1. Introduction
With the rapid development of industrial technology, increasing attention has been paid to certain safety and reliability problems, prompting further research on fault detection. Among the research of fault detection problems, model-based methods have been intensively studied, and considerable results have been reported during the past few decades [
1,
2,
3,
4,
5,
6,
7,
8,
9]. To mention a few, by transforming the residual generator design problem into an optimization problem, an optimal periodic fault detection approach is obtained for linear discrete-time periodic systems in the light of robustness and sensitivity [
10]. The definitions of finite horizon
and
fault detection performance are first established for linear discrete time-varying systems, based on which the fault detection issue is dealt with by designing some observer gains [
11]. The sensor stuck faults are considered for a class of stochastic systems, and a fault detection method is proposed in the stochastic framework to guarantee the effectiveness for arbitrary small sensor stuck faults [
12]. Considering the linear system with elliptical uncertainties, a general parametrization is employed for less conservativeness and then a fault detection filter is designed to maximize the sensitivity of fault detection with a certain disturbance attenuation demand [
13]. To make a balance between the sensitivity and robustness, a mixed
performance index is taken into account, and sufficient criteria are presented to achieve the fault detection observer design for a class of piecewise linear systems with weighted
performance [
14]. On the basis of linear system study, the model-based fault detection schemes have been extended to the issues of nonlinear fields. For example, the observer-based fault detection design is achieved for general nonlinear systems by investigating the analysis and integrated design scheme [
15]. By approximating a nonlinear system as a T-S fuzzy model, the observer-based fault detection for nonlinear systems with disturbances is investigated based on the
stability theory [
16]. Via the logic-dynamic method, the fault detection issue for dynamic systems with non-differentiable nonlinearities is solved with the aid of the linear technique [
17]. By considering the stochastic property of noises and process disturbance, a distributed fault detection and isolation scheme is proposed in a Plug-and-Plug scenario [
18]. A systematic study is carried out for the fault detection of nonlinear systems by designing linear residual generators, which is further utilized in some practical applications [
19]. The model-based method plays an important role in the field of fault detection, while it will unavoidably incur a high cost in acquiring the accurate model information. Therefore, the data-driven fault detection as an alternative method has drawn increasing attention in both academia and industry.
Recently, data-driven fault detection issues have been investigated thoroughly, due to their advantages in saving the costly modeling process and making great use of process data information compared with the model-based method. Over the last few years, many studies have been done for the data-driven fault detection issues of industrial process. For instance, the observer-based fault detection is constructed by exploiting the data-driven image and kernel representations [
20]. By using the residual generators derived from the process data, a data-driven fault detection approach is devised for wind turbines with measurement noises, unknown disturbances, and nonlinearities [
21]. Data-driven fault detection and isolation filters are constructed for sensor and actuator faults by taking advantages of available system data, and meanwhile an estimation approach is established and extended to an offline tuning strategy to compensate the estimation errors under the uncertainties and Markov parameters [
22]. In the data-driven framework, a fault detection scheme is proposed to detect small sensor faults and a fault isolation algorithm is developed to distinguish different faults [
23]. By identifying a data-driven SKR with the projecting technique, a robust residual generation is derived and, accordingly, the robust data-driven fault detection strategy is obtained for rolling mill processes with unknown eccentricity [
24]. The quantitative diagnosability analysis is addressed for dynamic systems by virtue of the data-driven evaluation [
25]. By employing a radically data-driven strategy, the fault detection and diagnosis are developed for wind turbines to enhance the reliability [
26]. A q-step residual design approach is constructed for the data-driven fault detection of linear systems to ensure the stability and performance demand [
27]. The distributed data-driven optimal fault detection is studied in large-scale systems by utilizing the average consensus algorithm [
28]. By proposing a prediction model on the output of nonlinear dynamic systems, a detection method is devised according to the comparison between the measurement output and the prediction to determine a residual, and further an isolation scheme is constructed to clarify the fault location for the underlying system [
29]. Considering the fact that incipient faults are not easy to discover in electrical drives because of their inapparent symptoms, a data-driven fault detection and diagnosis method is presented by applying the principal component analysis approach which improves the accuracy of fault detection for electrical drives without available system parameters or models [
30].
Note that the practical industrial process inevitably suffers the changes of process environment and operation conditions. In this case, the predesigned residual generators may not provide satisfactory fault detection performance. To guarantee the ability and efficiency of the data-driven fault detection without sacrificing the industrial cost, the online configuration or updating becomes an important technology in solving such issues. Up to now, some methods use online configuration and updating of data-driven fault detection including adaptive algorithms, iterative optimization, etc. The adaptive residual generator combined with the data-driven scheme is designed and implemented to recursively estimate the corresponding parameters and improve the robustness against the undesired changes for discrete linear systems [
31]. By virtue of a data-driven subspace-based predictor, an adaptive updating strategy is proposed for the fault detection filter of solar power generation systems with uncertainties [
32]. Via adopting an autoregressive exogenous model to represent the dynamic process, an adaptive data-driven method is developed for fault detection of dynamic process with process drift [
33]. The adaptive algorithm provides an effective way for the online configuration of data-driven residual generators, while each new measurement is utilized for the parameter estimation, and the parameter updating in the adaptive configuration happens at every sampling instant. Moreover, the configured system matrix of the adaptive method may be sensitive to small changes in the parameters. Compared with the adaptive configuration, the residual generator parameters based on the iterative optimization method remain unchanged between two iterations, which would greatly reduce the iteration number and meanwhile guarantee the fault detection performance [
34,
35]. However, the existing results about the online optimization configuration for the observer-based residual generators are quite limited, which motivates the current study.
Based on the observations above, this paper is aimed to investigate the real-time configuration for fault detection systems via the gradient optimization method. Considering the unavoidable changes of the industrial process and operating environment, it is necessary to establish a real-time configuration method to properly configure the residual generator parameters to guarantee fault detection ability. To achieve the real-time configuration, a gradient-based iterative optimization strategy is proposed by minimizing the K-gap metric between the residual generator and the current system. In this way, the residual generator can be updated from the available input/output (I/O) data without the identification of system matrices. A novel optimization algorithm for the real-time configuration of residual generators is developed, by which the validity of the fault detection process is guaranteed. Furthermore, a three-tank system plant is taken into account to illustrate the usefulness and advantages of the proposed approach, which can be seen as the prototype for many industrial processes, such as chemical process industries.
The structure of this paper is organized as below. In
Section 2, the system descriptions and necessary preliminaries are provided.
