3.2. Prediction Analytical Equations
To provide a practical way to predict the output power of WT with different gearbox efficiency levels, in addition to predicting the gearbox efficiency itself, two analytical equations, Equations (9) and (10), were extracted from the ANN models based on their weights and biases.
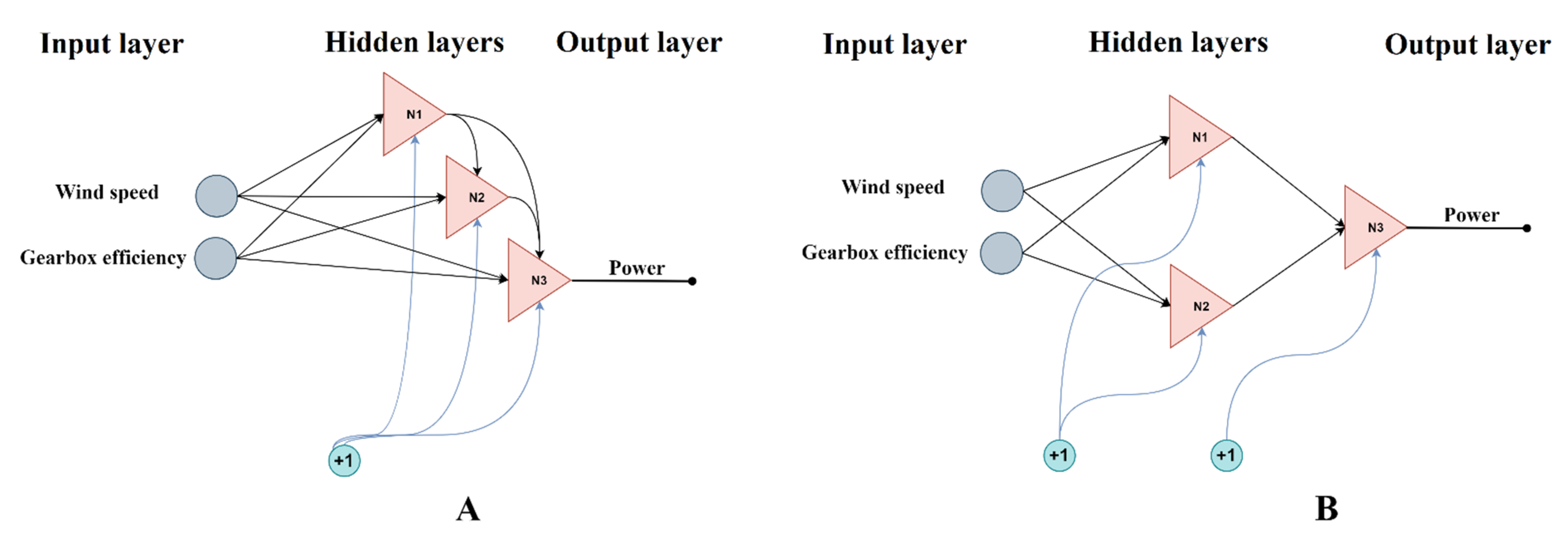
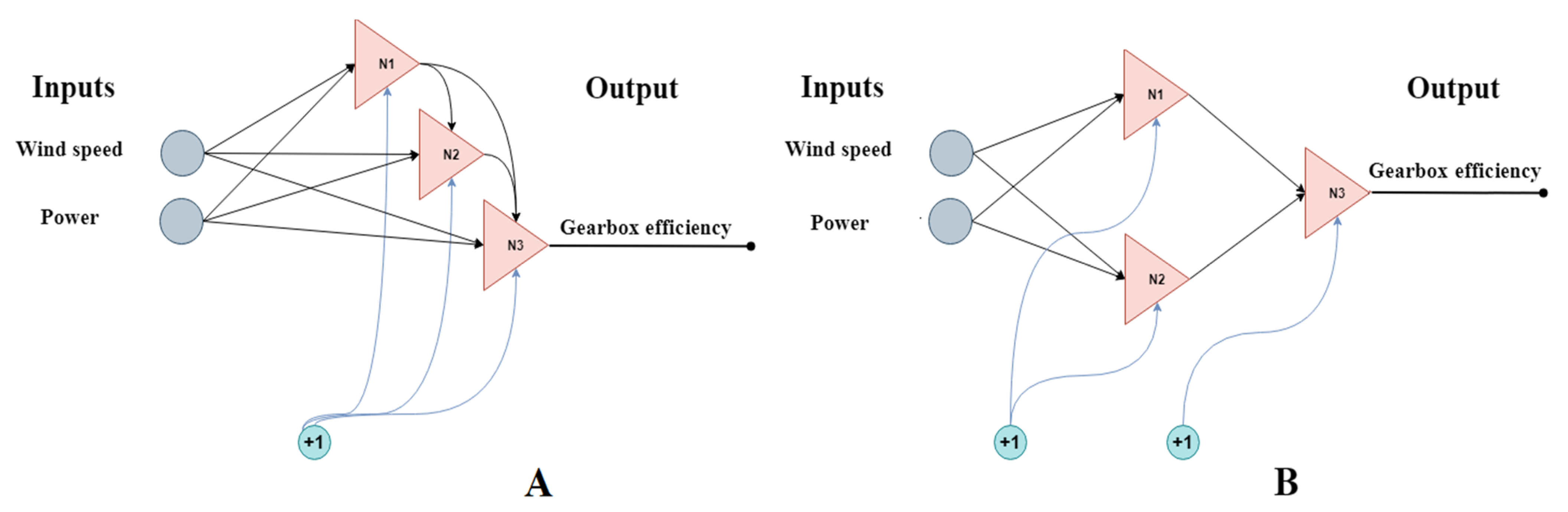
Regarding the prediction models, there were 12 estimated weights for each: input weights (IW) between the inputs and hidden layers and layer weights (LW) between the hidden layers and the output. Two inputs and one output are included in each model. The biases are b1 for the input layers and b2 for the output