
Radar-Based Particle Localization in Densely Packed Granular Assemblies

 , , ,
, , ,
Abstract
:1. Introduction
- It deals with tracking markers within bulk materials, where assumptions of free space or homogeneous backgrounds no longer apply due to refraction effects, scattering, and varying propagation velocities.
- Wave propagation occurs within particles that are no longer assumed to be small compared to the wavelength, leading to potential imaging artefacts and particle localization challenges. Other comparable works in [23,24,25] use frequencies in the range from GHz up to GHz but at the same time assume a homogeneous background medium such as sand [23,24] or mortar [25]; both media are significantly finer-grained than the medium used in this work.
- Industrial reactors are typically large, requiring a considerable number of antennas to ensure interference-free imaging. Our work operates in an undersampled three- dimensional region, presenting additional localization challenges. These aspects ensure the novelty of the present contribution.
2. Radar Technology
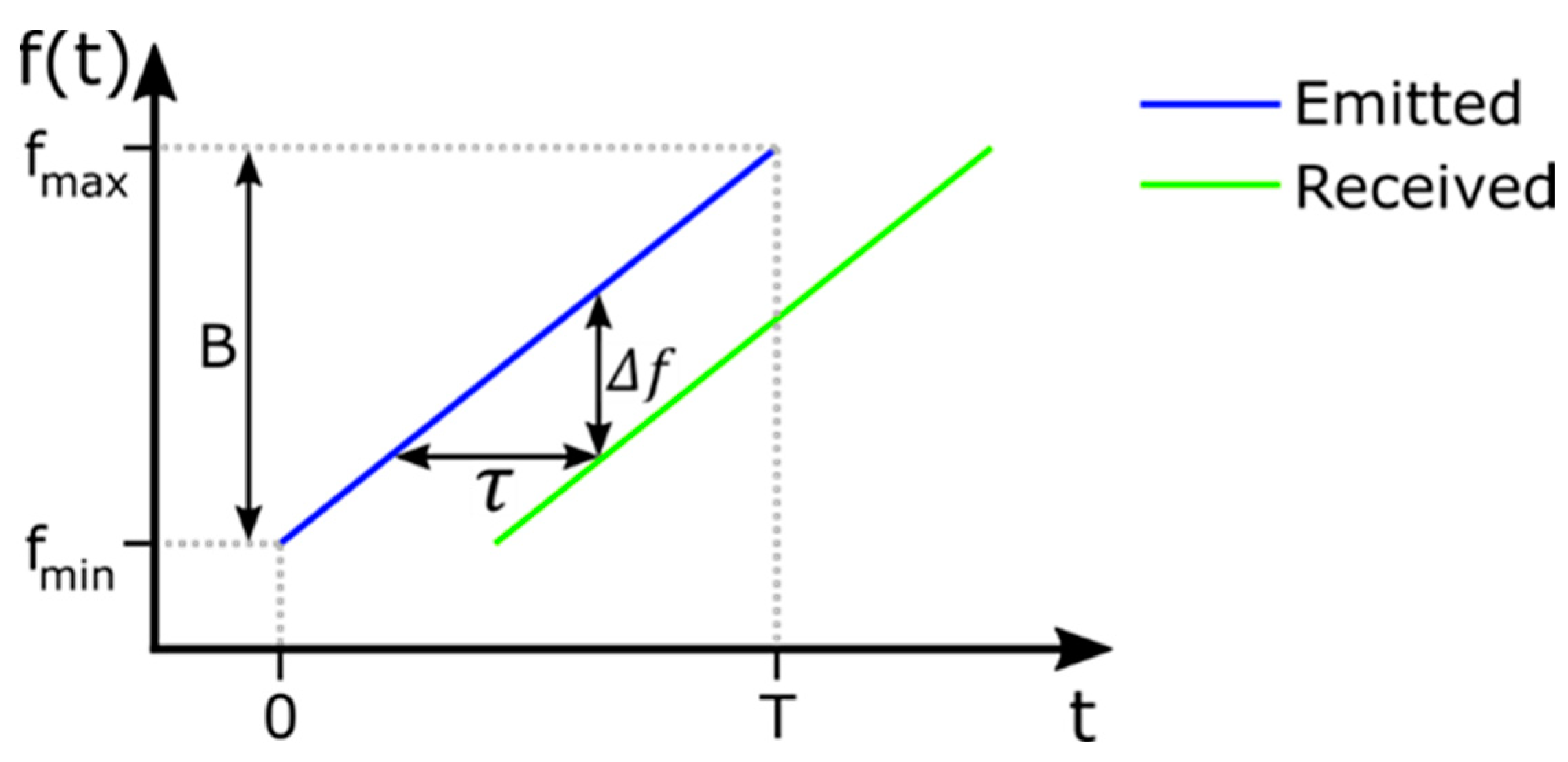
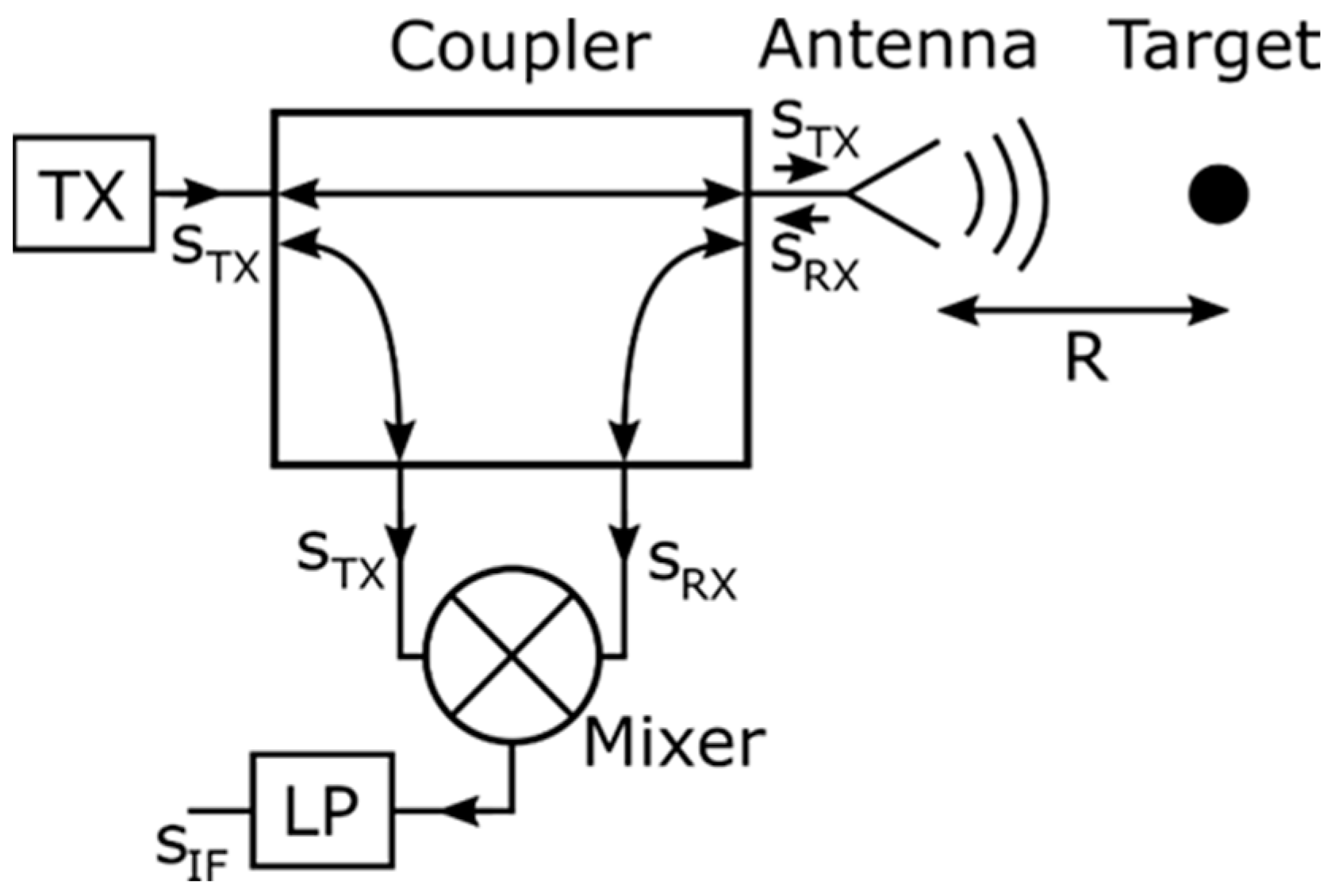
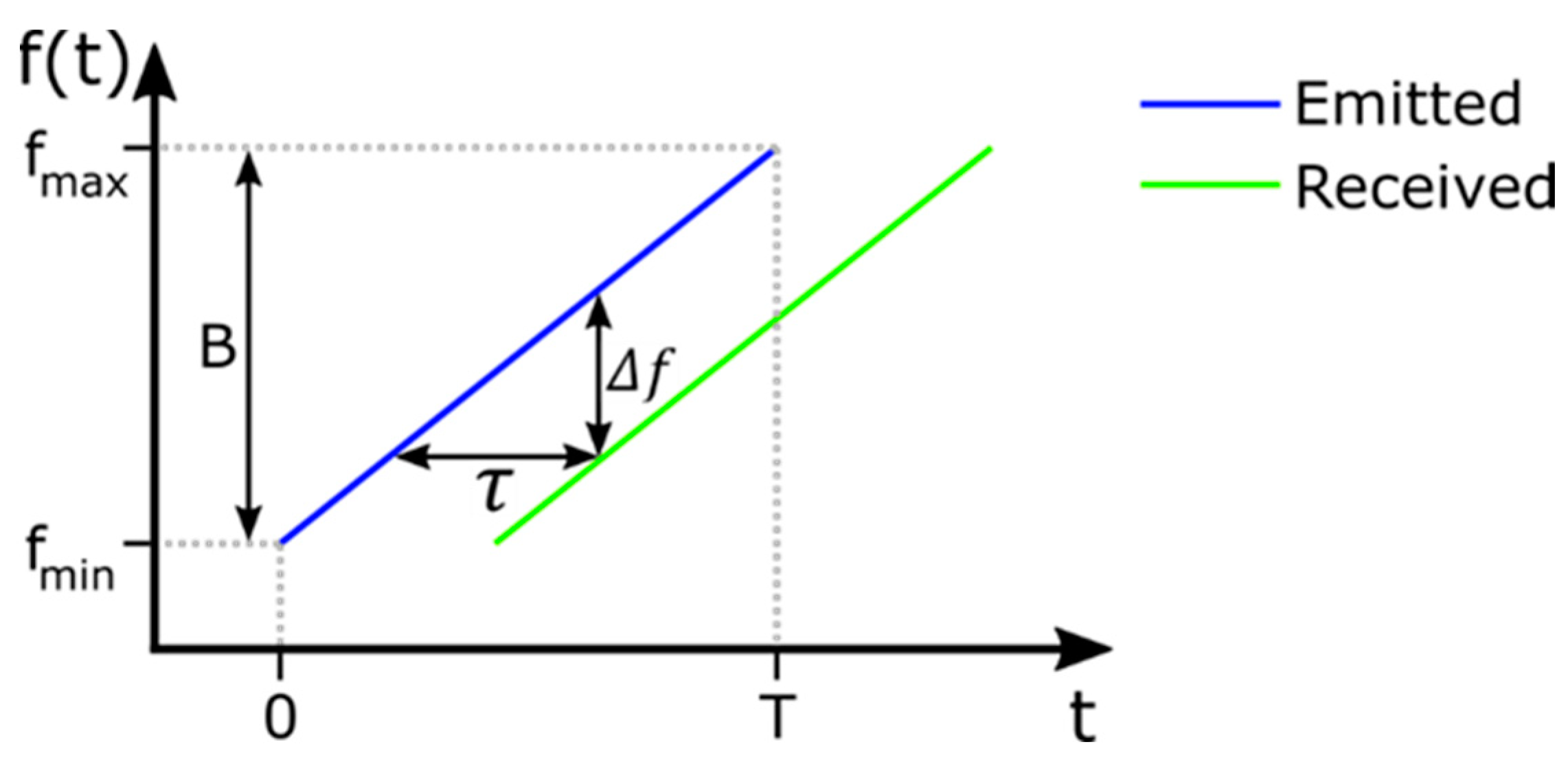
2.1. The FMCW Method
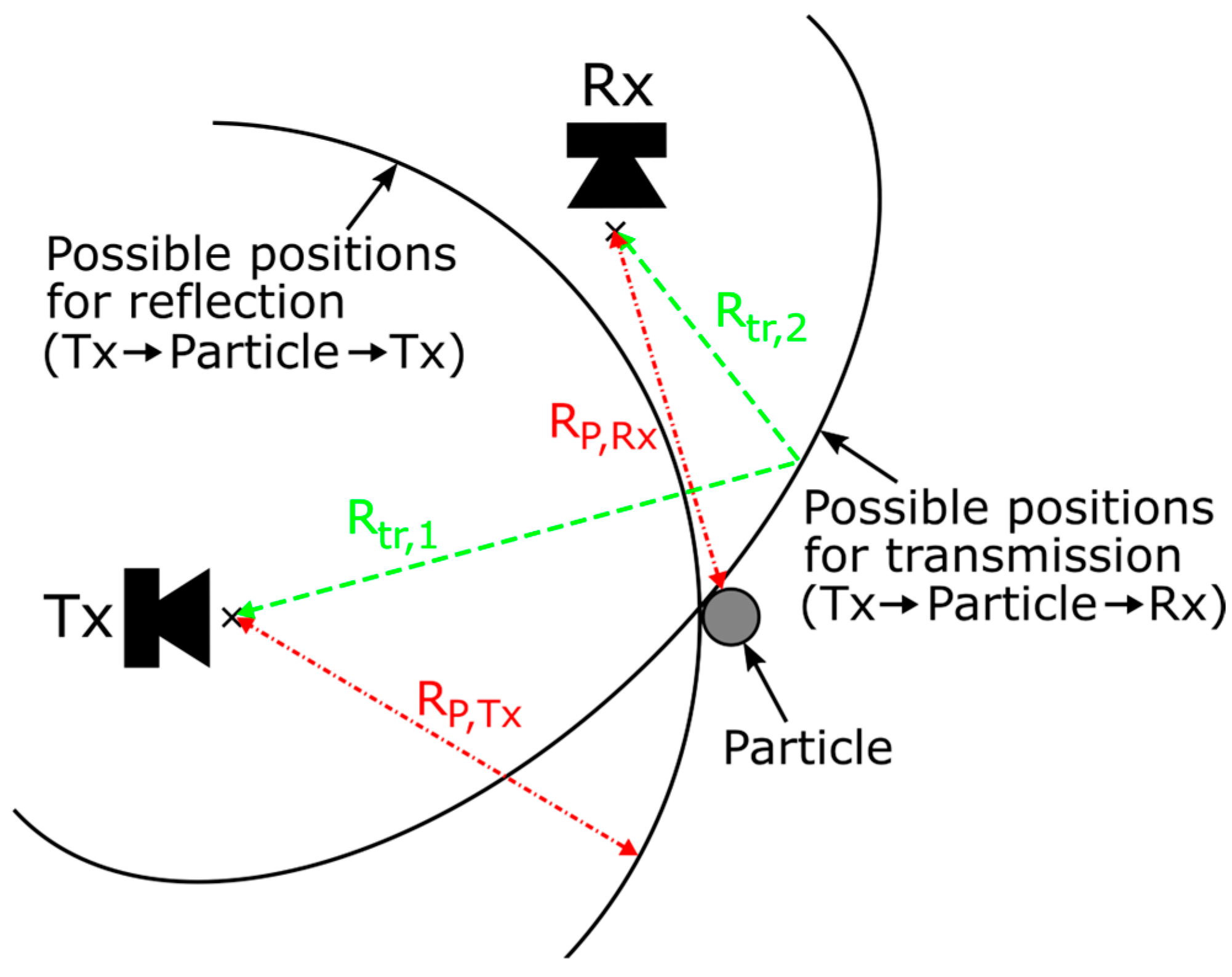
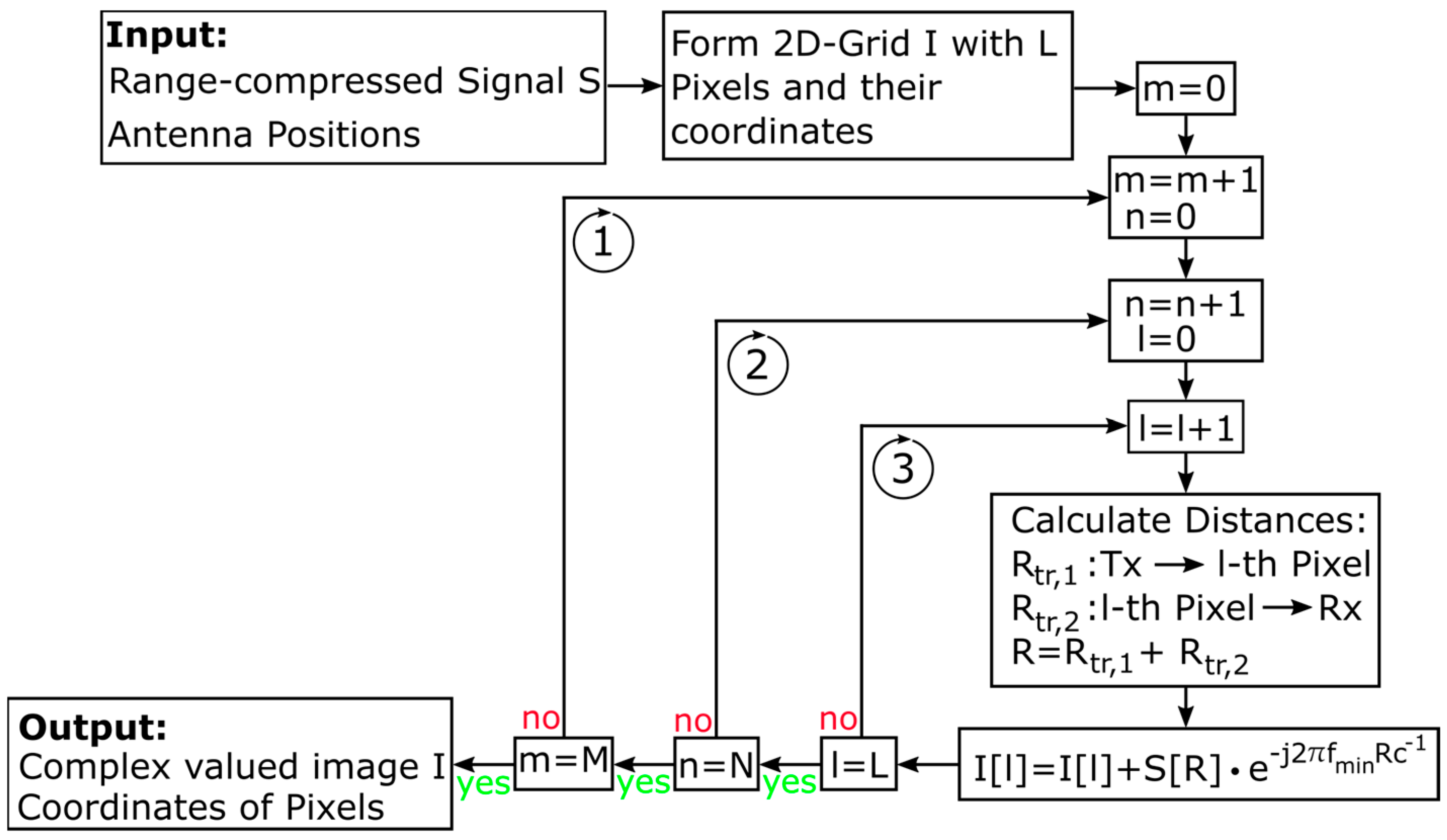
2.2. Radar Imaging
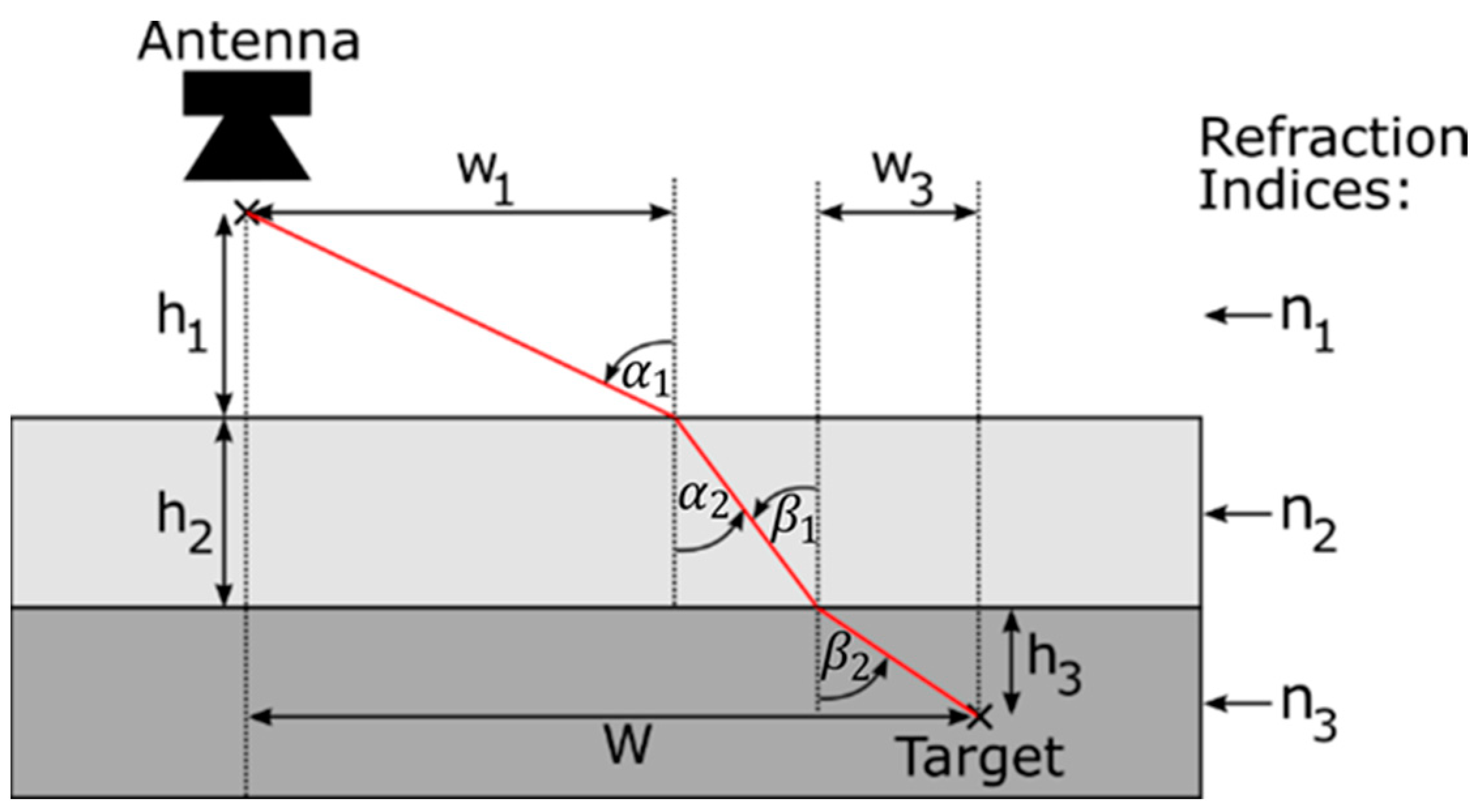
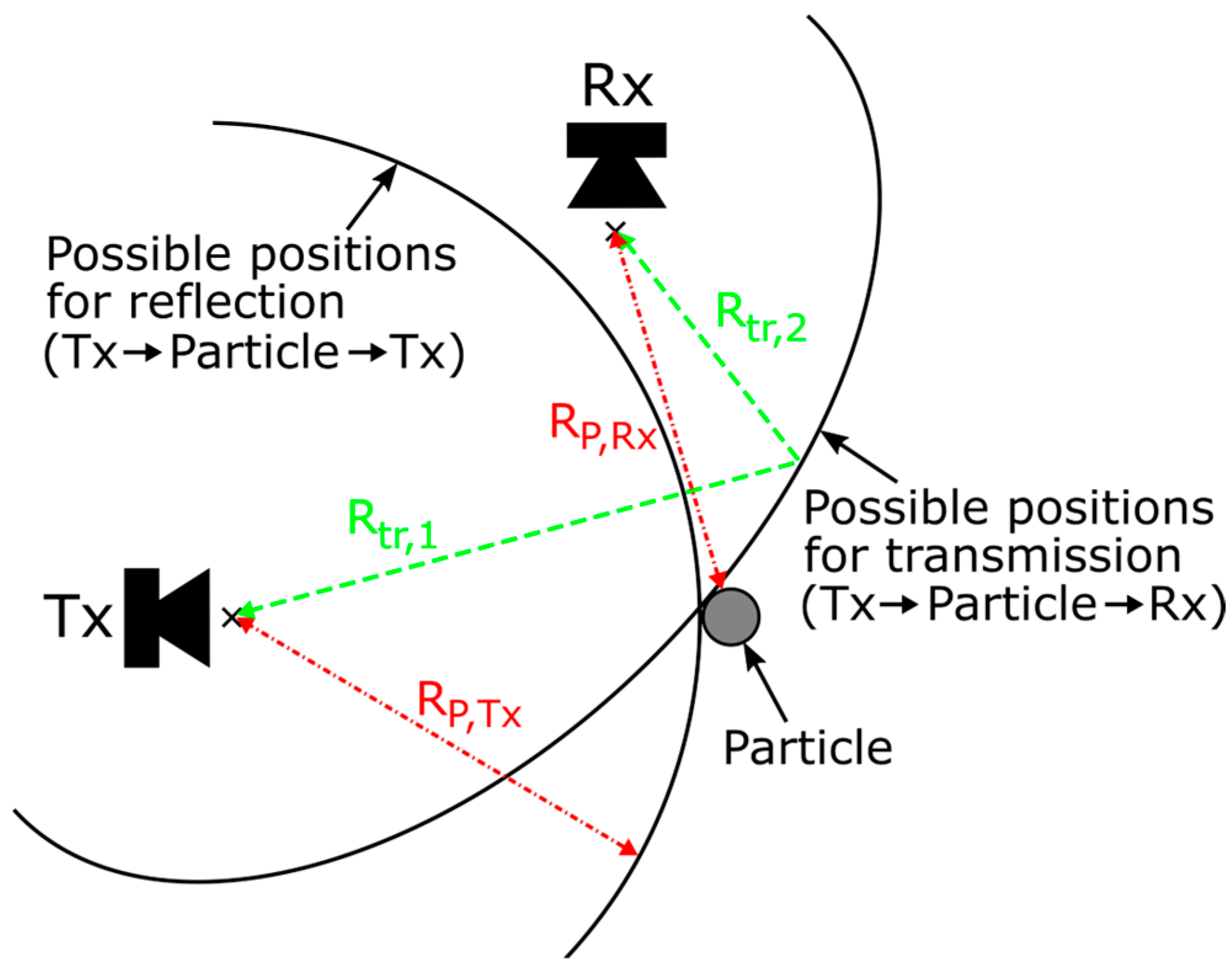
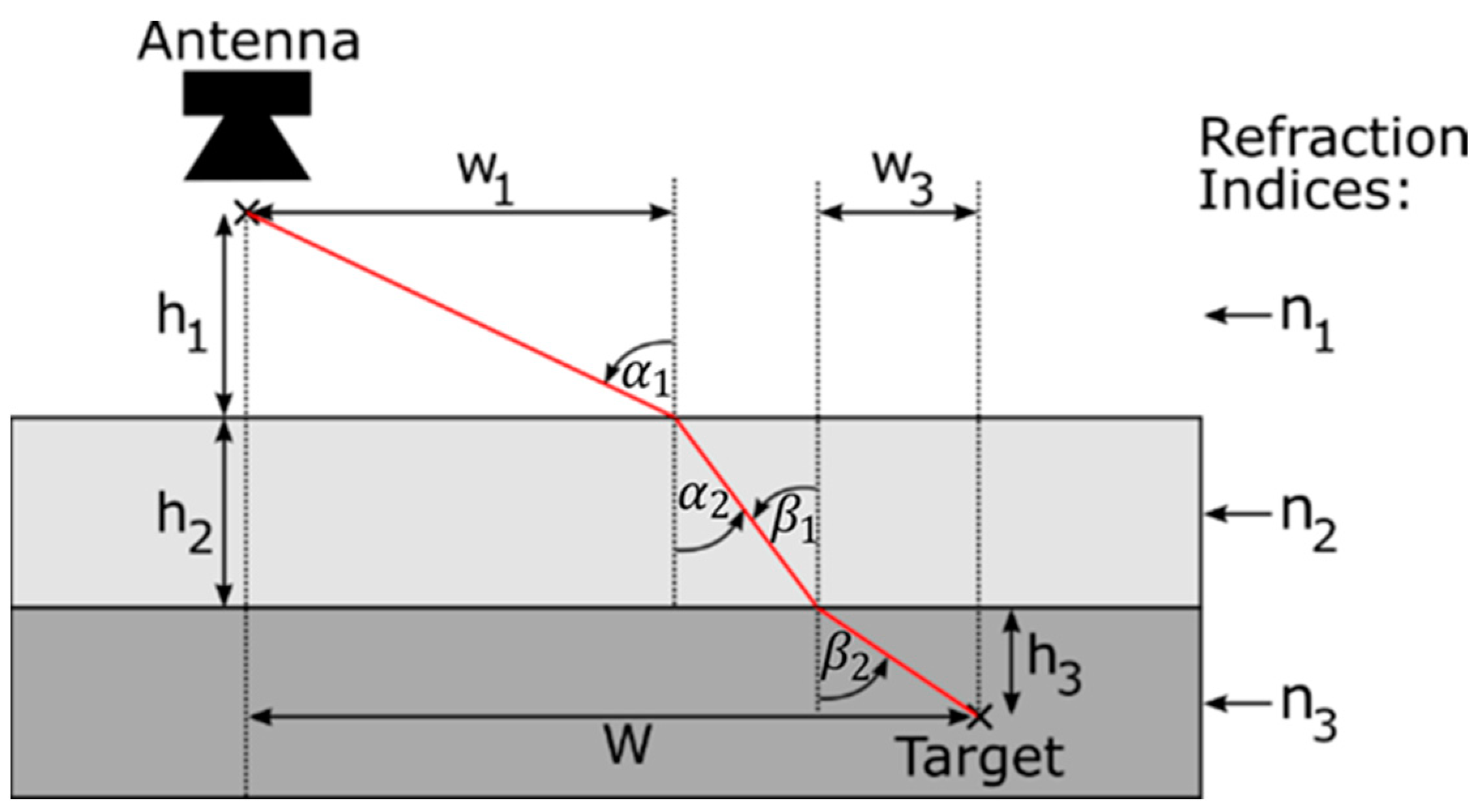
2.3. Refraction Compensation
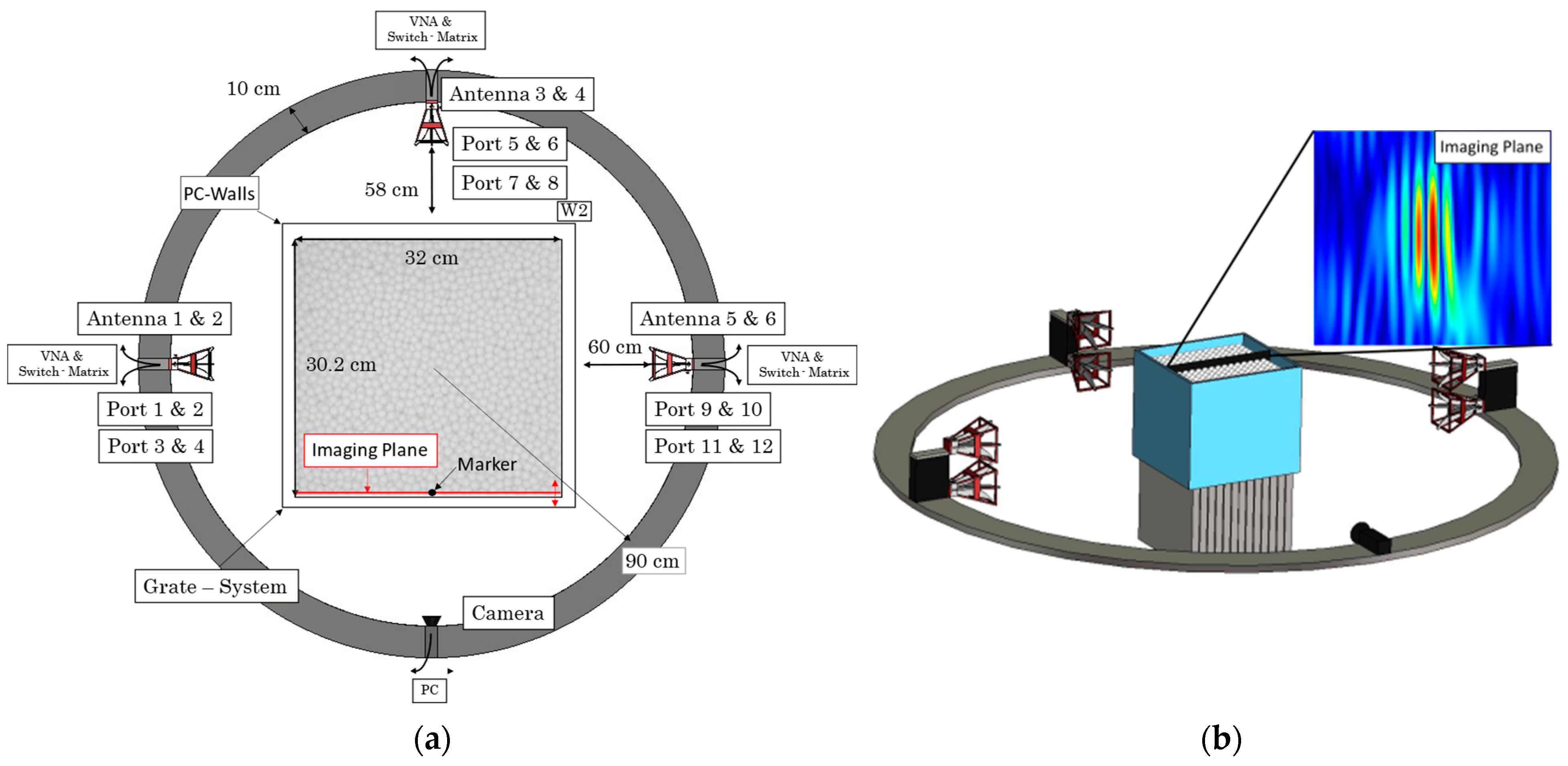
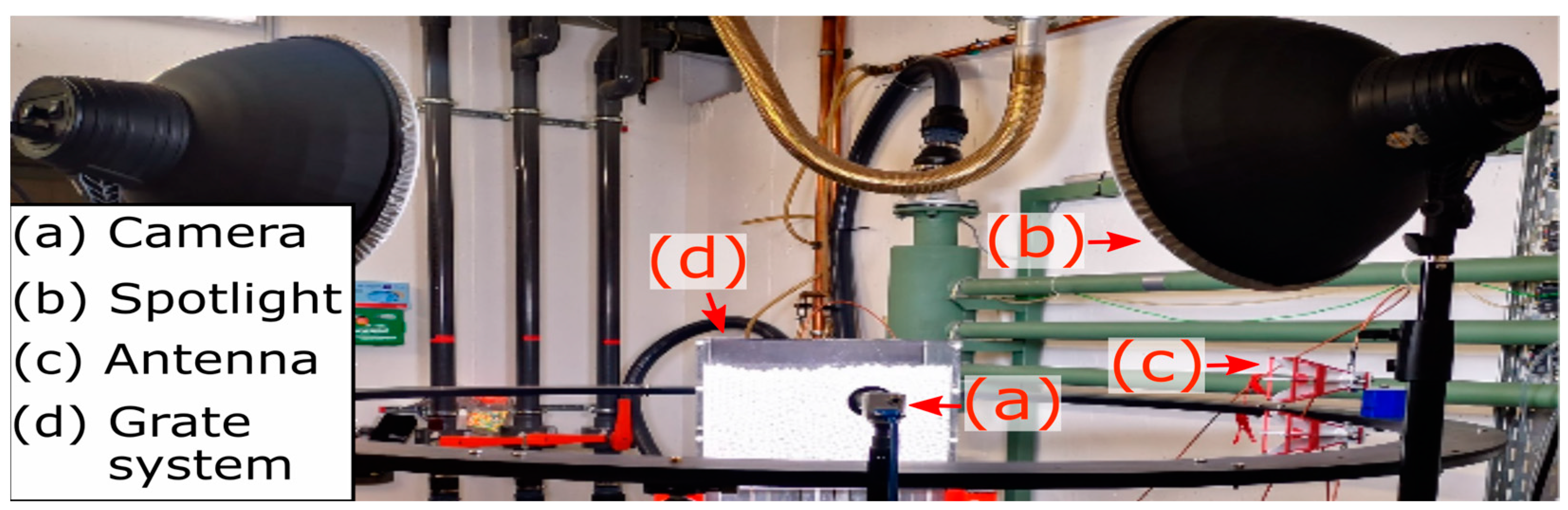
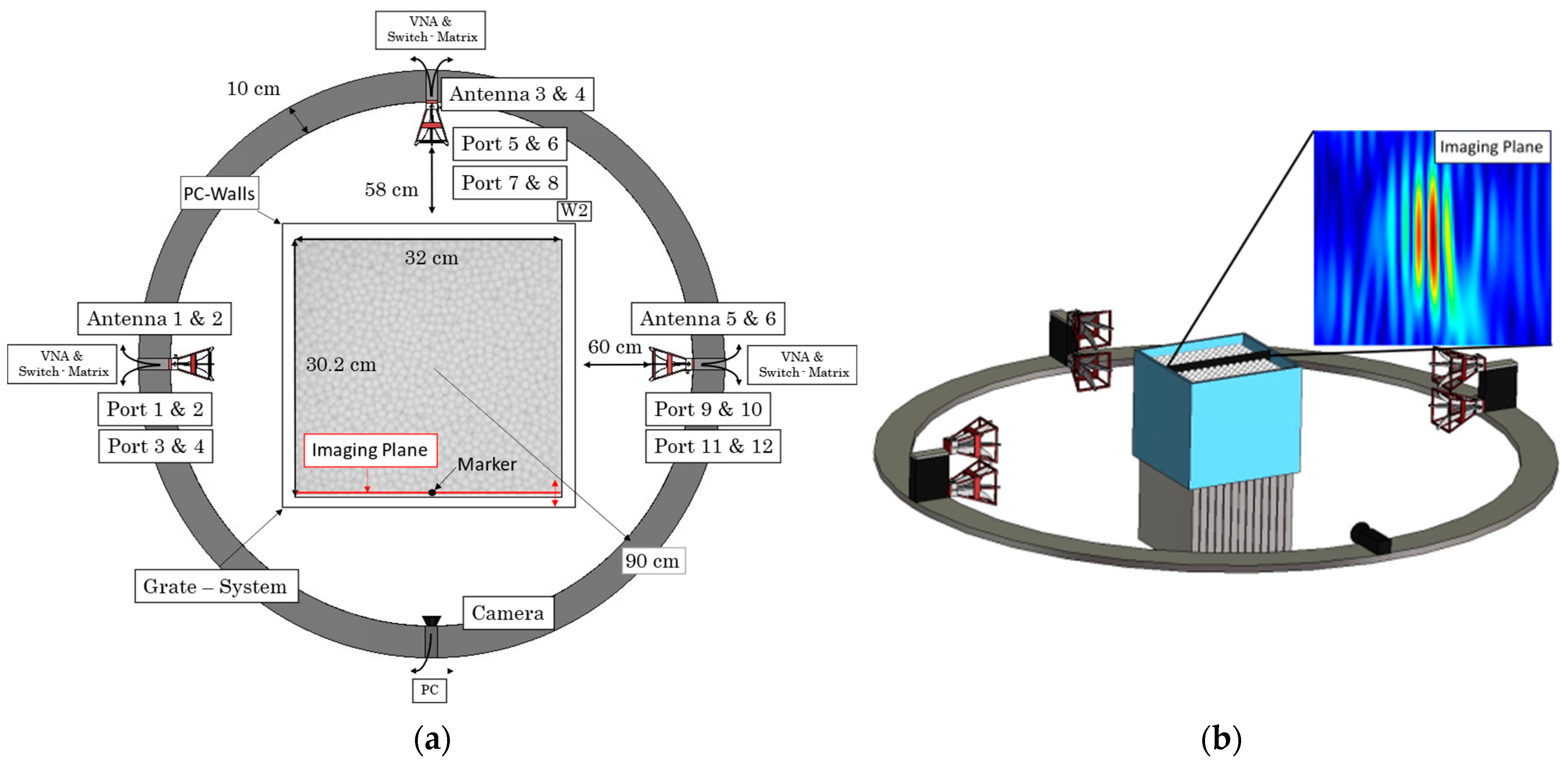
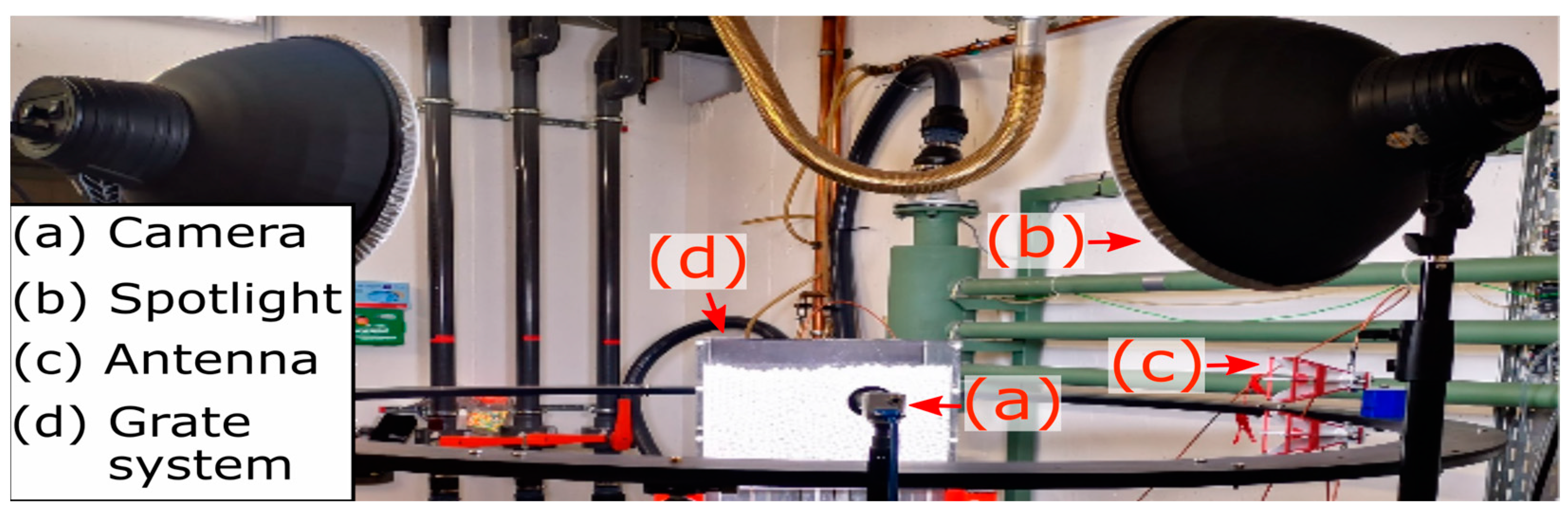
3. Set-Up
4. Measurement Procedure and Results
4.1. System Alignment
