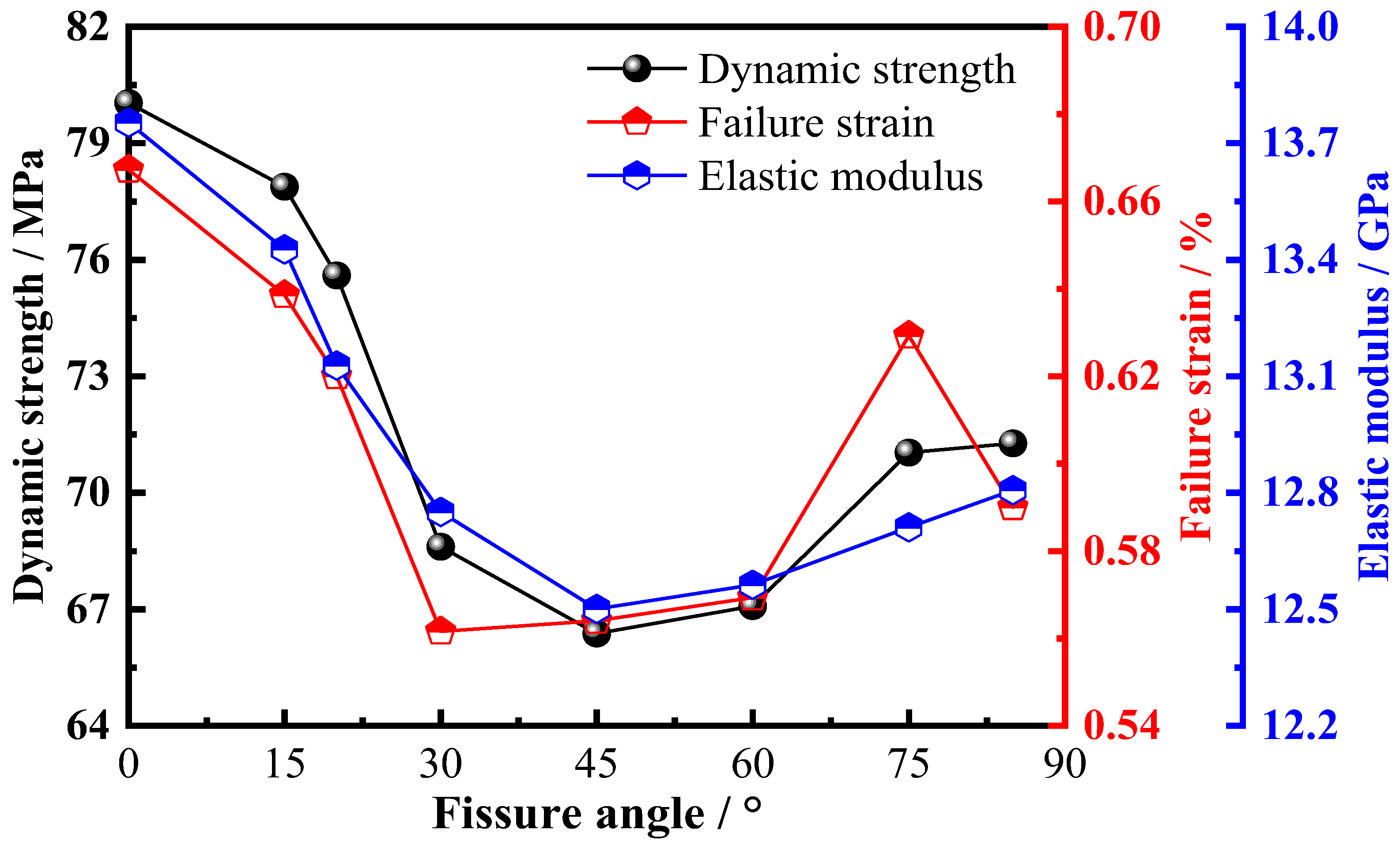
3.1. Dynamic Mechanical Properties of Anchored Bodies at Different Fissure Angles
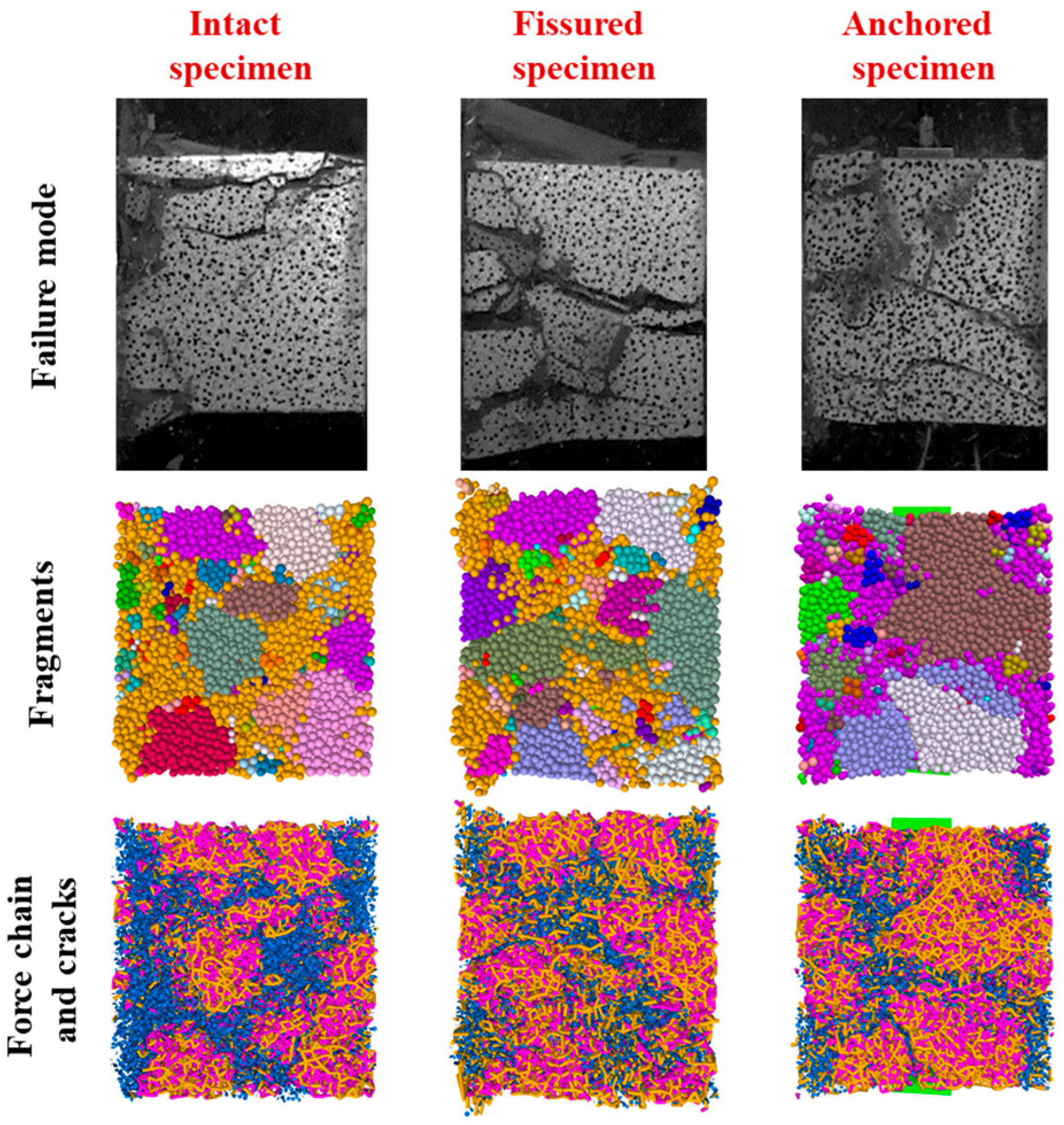
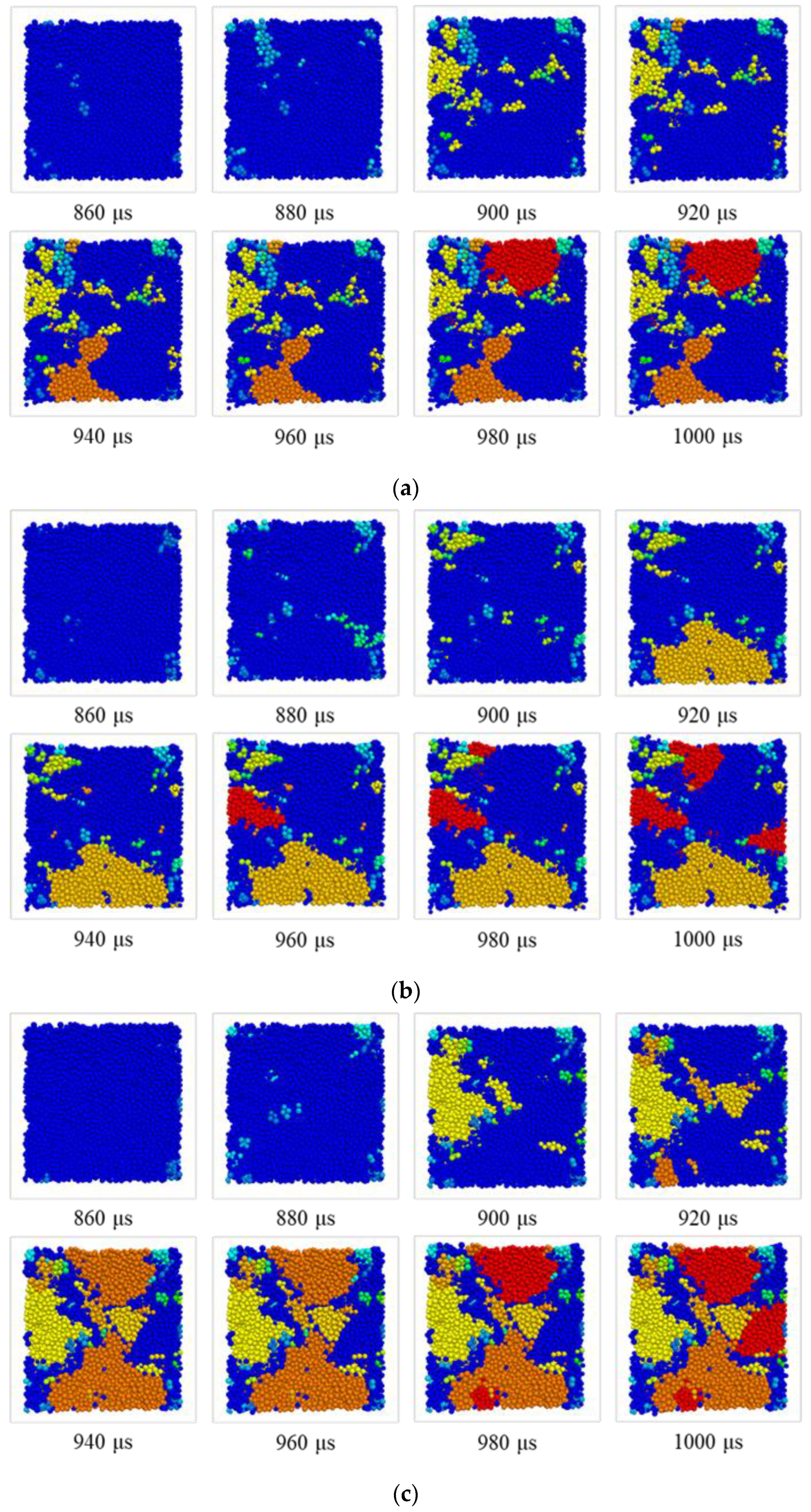