Section 3 presents the gradient optimization to achieve the online configuration for fault detection systems. In
Section 4, a simulation example is used to demonstrate the effectiveness of the obtained method. Finally, the conclusions of this work are drawn in
Section 5.
Notation 1. Throughout this paper, the notations are generally standard. and , respectively, denote the n-dimensional Euclidean space and the set of all real matrices. is the set of all stable transfer functions and is the subspace of all signals with bounded energy equal to 0 for any . defines the set of all real-rational transfer functions of stable systems. and stand for the -norm and the -norm, respectively. indicates the vectorization of matrix A. and represent the maximum singular value and the maximum eigenvalue of matrix A, respectively. denotes the pseudoinverse of matrix A. defines a diagonal matrix.
3. Main Results
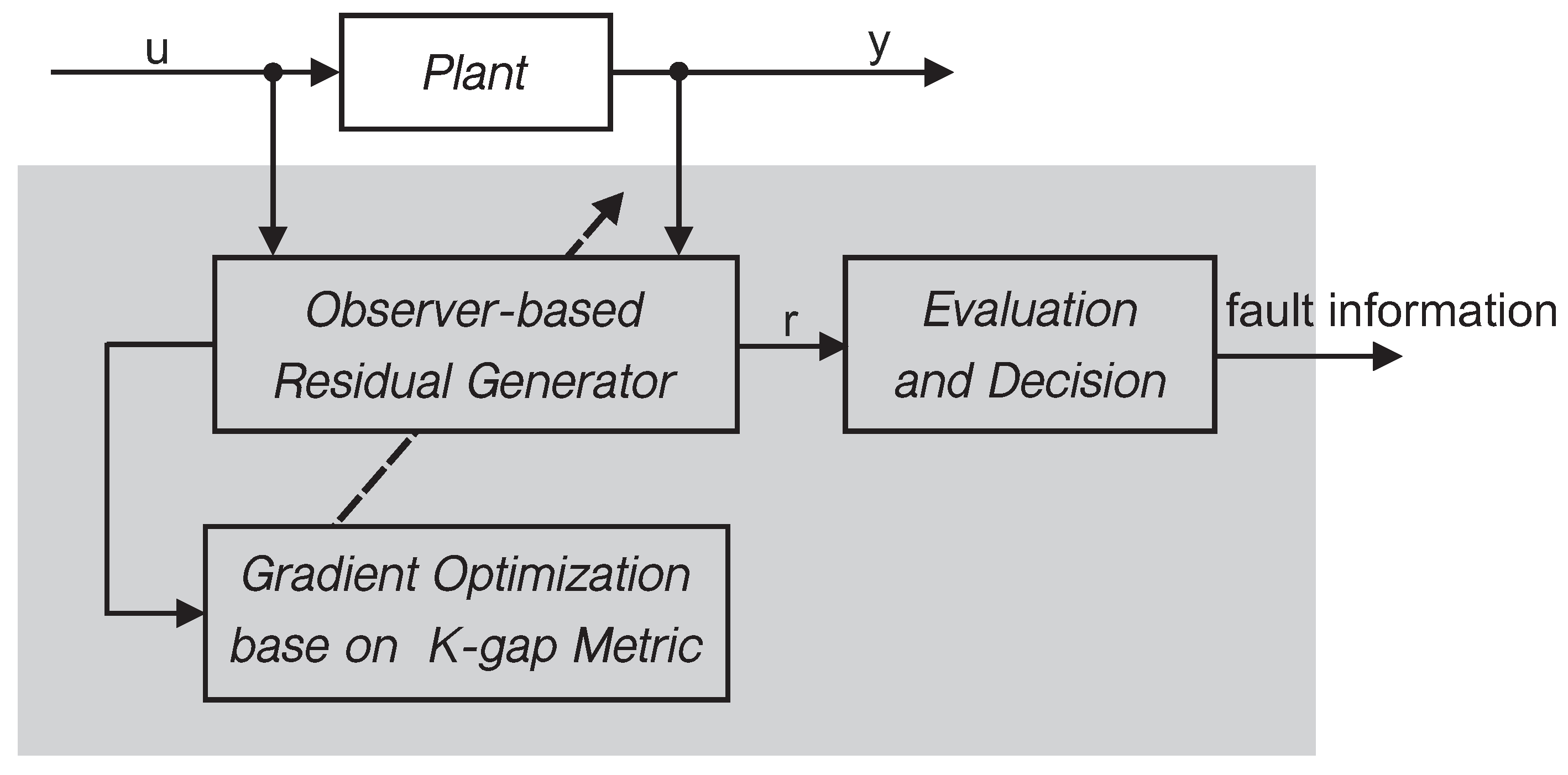
Considering that practical circumstance and industrial environment may change, the fault detection by the offline designed residual generator cannot satisfy the complicated industrial demand. In this section, a novel real-time configuration scheme for residual generators is proposed, which is essentially an optimization algorithm based on the K-gap metric. To be specific, an observer-based residual generator is constructed and the gradient optimization algorithm is used to update its parameters. Thus, the real-time configuration is achieved for the observer-based residual generators, the framework of which is displayed in
Figure 1 for clarification.
3.1. The Observer-Based General Generator
For the discrete-time LTI system (1), a full-order state observer is constructed with the minimal state-space representation as
where
indicates the state of the full-order observer and
stands for the residual vector.
are observer matrices with proper dimensions.
For observer (9) and (10), a similarity transformation is performed by
, which yields
where
. According to the authors of [
40], the controllability Gramian matrix of systems (11) and (12) is equivalent to the identity matrix, i.e.,
which gives rise to a column-orthogonal matrix
. Consequently, there exists an invertible matrix
such that
Referring to the literature [
41], the parameterization based on the input normal form can be described by
in which
and its entries take values in the range
. By introducing the following form for each parameter
the matrices
are represented as
As the parameterization of the input normal form is on the basis of the asymptotic stability, no additional restriction on the parameter space is needed, which is a significant advantage of this transformation.
Then, the procedure to obtain the SKR corresponding to the observer (11) is given as below. It is obvious from Formula (12) that
Subsequently,
which implies
Then, it is easy to obtain that
where
Then, the following equation is obtained:
As
, according to Definition 3, the SKR corresponding to the state observer can be obtained by the equation
with removing the front finite rows to eliminate the influence of past data. By applying the singular value decomposition to
, it holds that
and thus, the normalized SKR is
3.2. Online Gradient Optimization
Based on the above observer-based residual generator, this subsection will establish an gradient optimization method for the real-time configuration by taking advantage of the K-gap metric between the observer and system plant.
