
Natural Frequency Analysis of Horizontal Piping System Conveying Low Viscosity Oil–Gas–Water Slug Flow

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
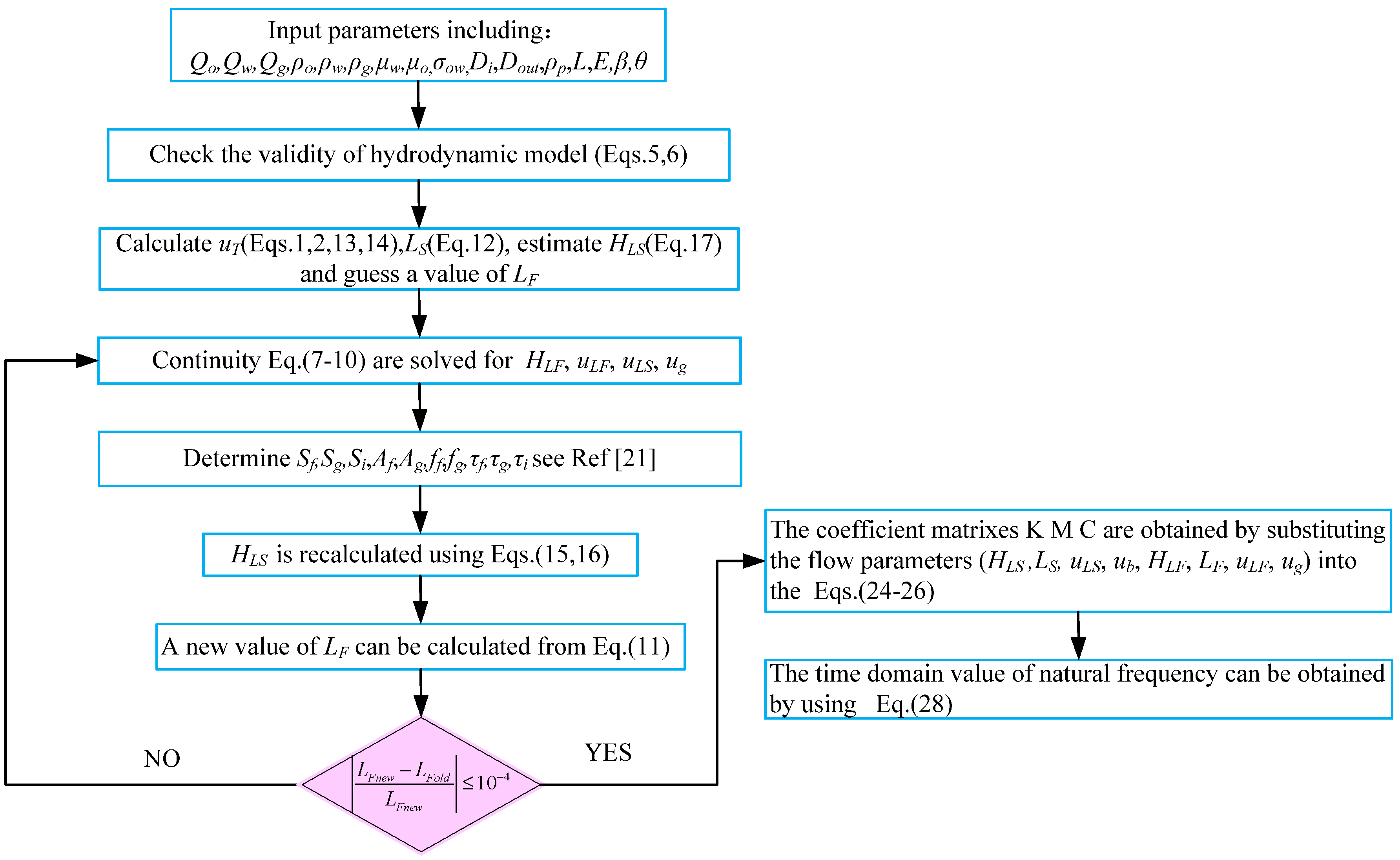
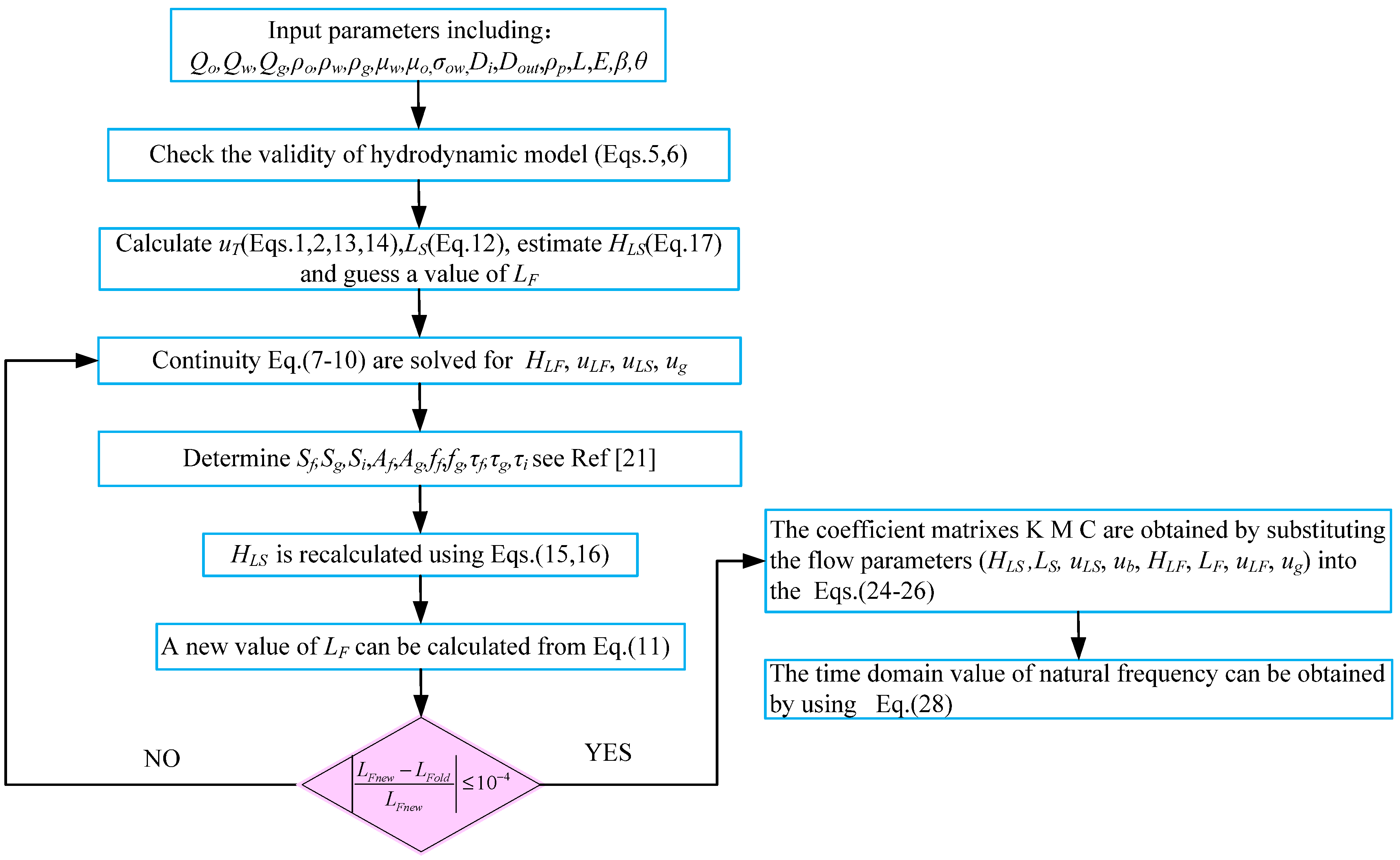
2. Methods
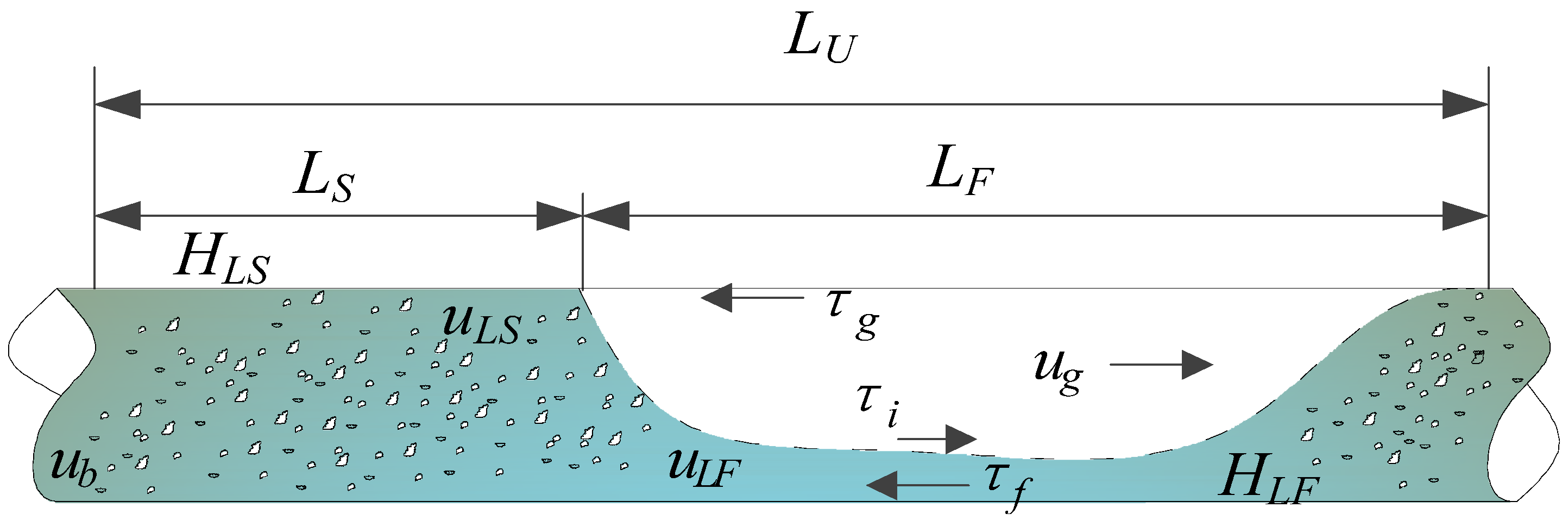
2.1. Hydrodynamic Model of Low-Viscosity Oil–Gas–Water Homogeneous Slug Flow
- That the oil-water mixture was considered homogeneous;
- That the slug flow was a stable flow state, with each slug unit propagating at the translational velocity (uT) in the horizontal pipe; and
- That the oil, gas, and water were incompressible fluids.
