Abstract
Electric vehicles (EVs) powered by lithium-ion batteries are crucial for sustainable transportation. Accurate State of Charge (SOC) estimation, a core function of Battery Management Systems (BMS), enhances battery performance, lifespan, and safety. This paper proposes a hybrid CNN-LSTM-AKF model integrating Convolutional Neural Networks (CNN) and Long Short-Term Memory (LSTM) Neural Networks with an Adaptive Kalman Filter. CNN extracts spatial features from current, voltage, and temperature data, while LSTM processes temporal dependencies. AKF reduces output fluctuations. Trained on datasets under three operating conditions, the model was tested across various temperatures and initial SOC states. Results demonstrate that the proposed model significantly outperforms standalone LSTM and LSTM-AKF model, particularly at low temperatures. Within 0 °C to 50 °C, it achieves Root Mean Square Error (RMSE) and Mean Absolute Error (MAE) below 1.51% and 1.18%, respectively. With an initial SOC of 80%, the model achieves an RMSE of 1.09% and MAE of 0.88%, showing rapid convergence. The model exhibits high accuracy, strong adaptability, and robust performance.
1. Introduction
Amidst global energy challenges and the transition toward low-carbon economies, optimizing energy mix and enhancing energy efficiency have become a pressing priority [1,2]. The development and deployment of new energy technologies are fundamental to sustainable progress, driving the rapid advancement of clean and efficient electric vehicles (EVs). Lithium-ion batteries, serving as the primary power source for EVs [3,4], are widely adopted and subject to substantial research due to their high energy density, reliability, and extended service life [5,6]. State of Charge (SOC) estimation constitutes a core function of the Battery Management System (BMS) [7,8]. Improving its accuracy is essential for enhancing battery longevity, operational efficiency, and safety.
The SOC of a battery must be assessed by analyzing its correlations with parameters such as voltage and current [9,10]. This evaluation is also influenced by factors like ambient temperature and battery aging [11]. SOC estimation methods can be broadly categorized into two primary groups: (1) direct measurement techniques and (2) indirect analysis approaches.
Direct measurement approaches primarily include coulombic integration [12,13,14], open-circuit voltage analysis [15,16], and electrochemical impedance spectroscopy. Indirect analytical strategies encompass model-based methods, adaptive filtering techniques [17,18], and artificial intelligence-driven solutions. Specifically, model-based methodologies involve constructing representations of battery characteristics through equivalent circuit analogs [19,20] or electrochemical formulations [21,22]. These models are subsequently integrated with algorithms such as Kalman filtering (KF) [23,24] and particle filtering (PF) [25,26]. By processing real-world operational data like terminal voltage and current, these integrated systems generate precise SOC estimations.
Conventional SOC estimation techniques face significant challenges due to inherent battery model uncertainties and complexities, often struggling with intricate model structures, parameter sensitivity, and limited adaptability. Meanwhile, machine learning and deep learning approaches are gaining substantial traction across renewable energy applications [27,28]. Consequently, SOC estimation methodologies are undergoing a paradigm shift toward next-generation, digitally enabled, AI-driven data-centric approaches [29,30].
Convolutional Neural Networks (CNN) [31] and Recurrent Neural Networks (RNN) [32] represent two widely adopted deep learning architectures. Standard RNNs frequently encounter gradient instability and signal attenuation during extended sequences, limiting their capacity to reliably capture long-term dependencies. As a predominant RNN variant, Long Short-Term Memory (LSTM) networks [33] incorporate gating mechanisms—including forget, input, and output gates—to address gradient decay. While this enhanced structure increases computational complexity, it effectively mitigates RNN’s limitations. Current research predominantly focuses on RNN variants or hybrid models integrating such architectures. For instance, Ma et al. [34] trained an LSTM model using datasets provided by Phillip Kollmeyer, achieving SOC estimation errors ranging between 1% and 1.8%. In a separate study, Bian et al. [35] employed a stacked bidirectional LSTM configuration for battery SOC estimation, attaining a mean absolute error (MAE) as low as 0.46%.
Hybrid neural network models are now extensively investigated. Hong et al. [36] developed an LSTM-GRU framework by integrating Long Short-Term Memory with Gated Recurrent Units. By incorporating noisy data into the input parameters, their model achieved a minimum Mean Absolute Percentage Error (MAPE) of 1.03% and MAE of 0.73% under summer conditions. Zhao et al. [37] introduced a combined LSTM-RNN and Adaptive Extended Kalman Filter (AEKF) algorithm, which demonstrated superior estimation accuracy over conventional Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) methods across various discharge conditions, particularly at low temperatures. Sun et al. [38] proposed a CNN-LSTM hybrid model that exhibited enhanced prediction accuracy and reliability compared to standalone LSTM and Bidirectional LSTM architectures. Yang et al. [39] designed an adaptive Feedback-CNN-GRU-Kalman Filter (Fb-Ada-CNN-GRU-KF) that utilizes Kalman filtering as a post-processing stage to generate more stable and smoothed SOC estimates. Chen et al. [40] incorporated a Self-Attention (SA) mechanism into LSTM networks, creating an LSTM-SA model that accelerates convergence to the true SOC value even with inaccurate initial conditions. In a separate development, Zou et al. [41] devised an Attention-based CNN-LSTM (A-CNN-LSTM) method for SOC estimation. Their approach reduced RMSE, MAE, and MAPE by 32.75%, 45.88%, and 53.36%, respectively, when compared to the best results from existing CNN, LSTM, GRU, CNN-LSTM, and CNN-GRU models.
Machine learning-based SOC estimation methods typically demand substantial time investment for model hyperparameter tuning, particularly to address output fluctuations during current surges. To achieve more precise, stable, and smoothed SOC estimations under varying temperature conditions and initial states, this study introduces a hybrid framework integrating CNN-LSTM with an Adaptive Kalman Filter (AKF). The CNN component extracts spatial features from time-series data to capture transient dynamics during battery operation. These features are subsequently processed through LSTM layers to learn long-term temporal dependencies in SOC evolution. The AKF module demonstrates particular effectiveness in adapting to internal parameter variations and environmental changes, thereby generating refined estimation outputs. This integrated architecture enhances the interpretation of complex temporal patterns while enabling accurate real-time and predictive state assessment. The main contents of the paper are organized as Figure 1 and the principal contributions of this research are outlined as follows:

Figure 1.
The main contents of the paper.
- (1)
- A novel CNN-LSTM-AKF hybrid neural network architecture is proposed to deliver stable and accurate SOC estimations under low-temperature conditions and varying initial states, leveraging AKF to stabilize the model’s SOC outputs.
- (2)
- The model is evaluated from two perspectives: assessing SOC estimation performance across different temperatures and initial values, followed by comprehensive error analysis.
- (3)
- Through systematic comparison of three model variants—LSTM, LSTM-AKF, and CNN-LSTM-AKF—the proposed architecture demonstrates enhanced accuracy, superior adaptability, and robust performance.
The remainder of this paper is organized as follows: Section 2 outlines the fundamental concepts of battery SOC and describes the dataset processing procedures; Section 3 details the architecture and implementation of both the CNN-LSTM-AKF and LSTM-AKF models; Section 4 presents experimental results and analysis under varying temperatures and initial SOC conditions; and Section 5 concludes the paper with a comprehensive summary.
2. Battery SOC Fundamentals and Data Processing
2.1. Battery SOC Fundamentals
State of Charge (SOC) represents the proportion of currently available charge relative to the maximum storable charge capacity, typically expressed as a percentage [42]. SOC values range from 0% to 100%, where 0% indicates complete battery depletion and 100% corresponds to full charge capacity.
where indicates the battery’s present charge level and corresponds to its full charge capacity.
2.2. Data Processing
This study utilizes a publicly available dataset from the University of Maryland Battery Laboratory [43]. To realistically simulate the load characteristics of electric vehicle batteries under real-world operating scenarios, three distinct driving cycles were employed: Dynamic Stress Test (DST), Federal Urban Driving Schedule (FUDS), and the US EPA Highway Driving Schedule for 2006 (US06).
The experimental tests utilized LG 18650HG2 lithium-ion cells (LG Energy Solution, Seoul, Republic of Korea), with detailed specifications provided in Table 1.

Table 1.
Battery parameters.