Define
and denote
(
) as the
i-th term of
.
The optimization problem is described by
where
are, respectively, the SKRs of the system (1) and the observer (11), and
is the set in which the entries of any vector belong to
. To achieve the minimization of cost function
J, the Taylor expansion of cost function
J at the
j-th iteration is considered
where
and
denote the gradient and the Hessian matrix of cost function
J, respectively.
stands for the infinitesimal of order higher than 3. Regardless of the high-order infinitesimal, a necessary condition to minimize the function
is to command
Rewriting the expression (17) gives the iteration procedure of updating the parameter
as
which is the Gauss–Newton iteration widely used in the literature. However, this method requires the invertibility of
and may lead to a heavy computational burden. To improve its applicability in numerical computation, an iteration procedure known as the steepest-descent algorithm is introduced
where
is a diagonal matrix meaning the step length of the
j-th iteration.
Clearly, the key question of the optimization is to calculate the gradient .
It is obtained from Lemma 2 that
Denote
as the eigenvector corresponding to the maximum eigenvalue of matrix
and focus on the partial derivative on the
i-th variable, i.e.,
Making use of the result of singular value decomposition in (16) gives
where
and
means the row number of matrix
. Therefore,
in which
Notice that
where
. As a result,
is the eigenvector corresponding to the
i-th eigenvalue of matrix
. For any
,
It can be easily obtained that
Substituting the Formula (15) into the partial derivative leads to
As may be one element of any vector of , the deduction will be divided into four cases in the following.
First, when the parameter
is one element of vector
,
where
and
Second, when the parameter
is one element of vector
, assume
, where
corresponds to the
p-th row and the
q-th column of matrix
,
with
Third, when the parameter
is one element of vector
, assume
, where
corresponds to the
p-th row and the
q-th column of matrix
,
with
Fourth, when the parameter
is one element of vector
, assume
, where
corresponds to the
p-th row and the
q-th column of matrix
,
with
Up to now, the optimization problem is solved and the parameter optimization is derived by the above deduction. To summarize, this study aims to achieve the online configuration of an observer-based residual generator for fault detection systems. To achieve this, the observer is first transformed into the input normal form, which guarantees the asymptotic stability. Based on the input normal form, the residual generator is established, and the purpose is to online configure its parameters to cope with the operation condition changes or uncertainties of the system. Then, the optimization configuration strategy is taken into account and the optimization problem is proposed by utilizing the K-gap metric concept. By employing the gradient descent method, the parameter configuration is finally obtained for the online configuration realization.
