
Adomian Decomposition, Firing Change Process Analysis and Synchronous Control of Fractional-Order Hindmarsh–Rose Neurons in Electromagnetic Field


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Solution of Fractional-Order HR Neuron
2.1. Adomian Decomposition Method
2.2. HR Neuron Model
2.3. Fractional-Order HR Neuron Model
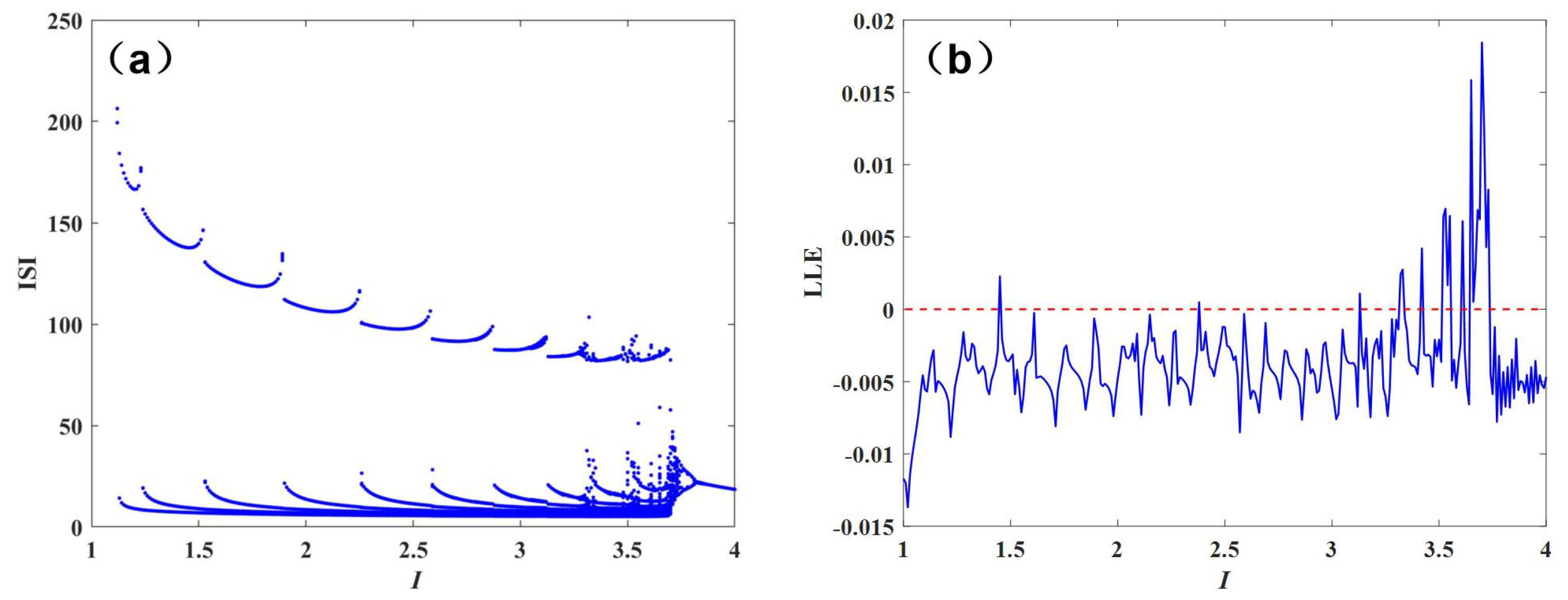
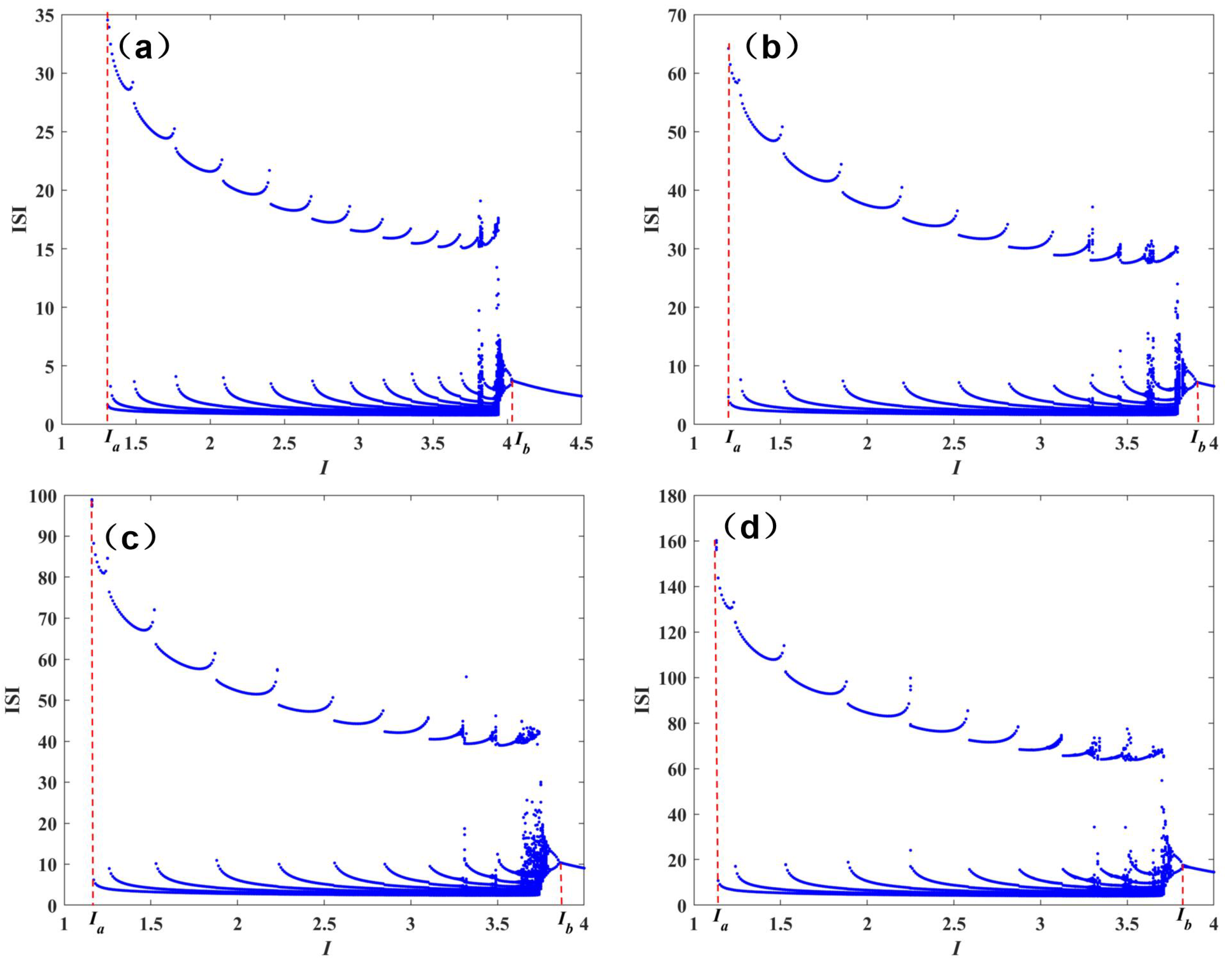
3. Firing Characteristic Analysis
3.1. Calculation of Lyapunov Exponent of Fractional-Order System
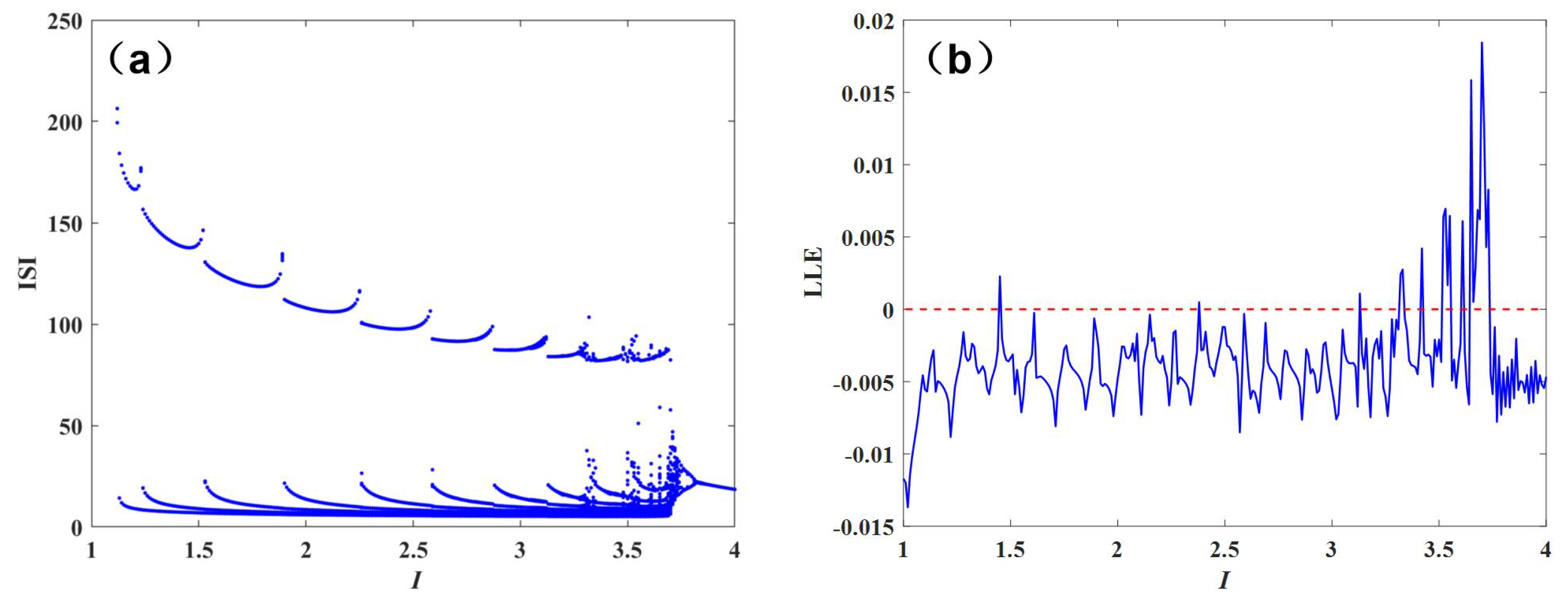
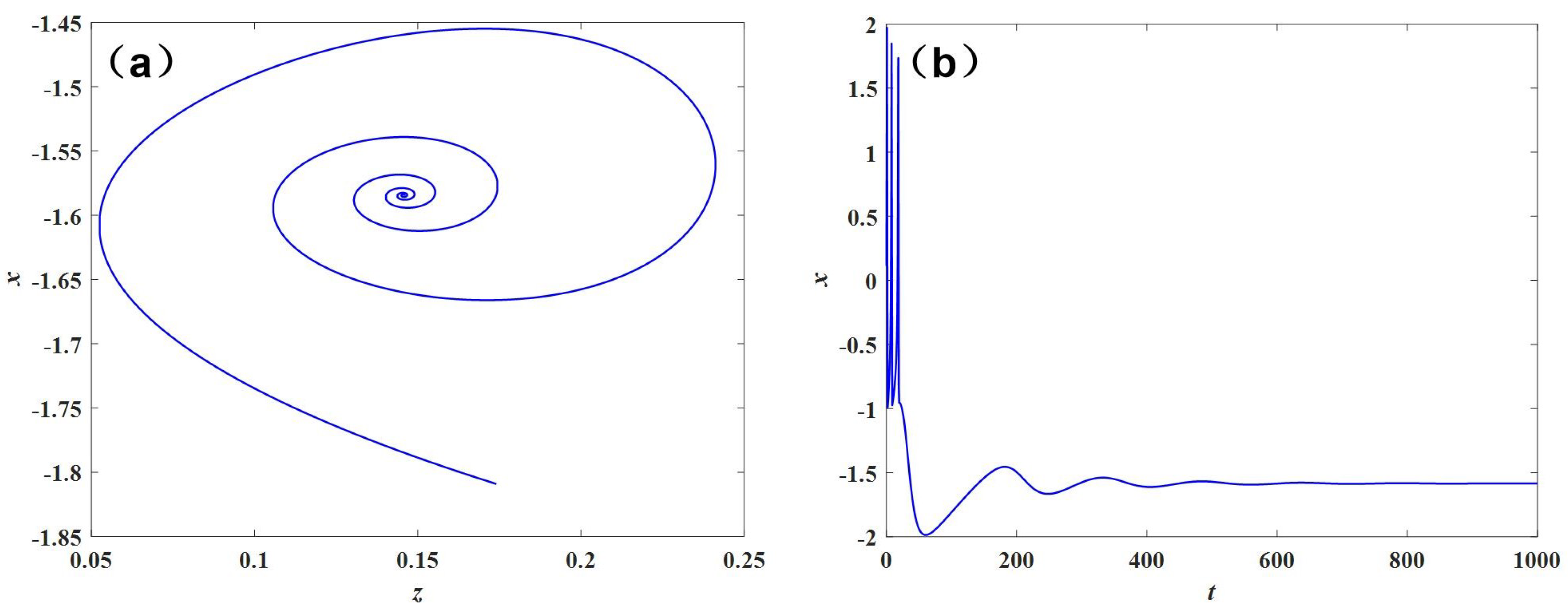
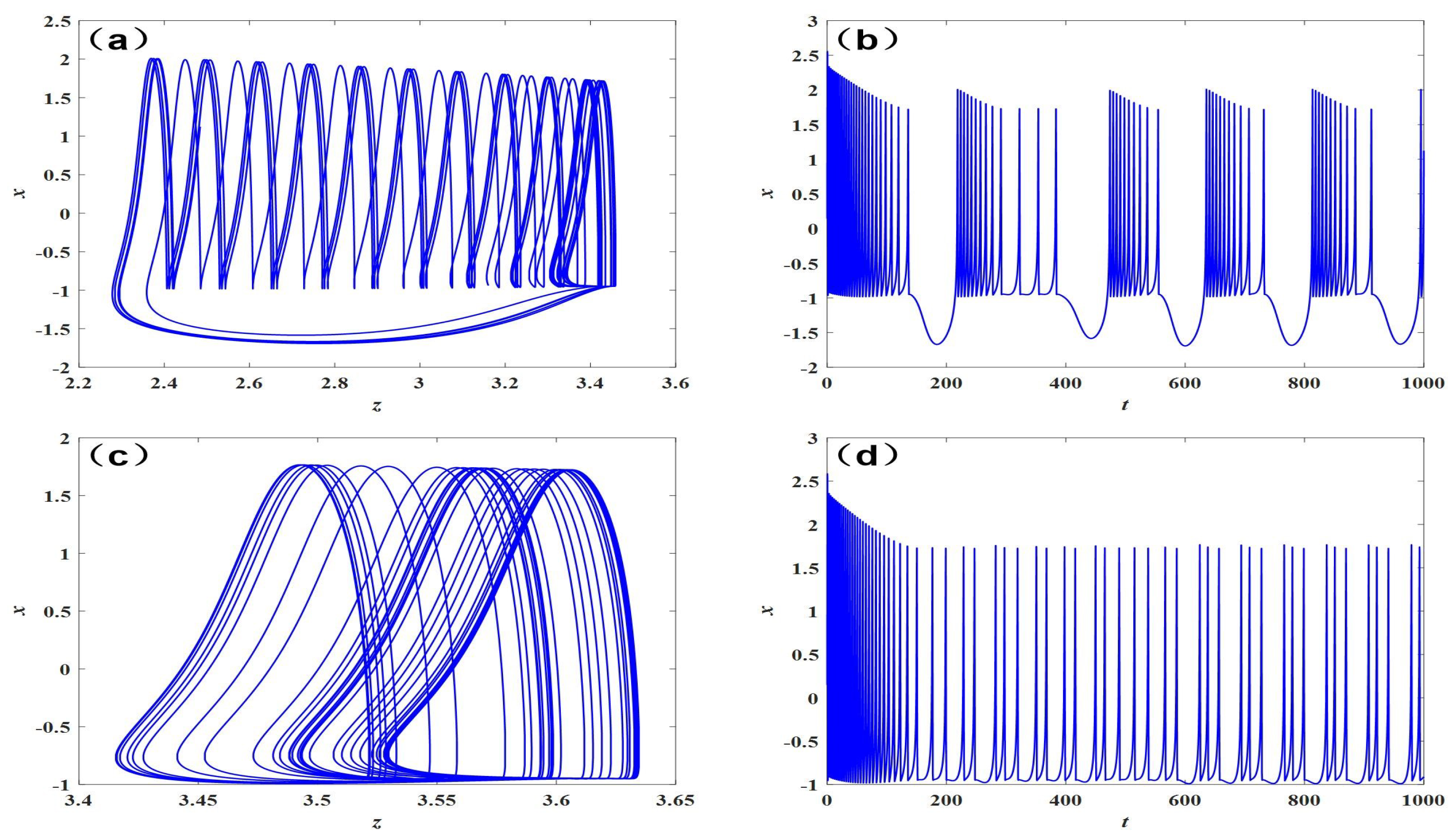
3.2. Firing Characteristic Analysis
4. Design of Sliding Mode Controller
4.1. Full Controller
- (1)
- (2)
- ;
- (3)
- ;
4.2. Under Controller
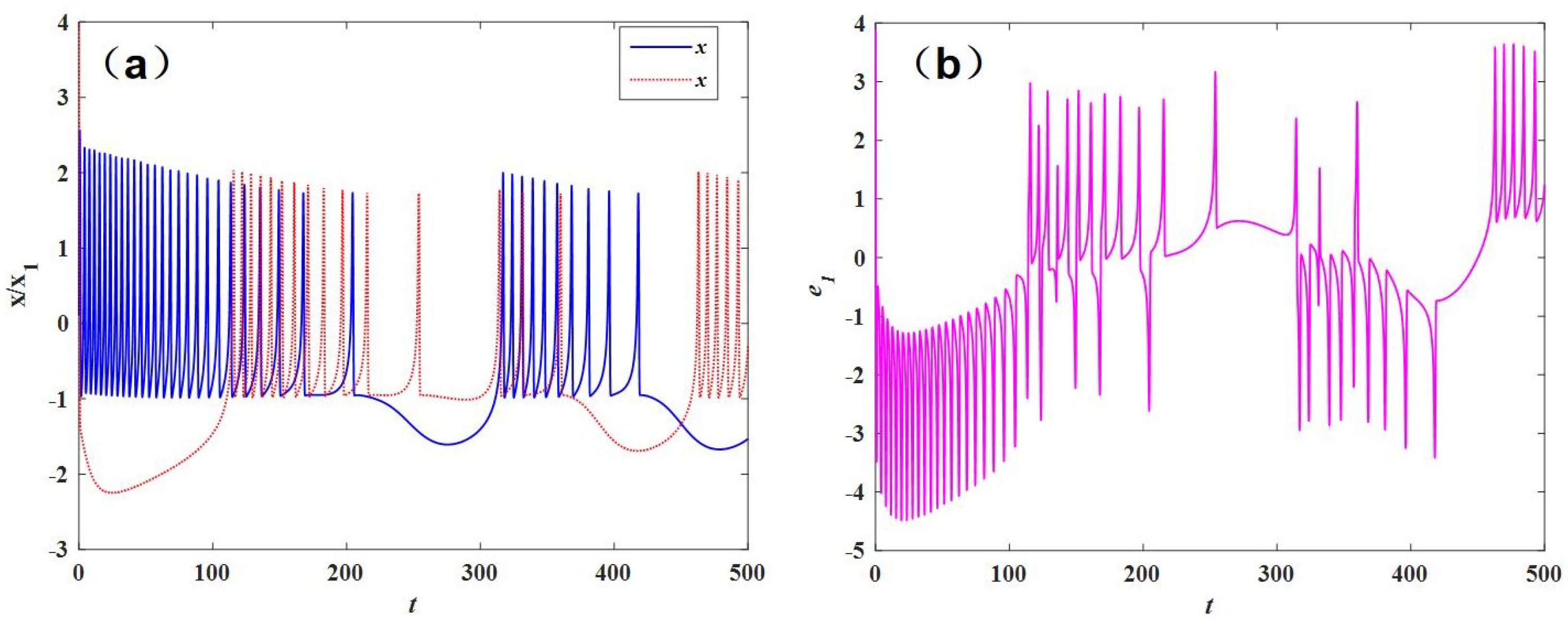
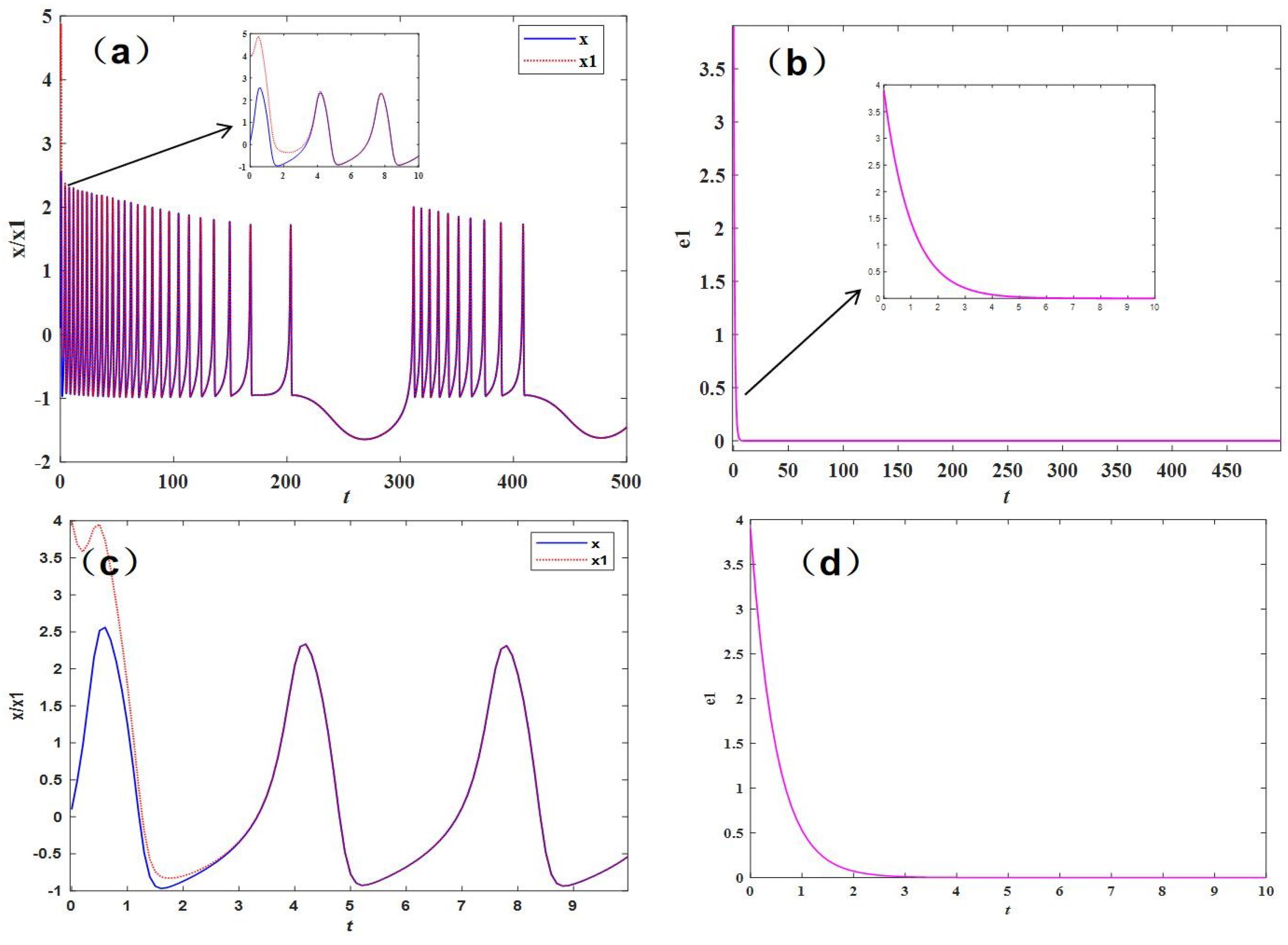
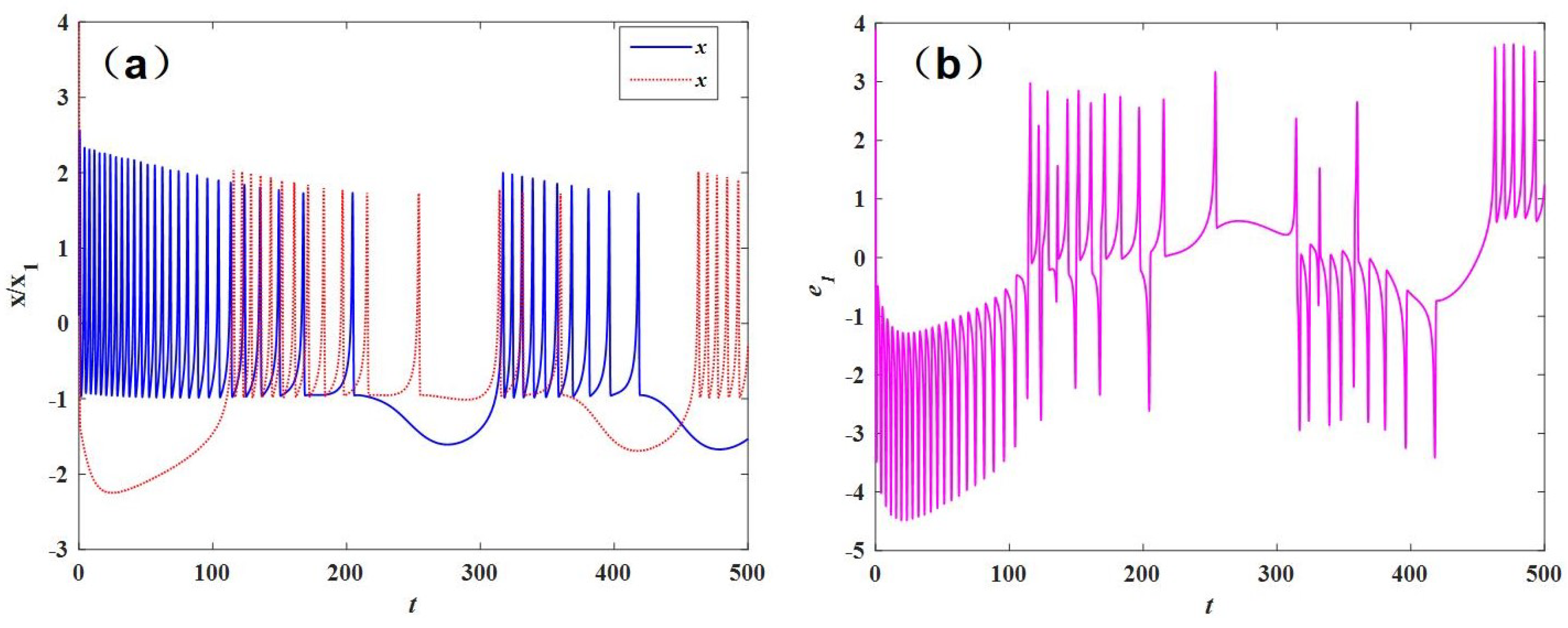
4.3. Controller Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tsumoto, K.; Kitajima, H.; Yoshinaga, T.; Aihara, K.; Kawakami, H. Bifurcations in Morris-Lecar neuron model. Neurocomputing 2006, 69, 293–316. [Google Scholar]