4.2. Optical Evaluation
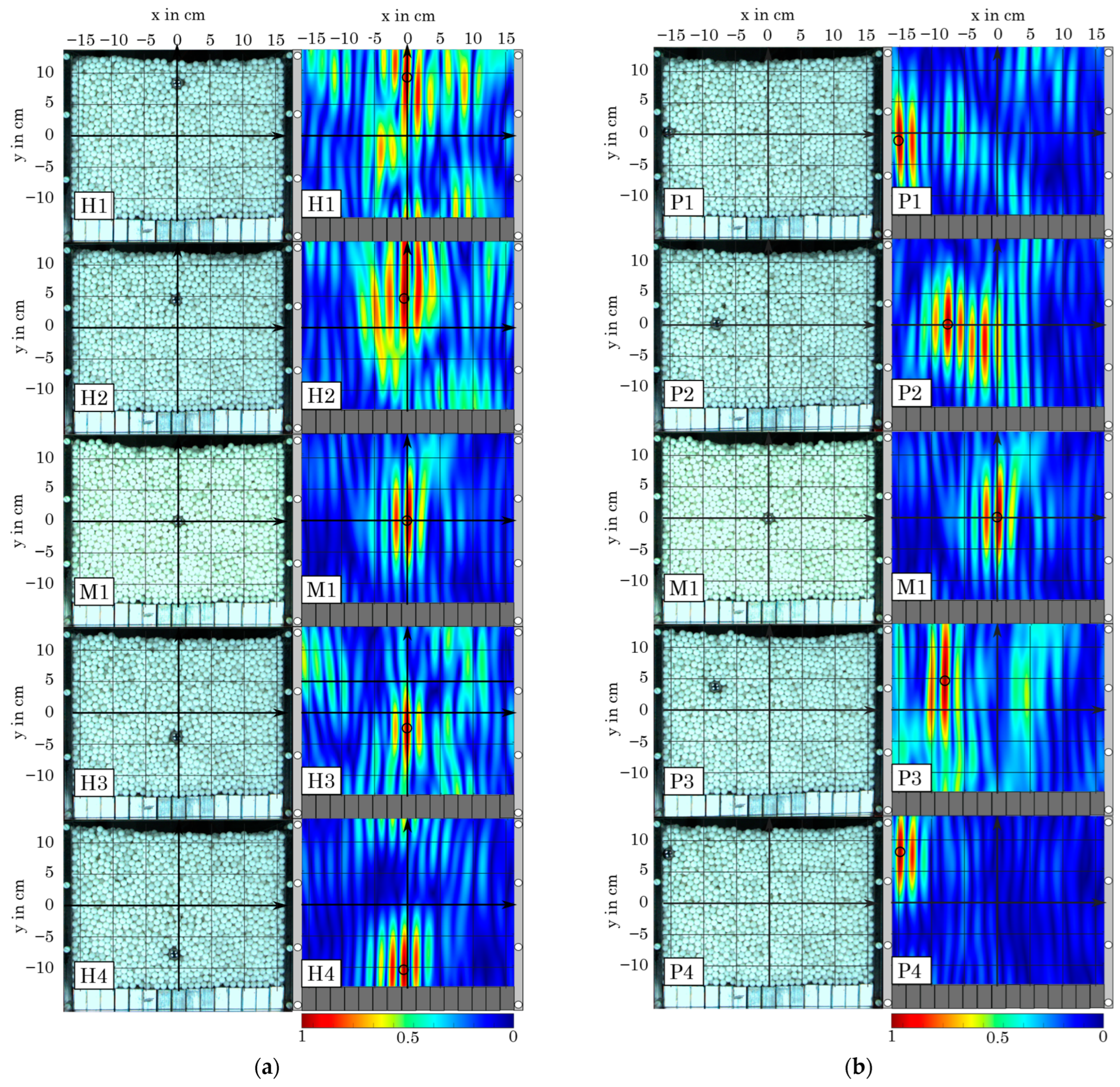
4.3. Measurement Results
4.4. Localization Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Latin Symbols | ||
| Symbol | Unit | Denotation |
| B | [Hz] | bandwidth |
| [m/s] | wave velocity | |
| [m/s] | speed of light | |
| [Hz] | frequency | |
| [m] | vertical distance | |
| complex image | ||
| Jacobian matrix | ||
| L | [m] | distance between two antennas |
| number of transmitters | ||
| number of receivers | ||
| n | refraction index | |
| R | [m] | object distance |
| receiver | ||
| transmission signal | ||
| received signal | ||
| intermediate frequency (IF-) signal | ||
| T | [s] | end of time interval |
| transmitter | ||
| [m] | horizontal distance between antenna and target | |
| [m] | variable | |
| [m] | particle position x-direction | |
| [m] | particle position y-direction | |
| Greek Symbols | ||
| Symbol | Unit | Denotation |
| [rad] | angle of incidence | |
| [m] | resolution | |
| [m] | circular aperture | |
| [Hz] | angular frequency | |
| [m] | linear aperture | |
| relative permittivity | ||
| [m] | wavelength | |
| permeability | ||
| standard deviation | ||
| [s] | the round-trip time | |
| [rad] | phase shift | |
| Abbreviation | Denotation | |
| MIMO | multiple-input multiple-output | |
| MRI | magnetic resonance imaging | |
| MPT | magnetic particle tracking | |
| PEPT | positron emission particle tracking | |
| FMCW | frequency modulated continuous wave | |
| RPT | radioactive particle tracking | |
| POM | polyoxymethylene | |
| VNA | vector network analyzer | |
| LP | low-pass filtered | |
| IF | intermediate frequency | |
| PC | polycarbonate | |
Appendix A
Appendix B
Appendix C

Appendix D
Appendix E