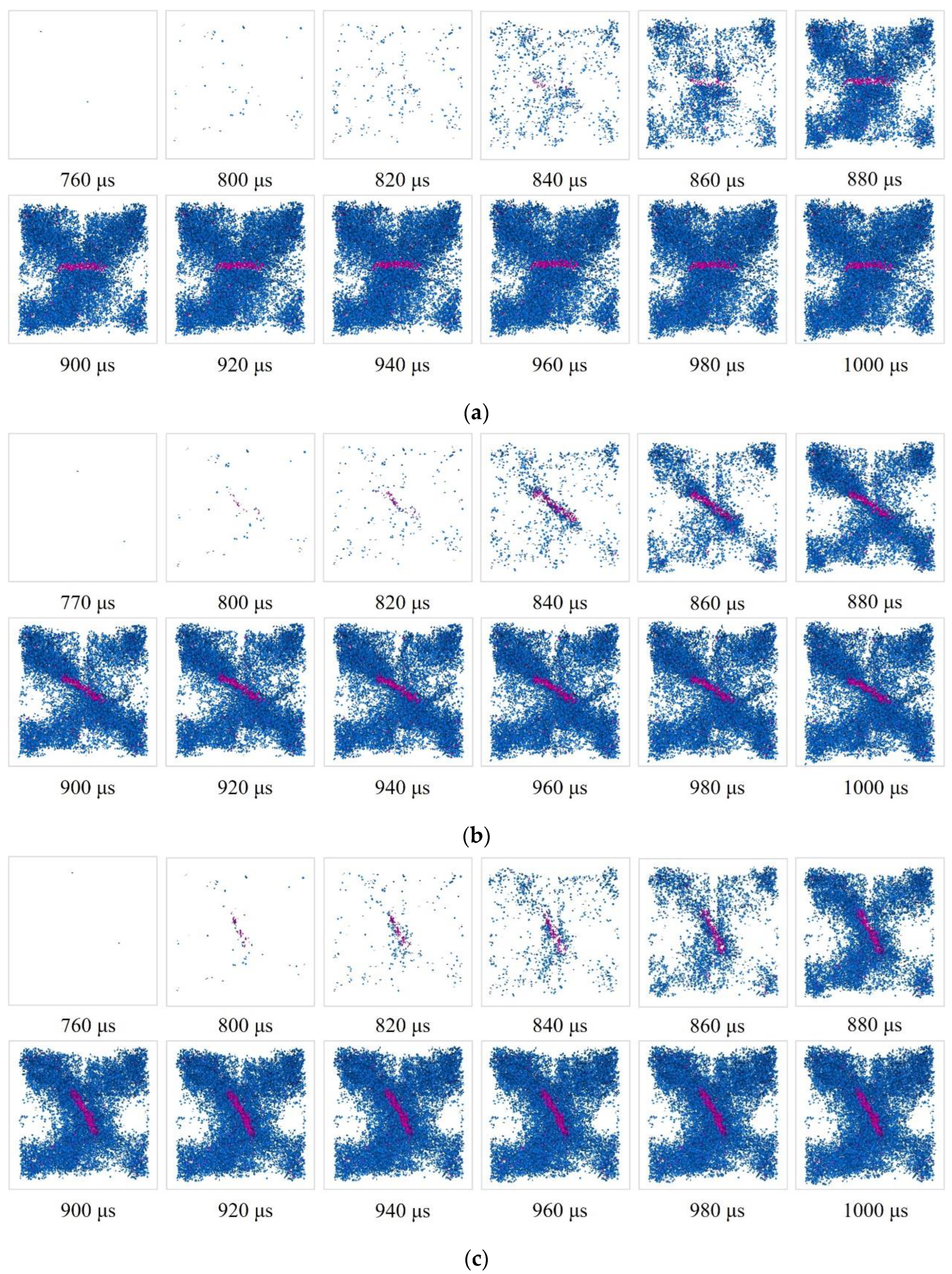
3.2. Fracture Evolution Characteristics of Anchors at Different Fissure Angles
3.3. Force and Deformation Behavior of Anchors at Different Fissure Angles
4. Conclusions
- (1)
- As the fissure angle increases, the anchored, fissured specimen’s dynamic strength, failure strain, and dynamic elastic modulus generally decrease and then increase, with 45° being the critical angle. However, due to the influence of the anchor placement, the improvement effect is limited. Compared to 0°, at a fissure angle of 45°, the dynamic strength, failure strain, and dynamic elastic modulus decreased by 17.08%, 15.48%, and 9.11%, respectively.