2.2. Vibration Equation for Pipes Conveying Low-Viscosity Oil–Gas–Water Homogeneous Slug Flow
3. Results and Discussion
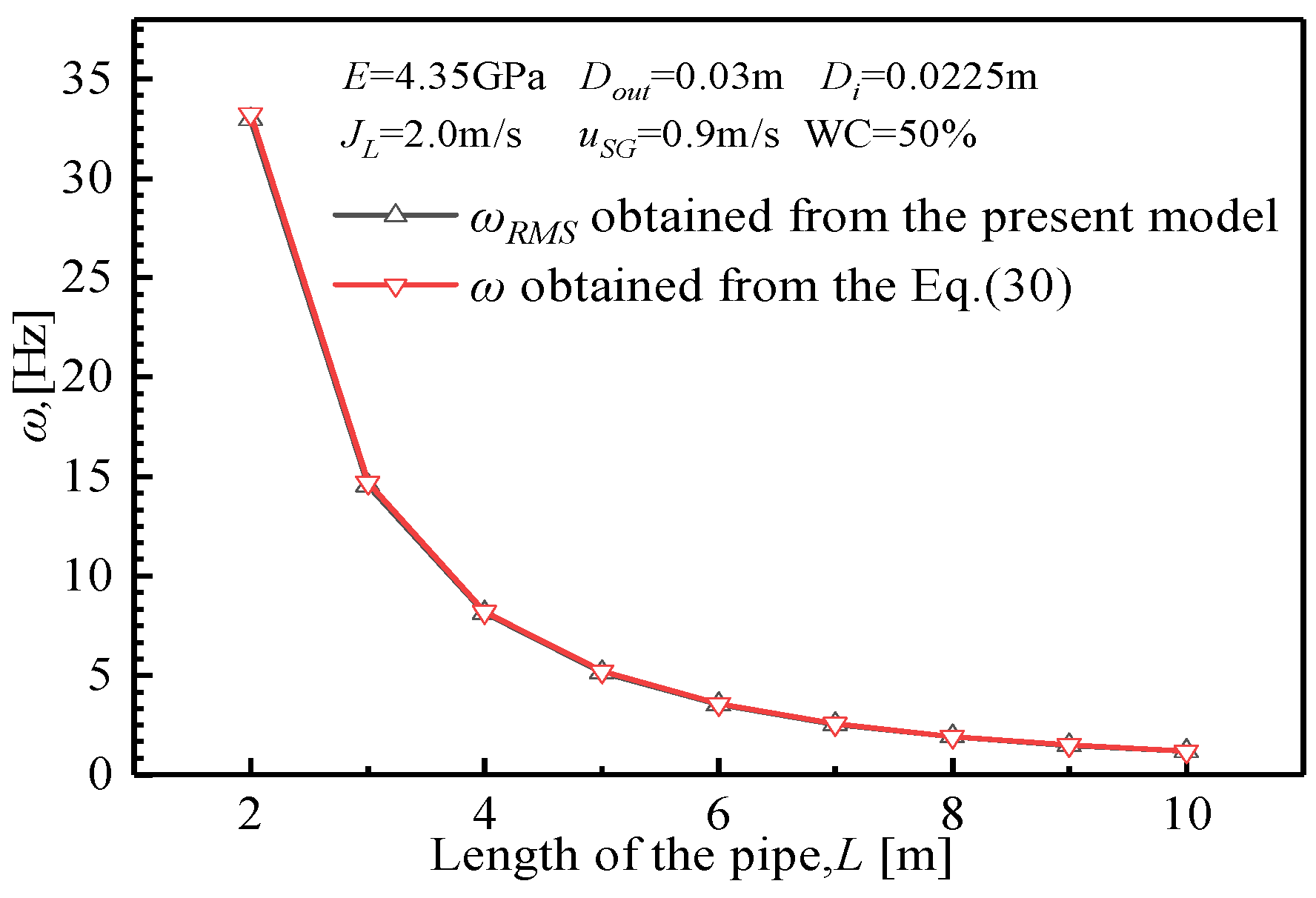
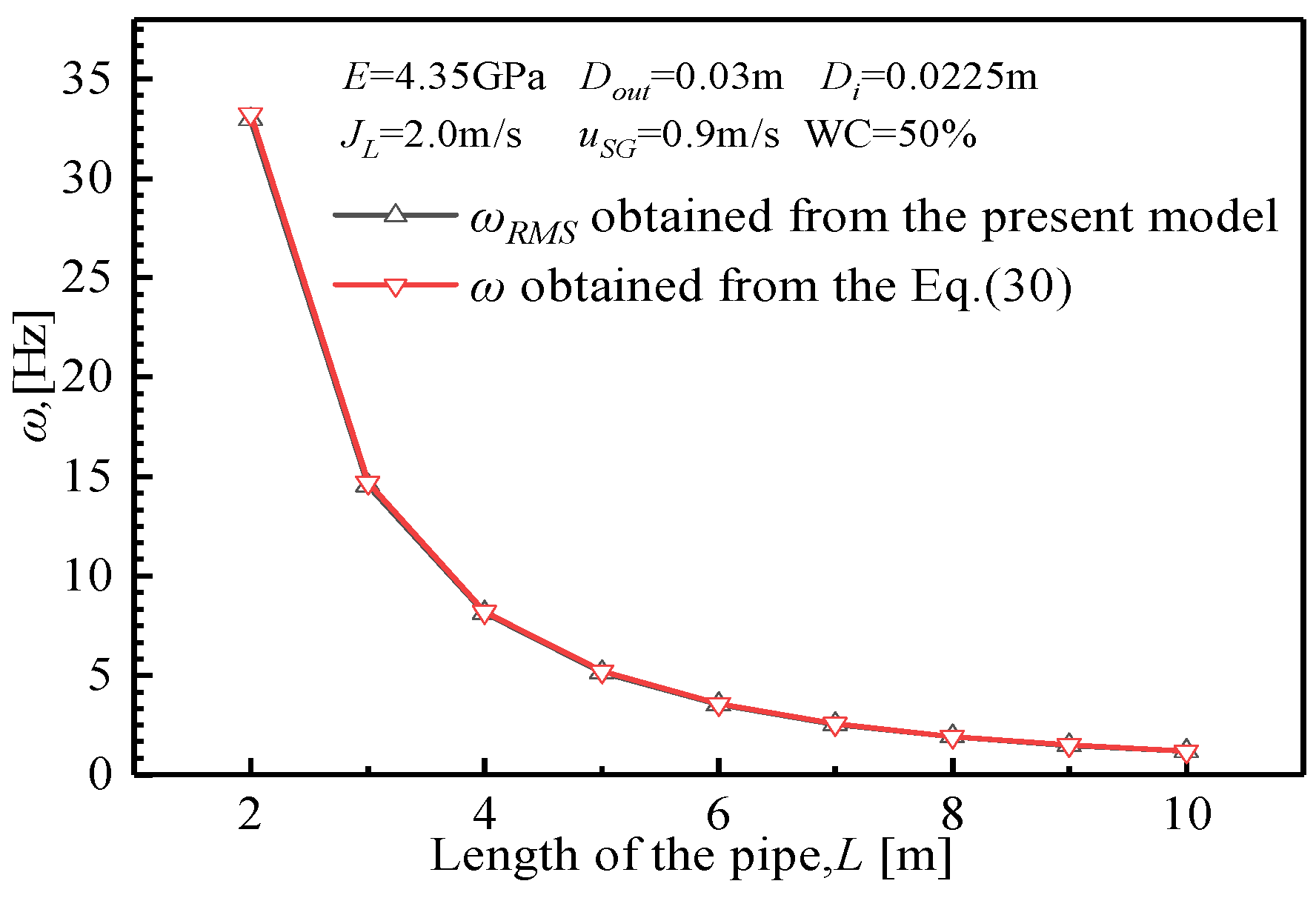
3.1. Model Validation
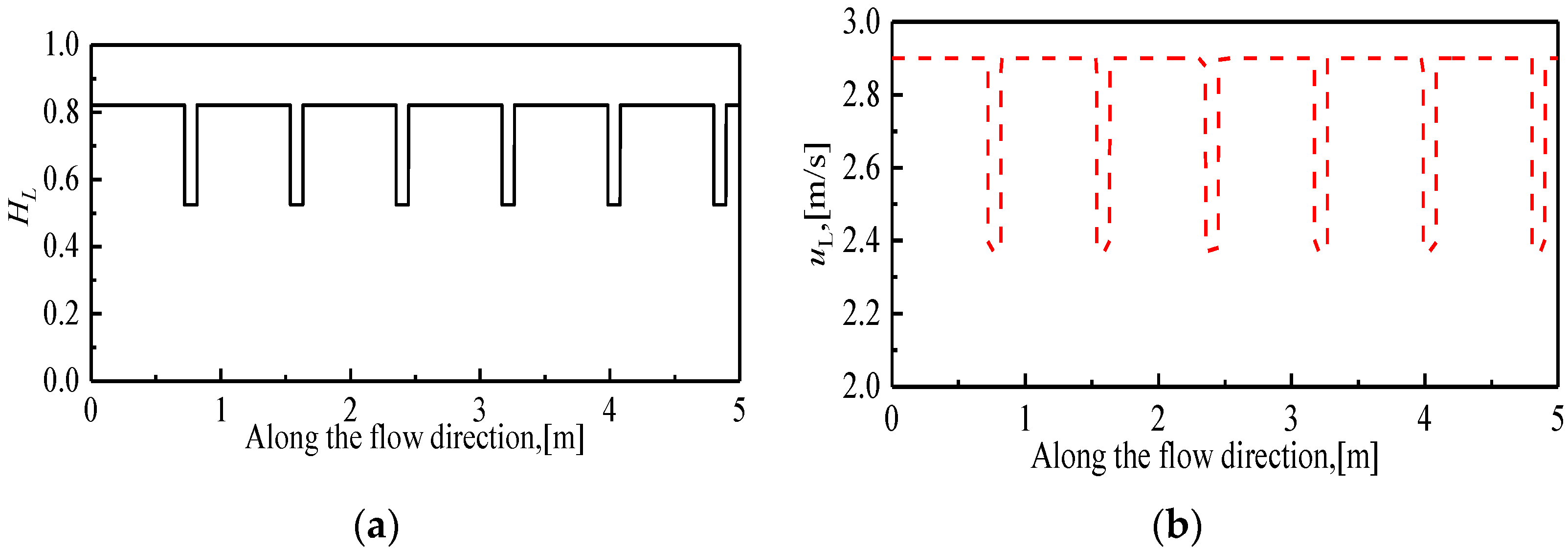
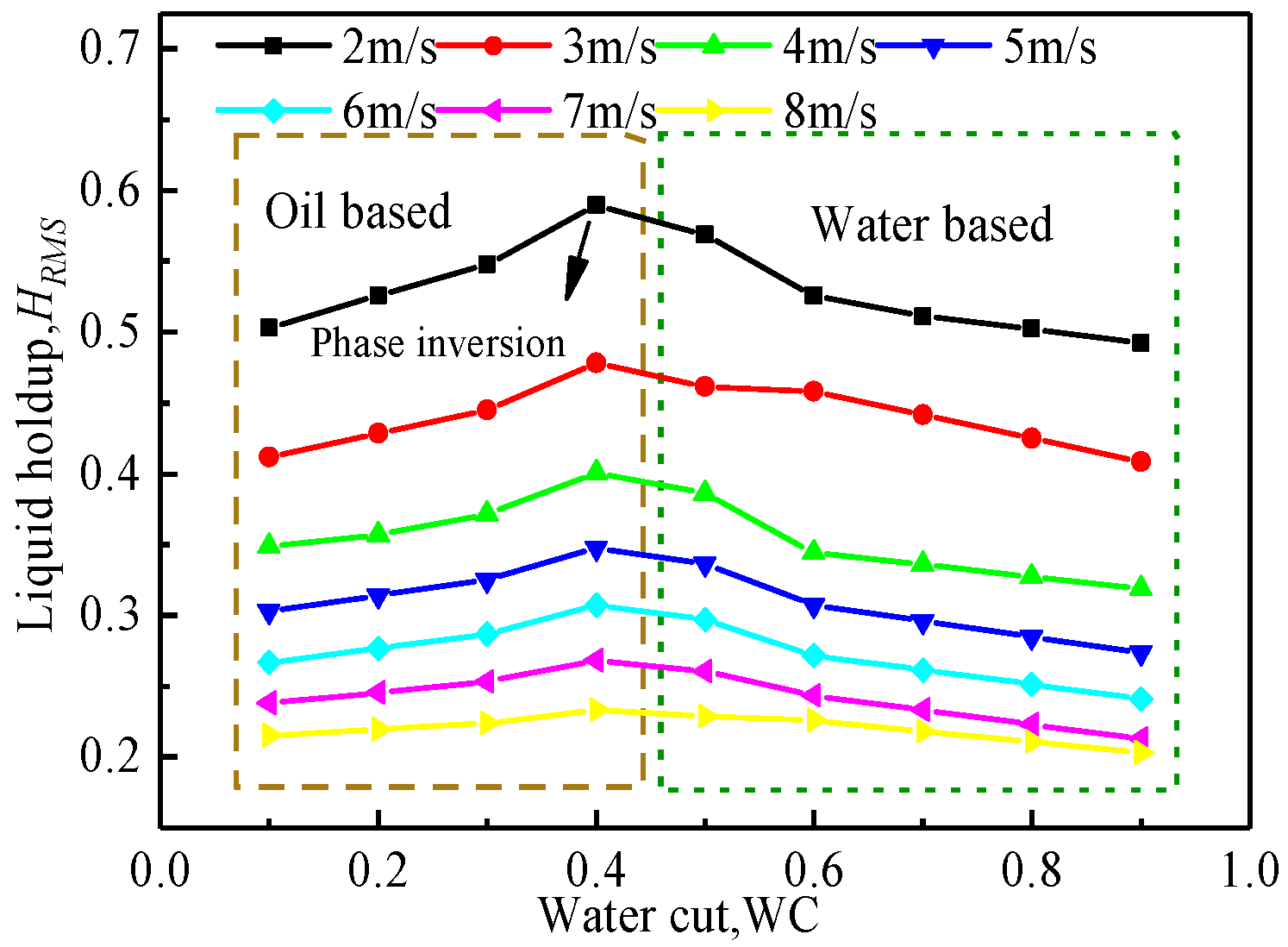
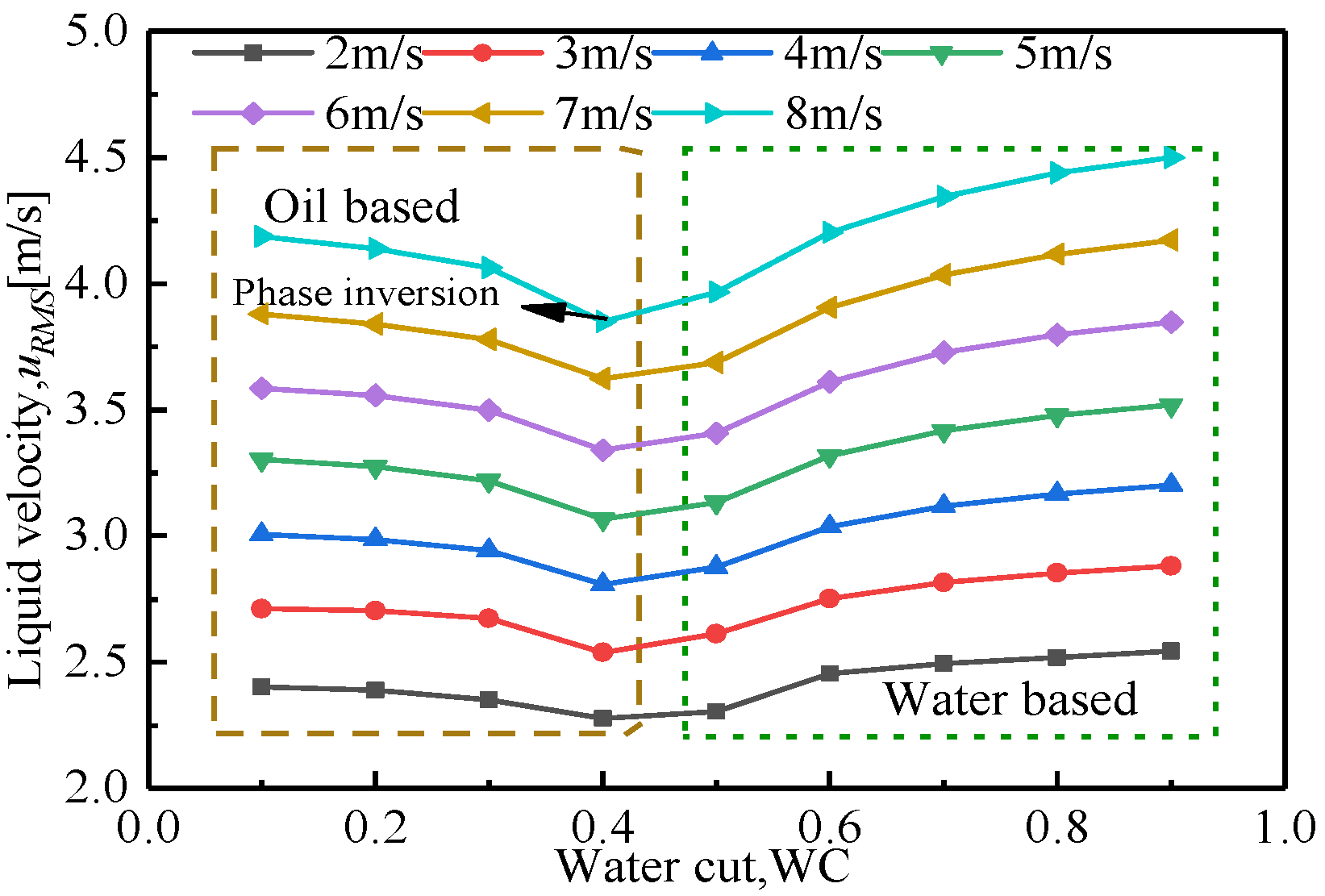
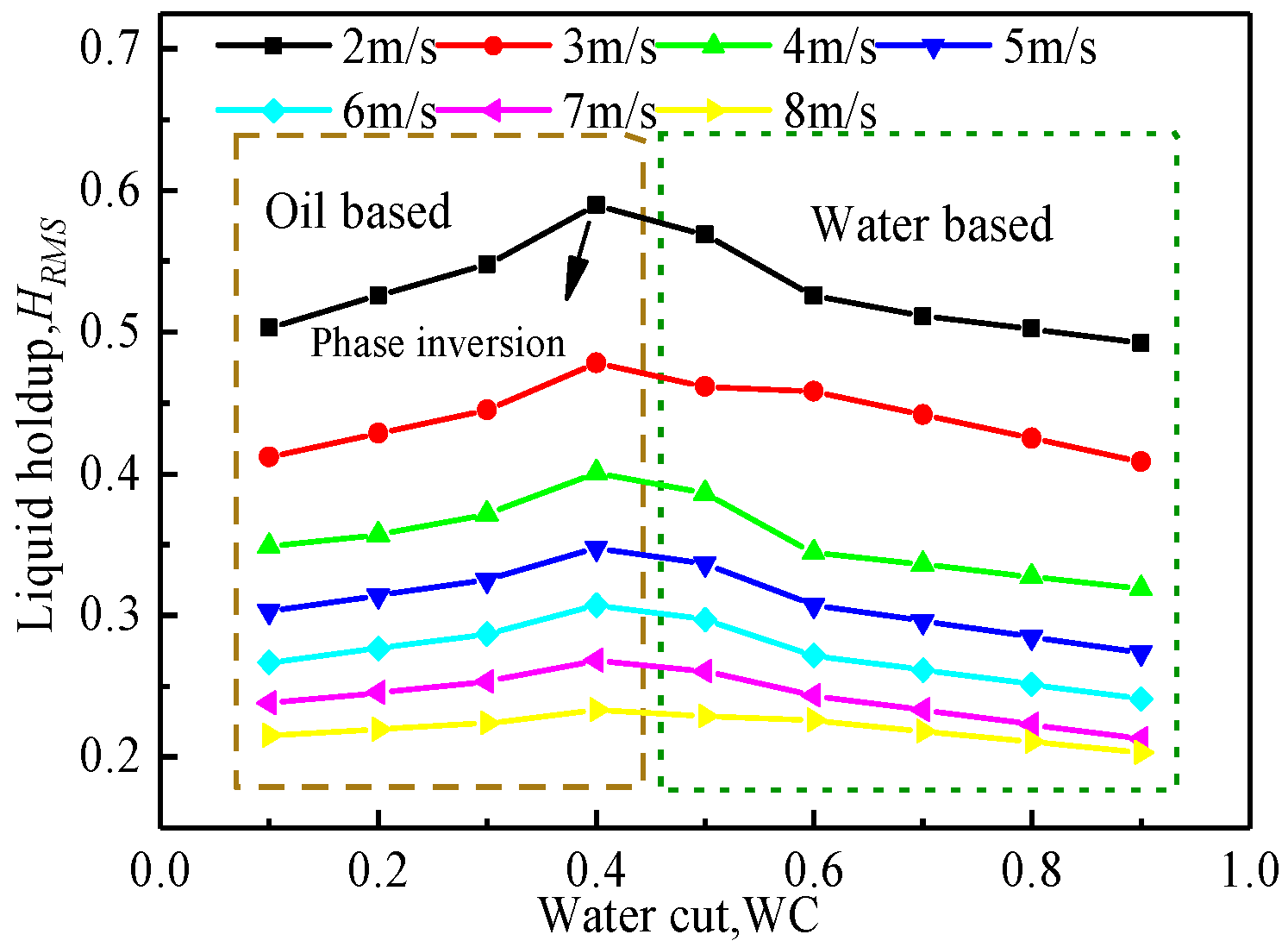
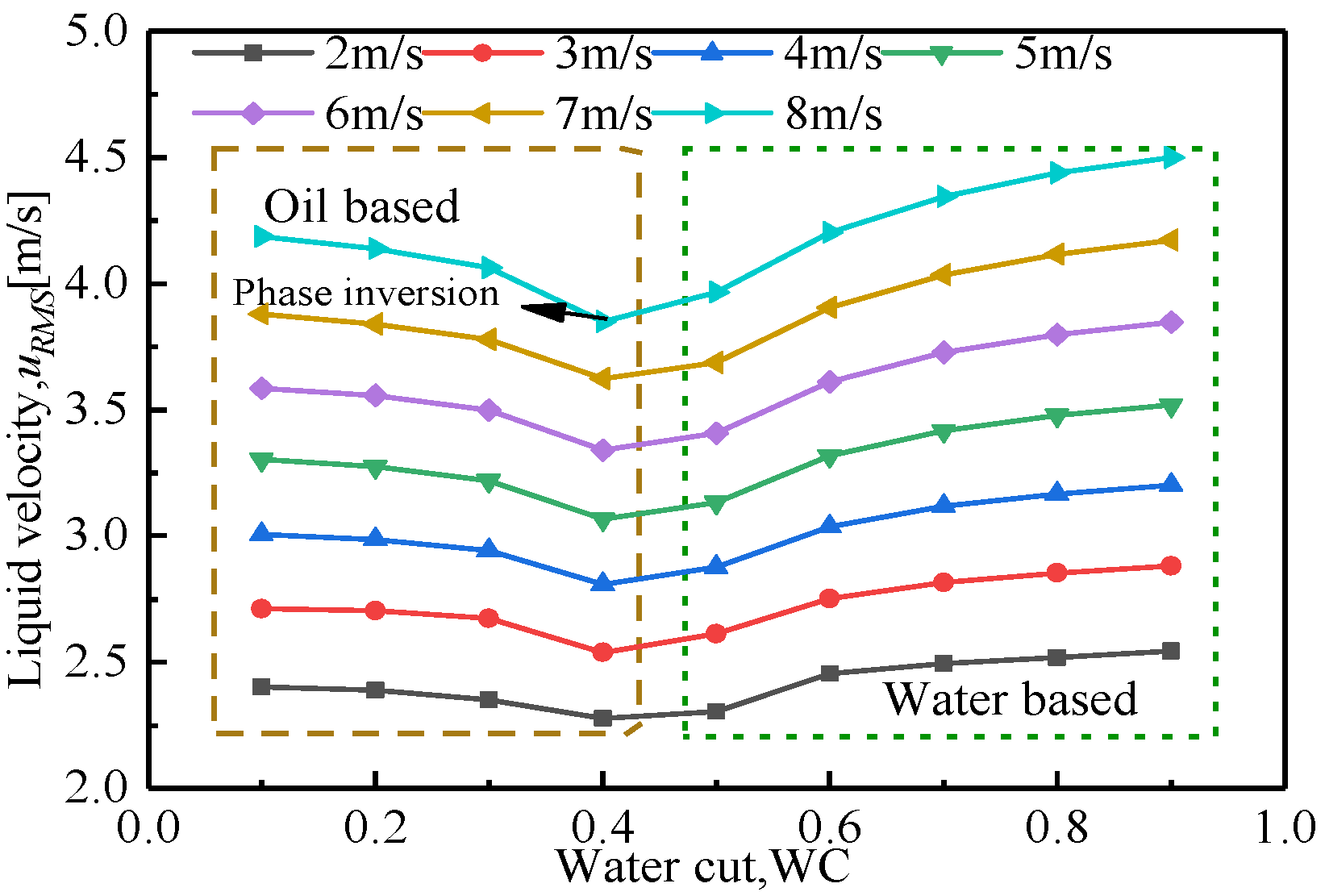
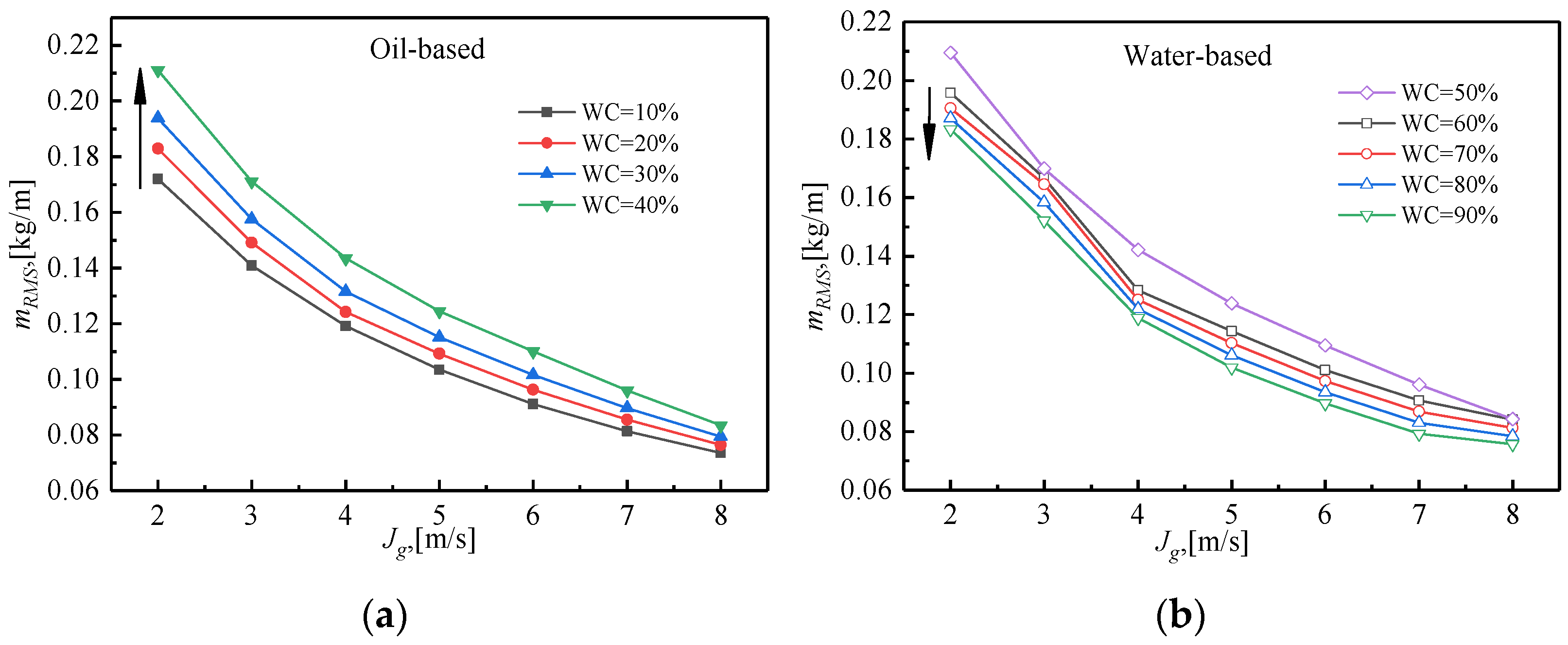
3.2. Effect of WC on Liquid Holdup and Liquid Velocity
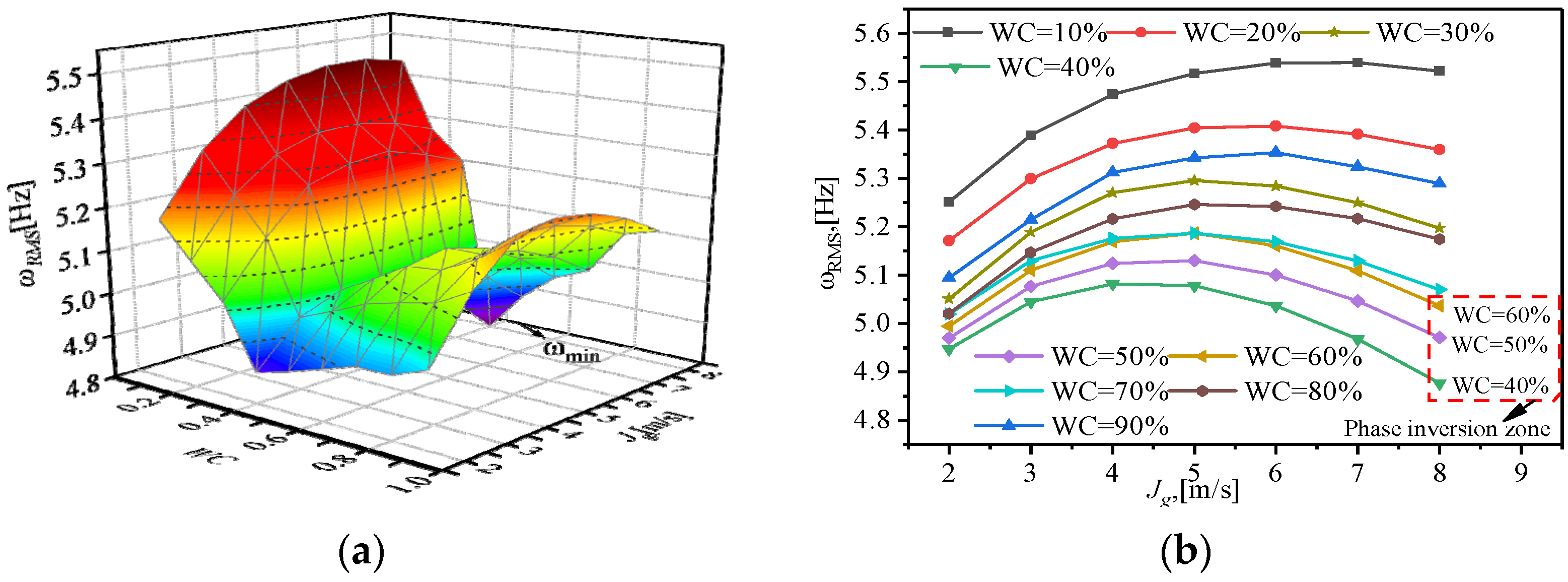
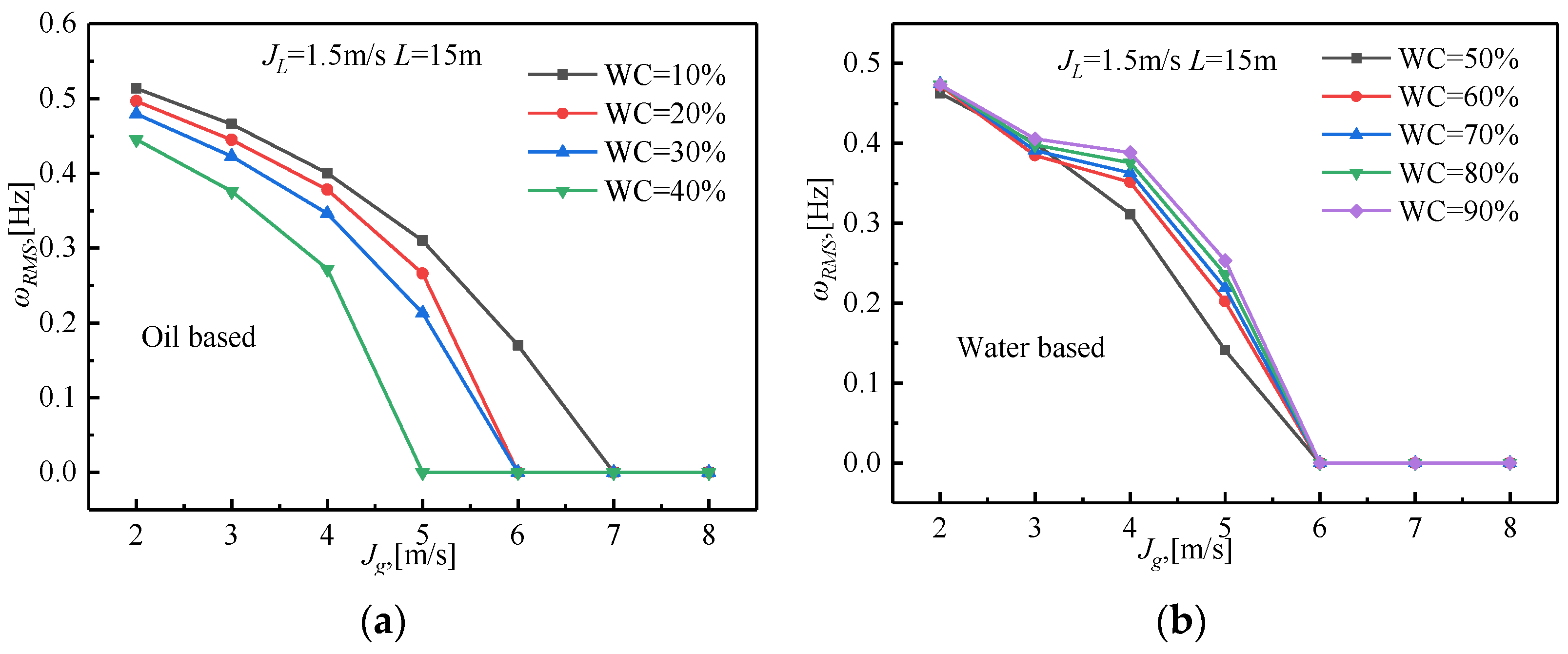
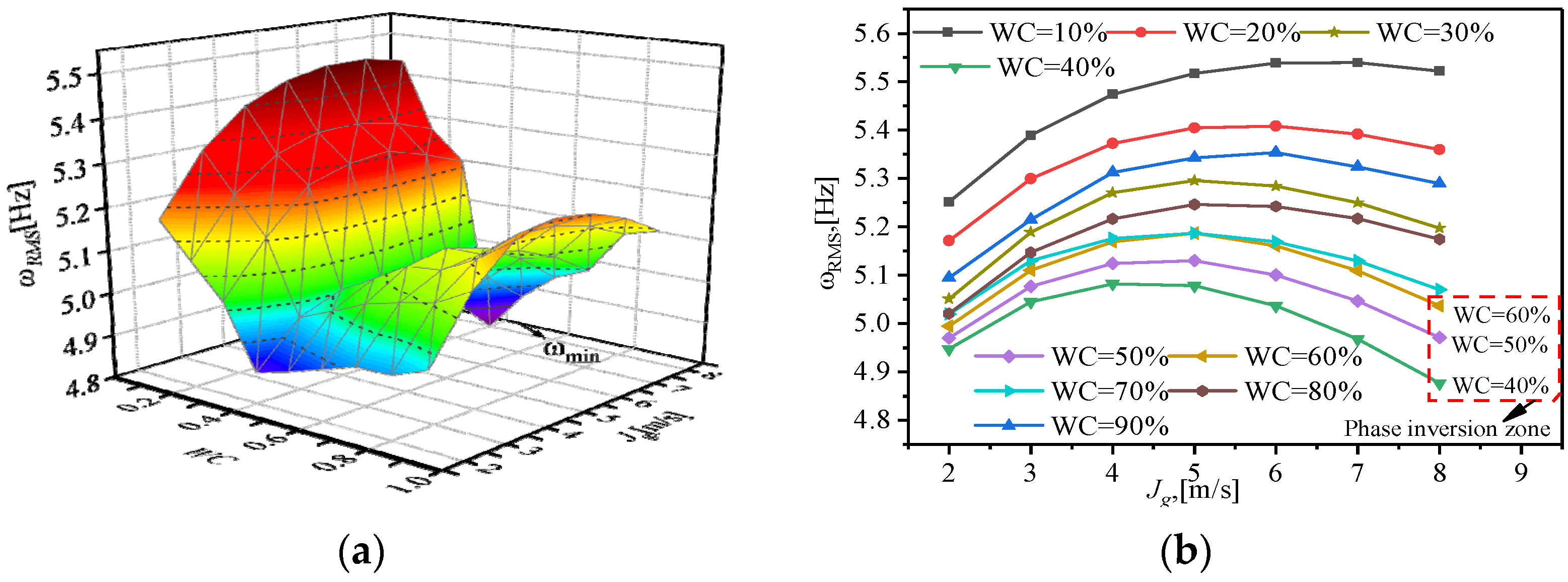
3.3. Effect of WC on Natural Frequency
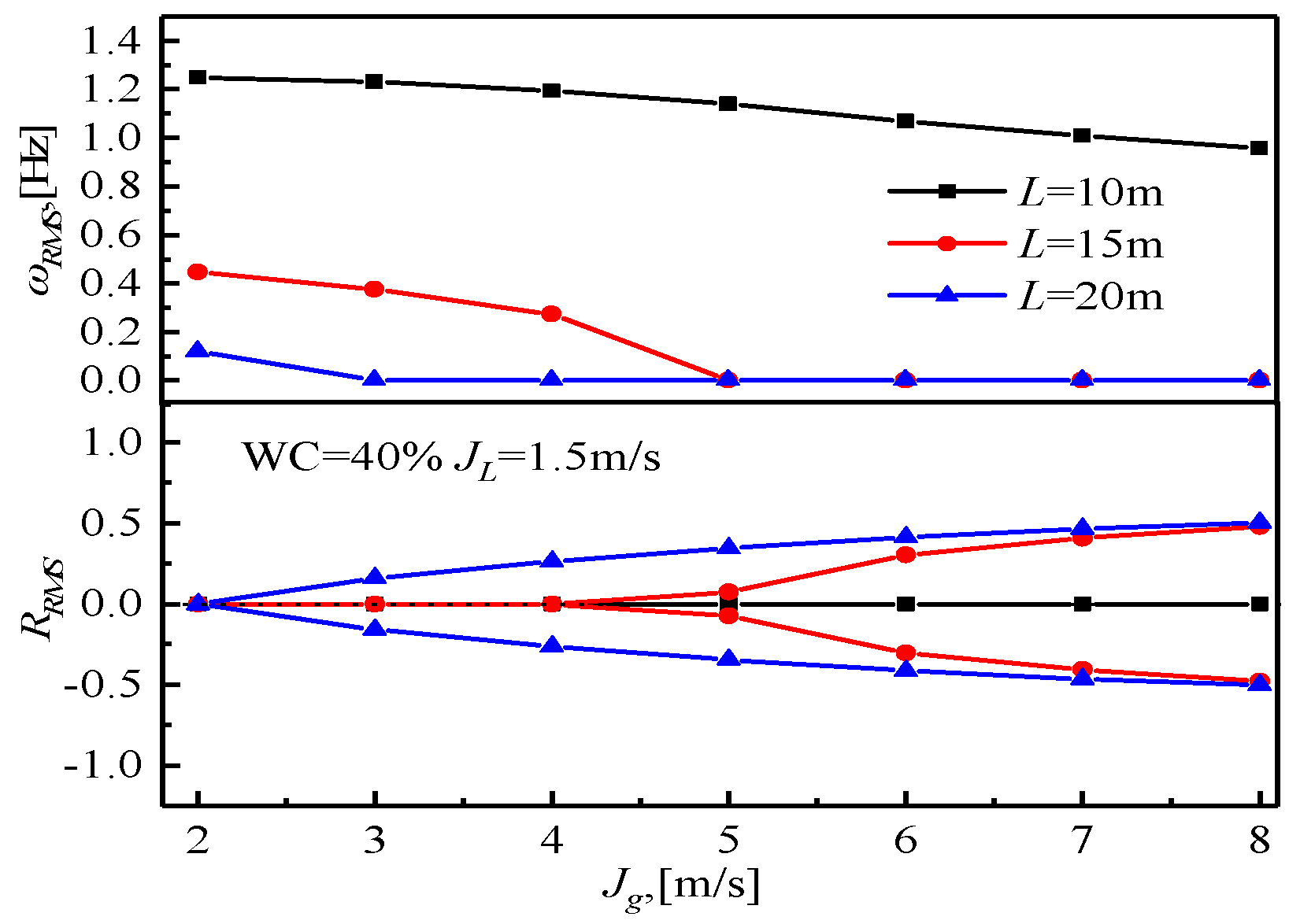
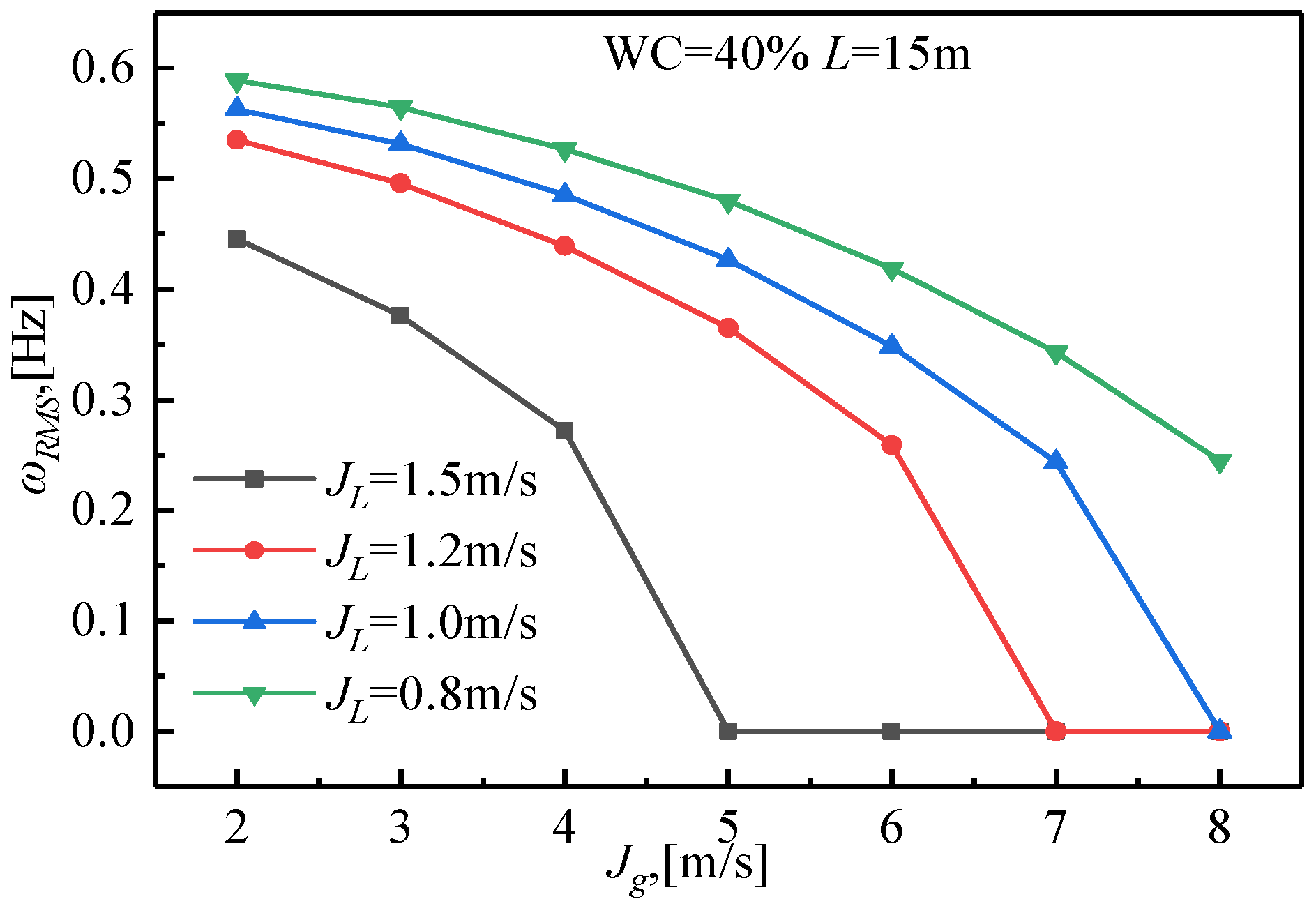
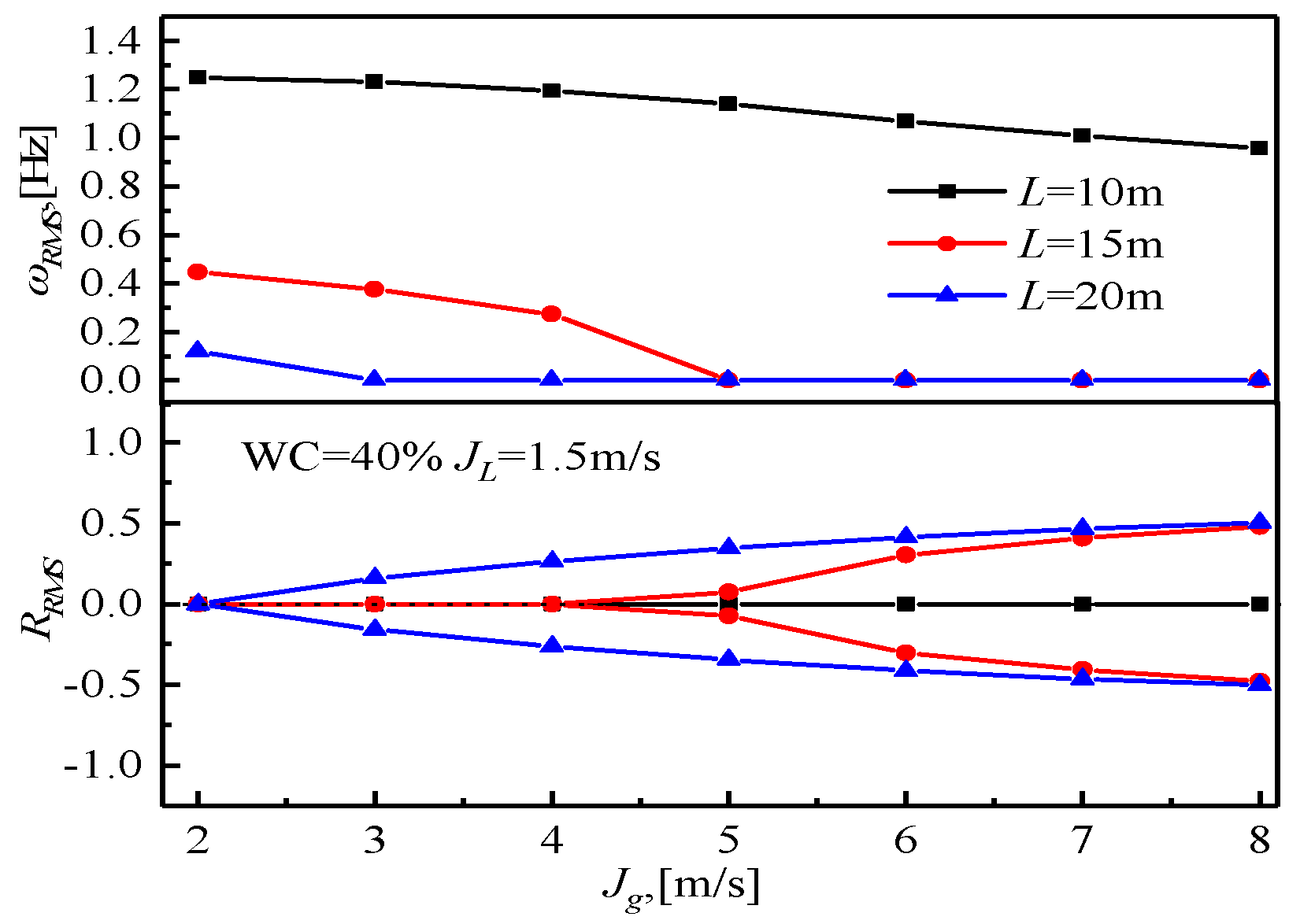
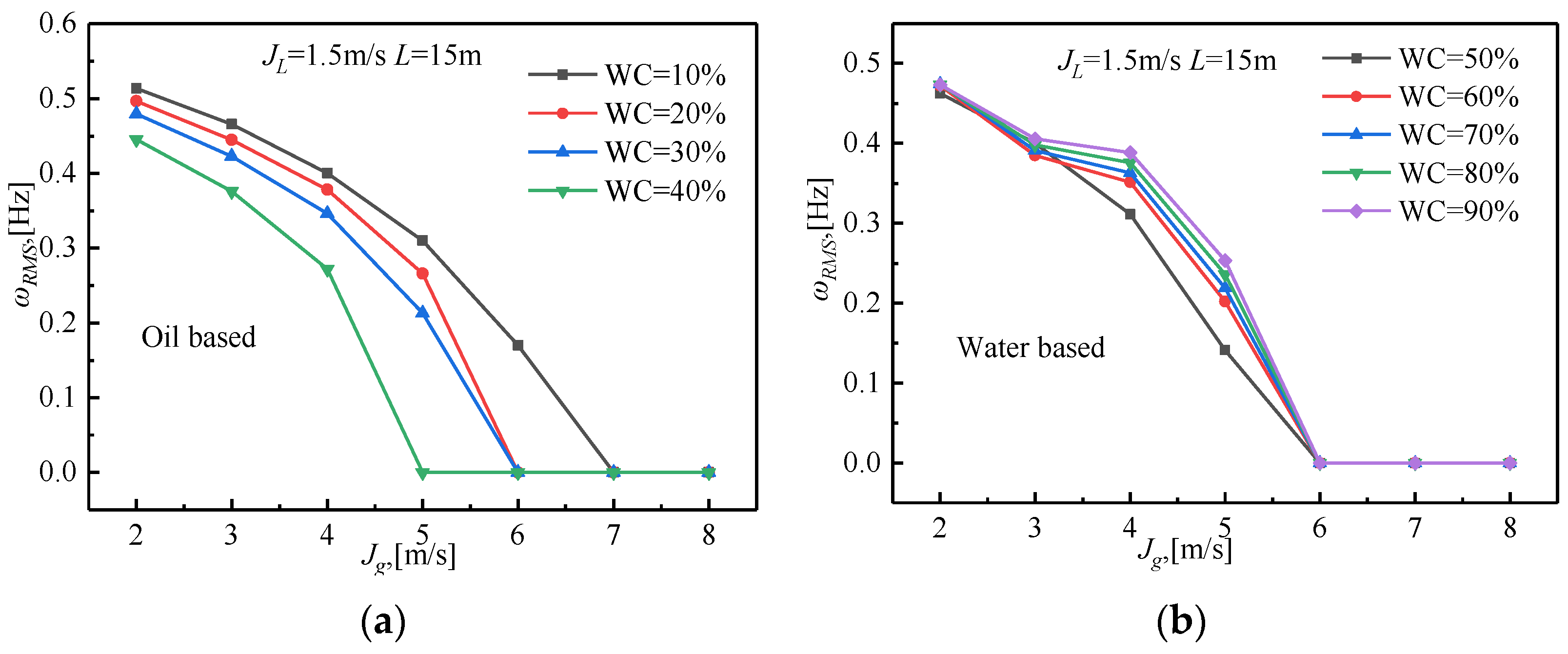
3.4. Influencing Factors of the Critical Gas Velocity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paıdoussis, M.; Li, G. Pipes conveying fluid: A model dynamical problem. J. Fluids Struct. 1993, 7, 137–204. [Google Scholar] [CrossRef]