References
- Di Renzo, A.; Rito, G.; Di Maio, F.P. Systematic Experimental Investigation of Segregation Direction and Layer Inversion in Binary Liquid-Fluidized Bed. Processes 2020, 8, 177. [Google Scholar] [CrossRef]
- Piringer, H. Lime Shaft Kilns. Energy Procedia 2017, 120, 75–95. [Google Scholar] [CrossRef]
- Yin, C.; Rosendahl, L.A.; Kær, S.K. Grate-firing of biomass for heat and power production. Prog. Energy Combust. Sci. 2008, 34, 725–754. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Pepe, C.; Astolfi, G. Advanced Process Control for Clinker Rotary Kiln and Grate Cooler. Sensors 2023, 23, 2805. [Google Scholar] [CrossRef] [PubMed]
- Amon, A.; Born, P.; Daniels, K.E.; Dijksman, J.A.; Huang, K.; Parker, D.; Schröter, M.; Stannarius, R.; Wierschem, A. Preface: Focus on imaging methods in granular physics. Rev. Sci. Instrum. 2017, 88, 051701. [Google Scholar] [CrossRef] [PubMed]
- Pore, M.; Ong, G.; Boyce, C.; Materazzi, M.; Gargiuli, J.; Leadbeater, T.; Sederman, A.; Dennis, J.; Holland, D.; Ingram, A.; et al. A comparison of magnetic resonance, X-ray and positron emission particle tracking measurements of a single jet of gas entering a bed of particles. Chem. Eng. Sci. 2015, 122, 210–218. [Google Scholar] [CrossRef]
- Bolomey, J.-C.; Jofre, L. Three decades of active microwave imaging achievements, difficulties and future challenges. In Proceedings of the 2010 IEEE International Conference on Wireless Information Technology and Systems (ICWITS), Honolulu, HI, USA, 28 August 2010; pp. 1–4. [Google Scholar]
- Och, A.; Holzl, P.A.; Schuster, S.; Scheiblhofer, S.; Zankl, D.; Pathuri-Bhuvana, V.; Weigel, R. High-Resolution Millimeter-Wave Tomography System for Nondestructive Testing of Low-Permittivity Materials. IEEE Trans. Microw. Theory Tech. 2021, 69, 1105–1113. [Google Scholar] [CrossRef]