The LG 18650HG2 cells underwent comprehensive testing under three distinct operational profiles across multiple temperature conditions (including low temperatures of 0 °C, 10 °C, 20 °C, and elevated temperatures of 25 °C, 30 °C, and 40 °C) to evaluate thermal effects on battery performance. Figure 2 illustrates the discharge current profiles and corresponding voltage measurements for one complete cycle of each operational condition at 25 °C, demonstrating the battery’s discharge characteristics under different testing scenarios. The DST current profile comprises multiple current steps with varying amplitudes and durations, where negative phases denote regenerative charging. This profile incorporates diverse current transitions, serving as a simplified representation of real-world load variations. In comparison, the FUDS and US06 profiles exhibit more complex current variations, yet provide testing conditions that more closely approximate practical applications.
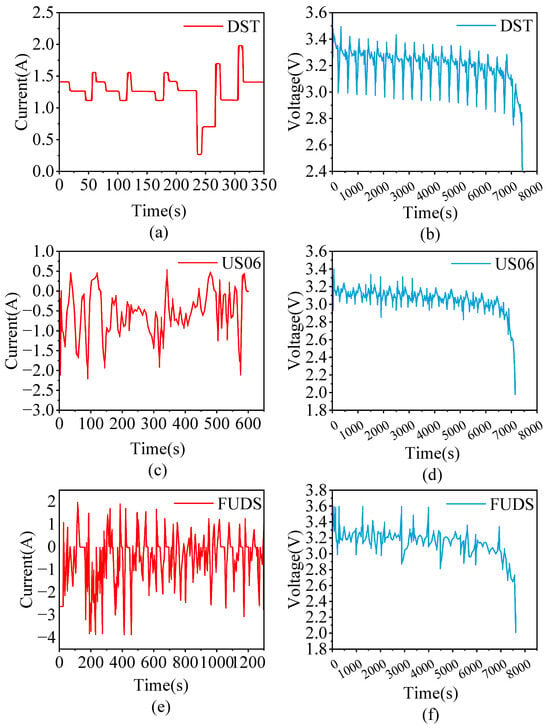
Figure 2.
Current and voltage curves of (a,b) DST, (c,d) US06, (e,f) FUDS.
To establish a robust data foundation for subsequent modeling, a systematic data preparation pipeline was implemented. The dataset underwent refinement through data cleansing (addressing missing values via removal or imputation), preprocessing (standardization and normalization), and feature engineering (feature construction and selection). These procedures were executed utilizing PyTorch v.2.1.2 and Scikit-learn v.1.3.2 frameworks. The detailed workflow is presented below:
- (1)
- Data Acquisition: Data loading and preprocessing were executed employing libraries including Pandas and NumPy.
- (2)
- Data Cleansing: Incomplete entries were eliminated through deletion of rows/columns containing missing values or appropriate imputation techniques.
- (3)
- Preprocessing: Voltage, current, and temperature parameters were normalized using the min-max scaling method. This technique confines the data to a predetermined scale defined by max_num and min_num parameters, mathematically expressed as:
- (4)
- Feature Engineering: Feature selection was performed using the SelectKBest algorithm from the Scikit-learn framework. This method retains the k most relevant features from the feature set by evaluating the statistical relationship between each feature and the target variable through the f_regression scoring function, ultimately preserving the features with the highest statistical scores.
The processed dataset serves as network input comprising voltage, current, and temperature measurements—denoted as , , and respectively—corresponding to each temporal increment .
Employing distinct datasets for training, validation, and testing enhances model generalization. The battery datasets for DST, US06, and FUDS operating conditions across various temperatures have been systematically partitioned to facilitate subsequent model development, with specific allocations detailed in Table 2.
Table 2.
Partition datasets.
3. Design and Implementation of Hybrid Neural Network Models
Neural network models process complex information through a biomimetic mechanism inspired by the human brain’s organizational principles [44]. These systems comprise multiple tiers of densely interconnected nodes, where inter-neuronal communication occurs through adjustable synaptic weights. A typical architecture consists of sequential input, hidden, and output processing layers. Figure 3 presents the structural schematic integrating convolutional and long short-term memory network components.
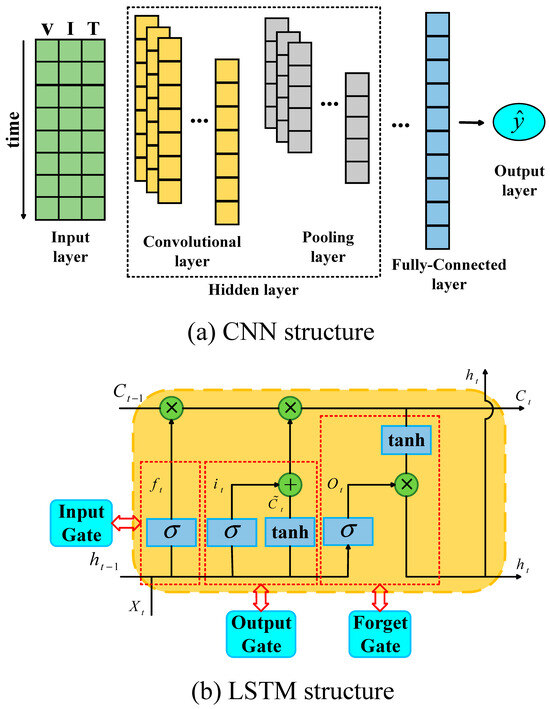
Figure 3.
CNN structure and LSTM structure.
3.1. LSTM
The architecture fundamentally comprises three gating mechanisms coupled with a persistent memory cell.
- (1)
- Forget Gate: This mechanism modulates the retention and elimination of information within the memory cell by integrating current input with the preceding hidden state to generate its activation output . The operational principle follows the expression:where denotes the sigmoid activation function; designates the weight matrix of the forget gate; represents the bias term; and the operator denotes the concatenation operation between vectors and .
- (2)
- Input Gate: This component regulates the integration of incoming data , determining which elements should be incorporated into the memory cell. The sigmoid layer generates a gating signal that scales inputs to a continuous spectrum between 0 and 1, where unity indicates complete retention and zero represents total suppression. Through a complementary pathway, the tanh activation produces a candidate vector containing potential state modifications.where denotes the sigmoid activation function; and represent the parameter matrices of the input gate; and signify the bias vectors.
- (3)
- Output Gate: This component determines which segments of the cell state should be emitted as the final output. The operational procedure involves first processing the cell state through a tanh activation function to constrain values within the [−1,1] range, then performing element-wise multiplication with the output from the sigmoid gate to generate the ultimate output .where denotes the weight matrix of the output gate, and represents its corresponding bias vector.
- (4)
- Cell State Update: The cell state represents a fundamental innovation in LSTM architecture, maintaining persistent information flow throughout the sequential chain with minimal linear transformation. This design enables nearly lossless propagation of contextual information across extended time periods. The memory content undergoes strategic modification through coordinated gating operations, where updates are systematically applied based on outputs from both forget and input gates.where denotes the memory cell’s state from the preceding time step.
Through its sophisticated gating mechanisms, the LSTM architecture achieves selective retention and elimination of information streams, effectively streamlining complex sequential tasks while demonstrating remarkable capabilities in temporal pattern recognition.
3.2. CNN
Battery SOC estimation involves analyzing sequential voltage, current, and temperature measurements recorded during charge–discharge cycles. These time-dependent parameters constitute typical temporal data sequences. The CNN framework incorporates multiple convolutional and pooling operations, followed by feedforward classification layers and a final output stage. When processing chronological data streams, the model requires deliberate architectural refinements to effectively capture temporal dependencies within sequential information patterns.
Convolutional kernels traverse temporal sequences to capture localized patterns, while the convolution mechanism itself enhances learning efficiency with reduced memory demands. The subsequent pooling operation reduces data dimensionality to minimize computational load, preserves essential features, and improves generalization capability. Ultimately, the fully connected layer transforms flattened feature representations into regression-based estimations.