- Miwa, S.; Mori, M.; Hibiki, T. Two-phase flow induced vibration in piping systems. Prog. Nucl. Energy 2015, 78, 270–284. [Google Scholar] [CrossRef]
- Al-Hadhrami, L.M.; Shaahid, S.; Tunde, L.O.; Al-Sarkhi, A. Experimental study on the flow regimes and pressure gradients of air-oil-water three-phase flow in horizontal pipes. Sci. World J. 2014, 2014, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rahmanian, M.; Firouz-Abadi, R.; Cigeroglu, E. Dynamics and stability of conical/cylindrical shells conveying subsonic compressible fluid flows with general boundary conditions. Int. J. Mech. Sci. 2017, 120, 42–61. [Google Scholar] [CrossRef]
- Wang, L. A further study on the non-linear dynamics of simply supported pipes conveying pulsating fluid. Int. J. Non-Linear Mech. 2009, 44, 115–121. [Google Scholar] [CrossRef]
- Huang, Y.-M.; Liu, Y.-S.; Li, B.-H.; Li, Y.-J.; Yue, Z.-F. Natural frequency analysis of fluid conveying pipeline with different boundary conditions. Nucl. Eng. Des. 2010, 240, 461–467. [Google Scholar]
- Wang, L.; Dai, H.; Qian, Q. Dynamics of simply supported fluid-conveying pipes with geometric imperfections. J. Fluids Struct. 2012, 29, 97–106. [Google Scholar] [CrossRef]
- Liu, Y.; Miwa, S.; Hibiki, T.; Ishii, M.; Morita, H.; Kondoh, Y.; Tanimoto, K. Experimental study of internal two-phase flow induced fluctuating force on a 90 elbow. Chem. Eng. Sci. 2012, 76, 173–187. [Google Scholar] [CrossRef]
- An, C.; Su, J. Vibration behavior of marine risers conveying gas-liquid two-phase flow. In International Conference on Offshore Mechanics and Arctic Engineering; American Society of Mechanical Engineers: New York City, NY, USA, 2015; p. V05AT4A016. [Google Scholar]
- Giraudeau, M.; Mureithi, N.; Pettigrew, M. Two-phase flow-induced forces on piping in vertical upward flow: Excitation mechanisms and correlation models. J. Press. Vessel. Technol. 2013, 135, 030907. [Google Scholar] [CrossRef]
- Zhang, H.-Q.; Sarica, C. Unified Modeling of Gas/Oil/Water-Pipe Flow-Basic Approaches and Preliminary Validation. SPE Proj. Facil. Constr. 2006, 1, 1–7. [Google Scholar] [CrossRef]