- Brooks, S.L. COMPUTED TOMOGRAPHY. Dent. Clin. N. Am. 1993, 37, 575–590. [Google Scholar] [CrossRef]
- Kawaguchi, T. MRI measurement of granular flows and fluid-particle flows. Adv. Powder Technol. 2010, 21, 235–241. [Google Scholar] [CrossRef]
- van de Velden, M.; Baeyens, J.; Seville, J.P.K.; Fan, X. The solids flow in the riser of a Circulating Fluidised Bed (CFB) viewed by Positron Emission Particle Tracking (PEPT). Powder Technol. 2008, 183, 290–296. [Google Scholar] [CrossRef]
- Rasouli, M.; Bertrand, F.; Chaouki, J. A multiple radioactive particle tracking technique to investigate particulate flows. AIChE J. 2015, 61, 384–394. [Google Scholar] [CrossRef]
- Buist, K.A.; van Erdewijk, T.W.; Deen, N.G.; Kuipers, J.A.M. Determination and comparison of rotational velocity in a pseudo 2-D fluidized bed using magnetic particle tracking and discrete particle modeling. AIChE J. 2015, 61, 3198–3207. [Google Scholar] [CrossRef]
- Kim, S.; Kim, J.; Chung, C.; Ka, M.-H. Derivation and Validation of Three-Dimensional Microwave Imaging Using a W-Band MIMO Radar. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Jia, Y.; Cui, C.; Yan, C.; Zhong, X.; Guo, Y.; Chen, G. MIMO Through-Wall-Radar Spotlight Imaging Based on Arithmetic Image Fusion. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION 2018), Cambridge, UK, 10–13 July 2018; pp. 1498–1502. [Google Scholar]
- Wu, Z.; Wang, H. Microwave Tomography for Industrial Process Imaging: Example Applications and Experimental Results. IEEE Antennas Propag. Mag. 2017, 59, 61–71. [Google Scholar] [CrossRef]