The integration of CNN and LSTM architectures leverages their complementary strengths: CNN specializes in capturing spatial dependencies within data patterns, while LSTM excels at modeling temporal sequences. Convolutional operations are applied to battery parameters to distill critical spatial features from voltage, current, and temperature measurements, revealing essential characteristics reflecting battery states. These extracted representations are subsequently fed into LSTM layers to capture their temporal dynamics. The LSTM’s selective retention mechanism preserves relevant historical information while discarding irrelevant data, which proves crucial for accurate SOC estimation since battery status depends not only on instantaneous inputs but also on preceding conditions. The processed temporal features finally traverse fully connected layers to generate precise SOC predictions at the output stage.
3.3. AKF
Building upon the classical Kalman framework, the Adaptive Kalman Filter (AKF) incorporates enhanced capabilities to dynamically calibrate noise covariance matrices and when discrepancies arise between actual measurements and predicted values. This self-adjusting mechanism demonstrates enhanced resilience to environmental fluctuations and model inaccuracies. By continuously refining noise statistics during operation, AKF achieves superior precision and robustness in battery SOC estimation. The algorithm effectively accommodates inherent challenges including nonlinear battery dynamics and time-varying parameter characteristics.
This investigation employs AKF to enhance output smoothness in the estimation framework. The governing state-space representation is formulated as follows:
where denotes the measured battery current (positive during discharge and negative during charging), represents the sampling interval, and signifies the nominal battery capacity. Specifically, corresponds to the coulomb-counting State of Charge at time , while indicates the LSTM-generated State of Charge at time . characterizes the Gaussian process noise, and embodies the Gaussian measurement noise.
The described state-space formulation maintains linearity throughout its structure. The process noise covariance matrix , calibrated according to current sensor acquisition precision, characterizes the magnitude of process disturbances. The measurement noise covariance matrix , determined by the precision and fluctuation magnitude of LSTM-generated SOC outputs, quantifies measurement uncertainty levels. The error covariance matrix reflects the estimation accuracy of system states. The implemented AKF methodology incorporates adaptive recalibration mechanisms for dynamically adjusting both and parameters during operation.
The recursive procedure for refining SOC estimates through AKF follows these sequential operations:
- (1)
- Initial Parameter Configuration
Initial parameter configuration for the state observer: initial State of Charge is set to , error covariance to , process noise covariance to , measurement noise covariance to , and covariance matching window size to .
- (2)
- Priori Estimation
State Estimation:
Error Covariance Estimation:
- (3)
- Posterior Estimation and State Update
Kalman Gain Calculation:
State Update:
Error Covariance Update:
where and represent the prior estimated state and error covariance at time step , while and denote the final output estimates.
- (4)
- Adaptive Noise Covariance Matching
Residual Computation:
Residual Covariance Calculation:
Innovation Covariance Computation:
Process Noise Covariance Update:
Measurement Noise Covariance Update:
3.4. LSTM-AKF and CNN-LSTM-AKF
The model architecture was implemented within the PyTorch learning framework and optimized through GPU-accelerated Python simulation. The computational experiments were conducted on an 11th generation Core i5-11400H processor operating at 2.70 GHz (Intel, Santa Clara, CA, USA), supported by 16 GB of system memory.
Model development in PyTorch initiates by creating a class derived from torch.nn.Module, which serves as the foundational component for all neural network architectures. The implementation proceeds with model initialization, where key hyperparameters are configured including the number of LSTM layers, neuronal count per layer, batch dimensions, and learning rate specifications. Subsequent phases encompass the definition of forward propagation operations, instantiation of the model structure, configuration of loss metrics and optimization algorithms, followed by the implementation of training loops incorporating loss computation, gradient backpropagation, and parameter update mechanisms.
Figure 4 depicts the architectural configuration of the developed LSTM-AKF and CNN-LSTM-AKF model frameworks.
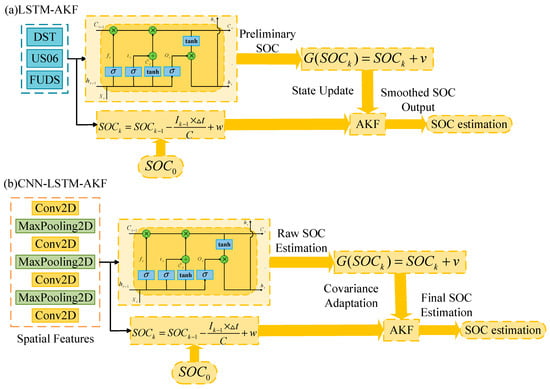
Figure 4.
The structure of LSTM-AKF and CNN-LSTM-AKF.
The raw input sequences (voltage, current, temperature) are processed by the CNN layers to extract spatial features. These features are then fed into the LSTM layer to capture temporal dependencies. Finally, a fully connected layer produces the preliminary SOC estimate, denoted as .
The sequence of values is passed to the AKF module. The AKF treats as its “measurement.” It then applies its recursive prediction and update cycles, as detailed in Section 3.3, to produce the final, smoothed, and more stable SOC estimate, denoted as .
The module configuration encompasses the following key aspects:
The CNN architecture incorporates four convolutional tiers with progressively expanding filter counts of 16, 32, 64, and 128 channels. This hierarchical expansion enables the model to capture increasingly sophisticated patterns in multivariate temporal data through enhanced representational capacity. All layers employ 3 × 3 kernels for localized feature detection, (1,1) stride configuration to maintain spatial dimensions, and same-padding to preserve feature map sizes. Following each convolution, a 2 × 2 max-pooling operation reduces feature dimensionality while retaining dominant characteristics. The quadruple convolution-pooling sequence yields a 2 × 2 × 256 tensor, where the third dimension denotes feature channels. This volumetric output undergoes flattening into a 1024-element vector (derived from 2 × 2 × 256), creating temporally structured features for subsequent LSTM processing. This dimensional transformation enables effective temporal modeling of hierarchical features for capturing long-range dependencies in sequential data.
The input tensor for a single batch can be described as: (batch_size, channels, height, width) = (batch_size, 1, sequence_length, num_features). To make this compatible with standard 2D CNN libraries (like PyTorch’s Conv2d), we added a singleton channel dimension, resulting in a 4D tensor. The Conv2d layer then uses 3 × 3 kernels to slide over this 2D grid. The primary rationale for this 2D approach is to allow the convolutional kernels to learn patterns not only across the temporal dimension but also across the feature dimension at a given point in time. A 1D CNN, with a kernel size of k and a 1D stride, slides only along the time axis, learning local temporal patterns within each feature independently (or mixing them if the input is a 1D vector of all features). In contrast, our 2D kernel (e.g., 3 × 3) can simultaneously look at a short time window and the interactions between adjacent features. For instance, a kernel could learn a specific pattern that involves a certain voltage level co-occurring with a specific current and temperature reading over a few time steps, capturing the multi-variable spatial correlation at a transient moment.
The choice of a 2D CNN architecture over the more conventional 1D CNN was motivated by the objective to capture inter-feature correlations within a local temporal context. A 1D CNN kernel, sliding exclusively along the time axis, is highly effective at learning temporal motifs but treats the feature vector at each time step as a monolithic entity. Our 2D approach, with kernels spanning both time and feature axes, explicitly models the local spatial structure across features, allowing it to learn patterns that are defined by the concurrent state of multiple variables. This is particularly relevant for battery data, where the instantaneous relationship between voltage, current, and temperature is a critical indicator of the battery’s state. We posit that this capability to learn a richer set of multi-variable, short-term spatial-temporal features provides a performance advantage, as evidenced by the superior results of the proposed model
The architectural design employs a unidirectional LSTM layer with 256 hidden units, determined through systematic optimization balancing computational efficiency against model performance. This configuration maintains estimation precision while effectively mitigating both computational overhead and potential overfitting risks.
The computational workflow initiates with forward propagation, where input training data undergoes sequential processing through the neural architecture to generate time-step specific SOC predictions. These outputs subsequently contribute to error quantification and aggregate loss computation through predefined objective functions. The backward propagation phase employs the Adam optimizer with loss minimization objectives, executing gradient-based adjustments to network weights and biases. Multiple iterative cycles of forward and backward computations constitute complete training epochs, enabling progressive parameter refinement until convergence criteria are satisfied.
The learning rate governs the magnitude of gradient-based parameter adjustments during optimization. Lower values typically enhance convergence stability at the cost of extended training duration, whereas higher values enable accelerated convergence while potentially introducing divergent behavior. This study employs an empirically determined learning rate of 0.001 throughout the training process.
