


Virtual Voltage Vector-Based Model Predictive Current Control for Five-Phase Induction Motor

Abstract
:1. Introduction
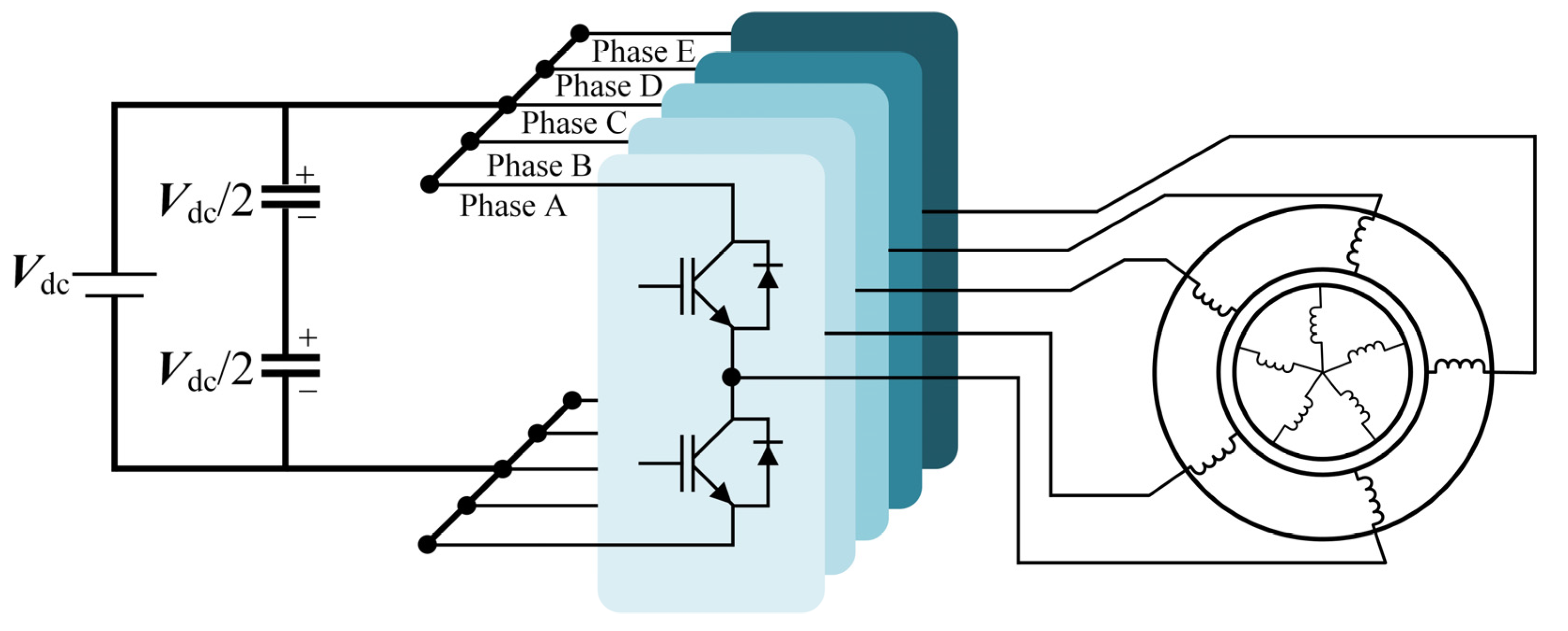
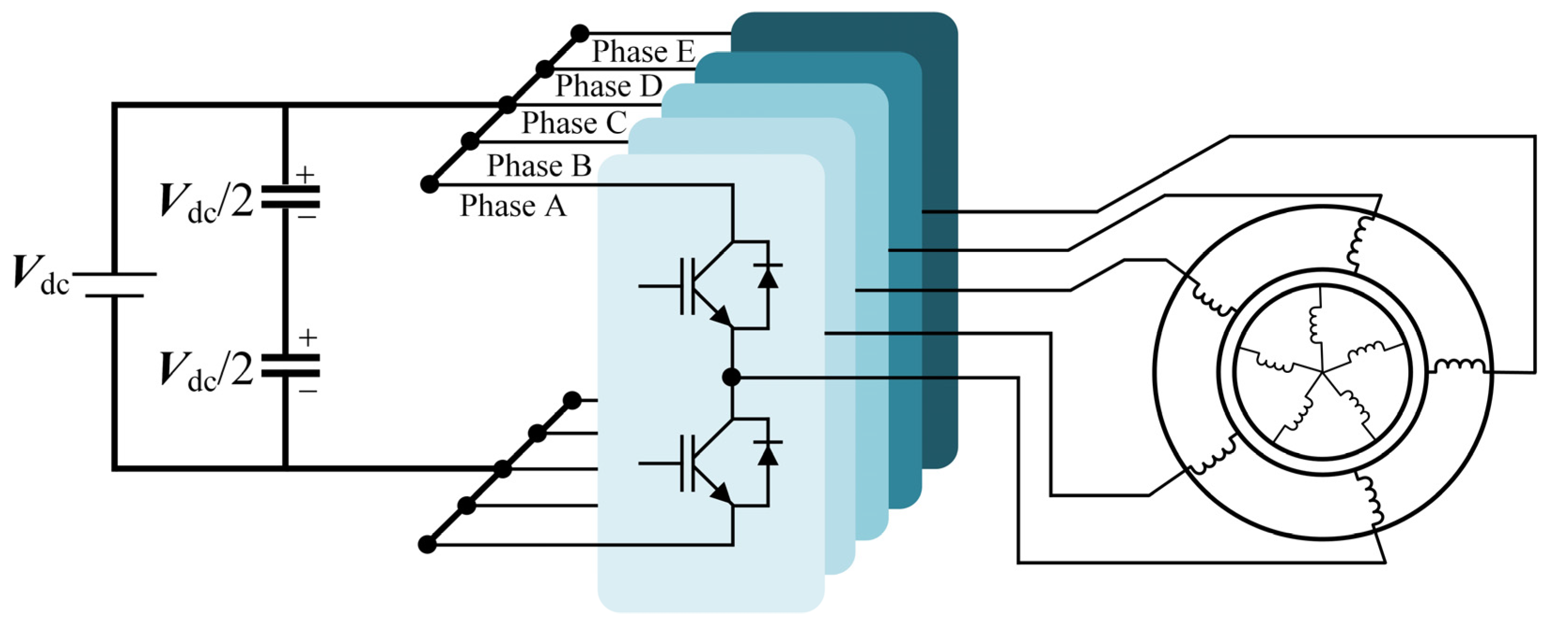
2. Five-Phase Induction Motor Drive