Remark 1. Note that the optimization problem of this paper is established based on the K-gap metric concept. The purpose is to minimize the K-gap metric between the observer and system plant, which characterizes the distance between two kernel subspaces. Referring to the work in [37], a definition of cluster is described as below. For , the setis called cluster with the cluster center and cluster radius . From this point of view, by minimizing the K-gap metric , the obtained falls into the cluster with the cluster center and a certain cluster radius. A smaller cluster radius contributes to a more similar level of to . Therefore, the residual generator based on the optimized can guarantee the reliability and efficiency of the fault detection system. 3.3. Online Configuration Realization of Fault Detection
This subsection will present an online algorithm to achieve the fault detection goal by employing the newly proposed gradient configuration scheme. The detailed procedure of online configuring the observer-based residual generator is described in Algorithm 1 as follows.
| Algorithm 1 Online Configuration of Observer-Based Residual Generator |
| Step 1: | Collect the I/O data at each k and select an iteration interval W |
| Step 2: | Execute Step 3–6 for the j-th iteration every W |
| Step 3: | According to Definition 3, compute the SKR and its normalized result |
| Step 4: | Compute the SKR and its normalized result corresponding to the observer |
| | by (15) and (16) |
| Step 5: | Apply Lemma 2 to obtain the K-gap metric between and |
| Step 6: | Given a scalar , if , compute the gradient and update the parameters |
| | of residual generator according to (19), increase j by 1 and return Step 2, otherwise |
| | the configuration ends |
To achieve the fault detection, the evaluation function is set to be
with the threshold
chosen as below,
where
d and
represent the disturbance and model uncertainties, respectively. Based on the online residual generator obtained by Algorithm 1, calculate the evaluation function
. The decision logic is described by
4. Simulation Experiment
In this section, a simulation experiment is carried out on a three-tank system plant to show the effectiveness and advantages of the proposed real-time configuration scheme.
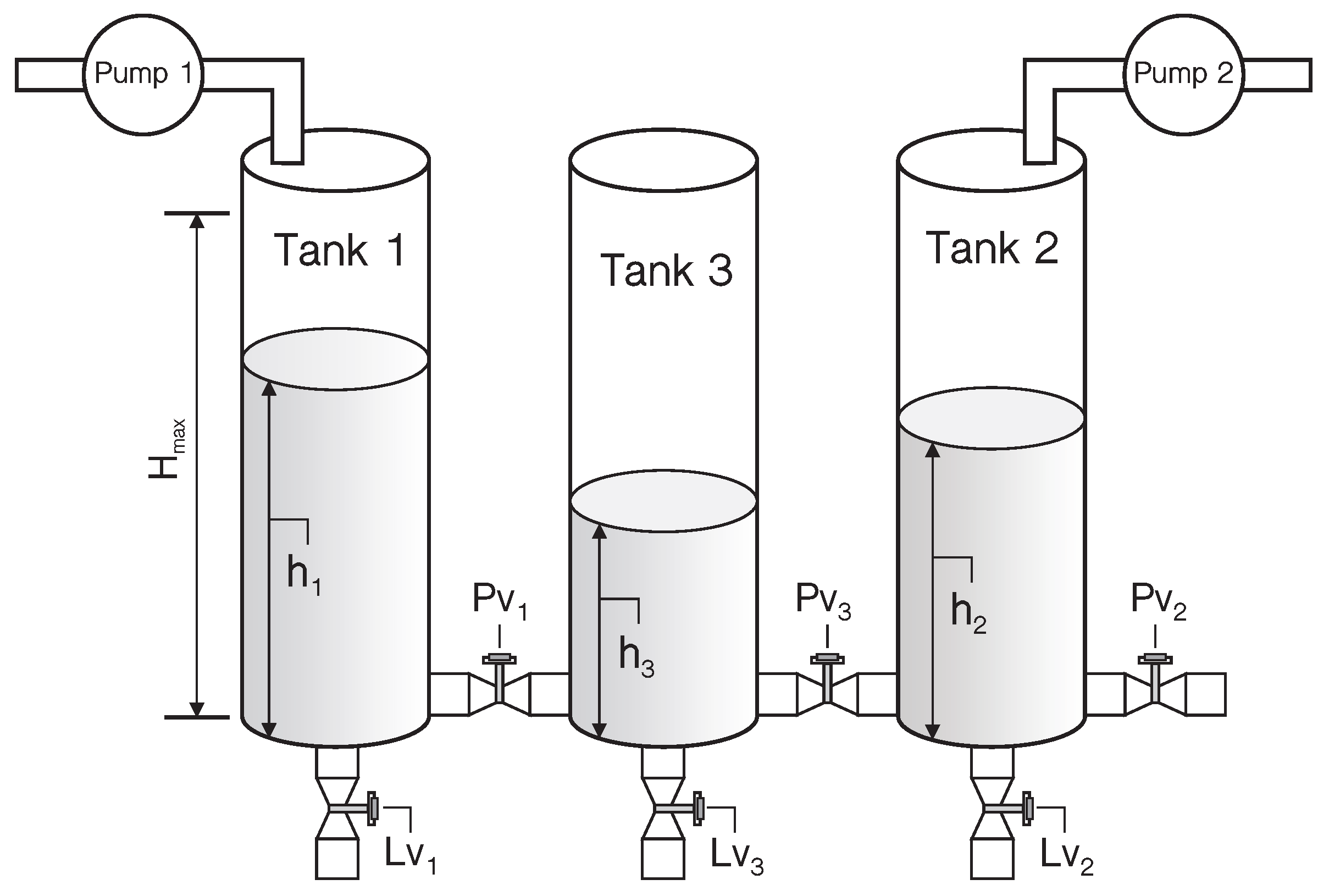
Figure 2 shows the schematic diagram of the three-tank system, which is composed of three water tanks and some connecting pipes. In
Figure 2, h
, h
, and h
refer to the water levels of the three tanks, which are measurable through sensors and deemed as the output signals. Q
and Q
stand for the incoming mass flow rates of Pump 1 and Pump 2 and are used as the input signals. Besides, PV
, PV
, PV
, LV
, LV
, LV
are the adjustable ball valves to administrate the opening and closing of these pipes.
The system plant can be represented by the nonlinear dynamics
in which
cm
and
cm
denote the cross section area of the tanks and pipes, respectively, and
successively indicate the coefficients of flow for the three pipes. In addition, the maximum height of the tanks is chosen as
cm, and the maximum flow rates of pumps 1 and 2 are set to be
cm
/s. For certain operation points, the nonlinear representation (21) can be reformulated into the LTI system (1) by utilizing the linearization technique.
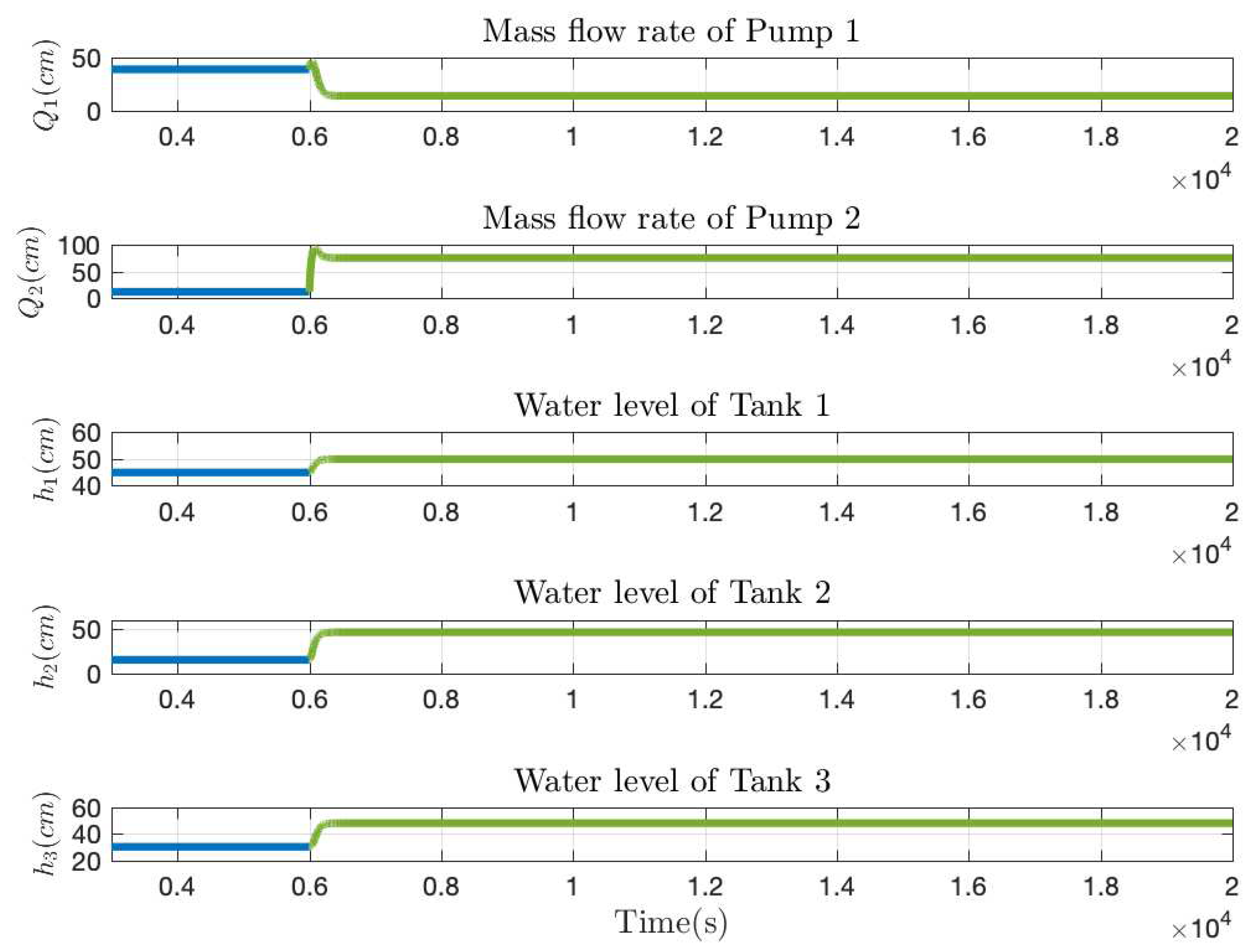
In this simulation, the operating time is set to be 25,000 s and the sampling period is chosen as 1s. At first, the operation point of the three-tank system is considered to be h
cm, h
cm, and h
cm, for which a residual generator is predesigned and applied in the fault detection process. Due to the demand of practical industry, it is supposed that the operation point changes to h
cm, h
cm and h
cm at 6000 s. The process data are collected and displayed in
Figure 3.