- Ma, K.J.; Tang, J. A review for dynamics in neuron and neuronal network. Nonlinear Dyn. 2017, 89, 1569–1578. [Google Scholar]
- Qishao, L. Neurodynamics and Mechanics. J. Dyn. Control. 2020, 18, 6–10. [Google Scholar]
- Lapicque, L. Recherches quantitatives sur 1’excitation electrique des nerfs traitescomme une polarization. J. Physiol. 1907, 9, 622. [Google Scholar]
- Hodgkin, A.L.; Huxley, A.F. A quantitative description of membrane current andits application to conduction and excitation in nerve. Physiology 1952, 117, 500–544. [Google Scholar]
- Nagumo, J.; Arimoto, S.; Yoshizawa, S. An Active Pulse Transmission LineSimulating Nerve Axon. Proc. IRE 1962, 50, 2061–2070. [Google Scholar]
- Fitzhugh, R. Impulses and physiological states in theoretical models of nervemembrane. Biophys. J. 1961, 1, 445–466. [Google Scholar] [CrossRef]
- Hindmarsh, J.L.; Rose, R.M. A model of the nerve impulse using two first-orderdifferential equations. Nature 1982, 296, 162–164. [Google Scholar]
- Bao, H.; Hu, A.; Liu, W.; Bao, B. Hidden bursting firings and bifurcation mechanisms in memristive neuron model with threshold electromagnetic induction. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 502–511. [Google Scholar]
- Lv, M.; Wang, C.; Ren, G.; Ma, J. Model of electrical activity in a neuron under magnetic flow effect. Nonlinear Dyn. 2016, 85, 1479–1490. [Google Scholar]
- Wu, F.; Wang, C.; Xu, Y.; Ma, J. Model of electrical activity in cardiac tissue under electromagnetic induction. Sci. Rep. 2016, 6, 68. [Google Scholar]
- Wang, Y.; Ma, J.; Xu, Y.; Wu, F.; Zhou, P. The Electrical Activity of Neurons Subject to Electromagnetic Induction and Gaussian White Noise. Int. J. Bifurc. Chaos 2017, 27, 1750030. [Google Scholar]
- Li, Z.J.; Xie, W.Q.; Zeng, J.F.; Zeng, Y.C. Firing activities in a fractional-order Hindmarsh-Rose neuron with multistable memristor as autapse. Chin. Phys. B 2022, 32, 010503. [Google Scholar]
- Shivam MalikMir, A.H. FPGA Realization of Fractional Order Hindmarsh Rose Neuron. Appl. Math. Model. 2019, 81, 372–385. [Google Scholar]