layer. The weights are taken from the best-trained ANN models based on the lowest RMSE (Model II for both power and gearbox efficiency prediction).
Referring to Equation (3), substituting the values of “der” and “gain” the activation function
can be written as:
then,
where
is the inputs matrix.
Table 5 provides the estimated values of (b1), (b2), (IW), and (LW) from the best-trained ANN model used for power prediction. Similarly,
Table 6 provides the same estimates from the best-trained ANN model developed for gearbox efficiency.
3.4. Power Residuals Calculation
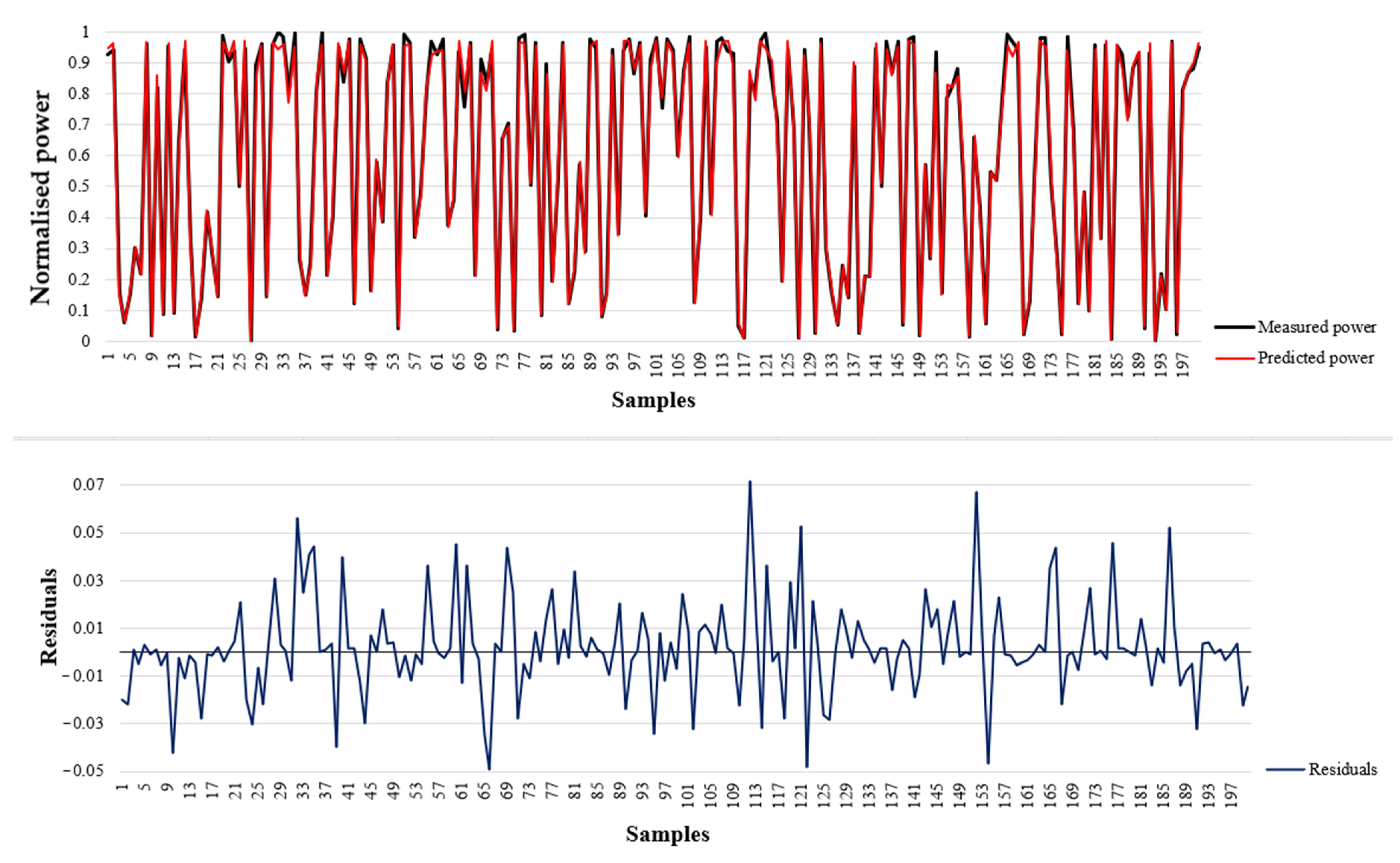
The power residuals based on the ANN model II predictions were calculated using Equation (6).