The weight decay parameter determines the intensity of regularization applied during network optimization. To mitigate overfitting, a regularization technique progressively scales network parameters during optimization, effectively constraining model complexity. The optimal configuration was identified through systematic random exploration of hyperparameter combinations.
During neural network optimization, Dropout methodology is strategically implemented to temporarily deactivate randomized neuron subsets, thereby mitigating architectural complexity and preventing over-adaptation to training patterns. The dropout probability is configured at 0.1 in this experimental framework.
The mini-batch dimension determines the number of training samples processed per parameter update iteration. Excessively small batch sizes accelerate update frequency at the cost of computational efficiency, while disproportionately large batches may compromise convergence quality due to insufficient gradient updates. This study employs a batch configuration of 128 samples, achieving an optimal equilibrium between training velocity and parameter refinement for enhanced learning outcomes.
To balance testing accuracy with computational constraints, this study employs 300 training epochs, requiring approximately 45 min of processing time within the specified hardware configuration.
Following the LSTM layer, a fully connected layer containing 50 neurons processes the features before final regression through the output layer, ultimately yielding the State of Charge estimation.
The output layer comprises a solitary neuron dedicated to generating the State of Charge (SOC) estimate.
The architecture concludes with an integrated AKF module, which functions as a post-processing stage. It employs adaptive Kalman filtering to refine the sequence of SOC estimates generated by the LSTM output layer. This open-loop integration effectively resolves estimation instability inherent in the standalone CNN-LSTM framework while mitigating output fluctuations, thereby achieving enhanced precision in the final battery SOC determination.
The corresponding hyperparameter configurations are detailed in Table 3.
Table 3.
Model hyperparameter settings.
4. Experimental Results and Analysis
4.1. Evaluation Metrics
To comprehensively evaluate the SOC estimation accuracy across different models, this study employs a multi-dimensional assessment framework using Mean Absolute Error (MAE) and Root Mean Square Error (RMSE) as quantitative metrics. These indicators systematically measure the deviation between estimated SOC values and ground truth measurements. The mathematical formulations are presented below:
where represents the model’s estimated SOC readings, and corresponds to the actual measured values.
4.2. Estimation Performance of LSTM-AKF Across Temperature Conditions
Figure 5 presents the SOC estimation performance and corresponding deviations of both the LSTM-AKF model and the standalone LSTM framework at 0 °C, 25 °C, and 40 °C.
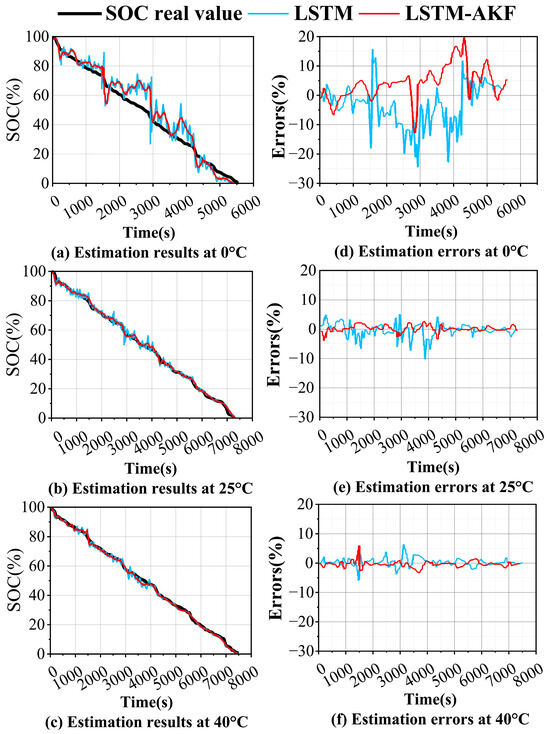
Figure 5.
SOC estimation results and errors of LSTM and LSTM-AKF at (a,d) 0 °C, (b,e) 25 °C, (c,f) 40 °C.
Under cryogenic conditions at 0 °C, as shown in Figure 5a,d, the standalone LSTM framework initially demonstrates satisfactory SOC approximation during early operational phases. However, beyond approximately 1500 s, its estimation trajectory exhibits substantial oscillations with progressively increasing deviation from reference values, revealing fundamental limitations in estimation stability. The AKF-enhanced LSTM variant demonstrates moderate improvement in oscillation damping characteristics. While exhibiting superior stability compared to the baseline LSTM architecture, the hybrid model still maintains considerable deviation from ground truth measurements. Quantitative analysis indicates the baseline LSTM’s error distribution primarily fluctuates within a ±20% range with high-frequency variations, whereas the AKF-integrated framework confines error dispersion to a −10% to 20% span while achieving notable oscillation frequency reduction.
At ambient temperature (25 °C), the battery system exhibits enhanced electrochemical stability. Moving to the results at 25 °C in Figure 5b,e, both estimation trajectories demonstrate closer alignment with ground truth SOC values compared to their 0 °C counterparts. Nevertheless, the standalone LSTM framework continues to display substantial fluctuation in its output. The AKF-enhanced variant generates comparatively smoother estimations, though minor oscillations persist in its predictive sequence. The baseline LSTM architecture maintains error boundaries predominantly within ±5%, while the AKF-integrated implementation further constrains deviations to within ±3%. When contrasted with the 0 °C error distribution, both methodologies exhibit noticeably reduced deviation ranges. These observations substantiate that thermal conditions represent a critical determinant influencing the precision of battery SOC estimation.
Under elevated temperature conditions at 40 °C, thermal elevation again enhances model estimation fidelity. As shown in Figure 5c,f, both architectures generate SOC predictions demonstrating close approximation to reference values, with certain trajectory segments exhibiting near-perfect overlap. This indicates substantially improved tracking capability with rising thermal energy, though both frameworks maintain minor oscillations beyond 1000 s and 3000 s timestamps. The conventional LSTM methodology confines most estimation errors within ±5% boundaries, while the AKF-augmented system demonstrates further improvement with deviations marginally contained within ±3% thresholds. The LSTM-AKF configuration achieves superior error stability, presenting the most restrained fluctuation characteristics among the evaluated systems.
Complementing the previously discussed SOC estimations at 0 °C, 25 °C, and 40 °C, Table 4 provides a systematic compilation of results obtained under additional temperature scenarios using the FUDS dataset, while Table 5 presents a comprehensive summary of performance metrics derived from the DST driving profile across varied thermal conditions.
Table 4.
SOC estimation results of LSTM-AKF at different temperatures (FUDS).
Table 5.
SOC estimation results of LSTM-AKF at different temperatures (DST).
For both the DST and FUDS driving profiles, the RMSE and MAE values in SOC estimation exhibit a consistent pattern of initial decline followed by subsequent increase as temperature rises.
During thermal progression from 0 °C to 40 °C, both architectures exhibited substantial error reduction, with the LSTM-AKF hybrid configuration demonstrating more pronounced error attenuation.
Within the 30–40 °C thermal range, both systems achieved performance nadir, where the LSTM-AKF framework attained 1.27% RMSE and 0.93% MAE—representing 46.41% RMSE improvement and 50.27% MAE enhancement relative to the reference LSTM benchmark.
When temperatures further increased to 50 °C, both models exhibited performance degradation with rising estimation errors. The predominant utilization of FUDS data in training resulted in notably larger deviations for DST profiles compared to FUDS evaluations. Furthermore, RMSE’s heightened sensitivity to outliers amplifies the impact of data dispersion, yielding comparatively higher values than MAE which maintains equal weighting across all error instances.
4.3. LSTM-AKF Estimation Accuracy Across Varying Initial SOC Conditions
During unexpected power disruptions or system malfunctions, battery systems may experience loss of stored SOC data. Upon restoration procedures, the initialized SOC value may deviate from the battery’s actual charge state. Consequently, accurate SOC determination must account for initial condition discrepancies. To evaluate the resilience of the LSTM-AKF framework across varying initialization scenarios, systematic tests were conducted with initial SOC configurations of 100%, 80%, and 60% under optimal thermal conditions (30 °C) using DST profiles. This experimental design enables critical assessment of the model’s convergence characteristics during initial operational phases. The empirical outcomes are visualized in Figure 6.