- Kalender, W.A. X-ray computed tomography. Phys. Med. Biol. 2006, 51, R29–R43. [Google Scholar] [CrossRef]
- Panzner, B.; Jöstingmeier, A.; Omar, A. Computer tomography as imaging technique for ground penetrating radar A case study. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 301–304. [Google Scholar]
- Gholamzadehmir, M.; Del Pero, C.; Buffa, S.; Fedrizzi, R.; Aste, N. Adaptive-predictive control strategy for HVAC systems in smart buildings—A review. Sustain. Cities Soc. 2020, 63, 102480. [Google Scholar] [CrossRef]
- Thormann, K.; Baum, M.; Honer, J. Extended Target Tracking Using Gaussian Processes with High-Resolution Automotive Radar. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION 2018), Cambridge, UK, 10–13 July 2018; pp. 1764–1770. [Google Scholar]
- Kumuda, D.K.; Vandana, G.S.; Pardhasaradhi, B.; Raghavendra, B.S.; Srihari, P.; Cenkeramaddi, L.R. Multitarget Detection and Tracking by Mitigating Spot Jammer Attack in 77-GHz mm-Wave Radars: An Experimental Evaluation. IEEE Sens. J. 2023, 23, 5345–5361. [Google Scholar] [CrossRef]
- Pearce, A.; Zhang, J.A.; Xu, R.; Wu, K. Multi-Object Tracking with mmWave Radar: A Review. Electronics 2023, 12, 308. [Google Scholar] [CrossRef]
- Laviada, J.; Wu, B.; Ghasr, M.T.; Zoughi, R. Nondestructive Evaluation of Microwave-Penetrable Pipes by Synthetic Aperture Imaging Enhanced by Full-Wave Field Propagation Model. IEEE Trans. Instrum. Meas. 2019, 68, 1112–1119. [Google Scholar] [CrossRef]
- Wu, B.; Gao, Y.; Laviada, J.; Ghasr, M.T.; Zoughi, R. Time-Reversal SAR Imaging for Nondestructive Testing of Circular and Cylindrical Multilayered Dielectric Structures. IEEE Trans. Instrum. Meas. 2020, 69, 2057–2066. [Google Scholar] [CrossRef]