The statistical summary of the power residuals based on the predictions by the ANN model II used in the monitoring process is presented in
Table 8.
A sample of the normalised measured and predicted power and their calculated residuals are presented in
Figure 9.
It can be noticed from
Figure 9 and
Table 4 that the prediction error (RMSE) is relatively small for both power prediction models; the training and testing RMSEs are relatively close to each other.
To sum up, the validation of the developed prediction models was based on two measures: the performance metrics of the models (RMSE) and the prediction accuracy, using the dataset of operating mode 3, which showed reasonable and accurate results as discussed before.
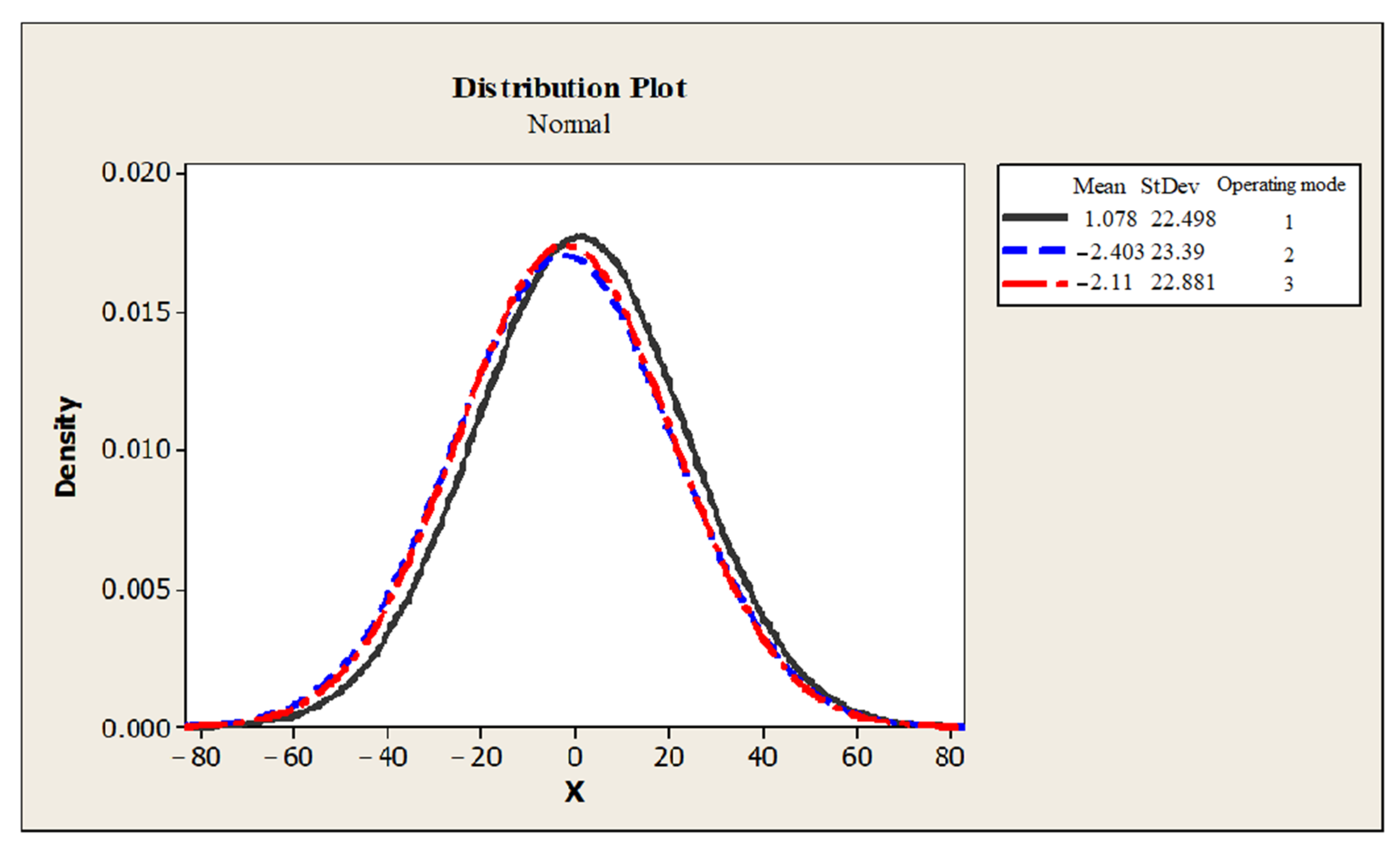
Figure 10 shows the probability plot of power residuals for the three operating modes. From
Table 8 and
Figure 9, it can be observed that the values of the power residuals for the operating modes 1–3 resulting from the ANN model predictions have significant variations. Thus, the mean of each operating mode has indicated that all residuals are shifted toward the negative side due to the increased degradation in the gearbox efficiency.
Figure 10 shows the power residuals probability density function (PDF) predicted by ANN model II for all operating modes, from which we can observe that operational modes 2 and 3 have a small negative shift in their means due to the degradation in both gearbox efficiency and the affected power generation.
3.5. Performance Monitoring Using CUSUM Change Detection Algorithm
The cumulative summation (CUSUM) algorithm is usually utilised for state change detection and performance monitoring. It is known for its robustness in detecting small changes in the mean of the time series which is stationary between two changepoints.