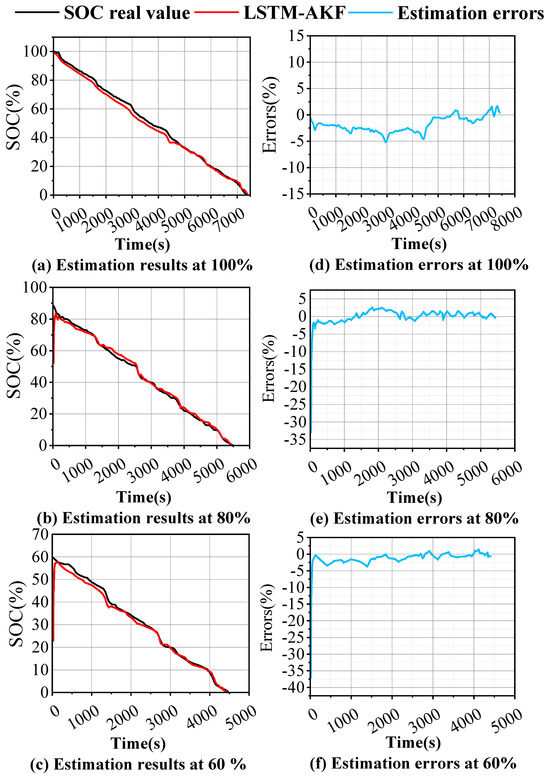
Figure 6.
SOC estimation results and errors of LSTM-AKF for SOC initial values of (a,d) 100%, (b,e) 80%, (c,f) 60%.
For SOC estimation with 100% initial value, the issue of starting discrepancy remains negligible, attributed to the model’s exclusive training on data sequences spanning from full charge (100% SOC) to complete depletion (0% SOC), thereby ensuring satisfactory estimation accuracy.
When SOC initialization values were configured at 80% or 60%, the LSTM-AKF framework demonstrated suboptimal performance during preliminary estimation phases, exhibiting convergence latency with stabilization periods of 76 and 141 s, respectively, before approaching actual values, accompanied by comparatively elevated aggregate error margins. These findings indicate that continued methodological refinements are necessary to mitigate estimation inaccuracies and enhance operational resilience across diverse initialization scenarios.
4.4. CNN-LSTM-AKF Estimation Accuracy Across Varying Initial SOC Conditions
To enhance the estimation precision, adaptability, and robustness of the LSTM-AKF framework, this investigation examines the convergence behavior of the CNN-LSTM-AKF architecture under varying starting conditions. Systematic evaluation was performed using initial SOC configurations of 100%, 80%, and 60% with US06 driving profiles at 30 °C. The experimental outcomes are documented in Figure 7.
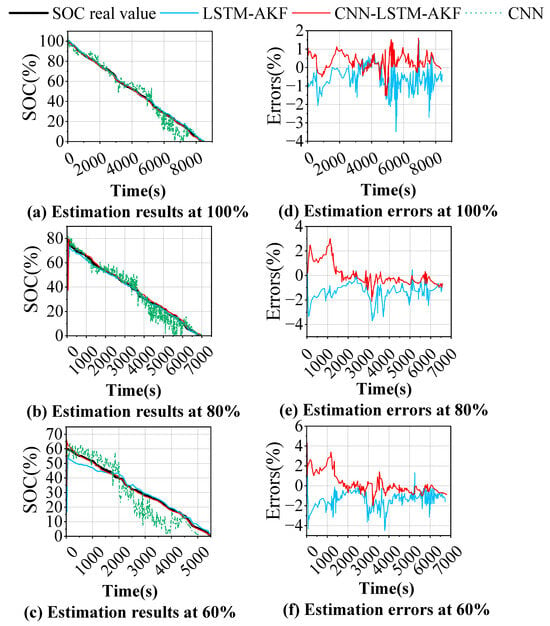
Figure 7.
SOC estimation results and errors of LSTM-AKF and CNN-LSTM-AKF for SOC initial values of (a,d) 100%, (b,e) 80%, (c,f) 60%.
Figure 7a presents the estimation outcomes with full initial charge (100% SOC). During initial operational phases, all three architectures maintain close alignment with reference SOC values, indicating satisfactory estimation accuracy under high-charge conditions. As the temporal sequence progresses into intermediate and advanced stages, both standalone CNN and LSTM-AKF frameworks develop increasing oscillations and deviations, particularly evident near the 5000 s mark. The CNN configuration demonstrates pronounced fluctuations, suggesting inadequate capture of certain transitional characteristics during charge depletion. While the LSTM-AKF hybrid exhibits relatively moderated instability, the CNN-LSTM-AKF architecture maintains consistent estimation stability beyond the 5000 s threshold, demonstrating superior resilience to capacity-dependent variations. With initial SOC configured at 80%, in Figure 7b,e, the LSTM-AKF framework exhibited initial estimation deviations and slower convergence, requiring approximately 52 s to approach reference values.
Corresponding error analysis in Figure 7d reveals comparable fluctuation ranges between LSTM-AKF and CNN-LSTM-AKF frameworks. However, the enhanced CNN-LSTM-AKF configuration consistently confines deviations within 2% thresholds, whereas the LSTM-AKF network exhibits peak errors exceeding 3%. These findings demonstrate the refined architecture’s superior immunity to interference and measurement noise, maintaining estimation consistency and precision that collectively outperform both standalone CNN and LSTM-AKF benchmarks.
Figure 7b displays estimation outcomes with SOC initialization at 80%. Under this configuration, all models demonstrate performance characteristics distinct from the 100% initialization scenario. The standalone CNN framework demonstrated persistent volatility throughout the estimation timeline, though it effectively captured data patterns during the initial 0–1500 s period without significant deviation. Beyond approximately 2000 s, its estimation accuracy progressively deteriorated. The LSTM-AKF hybrid exhibited initial convergence limitations, requiring approximately 52 s to approach reference values, followed by minor trajectory divergence around 2900 s. In contrast, the CNN-LSTM-AKF architecture achieved substantially accelerated convergence, stabilizing within about 20 s during preliminary operation.
Figure 7e reveals that both CNN-LSTM-AKF and LSTM-AKF frameworks maintain error fluctuations primarily distributed within the −4% to +4% range. Significant deviations were observed during the initial phase (0–1500 s) for both configurations. As the operational timeline progressed into intermediate and final stages, the error trajectories gradually converged, indicating enhanced system adaptation through continuous learning from battery data streams. The CNN-LSTM-AKF architecture demonstrated sustained proximity to the zero-error baseline beyond the initial phase, achieving notably lower error magnitudes than the LSTM-AKF benchmark. Quantitative evaluation recorded 0.93% RMSE and 0.65% MAE for the enhanced framework, outperforming the LSTM-AKF configuration which yielded 1.63% RMSE and 1.41% MAE. These outcomes demonstrate the standalone CNN model preserves functional stability during SOC initialization despite considerable error oscillations. The refined CNN-LSTM-AKF hybrid achieves accelerated initial convergence toward reference SOC values with reduced aggregate error propagation compared to LSTM-AKF, confirming its dynamic adaptation capability in evolving operational environments.
Figure 7c presents the estimation performance with an initial SOC of 60%. Comparative analysis with Figure 7b (80% initial SOC) reveals that all model variants produced remarkably similar estimation trajectories. The standalone CNN framework maintained its characteristic oscillations around the reference SOC curve, demonstrating enhanced fluctuation amplitude while effectively capturing data patterns during initial phases to rapidly approximate the reference values. The LSTM-AKF configuration continued to exhibit persistent limitation in initial convergence speed, requiring approximately 43 s to approach actual values, with moderate trajectory divergence in later stages despite maintaining acceptable overall precision. In contrast, the CNN-LSTM-AKF architecture achieved reference value convergence within 25 s, with its estimation curve demonstrating near-perfect alignment with the actual SOC progression throughout the operational timeline.
Error analysis in Figure 7f indicates both CNN-LSTM-AKF and LSTM-AKF frameworks maintain deviation ranges predominantly within −4.2% to +4.5%. Beyond the 1500 s mark, the enhanced architecture demonstrates progressively converging errors toward the zero baseline, whereas the LSTM-AKF variant exhibits persistently divergent fluctuations. Quantitative assessment records 1.01% RMSE and 0.68% MAE for the proposed framework, while the comparative model yields 1.78% RMSE and 1.15% MAE. These outcomes confirm the CNN-LSTM-AKF configuration’s superior estimation fidelity across diverse initialization scenarios, demonstrating robust generalization capability through its sustained precision and adaptive characteristics.