- Yu, Y.; Shi, M.; Kang, H.; Chen, M.; Bao, B. Hidden dynamics in a fractional-order memristive Hindmarsh— Rose model. Nonlinear Dyn. 2000, 100, 891–906. [Google Scholar]
- Fu, H.; Lei, T. Adomian Decomposition, Dynamic Analysis and Circuit Implementation of a 5D Fractional-Order Hyperchaotic System. Symmetry 2022, 14, 484. [Google Scholar] [CrossRef]
- Berkal, M.; Almatrafi, M.B. Bifurcation and Stability of Two-Dimensional Activator–Inhibitor Model with Fractional-Order Derivative. Fractal Fract. 2023, 7, 344. [Google Scholar] [CrossRef]
- Khan, A.Q.; Bukhari, S.A.H.; Almatrafi, M.B. Global dynamics, Neimark-Sacker bifurcation and hybrid control in a Leslie’s prey-predator model. Alex. Eng. J. 2022, 61, 11391–11404. [Google Scholar]
- Meng, F.; Zeng, X.; Wang, Z.; Wang, X. Adaptive Synchronization of Fractional-Order Coupled Neurons Under Electromagnetic Radiation. Int. J. Bifurc. Chaos 2020, 30, 2050044. [Google Scholar]
- Malik, S.A.; Mir, A.H. Synchronization of Fractional Order Neurons in Presence of Noise. IEEE/ACM Trans. Comput. Biol. Bioinform. 2020, 19, 1887–1896. [Google Scholar]