The ANN-NBN model II of the power prediction, as shown in
Table 4, has a small error. Hence, the power prediction model II and its related power curve can be used as a baseline for the monitoring process. Once the WT is operating as the baseline (normal state), the model can provide accurate predictions of the power output along with minor power residuals between the measured and the predicted power. When the WT has abnormal operating conditions, the output variables deviate from the baseline model, and then the model produces increasingly shifted predicted power residuals. Using the ANN model II as a baseline, the performance of each operating mode in terms of the produced power is monitored. The monitoring process aims at detecting any abnormal state change related to the power residuals. The CUSUM change detection algorithm test is performed for that purpose as shown in
Figure 11.
The main goal of the CUSUM test is to compare two hypotheses , which represent the normal and abnormal states of the different operating modes, respectively, to see which one best fits the given datasets.
A scalar set of the ANN predicted power residuals
is used as an input. Assuming that the power residuals have a Gaussian (normal) distribution, then the hypotheses are as follows:
where:
is the unknown change time;
and are the means of the ANN power residuals before and after the potential change, respectively;
is the number of measuring points.
The corresponding log-likelihood ratio
for detecting a change in the mean of the ANN power residuals from
(normal state—operating mode 1) and
(abnormal state—operating mode 2 and 3) can be obtained with Equation (11).