Complementing the detailed analysis of estimation performance across varying initial SOC conditions, Table 6 consolidates experimental outcomes spanning initial SOC levels from 100% to 40%. The consolidated data reveals the CNN-LSTM-AKF framework consistently sustains superior performance, maintaining RMSE below 1.56% and MAE under 0.77% across all initialization scenarios.
Table 6.
RMSE and MAE of models in different initial states.
In summary, experimental validation under US06 driving profiles at 30 °C demonstrates that the enhanced CNN-LSTM-AKF architecture effectively tracks actual SOC values while exhibiting responsive adaptation to varying initial SOC conditions. The framework achieves accelerated convergence rates, demonstrating particular suitability for dynamically changing operational environments. These findings validate the feasibility of integrating diverse neural network technologies, with the proposed model exhibiting high precision, strong adaptability, and robust performance characteristics.
4.5. Estimation Performance of CNN-LSTM-AKF Across Temperature Conditions
To comprehensively investigate how thermal conditions influence the operational efficacy of the CNN-LSTM-AKF framework and enhance its capability to adapt and model battery dynamics across diverse temperature ranges, systematic training and evaluation were conducted using FUDS operational profiles under varied thermal settings. Experimental parameters were standardized with fixed 100% SOC initialization to ensure variable isolation. The resultant performance metrics are documented in Figure 8.
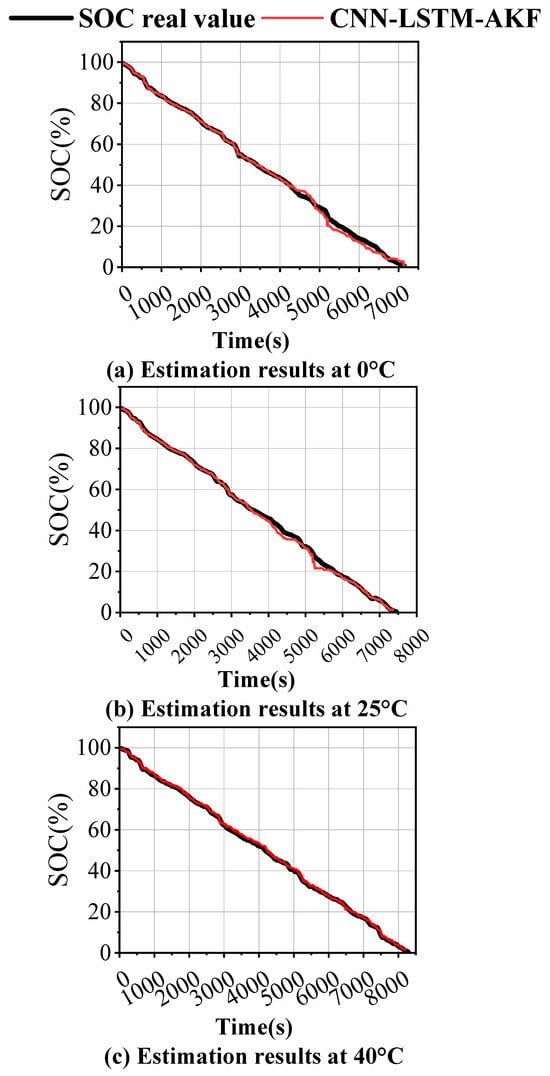
Figure 8.
SOC estimation results of CNN-LSTM-AKF at (a) 0 °C, (b) 25 °C, (c) 40 °C.
At 0 °C, the estimation trajectory maintains near-perfect alignment with the reference SOC values throughout early and middle phases, exhibiting only minor deviation after approximately 4500 s. This behavioral pattern demonstrates the CNN-LSTM-AKF framework’s capacity to generate highly accurate SOC approximations under cryogenic conditions.
At 25 °C ambient temperature, the CNN-LSTM-AKF estimation curve demonstrates near-perfect alignment with the actual SOC measurements during both initial and final operational phases, exhibiting minimal divergence only at the mid-phase around 4000 s. The framework achieves superior SOC estimation accuracy compared to its performance at 0 °C conditions.
At an elevated temperature of 40 °C, the CNN-LSTM-AKF framework demonstrates exceptional congruence with reference SOC values throughout the entire discharge timeline, contrasting with earlier evaluations at 0 °C and 25 °C. The complete discharge duration extended to approximately 8500 s under these conditions. This phenomenon can be attributed to accelerated electrochemical kinetics at higher temperatures, which typically reduces internal resistance and may temporarily enhance both available power output and effective capacity.
Table 7 compiles the Root Mean Square Error (RMSE) and Mean Absolute Error (MAE) metrics for the CNN-LSTM-AKF model evaluated under varying thermal conditions using the Federal Urban Driving Schedule (FUDS) dataset.
Table 7.
RMSE and MAE of CNN-LSTM-AKF in different temperature.
The tabulated data reveals temperature’s substantial impact on SOC estimation precision, with the proposed CNN-LSTM-AKF framework maintaining RMSE below 1.51% and MAE under 1.18% across all evaluated thermal conditions.
The observed non-monotonic pattern in SOC estimation errors demonstrates initial improvement followed by marginal degradation with thermal elevation. At 25 °C ambient conditions, the recorded RMSE and MAE performance metrics reflect intermediate accuracy levels, indicating that room-temperature operation yields satisfactory SOC determination while not representing the optimal scenario.
The CNN-LSTM-AKF architecture attained peak performance at 40 °C, achieving RMSE and MAE values of 0.69% and 0.51%, respectively.
At 50 °C, the model exhibits marginal elevation in RMSE and MAE values, though these deviations remain comparatively lower than those recorded at 0 °C, 10 °C, and 20 °C operational conditions.
The marginal increase in RMSE at 50 °C, compared to the optimal performance at 40 °C, is hypothesized to stem from minor, accelerated electrochemical degradation or side reactions occurring within the battery during the high-temperature test cycle. These subtle, intra-cycle aging effects, which are not explicitly captured in the model’s training data, may slightly alter the underlying voltage-current relationship, thereby introducing an additional source of estimation error at the most extreme temperature.
In summary, across cryogenic, ambient, and elevated temperature regimes, the proposed CNN-LSTM-AKF architecture consistently delivers precise SOC determination while demonstrating exceptional thermal resilience, outperforming both standalone LSTM and LSTM-AKF benchmarks.
5. Conclusions
5.1. Summary
To enhance the accuracy of battery State of Charge (SOC) estimation, this study addresses lithium-ion battery SOC assessment through the following key contributions:
- (1)
- The investigation focuses on LSTM architecture enhancement through integration with Adaptive Kalman Filter theory, establishing a novel LSTM-AKF framework. This hybrid configuration enables dynamic recalibration of noise statistics through autonomous adjustment of process and measurement noise covariance matrices, effectively addressing battery data nonlinearity and parameter time-variance to achieve improved SOC estimation precision and robustness. Under FUDS testing conditions, the LSTM-AKF framework demonstrates marked error reduction across low-to-moderate temperature ranges (0 °C to 40 °C), reaching optimal performance at 30 °C with recorded RMSE and MAE values of 1.27% and 0.93%, respectively—significantly outperforming standalone LSTM results of 2.37% RMSE and 1.87% MAE. While both architectures exhibit slight performance degradation at 50 °C, the overall temperature-dependent error progression follows a characteristic pattern of initial decline followed by subsequent increase. Identical experimental protocols using DST datasets reveal consistent behavioral trends, confirming the stabilizing effect of AKF filtering on LSTM outputs while validating the hybrid model’s thermal adaptability and generalization capability across varying operational conditions.
- (2)
- To assess the resilience and generalization capability of the proposed methodology under varying initial conditions, the estimation performance of LSTM-AKF was examined across different initialization states. With full initialization (100% SOC), minimal initial deviation was observed. However, when initialized at 80% or 60% SOC levels, the framework demonstrated suboptimal performance during initial estimation phases, characterized by delayed convergence toward actual measurements and elevated aggregate error. These findings indicate that the LSTM-AKF architecture requires further refinement to effectively handle diverse initial SOC conditions.