- (2)
- The crack and fragment evolution indicates that as the fissure angle increases, the specimen is more prone to initiating cracks along the direction of the initial fracture. This subsequently leads to the formation of tensile cracks in other areas. Increasing the fissure angle causes the specimen’s final failure time to be earlier and makes the main fracture plane more directional.
- (3)
- In the early stage of dynamic loading, the pre-tension force of the anchor increases slowly. As the specimen approaches its load-bearing limit, the anchoring and constraint effects of the anchor and tray are effectively activated, and the pre-tension force increases rapidly. After the specimen’s strength significantly decreases, the stress between the tray and the specimen is released, and the pre-tension force gradually decreases. Additionally, the moment at which the anchor exerts its effect is significantly influenced by the fissure angle. The moments of the significant pre-tension force increase for 0°, 30°, and 60° corresponded to 86.90%, 98.70%, and 95.80% of the peak stress, respectively.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, F.; Zhang, C.; Zhou, H.; Liu, N.; Zhang, Y.; Azhar, M.U.; Dai, F. The Long-Term Safety of a Deeply Buried Soft Rock Tunnel Lining under inside-to-Outside Seepage Conditions. Tunn. Undergr. Space Technol. 2017, 67, 132–146. [Google Scholar] [CrossRef]
- Zhu, H.; Yan, J.; Liang, W. Challenges and Development Prospects of Ultra-Long and Ultra-Deep Mountain Tunnels. Engineering 2019, 5, 384–392. [Google Scholar] [CrossRef]
- Das, R.; Singh, T.N. Effect of Rock Bolt Support Mechanism on Tunnel Deformation in Jointed Rockmass: A Numerical Approach. Undergr. Space 2021, 6, 409–420. [Google Scholar] [CrossRef]
- Zhang, K.; Zhang, G.; Hou, R.; Wu, Y.; Zhou, H. Stress Evolution in Roadway Rock Bolts during Mining in a Fully Mechanized Longwall Face, and an Evaluation of Rock Bolt Support Design. Rock Mech. Rock Eng. 2014, 48, 333–344. [Google Scholar] [CrossRef]
- Kang, H.; Yang, J.; Gao, F.; Li, J. Experimental Study on the Mechanical Behavior of Rock Bolts Subjected to Complex Static and Dynamic Loads. Rock Mech. Rock Eng. 2020, 53, 4993–5004. [Google Scholar] [CrossRef]
- Zhang, B.; Li, S.; Xia, K.; Yang, X.; Zhang, D.; Wang, S.; Zhu, J. Reinforcement of Rock Mass with Cross-Flaws Using Rock Bolt. Tunn. Undergr. Space Technol. 2016, 51, 346–353. [Google Scholar] [CrossRef]
- Yang, S.-Q.; Chen, M.; Tao, Y. Experimental Study on Anchorage Mechanical Behavior and Surface Cracking Characteristics of a Non-Persistent Jointed Rock Mass. Rock Mech. Rock Eng. 2021, 54, 1193–1221. [Google Scholar] [CrossRef]
- Zhao, T.; Zhang, P.; Guo, W.; Gong, X.; Wang, C.; Chen, Y. Controlling Roof with Potential Rock Burst Risk through Different Pre-Crack Length: Mechanism and Effect Research. J. Cent. South Univ. 2022, 29, 3706–3719. [Google Scholar] [CrossRef]