- Fallahpour, M.; Case, J.T.; Ghasr, M.T.; Zoughi, R. Piecewise and Wiener Filter-Based SAR Techniques for Monostatic Microwave Imaging of Layered Structures. IEEE Trans. Antennas Propag. 2014, 62, 282–294. [Google Scholar] [CrossRef]
- Schorlemer, J.; Schulz, C.; Pohl, N.; Rolfes, I.; Barowski, J. Compensation of Sensor Movements in Short-Range FMCW Synthetic Aperture Radar Algorithms. IEEE Trans. Microw. Theory Tech. 2021, 69, 5145–5159. [Google Scholar] [CrossRef]
- Schorlemer, J.; Jebramcik, J.; Rolfes, I.; Barowski, J. Comparison of Short-Range SAR Imaging Algorithms for the Detection of Landmines using Numerical Simulations. In Proceedings of the 2021 18th European Radar Conference (EuRAD), London, UK, 5–7 April 2022; IEEE: New York, NY, USA, 2022; pp. 393–396. [Google Scholar]
- Hilse, N.; Kriegeskorte, M.; Illana, E.; Wirtz, S.; Scherer, V. Mixing and segregation of spheres of three different sizes on a batch stoker grate: Experiments and discrete element simulation. Powder Technol. 2022, 400, 117258. [Google Scholar] [CrossRef]
- Rickelt, S. Discrete element simulation and experimental validation of conductive and convective heat transfer in moving granular material. In Berichte aus der Energietechnik; Shaker Verlag: Aachen, Germany, 2011. [Google Scholar]
- Riddle, B.; Baker-Jarvis, J.; Krupka, J. Complex permittivity measurements of common plastics over variable temperatures. IEEE Trans. Microw. Theory Tech. 2003, 51, 727–733. [Google Scholar] [CrossRef]
- Givot, B.L.; Gregory, A.P.; Salski, B.; Zentis, F.; Pettit, N.; Karpisz, T.; Kopyt, P. A comparison of measurements of the permittivity and loss angle of polymers in the frequency range 10 GHz to 90 GHz. In Proceedings of the 2021 15th European Conference on Antennas and Propagation (EuCAP), Düsseldorf, Germany, 22–26 March 2021; pp. 1–5. [Google Scholar]