- (3)
- To address the convergence latency of LSTM-AKF under varying initial SOC conditions while enhancing estimation precision, adaptability, and robustness, a hybrid CNN-LSTM-AKF architecture was developed. This integrated framework leverages CNN’s proficiency in spatial pattern recognition, LSTM’s temporal modeling capabilities, and AKF’s output oscillation suppression. Systematic evaluation was conducted using the US06 driving profile with initial SOC values spanning 100%, 80%, 60%, and 40%. Experimental results demonstrate accelerated initial response and superior tracking capability compared to standalone LSTM-AKF, with consistent performance excellence across all initialization scenarios. The proposed architecture maintained maximum RMSE below 1.56% and MAE under 0.77%, establishing new benchmarks for initialization robustness.
- (4)
- To systematically evaluate thermal effects on the proposed framework, the CNN-LSTM-AKF architecture was validated using FUDS operational profiles. Experimental observations revealed elevated RMSE and MAE readings at lower temperature regimes (0 °C and 10 °C). As temperatures increased through the 20 °C to 40 °C spectrum, estimation precision progressively improved with descending error metrics. Although a minor error resurgence occurred at 50 °C, the recorded deviations remained comparatively lower than those documented at 0 °C, 10 °C, 20 °C, and 30 °C benchmarks. These findings demonstrate consistent SOC estimation capability across cryogenic, ambient, and elevated thermal conditions, confirming the framework’s operational resilience across diverse thermal environments.
In summary, the enhanced CNN-LSTM-AKF framework demonstrates superior accuracy, exceptional adaptability, and robust performance characteristics.
5.2. Future Work
Future work will include a comprehensive benchmark study, where the proposed CNN-LSTM-AKF model will be compared against other advanced hybrid architectures from the literature (e.g., LSTM-GRU, Attention-based CNN-LSTM) on a unified, publicly available dataset under standardized testing protocols to further validate its relative performance and advantages.
While this study demonstrates the effectiveness of the proposed CNN-LSTM-AKF model across a range of temperatures and initial states, further research is warranted to explore its limits and robustness. Future work will focus on two main directions:
- (1)
- Extreme Low-Temperature Validation: Testing the model’s performance in environments below −10 °C, which are critical for electric vehicles in frigid climates, to further challenge its low-temperature adaptability.
- (2)
- Aging and Generalization: Investigating the model’s accuracy throughout the entire battery lifecycle by incorporating state-of-health (SOH) estimation and evaluating its generalization capability to different battery chemistries and formats. Addressing these aspects will be crucial for the deployment of the model in real-world, long-term BMS applications.
5.3. Practical Implementation Considerations
The transition of the proposed CNN-LSTM-AKF model from a research prototype to a core component of a practical BMS necessitates consideration of computational load and real-time capability. While the training process is computationally intensive and performed offline, the inference process is markedly more efficient. The forward pass through the network involves a fixed sequence of convolutional, recurrent, and matrix operations, which can be highly optimized for the low-power microcontrollers (MCUs) prevalent in modern BMS. The model’s causal structure, relying only on present and past inputs, makes it inherently suitable for real-time estimation. A feasible deployment strategy would involve pre-training the model offline and storing the final weights within the BMS firmware. For high-volume applications, further model compression techniques such as pruning and quantization could be explored to minimize the computational footprint and memory usage, ensuring swift inference without compromising reliability. Future work will focus on porting and benchmarking the inference engine on embedded hardware and, as highlighted throughout, rigorously validating its performance under critical conditions such as sub-zero temperatures and battery aging to fully establish its robustness for automotive applications.
Author Contributions
H.X.: Conceptualization (equal), investigation (equal), Data Curation (equal), Writing—Original Draft, Writing—Review and Editing. F.Z.: Conceptualization (equal), investigation (equal), Data Curation (equal). Y.G.: Conceptualization (equal), Supervision (equal). All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Project of Shanghai Municipal Science and Technology Commission, (Grant No. 19195810800), and the National Natural Science Foundation of China, (Grant No.51606116, No.52476212).
Data Availability Statement
The data used in this study are publicly available.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wang, Z.; Song, Y.; Zhao, Q.; Shi, B.; He, J.; Li, J. Unveiling the electrochemical degradation behavior of 18650 lithium-ion batteries involved different humidity conditions. J. Power Sources 2025, 630, 236185. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, R.; Du, X.; Zhao, K.; Qie, X.; Zhang, X. Does Low-Carbon City Construction Promote Integrated Economic, Energy, and Environmental Development? An Empirical Study Based on the Low-Carbon City Pilot Policy in China. Sustainability 2023, 15, 16241. [Google Scholar] [CrossRef]
- Waseem, M.; Lakshmi, G.S.; Amir, M.; Ahmad, M.; Suhaib, M. Advancement in battery health monitoring methods for electric vehicles: Battery modelling, state estimation, and internet-of-things based methods. J. Power Sources 2025, 633, 236414. [Google Scholar] [CrossRef]
- Kouzelis, A.; Linders, K.; Bandyopadhyay, S.; Mouli, G.R.C. Analysis of vehicle-integrated photovoltaics and vehicle-to-grid on electric vehicle battery life. J. Power Sources 2025, 631, 236117. [Google Scholar] [CrossRef]
- Veza, I.; Syaifuddin, M.; Idris, M.; Herawan, S.G.; Yusuf, A.A.; Fattah, I.M.R. Electric Vehicle (EV) Review: Bibliometric Analysis of Electric Vehicle Trend, Policy, Lithium-Ion Battery, Battery Management, Charging Infrastructure, Smart Charging, and Electric Vehicle-to-Everything (V2X). Energies 2024, 17, 3786. [Google Scholar] [CrossRef]
- Williams, D.; Green, J.; Bugryniec, P.; Brown, S.; Dwyer-Joyce, R. Battery age monitoring: Ultrasonic monitoring of ageing and degradation in lithium-ion batteries. J. Power Sources 2025, 631, 236174. [Google Scholar] [CrossRef]
- Qiu, Y.; Wen, S.; Zhao, Q.; Zhang, B.; Wu, G.; Zhu, M. Multi-model deep learning-based state of charge estimation for shipboard lithium batteries with feature extraction and Spatio-temporal dependency. J. Power Sources 2025, 629, 235983. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.; Ayob, A.; Lipu, M.H.; Ansari, S.; Kiong, T.S.; Saad, M.H.M.; Ustun, T.S.; Kalam, A. Advanced data-driven fault diagnosis in lithium-ion battery management systems for electric vehicles: Progress, challenges, and future perspectives. eTransportation 2024, 22, 100374. [Google Scholar] [CrossRef]
- Dou, Z.; Li, J.; Yan, H.; Zhang, C.; Liu, F. Real-Time Online Estimation Technology and Implementation of State of Charge State of Uncrewed Aerial Vehicle Lithium Battery. Energies 2024, 17, 803. [Google Scholar] [CrossRef]
- Zhao, F.; Guo, Y.; Chen, B. A Review of Lithium-Ion Battery State of Charge Estimation Methods Based on Machine Learning. World Electr. Veh. J. 2024, 15, 131. [Google Scholar] [CrossRef]
- Zhu, J.; Knapp, M.; Sørensen, D.R.; Heere, M.; Darma, M.S.; Müller, M.; Mereacre, L.; Dai, H.; Senyshyn, A.; Wei, X.; et al. Investigation of capacity fade for 18650-type lithium-ion batteries cycled in different state of charge (SoC) ranges. J. Power Sources 2021, 489, 229422. [Google Scholar] [CrossRef]