- Liu, D.; Chen, H.; Su, R.K.L.; Chen, L.; Liang, K. Influence of Initial Crack Length on Fracture Properties of Limestone Using DIC Technique. Constr. Build. Mater. 2023, 403, 133020. [Google Scholar] [CrossRef]
- Wang, G.; Liu, T.; Wang, C.; Jiang, Y.; Wu, X.; Zhang, H.; Kong, B.; Zheng, C.; Zhang, Y. Experimental and Numerical Study on the Shear Behaviour of Standard JRC Double-Joint Rock Masses. Int. J. Rock Mech. Min. Sci. 2024, 183, 105930. [Google Scholar] [CrossRef]
- Peng, Y.; Gao, Y.; Xie, Y.; Zhou, Y.; Wu, T.; Shi, W.; Dong, J. Experimental Study on Instability Failure of Rock Mass with Rough Joints under One-Side Constraint Compression. Theor. Appl. Fract. Mech. 2023, 125, 103907. [Google Scholar] [CrossRef]
- Baud, P.; Wong, T.; Zhu, W. Effects of Porosity and Crack Density on the Compressive Strength of Rocks. Int. J. Rock Mech. Min. Sci. 2014, 67, 202–211. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, Y.; Fan, W.; Liu, X.; Luan, H.; Xie, J. Influence of Intermittent Artificial Crack Density on Shear Fracturing and Fractal Behavior of Rock Bridges: Experimental and Numerical Studies. Rock Mech. Rock Eng. 2019, 53, 553–568. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, H.; Deng, Y.; Chen, K.; He, J. Study on Crack Dynamic Evolution and Damage-Fracture Mechanism of Rock with Pre-Existing Cracks Based on Acoustic Emission Location. J. Pet. Sci. Eng. 2021, 201, 108420. [Google Scholar] [CrossRef]
- Xia, B.; Li, Y.; Hu, H.; Luo, Y.; Peng, J. Effect of Crack Angle on Mechanical Behaviors and Damage Evolution Characteristics of Sandstone under Uniaxial Compression. Rock Mech. Rock Eng. 2022, 55, 6567–6582. [Google Scholar] [CrossRef]
- Peng, K.; Wang, Y.; Zou, Q.; Liu, Z.; Mou, J. Effect of Crack Angles on Energy Characteristics of Sandstones under a Complex Stress Path. Eng. Fract. Mech. 2019, 218, 106577. [Google Scholar] [CrossRef]
- Liu, L.; Li, H.; Zhang, G.; Fu, S. Dynamic Strength and Full-Field Cracking Behaviours of Pre-Cracked Rocks under Impact Loads. Int. J. Mech. Sci. 2024, 268, 109049. [Google Scholar] [CrossRef]
- Yan, Z.; Dai, F.; Zhu, J.; Xu, Y. Dynamic Cracking Behaviors and Energy Evolution of Multi-Flawed Rocks under Static Pre-Compression. Rock Mech. Rock Eng. 2021, 54, 5117–5139. [Google Scholar] [CrossRef]
- Sun, X.; Wang, L.; Jiang, M.; Miao, C.; Zhang, Y.; Li, B. Experimental and Numerical Study on the Mechanical Behavior of Layered Rock Anchored by CRLD Anchor Cable. Eng. Fail. Anal. 2024, 165, 108773. [Google Scholar] [CrossRef]
- Guanping, W.; Jianhua, H.; Jie, W.; Dongjie, Y.; Rui, X. Characteristics of Stress, Crack Evolution, and Energy Conversion of Anchored Granite Containing Two Preexisting Fissures under Uniaxial Compression. Bull. Eng. Geol. Environ. 2022, 82, 5. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, D.; Wang, Y.; Zhao, Y.; Yang, H.; Huang, L. Dynamic Characteristics and Anchorage Mechanisms of Fractured Granite: Analytical, Numerical and Experimental Analyses. Rock Mech. Rock Eng. 2024, 58, 1569–1589. [Google Scholar] [CrossRef]