- Hattenhorst, B.; van Delden, M.; Schenkel, F.; Schorlemer, J.; Barowski, J.; Rolfes, I.; Musch, T. Tracer Particles with Encapsulated Resonators for Electromagnetic Localization and Tracking in Moving Bulk Materials; ICEAA: Venice, Italy, 2023. [Google Scholar]
- Batra, A.; Barowski, J.; Damyanov, D.; Wiemeler, M.; Rolfes, I.; Schultze, T.; Balzer, J.C.; Gohringer, D.; Kaiser, T. Short-Range SAR Imaging From GHz to THz Waves. IEEE J. Microw. 2021, 1, 574–585. [Google Scholar] [CrossRef]
- Koivukangas, T.; Katisko, J.; Koivukangas, J. Detection of the spatial accuracy of a magnetic resonance and surgical computed tomography scanner in the region of surgical interest. J. Med. Imaging 2014, 1, 015502. [Google Scholar] [CrossRef] [PubMed]
- Windows-Yule, C.R.K.; Seville, J.P.K.; Ingram, A.; Parker, D.J. Positron Emission Particle Tracking of Granular Flows. Annu. Rev. Chem. Biomol. Eng. 2020, 11, 367–396. [Google Scholar] [CrossRef]
- Dubé, O.; Dubé, D.; Chaouki, J.; Bertrand, F. Optimization of detector positioning in the radioactive particle tracking technique. Appl. Radiat. Isot. 2014, 89, 109–124. [Google Scholar] [CrossRef]
- Köhler, A.; Rasch, A.; Pallarès, D.; Johnsson, F. Experimental characterization of axial fuel mixing in fluidized beds by magnetic particle tracking. Powder Technol. 2017, 316, 492–499. [Google Scholar] [CrossRef]
- Sihvola, A.H.; Kong, J.A. Effective permittivity of dielectric mixtures. IEEE Trans. Geosci. Remote Sens. 1988, 26, 420–429. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
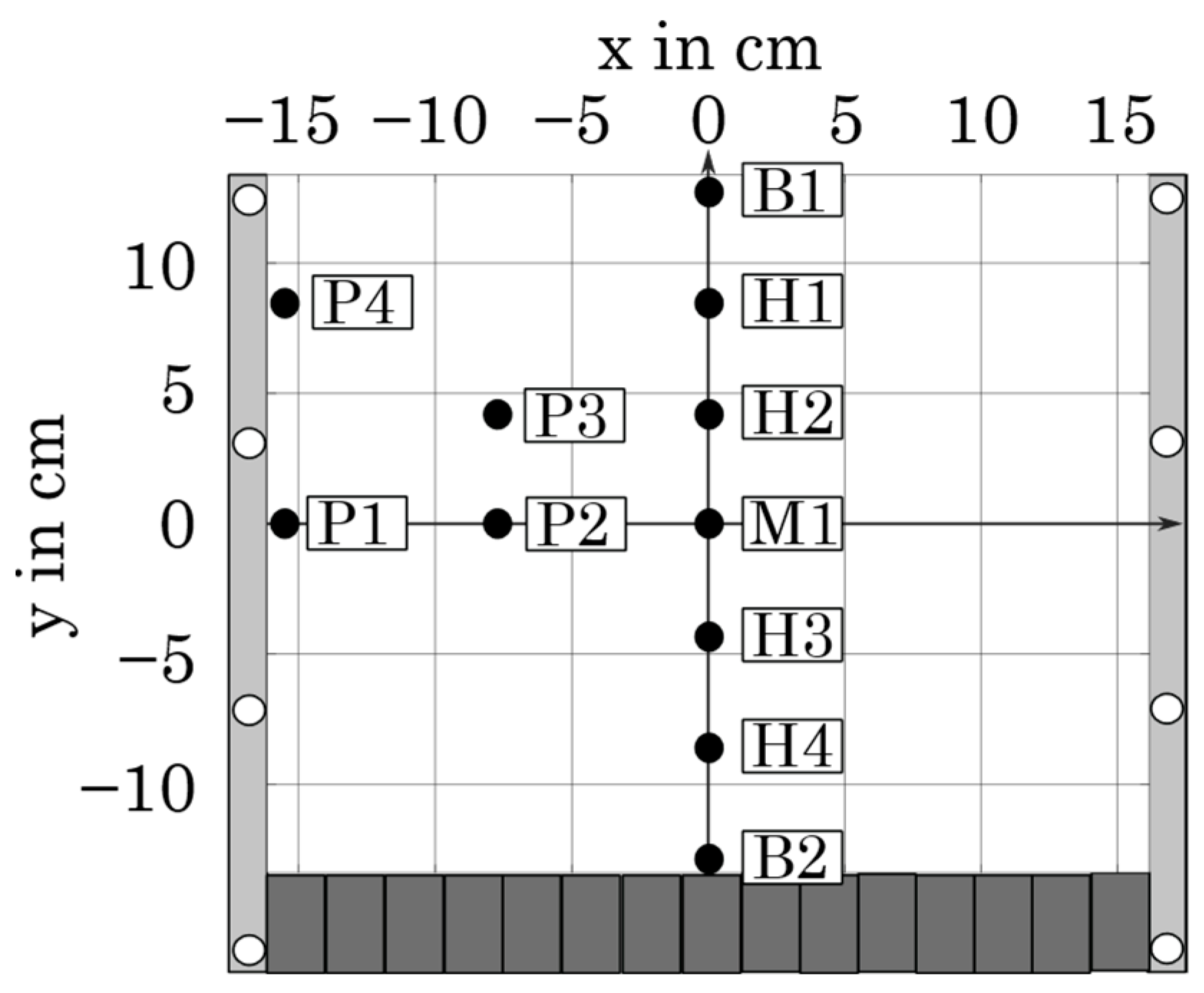
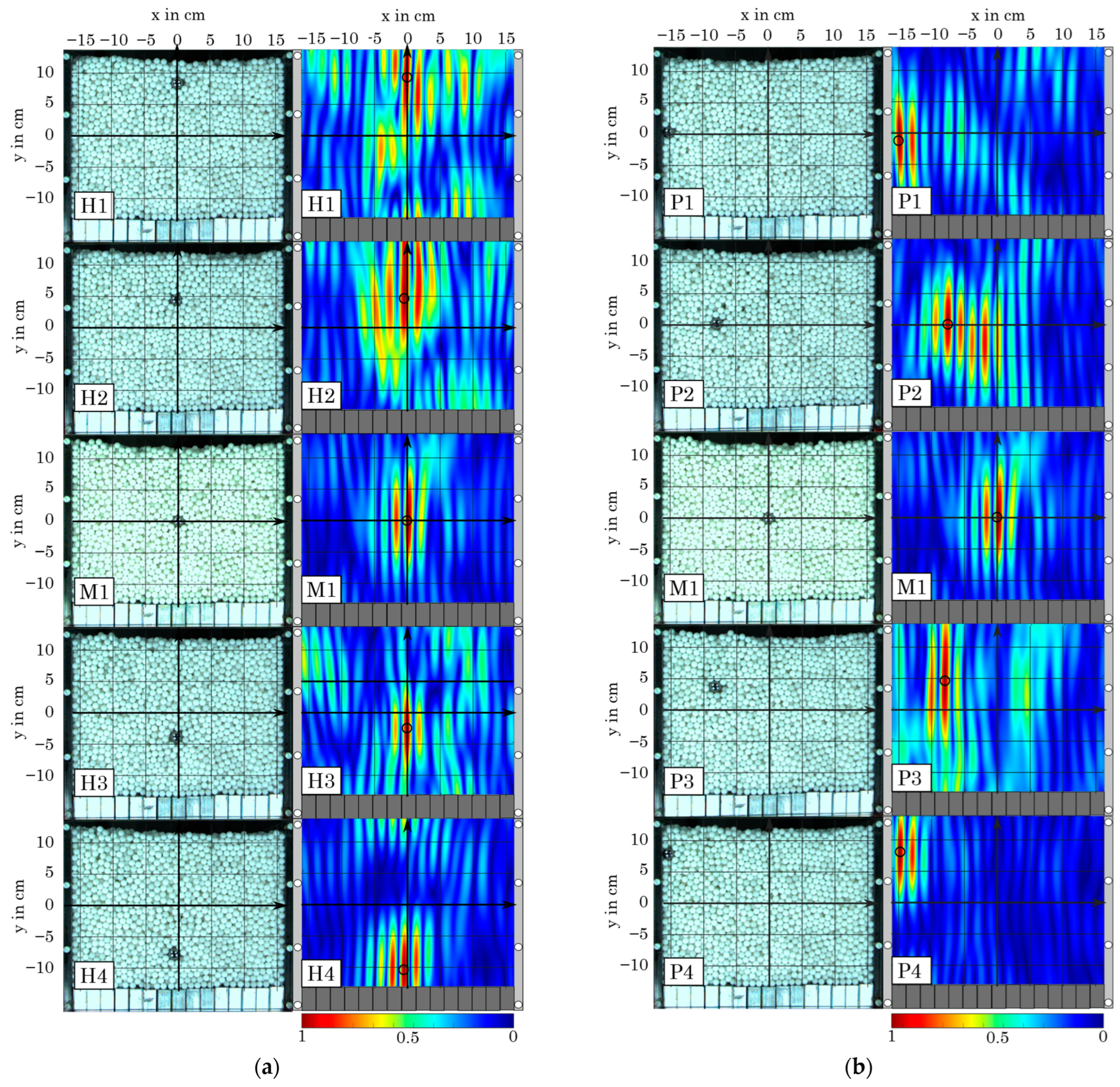