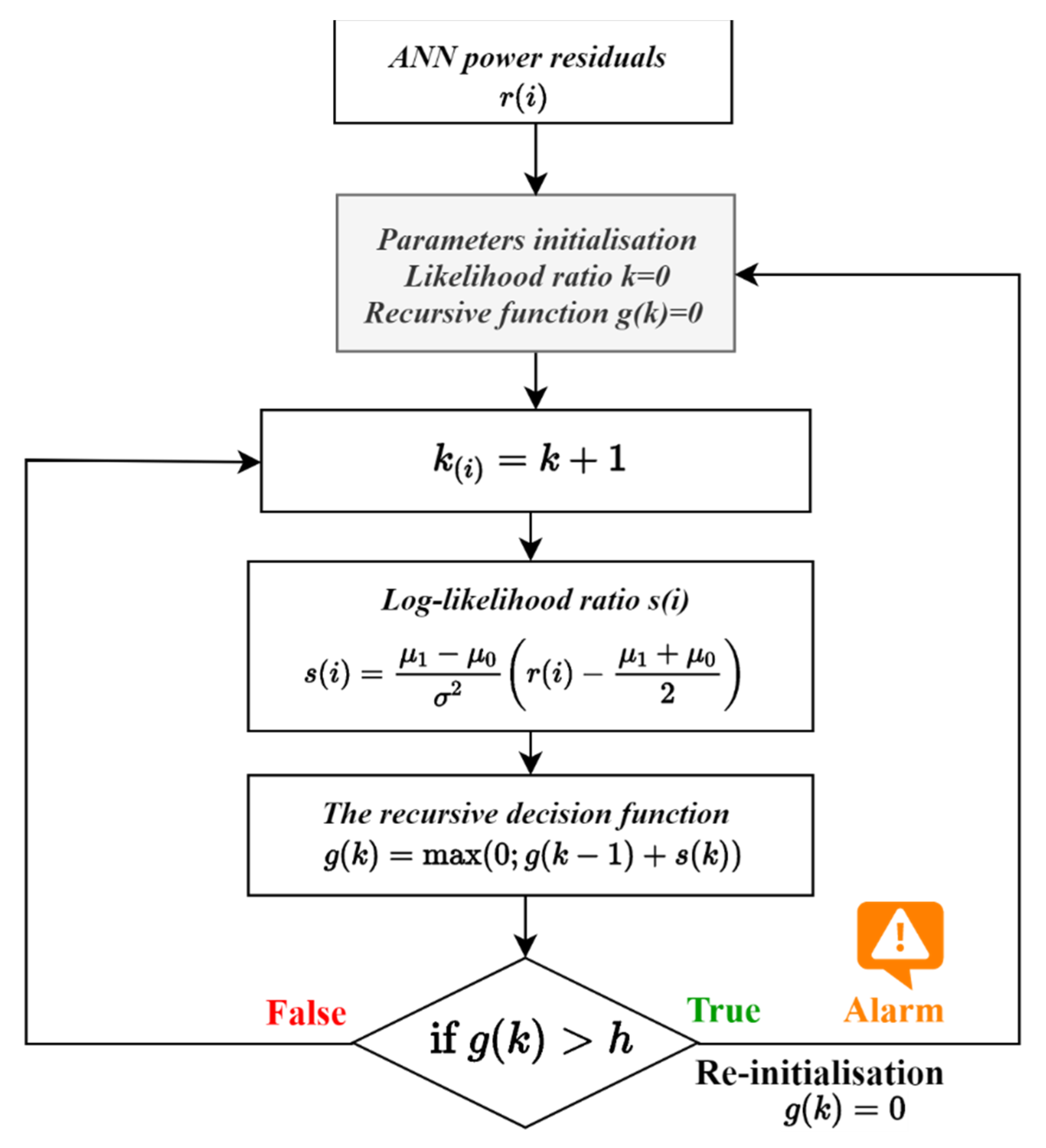
The recursive form of the CUSUM algorithm is an efficient method for performing the CUSUM test. The recursive form of the decision function is calculated as Equation (12).
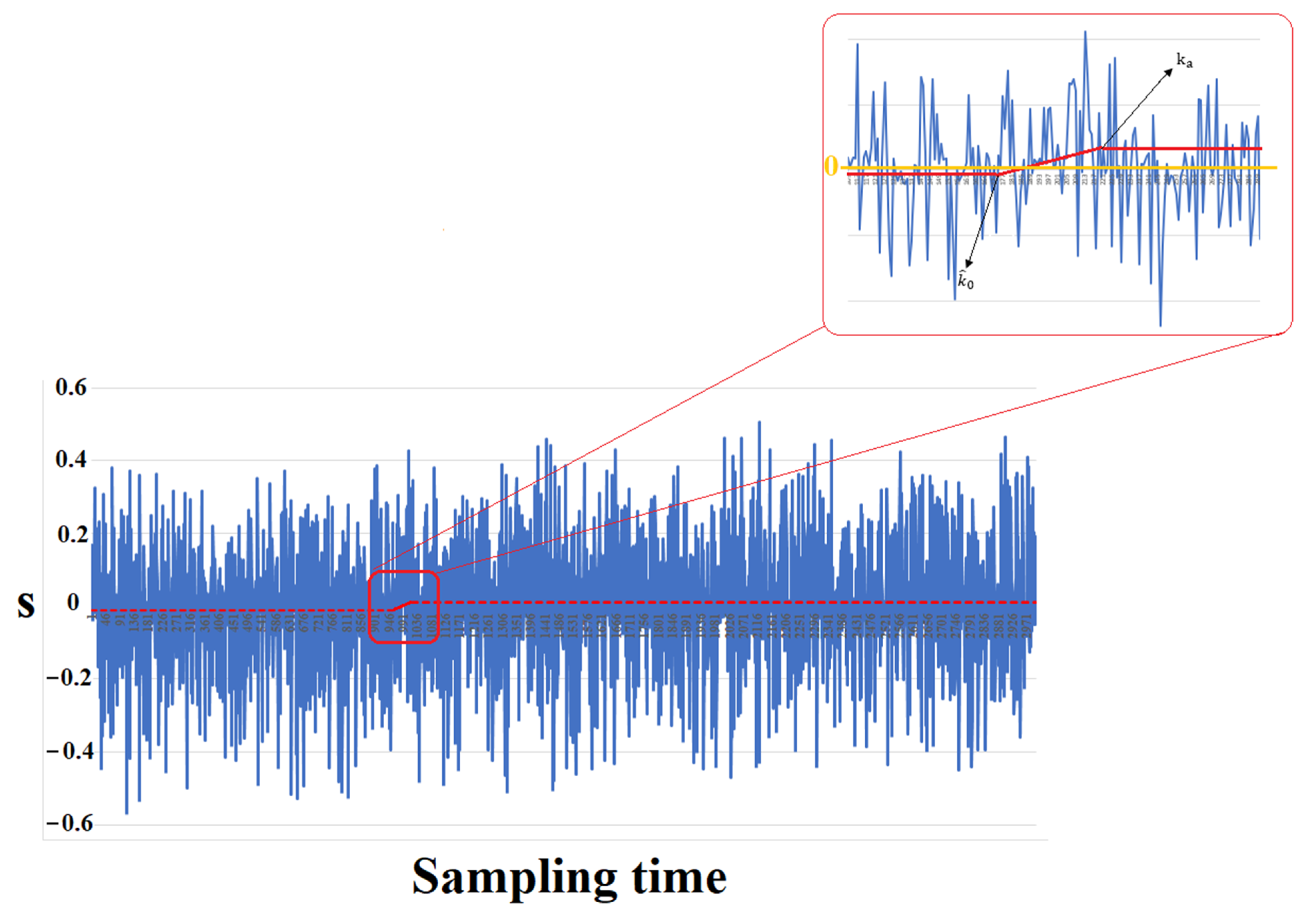
The log-likelihood ratio
has a negative value before the change resulting from the degradation in the gearbox efficiency, and then it has a positive drift after the change along with the change occurrence time
and the stopping time
, as can be seen in
Figure 12.
The alarm function is presented in Equation (13).
A user-defined threshold
is used to make a reasonable balance between a quick-change detection and a low false alarm rate;
is always positive; only the contributions to the cumulative sum that add up to a positive number must be considered to determine the decision function [
57].
To avoid or reduce the false alarms and missed change detections caused by the parameter variations, the
must consider the maximum magnitudes of residuals under the normal state of the operating mode, and then the threshold can be calculated as Equation (14).
The stopping time
, which can be called alarm time as well, is the time instant at which
crosses the
.
The change occurrence time
can be estimated as the time instant
at which
changes from negative to positive slope as indicated by Equation (16).