- Fan, D.; Liu, X.; Tan, Y.; Li, X.; Yang, S. Energy Mechanism of Bolt Supporting Effect to Fissured Rock under Static and Dynamic Loads in Deep Coal Mines. Int. J. Min. Sci. Technol. 2024, 34, 371–384. [Google Scholar] [CrossRef]
- Pothana, P.; Ling, K.; Garcia, F.E. Deformation and Damage Evolution Characteristics in Laminated Rocks Using Discrete Element Method. In Proceedings of the 58th U.S. Rock Mechanics/Geomechanics Symposium, Golden, CO, USA, 23 June 2024; p. D022S022R009. [Google Scholar]
- Pothana, P.; Garcia, F.E.; Ling, K. Effective Elastic Properties and Micro-Mechanical Damage Evolution of Composite Granular Rocks: Insights from Particulate Discrete Element Modelling. Rock Mech. Rock Eng. 2024, 57, 6567–6611. [Google Scholar] [CrossRef]
- Ma, Z.; Liao, H.; Dang, F. Unified Elastoplastic Finite Difference and Its Application. Appl. Math. Mech. 2013, 34, 457–474. [Google Scholar] [CrossRef]
- Procházka, P.P. Application of Discrete Element Methods to Fracture Mechanics of Rock Bursts. Eng. Fract. Mech. 2004, 71, 601–618. [Google Scholar] [CrossRef]
- Feng, Z.; Lo, C.-M.; Lin, Q.-F. The Characteristics of the Seismic Signals Induced by Landslides Using a Coupling of Discrete Element and Finite Difference Methods. Landslides 2016, 14, 661–674. [Google Scholar] [CrossRef]
- Huang, F.; Shi, X.; Wu, C.; Dong, G.; Liu, X.; Zheng, A. Stability Analysis of Tunnel under Coal Seam Goaf: Numerical and Physical Modeling. Undergr. Space 2023, 11, 246–261. [Google Scholar] [CrossRef]
- He, Y.; Zhang, M.; Li, M.; Min, Q.; Deng, G.; Wang, Y. Rolling Simulation and Uneven Stratification Analysis of Electrically Conductive Roller-Compacted Concrete by Coupling Continuous-Discontinuous Method. Constr. Build. Mater. 2024, 419, 135447. [Google Scholar] [CrossRef]
- Bai, Y.; Li, X.; Yang, W.; Xu, Z.; Lv, M. Multiscale Analysis of Tunnel Surrounding Rock Disturbance: A PFC3D-FLAC3D Coupling Algorithm with the Overlapping Domain Method. Comput. Geotech. 2022, 147, 104752. [Google Scholar] [CrossRef]
- Zhu, W.; Wang, F.; Mu, J.; Yin, D.; Lu, L.; Chen, Z. Numerical Simulation of Strength and Failure Analysis of Heterogeneous Sandstone under Different Loading Rates. Sci. Rep. 2023, 13, 22722. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, L.; Pan, Z.; Han, Z. Numerical Studies of Interactions between Hydraulic and Natural Fractures by Smooth Joint Model. J. Nat. Gas Sci. Eng. 2017, 46, 592–602. [Google Scholar] [CrossRef]
- He, P.; Kulatilake, P.H.S.W.; Yang, X.; Liu, D.; He, M. Detailed Comparison of Nine Intact Rock Failure Criteria Using Polyaxial Intact Coal Strength Data Obtained through PFC3D Simulations. Acta Geotech. 2017, 13, 419–445. [Google Scholar] [CrossRef]
- Wen, S.; Huang, R.; Zhang, C.; Zhao, X. Mechanical Behavior and Failure Mechanism of Composite Layered Rocks under Dynamic Tensile Loading. Int. J. Rock Mech. Min. Sci. 2023, 170, 105533. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, G.; Li, X.; Liu, T.; Mandal, A.K.; Xu, M.; Xu, K. Analysis of Energy Dissipation and Crack Evolution Law of Sandstone under Impact Load. Int. J. Rock Mech. Min. Sci. 2020, 132, 104359. [Google Scholar] [CrossRef]