- Wang, S.; Wei, Z.; Wei, Z. Synchronization of coupled memristive Hindmarsh-Rose maps under different coupling conditions. Int. J. Electron. Commun. 2023, 161, 154561. [Google Scholar]
- Rehák, B.; Lynnyk, V. Synchronization of a Network Composed of Stochastic Hindmarsh–Rose Neurons. Mathematics 2021, 9, 2625. [Google Scholar] [CrossRef]
- Ding, K.; Han, Q.L. Master–slave synchronization criteria for chaotic Hindmarsh–Rose neurons using linear feedback control. Complexity 2016, 21, 319–327. [Google Scholar]
- Nguyen, L.H.; Hong, K.S. Adaptive synchronization of two coupled chaotic Hindmarsh–Rose neurons by controlling the membrane potential of a slave neuron. Appl. Math. Model. 2013, 37, 2460–2468. [Google Scholar]
- Ding, K.; Han, Q.L. Synchronization of two coupled Hindmarsh–Rose neurons. Kybernetika 2015, 51, 784–799. [Google Scholar]
- Hettiarachchi, I.T.; Lakshmanan, S.; Bhatti, A.; Lim, C.P.; Prakash, M.; Balasubramaniam, P.; Nahavandi, S. Chaotic synchronization of time-delay coupled Hindmarsh–Rose neurons via nonlinear control. Nonlinear Dyn. 2016, 86, 1249–1262. [Google Scholar]