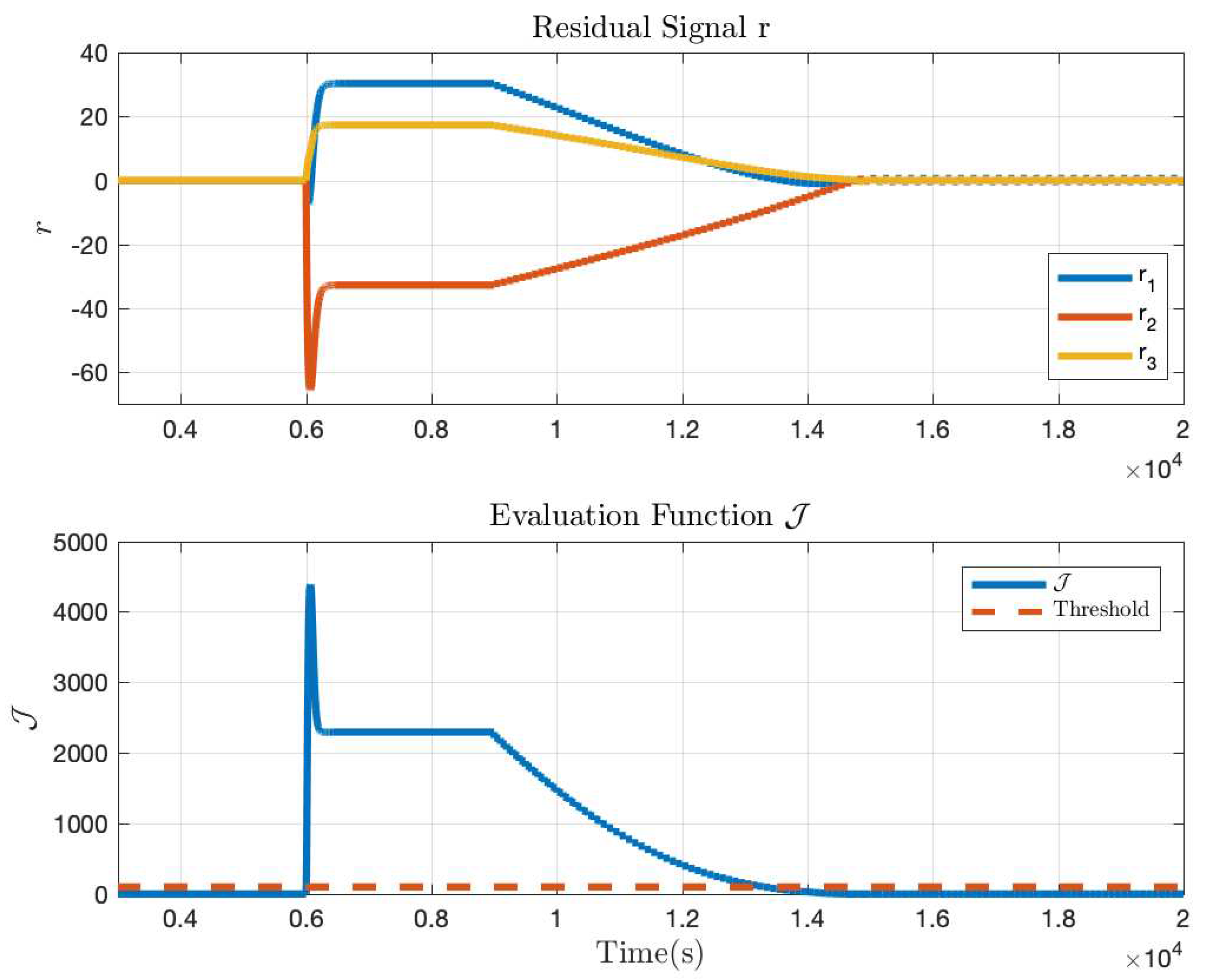
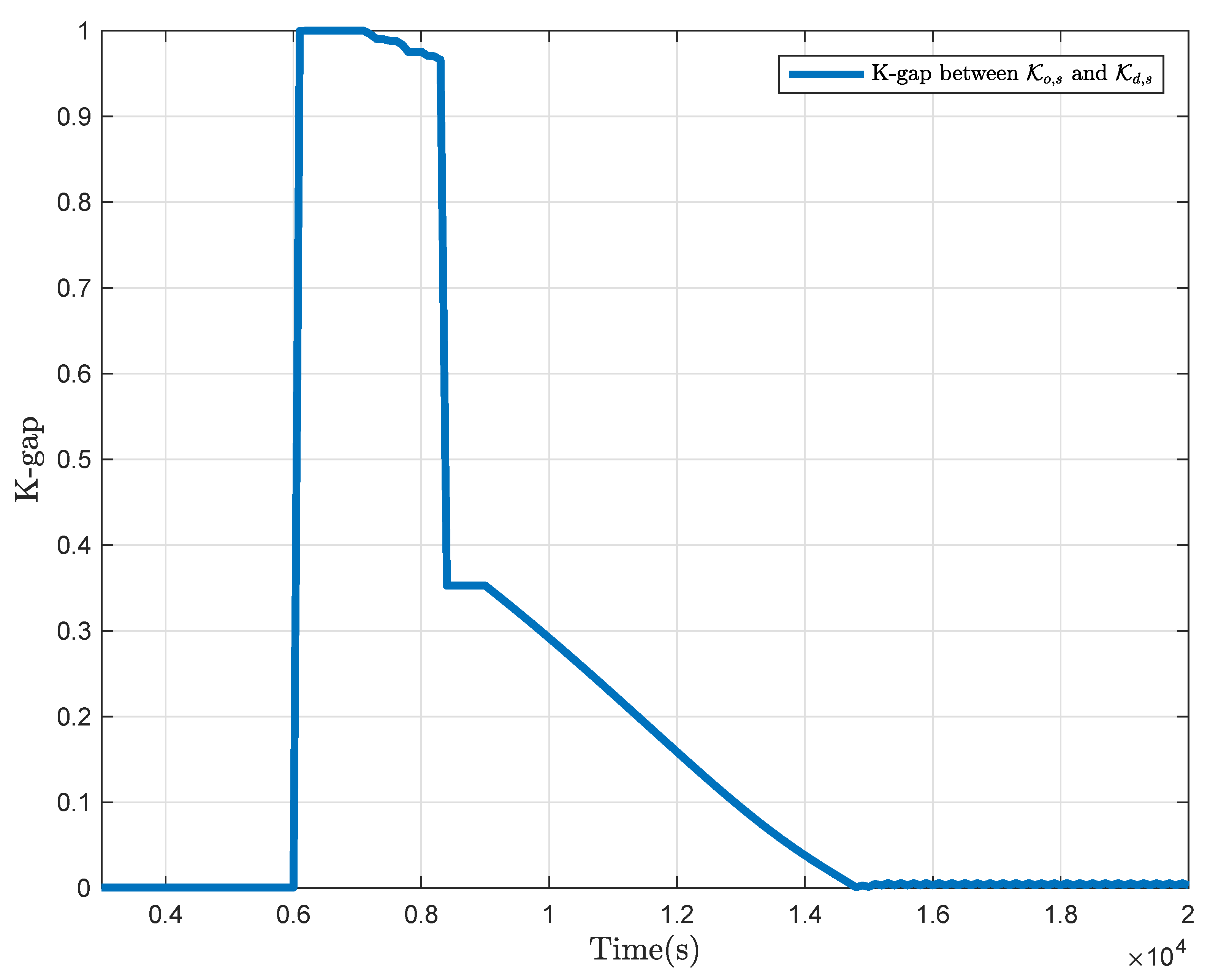
Figure 4 displays the evolution curves of residual signals and evaluation function and
Figure 5 exhibits the K-gap metric between system plant and observer. Before the change of the operation point at 6000 s, the evaluation function value is lower than the threshold and the K-gap metric value is
, which means the kernel subspaces of system plant and observer are sufficiently close and thus the predesigned residual generator is proper. From 6000 s, the value of evaluation function increases and obviously exceeds the threshold, which causes a false alarm under the circumstance of no fault. Meanwhile, the K-gap metric between system plant and observer becomes enormous. Clearly, the predesigned residual generator is no more applicable for the system with a changed operation point. To handle this problem