- Feng, P.; Dai, F.; Liu, Y.; Xu, N.; Zhao, T. Effects of strain rate on the mechanical and fracturing behaviors of rock-like specimens containing two unparallel fissures under uniaxial compression. Soil Dyn. Earthq. Eng. 2018, 110, 195–211. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Properties of Rock-Like Matrix Particles | Value | Basic Properties of Particles in the Grouting Zone | Value |
|---|---|---|---|
| Radius range/mm | 1.00~1.66 | Radius range/mm | 0.10~0.25 |
| Porosity | 0.30 | Porosity | 0.30 |
| Density/kg/m3 | 2110.00 | Density/kg/m3 | 1800.00 |
| Microscopic Parameters | Rock-Like Matrix | Grouting Region | Fissure |
|---|---|---|---|
| Normal stifness (GPa/m) | — | — | 1200 |
| Tangential stiffness (GPa/m) | — | — | 1200 |
| Effective elastic modulus (GPa) | 12.0 | 10.5 | — |
| Ratio of normal to tangential stiffness | 2.0 | 2.0 | — |
| Coefficient of friction | 0.5 | 0.5 | 0.2 |
| Bonded effective elastic modulus (GPa) | 12.0 | 10.5 | — |
| Ratio of bonded normal to tangential stiffness | 2.0 | 2.0 | — |
| Tensile strength (MPa) | 63.0 | 54.2 | 40 |
| Cohesion (MPa) | 100.8 | 86.7 | 54.4 |
| Friction angle (°) | 10 | 10 | 30 |
| Bond activation radius (mm) | 0.2 | 0.2 | 0.1 |
| Type | Parameter | Laboratory Test | Numerical Simulation | Error |
|---|---|---|---|---|
| Intact specimen | Dynamic strength (MPa) | 87.71 | 88.59 | 1.00% |
| Dynamic elastic modulus (GPa) | 14.83 | 14.51 | 2.21% | |
| Fissured specimen | Dynamic strength (MPa) | 70.32 | 69.92 | 0.57% |
| Dynamic elastic modulus (GPa) | 12.32 | 12.37 | 0.41% | |
| Anchored specimen | Dynamic strength (MPa) | 76.07 | 75.59 | 0.64% |
| Dynamic elastic modulus (GPa) | 13.54 | 13.13 | 2.82% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Su, H.; Qin, X.; Wang, W. The Dynamic Mechanical Response of Anchored Fissured Rock Masses at Different Fissure Angles: A Coupled Finite Difference–Discrete Element Method. Processes 2025, 13, 797. https://doi.org/10.3390/pr13030797
Chen G, Su H, Qin X, Wang W. The Dynamic Mechanical Response of Anchored Fissured Rock Masses at Different Fissure Angles: A Coupled Finite Difference–Discrete Element Method. Processes. 2025; 13(3):797. https://doi.org/10.3390/pr13030797
Chicago/Turabian StyleChen, Guofei, Haijian Su, Xiaofeng Qin, and Wenbo Wang. 2025. "The Dynamic Mechanical Response of Anchored Fissured Rock Masses at Different Fissure Angles: A Coupled Finite Difference–Discrete Element Method" Processes 13, no. 3: 797. https://doi.org/10.3390/pr13030797
APA StyleChen, G., Su, H., Qin, X., & Wang, W. (2025). The Dynamic Mechanical Response of Anchored Fissured Rock Masses at Different Fissure Angles: A Coupled Finite Difference–Discrete Element Method. Processes, 13(3), 797. https://doi.org/10.3390/pr13030797