| Position | Particle Displacement (Optical Evaluation) | Particle Displacement (Radar-Based Evaluation) | Difference in Particle Displacements | |||
|---|---|---|---|---|---|---|
| x in cm | y in cm | x in cm | y in cm | in cm | in cm | |
| M1 | - | - | - | - | - | - |
| H1 | −0.09 | 8.16 | −0.21 | 9.65 | −0.13 | +1.49 |
| H2 | −0.22 | 4.49 | −0.53 | 4.6 | −0.31 | +0.11 |
| H3 | −0.18 | 3.51 | −0.21 | −3.23 | −0.03 | −0.28 |
| H4 | −0.49 | −7.3 | −0.63 | −10.72 | −0.14 | −2.98 |
| P1 | −15 | 0.25 | −14.87 | −1.52 | +0.13 | −1.33 |
| P2 | −7.7 | 0.38 | −7.59 | 0.35 | +0.11 | −0.03 |
| P3 | −7.89 | 3.73 | −8.13 | 4.34 | −0.24 | +0.61 |
| P4 | −15 | 7.59 | −14.87 | 7.53 | +0.13 | −0.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schorlemer, J.; Schenkel, F.; Hilse, N.; Schulz, C.; Barowski, J.; Scherer, V.; Rolfes, I. Radar-Based Particle Localization in Densely Packed Granular Assemblies. Processes 2023, 11, 3183. https://doi.org/10.3390/pr11113183
Schorlemer J, Schenkel F, Hilse N, Schulz C, Barowski J, Scherer V, Rolfes I. Radar-Based Particle Localization in Densely Packed Granular Assemblies. Processes. 2023; 11(11):3183. https://doi.org/10.3390/pr11113183
Chicago/Turabian StyleSchorlemer, Jonas, Francesca Schenkel, Nikoline Hilse, Christian Schulz, Jan Barowski, Viktor Scherer, and Ilona Rolfes. 2023. "Radar-Based Particle Localization in Densely Packed Granular Assemblies" Processes 11, no. 11: 3183. https://doi.org/10.3390/pr11113183
APA StyleSchorlemer, J., Schenkel, F., Hilse, N., Schulz, C., Barowski, J., Scherer, V., & Rolfes, I. (2023). Radar-Based Particle Localization in Densely Packed Granular Assemblies. Processes, 11(11), 3183. https://doi.org/10.3390/pr11113183