is the number of successive observations in which the decision function remains positive, as expressed in Equation (17).
where
is the indicator of event
, namely,
= 1 when
is true, otherwise
= 0.
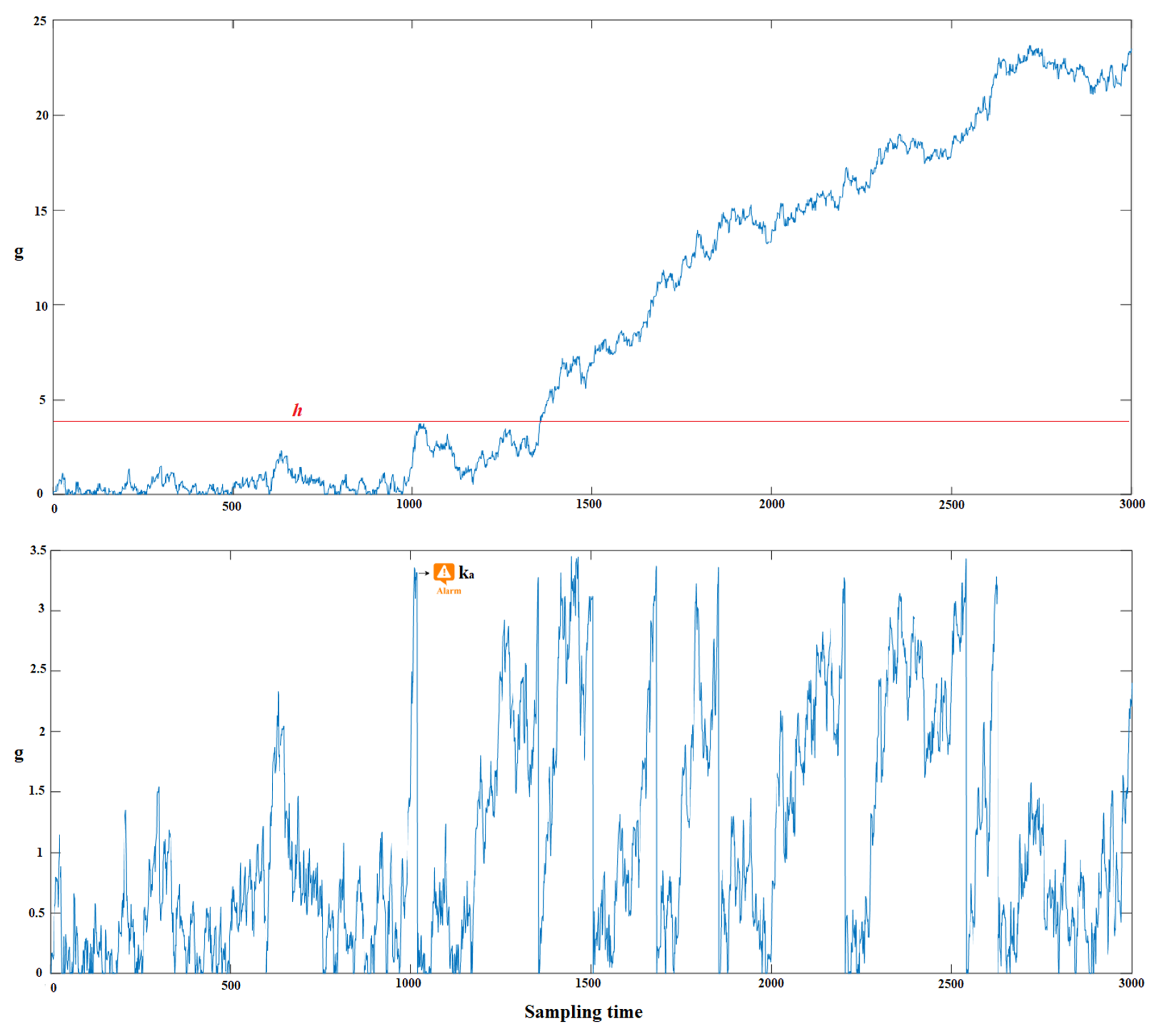
Figure 13 shows the recursive CUSUM decision function of the ANN power residuals for the three operating modes, in which the first operating mode is considered normal and the others as abnormal states in terms of the degraded gearbox efficiency. The upper chart presents the recursive CUSUM without re-initialisation, where
. While the lower chart presents the recursive CUSUM with re-initialisation once
is crossed (
). The stopping time (alarm)
= 1018 is also shown there.
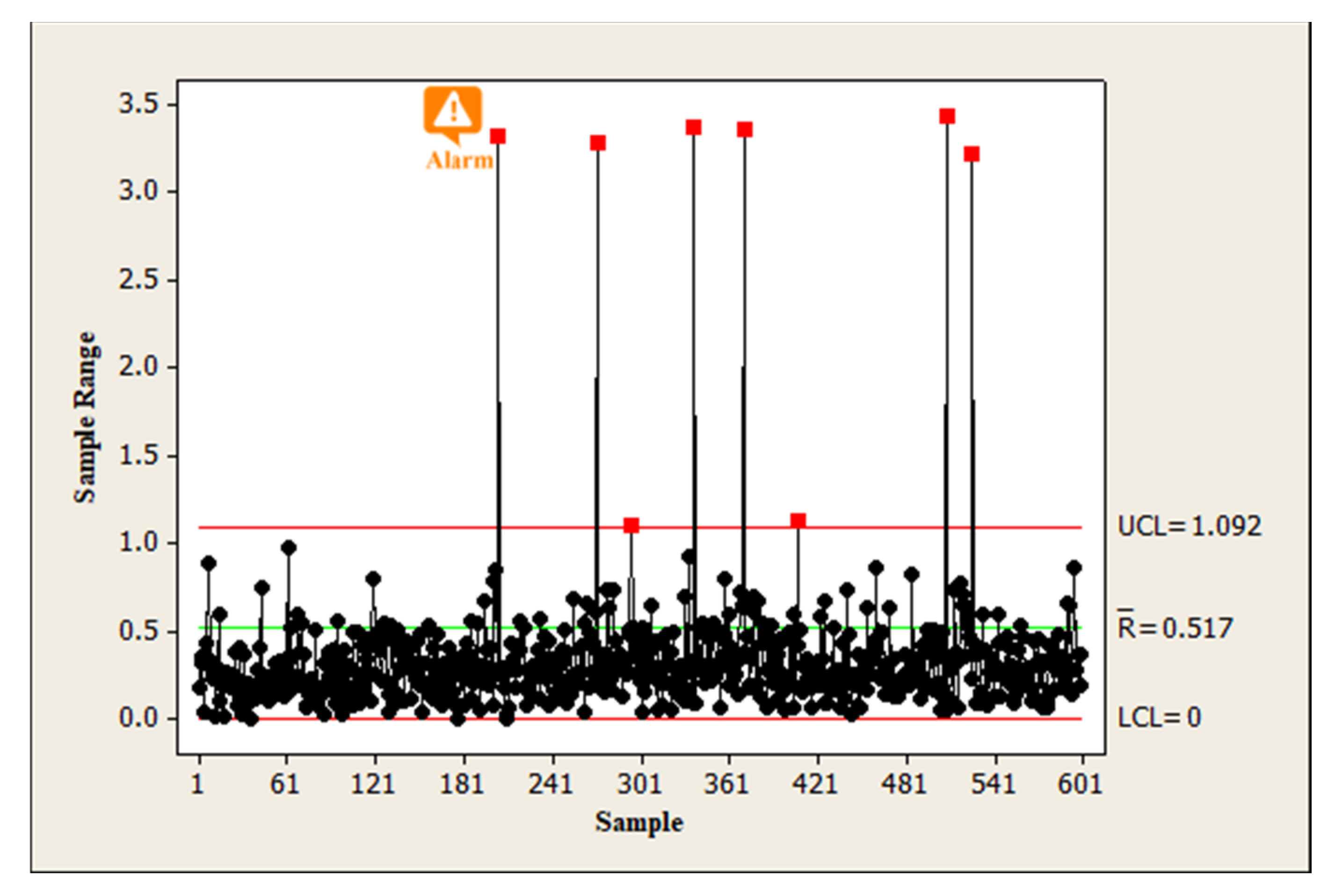
R-control chart as in
Figure 14 is used to simplify the representation of the CUSUM results depicted in
Figure 13 (lower chart).
As depicted in
Figure 13 (upper chart), during the state change occurrence, the CUSUM of the log-likelihood ratio (
) start increasing. Larger efficiency degradation indicates a higher slope. On the other hand, it can be seen in
Figure 13 (lower chart) and
Figure 14 that eight points are located in the out-of-control region (out of the upper control limit—UCL); these points represent the stopping alarms detected using the CUSUM. The first stopping alarm is triggered when the first state change is detected using the CUSUM; the other alarms indicate the continuous degradation in the gearbox efficiency as the slope increases, as shown in