and demonstrate the validity of the proposed real-time configuration method, the real-time configuration algorithm, i.e., Algorithm 1 is implemented at 9000 s. It can be observed from
Figure 4 and
Figure 5 that from 9000 s, the K-gap metric value begins to decline as the real-time configuration implementation, and the values of residual signal and evaluation function, begin to decrease and gradually converge. At ~14,700 s, the K-gap metric settles at ~
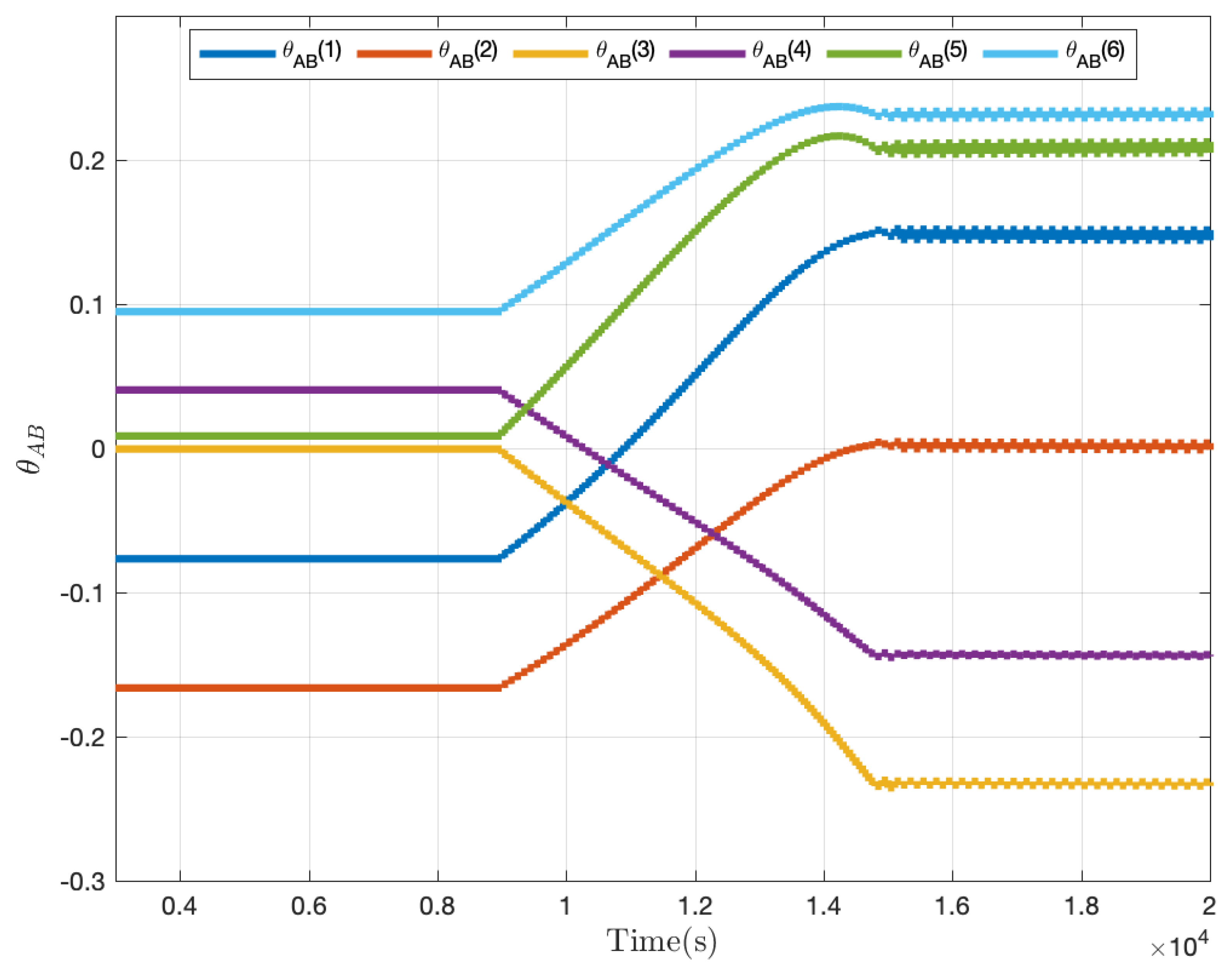
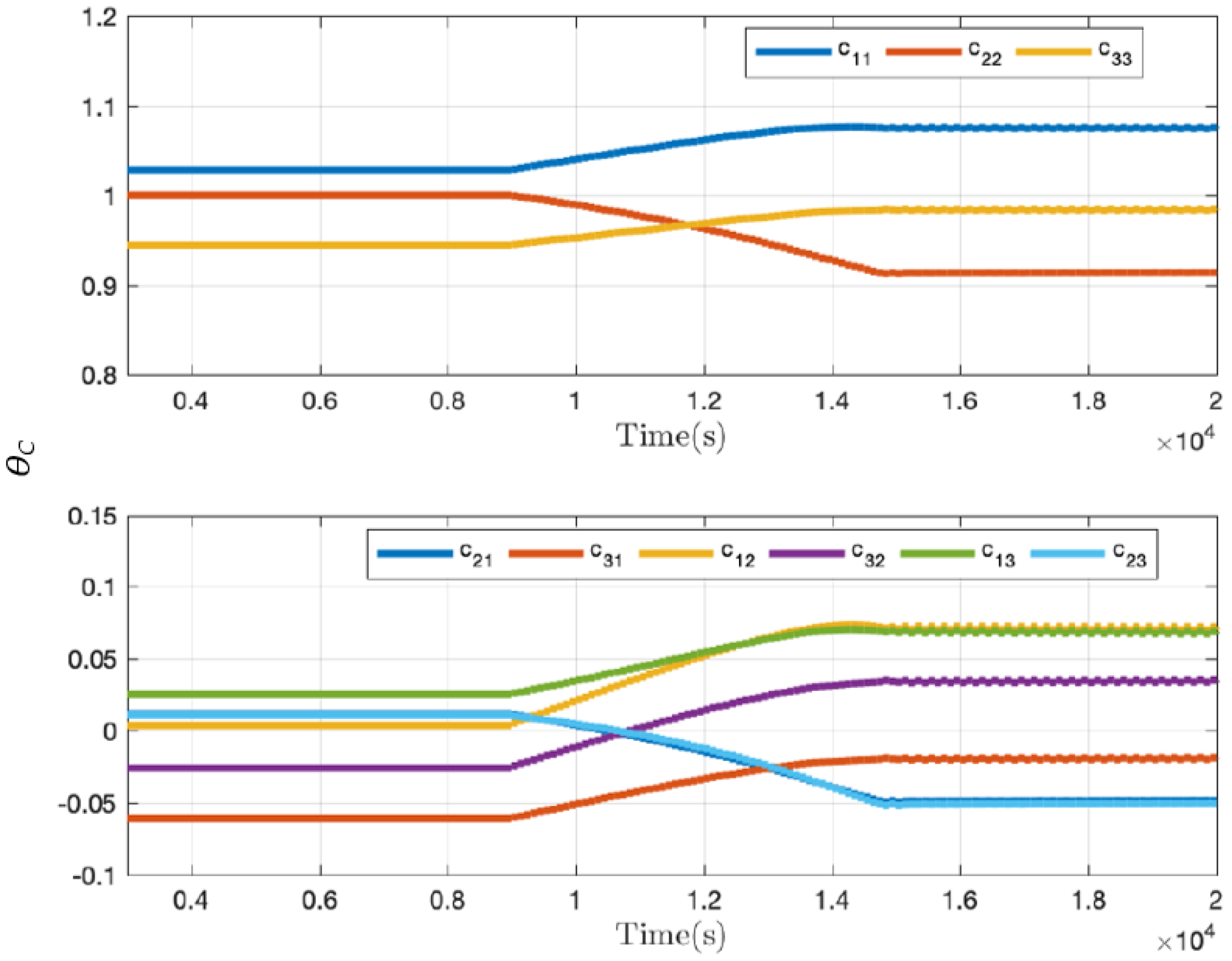
and the kernel subspace of observer is adequately approximate to the kernel subspace of system plant. In addition, the value of evaluation function becomes less than the threshold and the false alarm disappears, which reflects that the real-time optimized residual generator is effective for the current operation point. Therefore, the optimization