- Equihua, G.G.V.; Ramirez, J.P. Synchronization of Hindmarsh–Rose neurons via Huygens-like coupling. IFAC-PapersOnLine 2018, 51, 186–191. [Google Scholar]
- Yu, H.; Peng, J. Chaotic synchronization and control in nonlinear-coupled Hindmarsh–Rose neural systems. Chaos Solitons Fractals 2006, 29, 342–348. [Google Scholar]
- Xu, Y.; Jia, Y.; Ma, J.; Alsaedi, A.; Ahmad, B. Synchronization between neurons coupled by memristor. Chaos Solitons Fractals 2017, 104, 435–442. [Google Scholar]
- Bandyopadhyay, A.; Kar, S. Impact of network structure on synchronization of Hindmarsh–Rose neurons coupled in structured network. Appl. Math. Comput. 2018, 333, 194–212. [Google Scholar]
- Li, C.; Su, K.; Tong, Y.; Li, H. Robust synchronization for a class of fractional-order chaotic and hyperchaotic systems. Opt.-Int. J. Light Electron Opt. 2013, 124, 3242–3245. [Google Scholar] [CrossRef]
- Cherruault, Y.; Adomian, G. Decomposition methods: A new proof of convergence. Math. Comput. Model. 1993, 18, 103–106. [Google Scholar] [CrossRef]