- Zhao, J.M.; Gong, J.; Yu, D. Oil-Gas-Water Three-Phase Slug Flow Liquid Holdup Model in Horizontal Pipeline. In Proceedings of the International Pipeline Conference, Calgary, AB, Canada, 25–29 September 2006; pp. 183–190. [Google Scholar]
- Dehkordi, P.B.; Colombo, L.; Mohammadian, E.; Shahrabadi, A.; Azdarpour, A. A mechanistic model to predict pressure drop and holdup pertinent to horizontal gas-liquid-liquid intermittent flow. Chem. Eng. Res. Des. 2019, 149, 182–194. [Google Scholar] [CrossRef] [Green Version]
- Meng, S.; Chen, Y.; Che, C. Slug flow’s intermittent feature affects VIV responses of flexible marine risers. Ocean. Eng. 2020, 205, 106883. [Google Scholar] [CrossRef]
- Azevedo, G.; Baliño, J.; Burr, K. Influence of pipeline modeling in stability analysis for severe slugging. Chem. Eng. Sci. 2017, 161, 1–13. [Google Scholar] [CrossRef]
- Khudayarov, B.; Komilova, K.M. Vibration and dynamic stability of composite pipelines conveying a two-phase fluid flows. Eng. Fail. Anal. 2019, 104, 500–512. [Google Scholar] [CrossRef]