goal is realized and the real-time configuration of the residual generator is achieved for the system. In addition, the optimized parameters of
are, respectively, given in
Figure 6 and
Figure 7 to show the parameter configuration process.
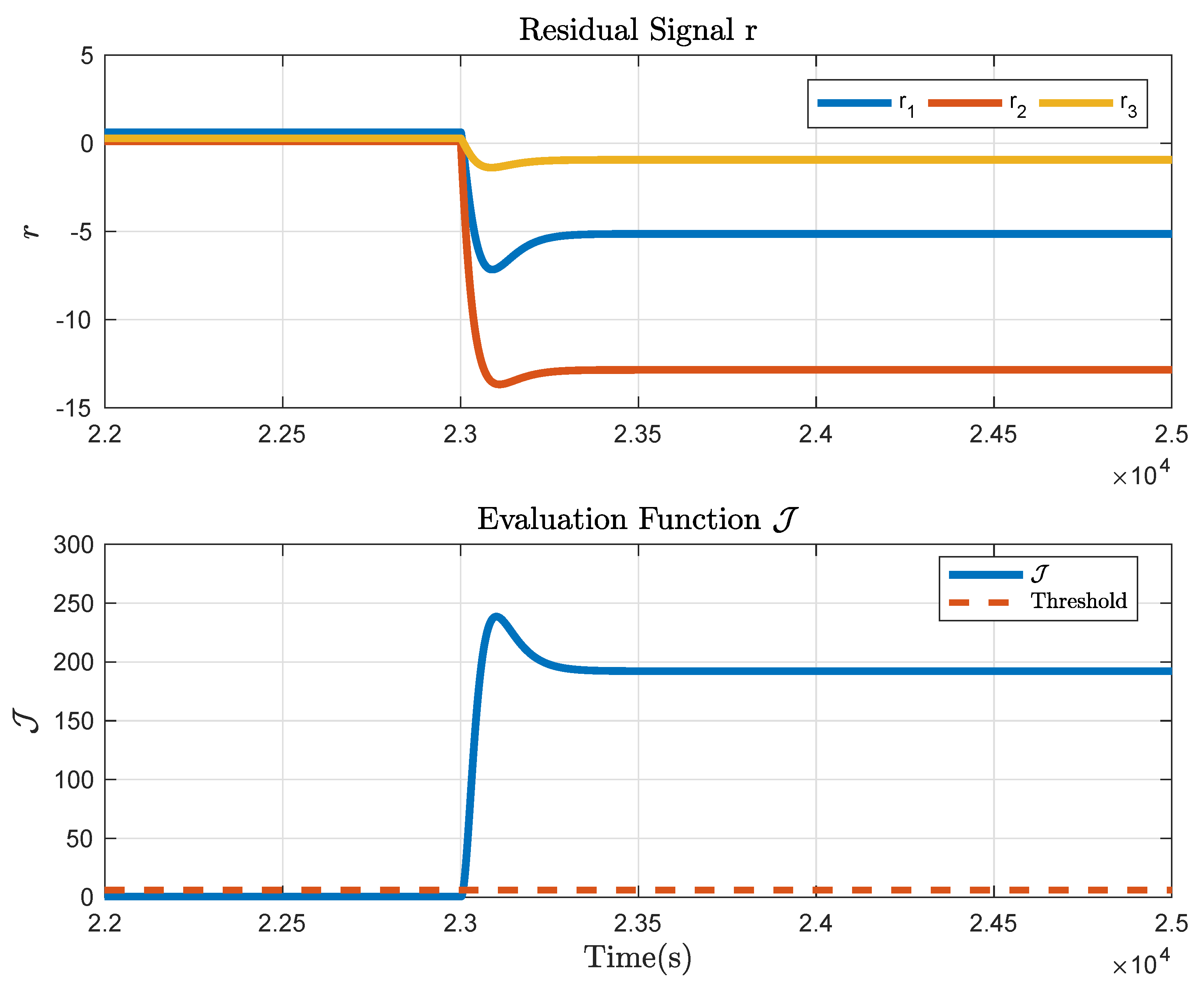
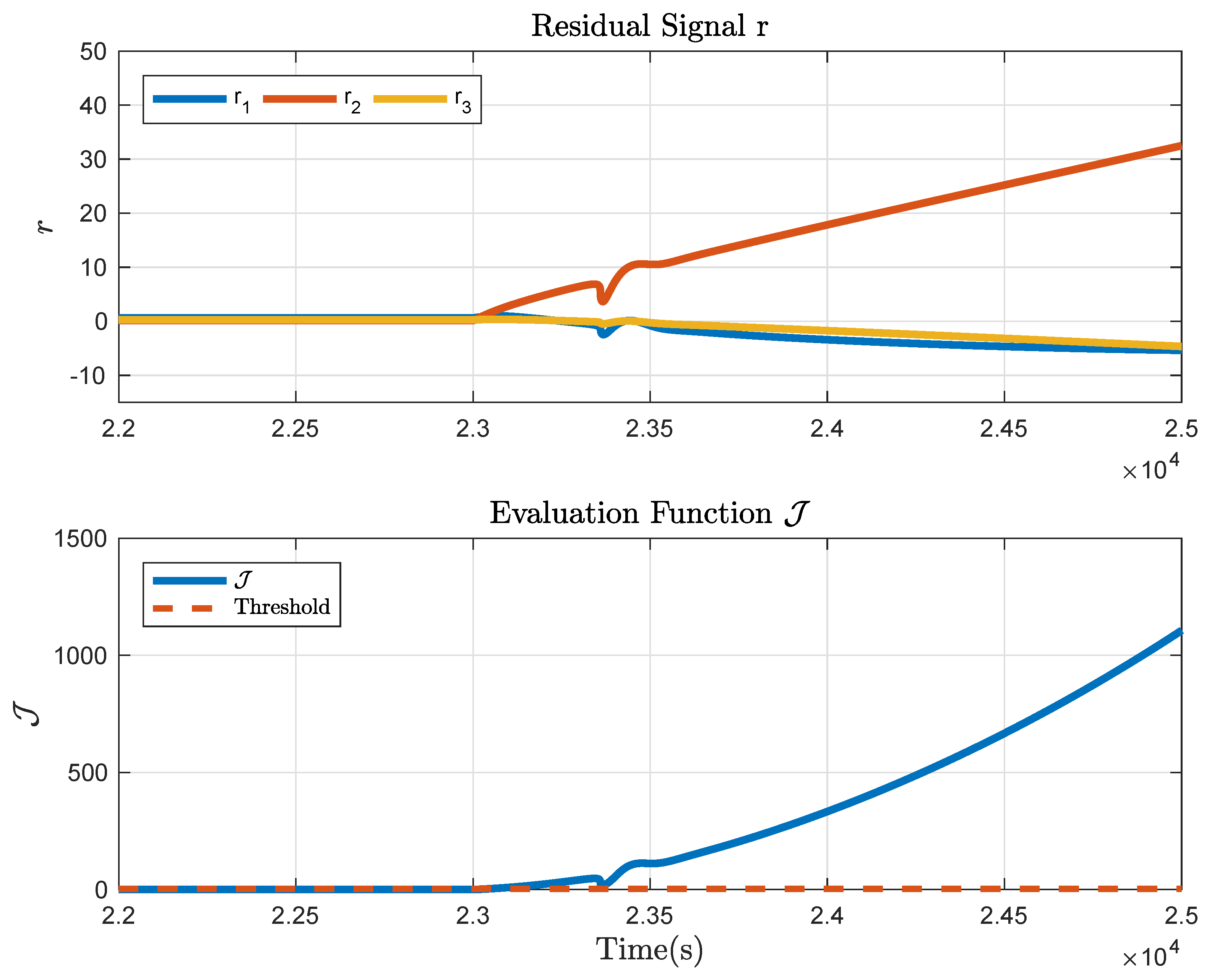
Now, the online configured residual generator is applied to the fault detection implementation to verify its usefulness. Here, two types of fault will be considered and assumed to happen at 23,000 s, respectively. First, consider that a leakage fault happens in the tank 2 with a 20% leakage level at 23,000 s.
Figure 8 shows the fault detection result by the online configured residual generator. It can be seen from the figure that the value of the evaluation function exceeds the threshold at 23,005 s, which means that the leakage fault is detected. Then, the usefulness of the fault detection based on the online configuration scheme is illustrated. Moreover, another type of fault, i.e., a drift fault with slope 0.01 occurring in the sensor of water level of tank 2, is considered at 23,000 s.
Figure 9 shows the corresponding fault detection result, from which one can see that the drift fault is detected by the proposed optimization configuration algorithm at 23,042 s. According to the above fault detection results, it is clear that the optimization configuration method of this paper can detect the fault accurately and timely. As a consequence, the real-time configuration method proposed in this paper can effectively deal with the system under the influence of operation point changes or uncertainties, and the effectiveness of the method in fault detection implementation is demonstrated.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}