- Hindmarsh, J.L.; Rose, R.M. A model of neuronal bursting using three coupled first order differential equations. Proc. R. Soc. Lond. Biol. Sci. 1984, 221, 87–102. [Google Scholar]
- Bremen, H.F.V.; Udwadia, F.E.; Proskurowski, W. An efficient QR based method for the computation of Lyapunov exponents. Physica D 1997, 101, 1–16. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique. Fractal Fract. 2023, 7, 491. [Google Scholar] [CrossRef]
- Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Probing Families of Optical Soliton Solutions in Fractional Perturbed Radhakrishnan–Kundu–Lakshmanan Model with Improved Versions of Extended Direct Algebraic Method. Fractal Fract. 2023, 7, 512. [Google Scholar] [CrossRef]
- Zhang, K.; Alshehry, A.S.; Aljahdaly, N.H.; Shah, N.A.; Ali, M.R. Efficient computational approaches for fractional-order Degasperis-Procesi and Camassa-Holm equations. Results Phys. 2023, 50, 106549. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lei, T.; Fu, H.; Zang, H.; Huang, L.; Sun, W. Adomian Decomposition, Firing Change Process Analysis and Synchronous Control of Fractional-Order Hindmarsh–Rose Neurons in Electromagnetic Field. Processes 2023, 11, 2568. https://doi.org/10.3390/pr11092568
Lei T, Fu H, Zang H, Huang L, Sun W. Adomian Decomposition, Firing Change Process Analysis and Synchronous Control of Fractional-Order Hindmarsh–Rose Neurons in Electromagnetic Field. Processes. 2023; 11(9):2568. https://doi.org/10.3390/pr11092568
Chicago/Turabian StyleLei, Tengfei, Haiyan Fu, Hongyan Zang, Lili Huang, and Wenqiang Sun. 2023. "Adomian Decomposition, Firing Change Process Analysis and Synchronous Control of Fractional-Order Hindmarsh–Rose Neurons in Electromagnetic Field" Processes 11, no. 9: 2568. https://doi.org/10.3390/pr11092568
APA StyleLei, T., Fu, H., Zang, H., Huang, L., & Sun, W. (2023). Adomian Decomposition, Firing Change Process Analysis and Synchronous Control of Fractional-Order Hindmarsh–Rose Neurons in Electromagnetic Field. Processes, 11(9), 2568. https://doi.org/10.3390/pr11092568