Figure 13 (upper chart).
The threshold
was selected to avoid false alarms. However, a change detection time delay
might occur accordingly, as seen in Equation (18). Thus, there is a trade-off between the false alarms and the detection time.
Table 9 below summarises the performance monitoring results of the evaluated ANN power residuals for the three operating modes based on the gearbox efficiency degradation.
The monitoring method based on ANN predictions and CUSUM algorithm developed for the state change detection of gearbox efficiency offers a reliable analysis of the power generation process. This methodology also provides an early warning system for performance and condition monitoring, which helps prevent severe failure occurrences that might lead to long shutdowns of the WT. It is worth mentioning that triggering early alarms in advanced stages () is an important indicator that can be used by the maintenance crew for better maintenance action decision-making. The process state based on the triggered alarms should be further investigated by the maintenance expert to eliminate the root causes of the detected state change. In our case, the detected state change resulted from the degraded gearbox efficiency leading to a degraded power generation process.
As indicated in the performance monitoring results, the first state change alarm and the estimated state change occurrence time (early warning) helps the maintenance expert to respond effectively and make decisions; accordingly, this helps in reducing the effects of unexpected shutdowns and maintenance costs as well
In summary, the monitoring results of the power prediction ANN model can be used as an efficient tool to monitor the performance of the WT by analysing the triggered alarms and the existing power residuals, which probably indicate abnormal variations of the WT performance. Moreover, the monitoring results can be used for further analysis, such as fault detection and prediction. On the other hand, the results of the gearbox efficiency prediction ANN model can be used in two ways. First, comparing the predicted gearbox efficiency in a specific time frame with a threshold provided by the manufacturer to monitor the efficiency degradation over time. Secondly, the remaining useful life of the gearbox based on its efficiency over several time cycles can be estimated based on the predicted and expected efficiencies and the efficiency threshold provided by the manufacturer. This helps in performing better maintenance plans and schedules.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}