- Liu, D.; Wang, S.; Fan, Y.; Xia, L.; Qiu, J. A novel fuzzy-extended Kalman filter-ampere-hour (F-EKF-Ah) algorithm based on improved second-order PNGV model to estimate state of charge of lithium-ion batteries. Int. J. Circuit Theory Appl. 2022, 50, 3811–3826. [Google Scholar] [CrossRef]
- Ren, L.; Zhu, G.; Wang, J.V.; Luo, B.; Kang, J. Comparison of robustness of different state of charge estimation algorithms. J. Power Sources 2020, 478, 228767. [Google Scholar] [CrossRef]
- Xiong, Y.; Shi, Q.; Shen, L.; Chen, C.; Lu, W.; Xu, C. A hybrid neural network based on KF-SA-Transformer for SOC prediction of lithium-ion battery energy storage systems. Front. Energy Res. 2024, 12, 1424204. [Google Scholar] [CrossRef]
- Qiao, X.; Wang, Z.; Hou, E.; Liu, G.; Cai, Y. Online Estimation of Open Circuit Voltage Based on Extended Kalman Filter with Self-Evaluation Criterion. Energies 2022, 15, 4373. [Google Scholar] [CrossRef]
- Silva-Vera, E.D.; Valdez-Resendiz, J.E.; Escobar, G.; Guillen, D.; Rosas-Caro, J.C.; Sosa, J.M. Data-Driven Modeling and Open-Circuit Voltage Estimation of Lithium-Ion Batteries. Mathematics 2024, 12, 2880. [Google Scholar] [CrossRef]
- Zhuang, Y.; Xu, L.; Deng, Z.; Xie, Y.; Li, J.; Hu, X. A novel nonlinearity-aware adaptive observer for estimating surface concentration and state of charge of lithium-ion batteries. J. Power Sources 2024, 602, 234373. [Google Scholar] [CrossRef]
- Wang, W.; Fu, R. Stability Analysis of EKF-Based SOC Observer for Lithium-Ion Battery. Energies 2023, 16, 5946. [Google Scholar] [CrossRef]
- Goshtasbi, A.; Zhao, R.; Wang, R.; Han, S.; Ma, W.; Neubauer, J. Enhanced equivalent circuit model for high current discharge of lithium-ion batteries with application to electric vertical takeoff and landing aircraft. J. Power Sources 2024, 620, 235188. [Google Scholar] [CrossRef]
- Tang, A.; Huang, Y.; Liu, S.; Yu, Q.; Shen, W.; Xiong, R. A novel lithium-ion battery state of charge estimation method based on the fusion of neural network and equivalent circuit models. Appl. Energy 2023, 348, 121578. [Google Scholar] [CrossRef]
- Sun, H.; Tian, W.; Yue, J.; Su, F. Lithium-ion battery heterogeneous electrochemical-thermal-mechanical multiphysics coupling model and characterization of microscopic properties. J. Power Sources 2025, 629, 235970. [Google Scholar] [CrossRef]
- Wang, J.; Peng, Q.; Meng, J.; Liu, T.; Peng, J.; Teodorescu, R. A physics-informed neural network approach to parameter estimation of lithium-ion battery electrochemical model. J. Power Sources 2024, 621, 235271. [Google Scholar] [CrossRef]
- Dar, T.H.; Singh, S. Advanced integration of bidirectional long short-term memory neural networks and innovative extended Kalman filter for state of charge estimation of lithium-ion battery. J. Power Sources 2025, 628, 235893. [Google Scholar] [CrossRef]
- Zhang, W.; Ahmed, R.; Habibi, S. State-of-health estimation for lithium-ion batteries based on electrochemical impedance spectroscopy measurements combined with unscented Kalman filter. J. Power Sources 2025, 625, 235450. [Google Scholar] [CrossRef]
- Yun, X.; Zhang, X.; Wang, C.; Fan, X. Online parameters identification and state of charge estimation for lithium-ion batteries based on improved central difference particle filter. J. Energy Storage 2023, 70, 107987. [Google Scholar] [CrossRef]
- Li, H.; Qu, Z.; Xu, T.; Wang, Y.; Fan, X.; Jiang, H.; Yuan, C.; Chen, L. SOC estimation based on the gas-liquid dynamics model using particle filter algorithm. Int. J. Energy Res. 2022, 46, 22913–22925. [Google Scholar] [CrossRef]
- Du, Y.; Cui, N.; Cui, W.; Chen, Z.; Zhang, C. Receding horizon control based energy management strategy for PHEB using GRU deep learning predictive model. eTransportation 2022, 13, 100179. [Google Scholar] [CrossRef]
- Sesidhar, D.V.S.R.; Chandrashekhar, B.; Green, R.C., II. A review on data-driven SOC estimation with Li-Ion batteries: Implementation methods & future aspirations. J. Energy Storage 2023, 72, 108420. [Google Scholar] [CrossRef]
- Kröger, T.; Belnarsch, A.; Bilfinger, P.; Ratzke, W.; Lienkamp, M. Collaborative training of deep neural networks for the lithium-ion battery aging prediction with federated learning. eTransportation 2023, 18, 100294. [Google Scholar] [CrossRef]
- Yu, H.; Lu, H.; Zhang, Z.; Yang, L. A generic fusion framework integrating deep learning and Kalman filter for state of charge estimation of lithium-ion batteries: Analysis and comparison. J. Power Sources 2024, 623, 235493. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, C.; Chen, C.; Lu, C.; Xuan, D. State-of-charge estimation of lithium-ion batteries using convolutional neural network with self-attention mechanism. J. Electrochem. Energy Convers. Storage 2022, 20, 031010. [Google Scholar] [CrossRef]
- Tao, S.; Jiang, B.; Wei, X.; Dai, H. A Systematic and Comparative Study of Distinct Recurrent Neural Networks for Lithium-Ion Battery State-of-Charge Estimation in Electric Vehicles. Energies 2023, 16, 2008. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, J.; Wang, Z.; Jiang, Y. Study of SOC Estimation by the Ampere-Hour Integral Method with Capacity Correction Based on LSTM. Batteries 2022, 8, 170. [Google Scholar] [CrossRef]
- Ma, L.; Hu, C.; Cheng, F. State of Charge and State of Energy Estimation for Lithium-Ion Batteries Based on a Long Short-Term Memory Neural Network. J. Energy Storage 2021, 37, 102440. [Google Scholar] [CrossRef]
- Bian, C.; He, H.; Yang, S. Stacked bidirectional long short-term memory networks for state-of-charge estimation of lithium-ion batteries. Energy 2020, 191, 116538. [Google Scholar] [CrossRef]
- Hong, J.; Liang, F.; Yang, H.; Zhang, C.; Zhang, X.; Zhang, H.; Wang, W.; Li, K.; Yang, J. Multi- forword-step state of charge prediction for real-world electric vehicles battery systems using a novel LSTM-GRU hybrid neural network. eTransportation 2024, 20, 100322. [Google Scholar] [CrossRef]
- Zhao, H.; Liao, C.; Zhang, C.; Wang, L.; Wang, L. State-of-charge estimation of lithium-ion battery: Joint long short-term memory network and adaptive extended Kalman filter online estimation algorithm. J. Power Sources 2024, 604, 234451. [Google Scholar] [CrossRef]
- Sun, J.; Ren, S.; Shang, Y.; Zhang, X.; Liu, Y.; Wang, D. A novel fault prediction method based on convolutional neural network and long short-term memory with correlation coefficient for lithium-ion battery. J. Energy Storage 2023, 62, 106811. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, L.; Yu, Q.; Liu, S.; Zhou, G.; Shen, W. State of charge estimation for lithium-ion batteries based on cross-domain transfer learning with feedback mechanism. J. Energy Storage 2023, 70, 108037. [Google Scholar] [CrossRef]
- Chen, G.; Peng, W.; Yang, F. An LSTM-SA model for SOC estimation of lithium-ion batteries under various temperatures and aging levels. J. Energy Storage 2024, 84, 110906. [Google Scholar] [CrossRef]
- Zou, M.; Wang, J.; Yan, D.; Li, Y.; Tang, X. Novel state of charge estimation method of containerized Lithium–Ion battery energy storage system based on deep learning. J. Power Sources 2024, 624, 235609. [Google Scholar] [CrossRef]
- Pillai, P.; Sundaresan, S.; Kumar, P.; Pattipati, K.R.; Balasingam, B. Open-Circuit Voltage Models for Battery Management Systems: A Review. Energies 2022, 15, 6803. [Google Scholar] [CrossRef]
- CALCE. Lithium-Ion Battery Experimental Data [EB/OL]. Battery Data|Center for Advanced Life Cycle Engineering. Available online: https://calce.umd.edu/battery-data (accessed on 20 March 2024).
- Yuan, T.; Gao, F.; Bai, J.; Sun, H. A lithium-ion battery state of health estimation method utilizing convolutional neural networks and bidirectional long short-term memory with attention mechanisms for collaborative defense against false data injection cyber-attacks. J. Power Sources 2025, 631, 236193. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).