- Liu, G.; Wang, Y. Study on the natural frequencies of pipes conveying gas-liquid two-phase slug flow. Int. J. Mech. Sci. 2018, 141, 168–188. [Google Scholar] [CrossRef]
- Zhong, Q.; Luo, Z. Coupled vibration response of marine riser caused by oil-gas-water three-phase slug flow. Chin. J. Eng. Des. 2019, 26, 95–101. [Google Scholar]
- Yaqub, M.W.; Marappagounder, R.; Rusli, R.; DM, R.P.; Pendyala, R. Review on gas–liquid–liquid three–phase flow patterns, pressure drop, and liquid holdup in pipelines. Chem. Eng. Res. Des. 2020, 159, 505–528. [Google Scholar] [CrossRef]
- Brinkman, H.C. The viscosity of concentrated suspensions and solutions. J. Chem. Phys. 1952, 20, 571. [Google Scholar] [CrossRef]
- Zhang, H.-Q.; Wang, Q.; Sarica, C.; Brill, J.P. Unified model for gas-liquid pipe flow via slug dynamics—Part 1: Model development. J. Energy Resour. Technol. 2003, 125, 266–273. [Google Scholar] [CrossRef]
- Taitel, Y.; Barnea, D.; Dukler, A. Modelling flow pattern transitions for steady upward gas-liquid flow in vertical tubes. AIChE J. 1980, 26, 345–354. [Google Scholar] [CrossRef]
- Nicklin, D. Two-phase bubble flow. Chem. Eng. Sci. 1962, 17, 693–702. [Google Scholar] [CrossRef]
- Bendiksen, K.H. An experimental investigation of the motion of long bubbles in inclined tubes. Int. J. Multiph. Flow 1984, 10, 467–483. [Google Scholar] [CrossRef] [Green Version]
- Gregory, G.; Nicholson, M.; Aziz, K. Correlation of the liquid volume fraction in the slug for horizontal gas-liquid slug flow. Int. J. Multiph. Flow 1978, 4, 33–39. [Google Scholar] [CrossRef]
- Zhang, H.-Q.; Wang, Q.; Sarica, C.; Brill, J.P. Unified model for gas-liquid pipe flow via slug dynamics—Part 2: Model validation. J. Energy Resour. Technol. 2003, 125, 274–283. [Google Scholar] [CrossRef]
- Dai, H.; Wang, L.; Ni, Q. Dynamics of a fluid-conveying pipe composed of two different materials. Int. J. Eng. Sci. 2013, 73, 67–76. [Google Scholar] [CrossRef]
- Monette, C.; Pettigrew, M. Fluidelastic instability of flexible tubes subjected to two-phase internal flow. J. Fluids Struct. 2004, 19, 943–956. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, H.-Q.; Sarica, C.; Pereyra, E. Experimental study of high-viscosity oil/water/gas three-phase flow in horizontal and upward vertical pipes. SPE Prod. Oper. 2013, 28, 306–316. [Google Scholar] [CrossRef]
- Paidoussis, M.P.; Issid, N. Dynamic stability of pipes conveying fluid. J. Sound Vib. 1974, 33, 267–294. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mi, L.; Zhou, Y. Natural Frequency Analysis of Horizontal Piping System Conveying Low Viscosity Oil–Gas–Water Slug Flow. Processes 2022, 10, 992. https://doi.org/10.3390/pr10050992
Mi L, Zhou Y. Natural Frequency Analysis of Horizontal Piping System Conveying Low Viscosity Oil–Gas–Water Slug Flow. Processes. 2022; 10(5):992. https://doi.org/10.3390/pr10050992
Chicago/Turabian StyleMi, Liedong, and Yunlong Zhou. 2022. "Natural Frequency Analysis of Horizontal Piping System Conveying Low Viscosity Oil–Gas–Water Slug Flow" Processes 10, no. 5: 992. https://doi.org/10.3390/pr10050992
APA StyleMi, L., & Zhou, Y. (2022). Natural Frequency Analysis of Horizontal Piping System Conveying Low Viscosity Oil–Gas–Water Slug Flow. Processes, 10(5), 992. https://doi.org/10.3390/pr10050992