2.1. Five-Phase Induction Motor Model
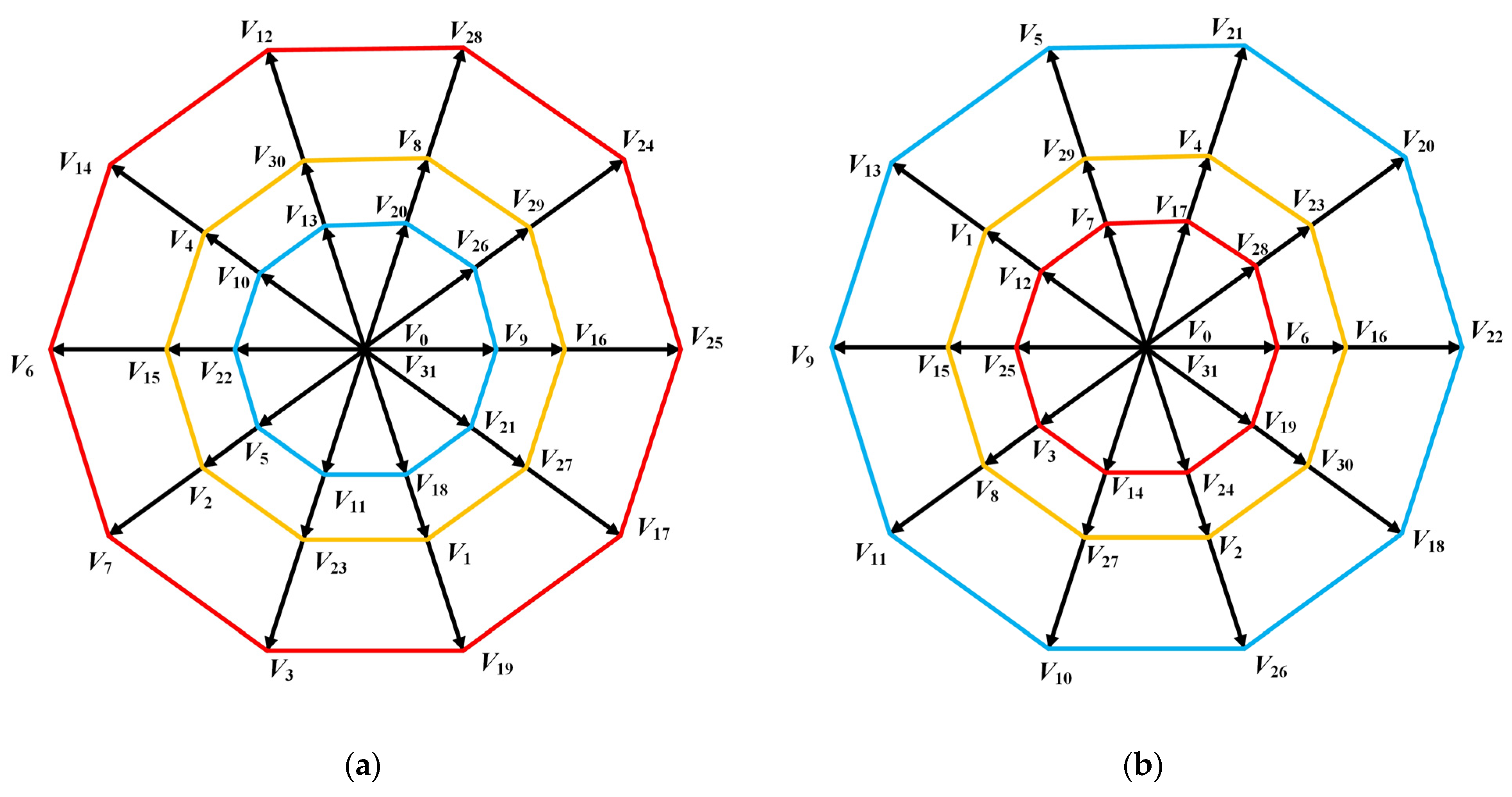
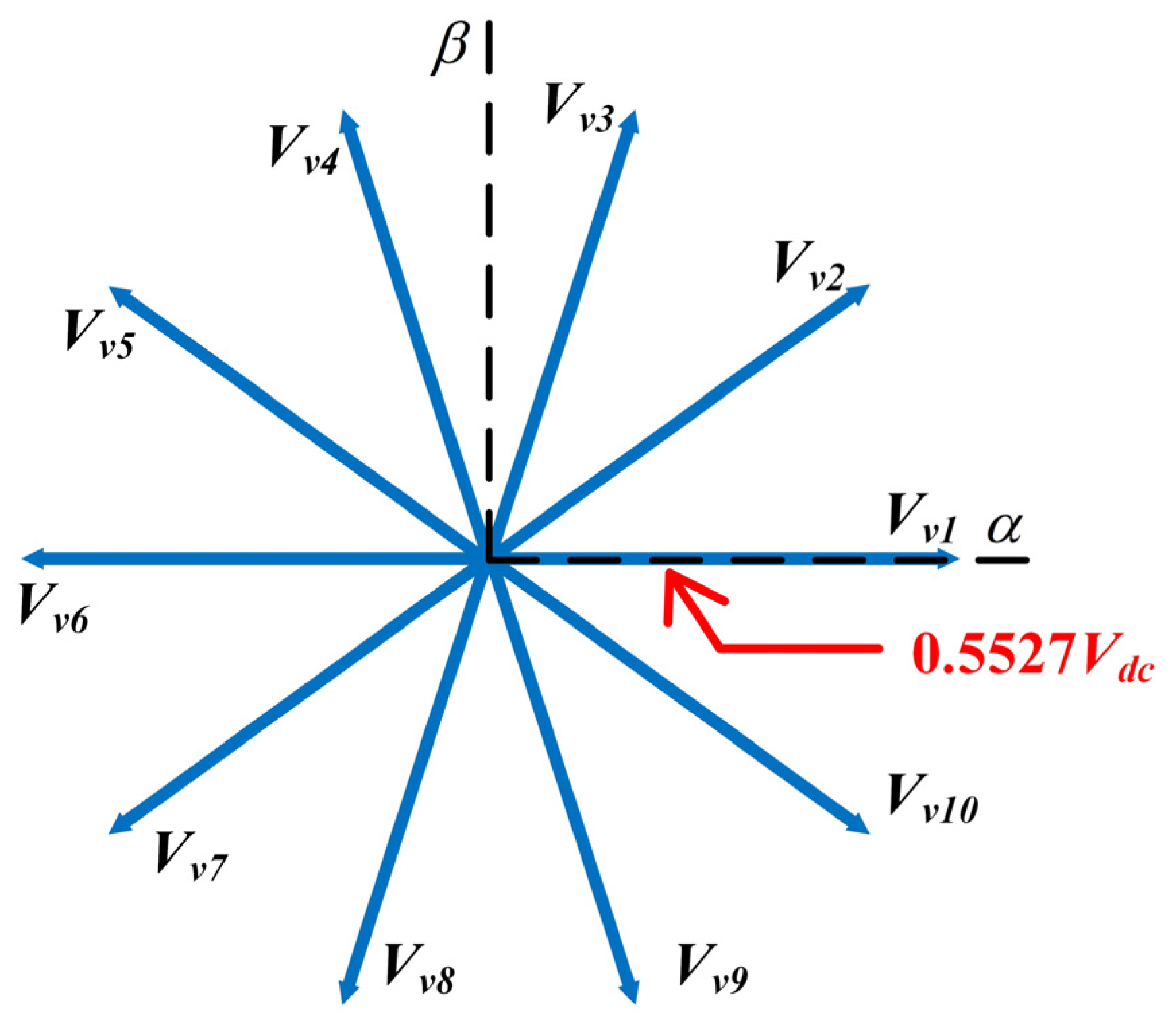
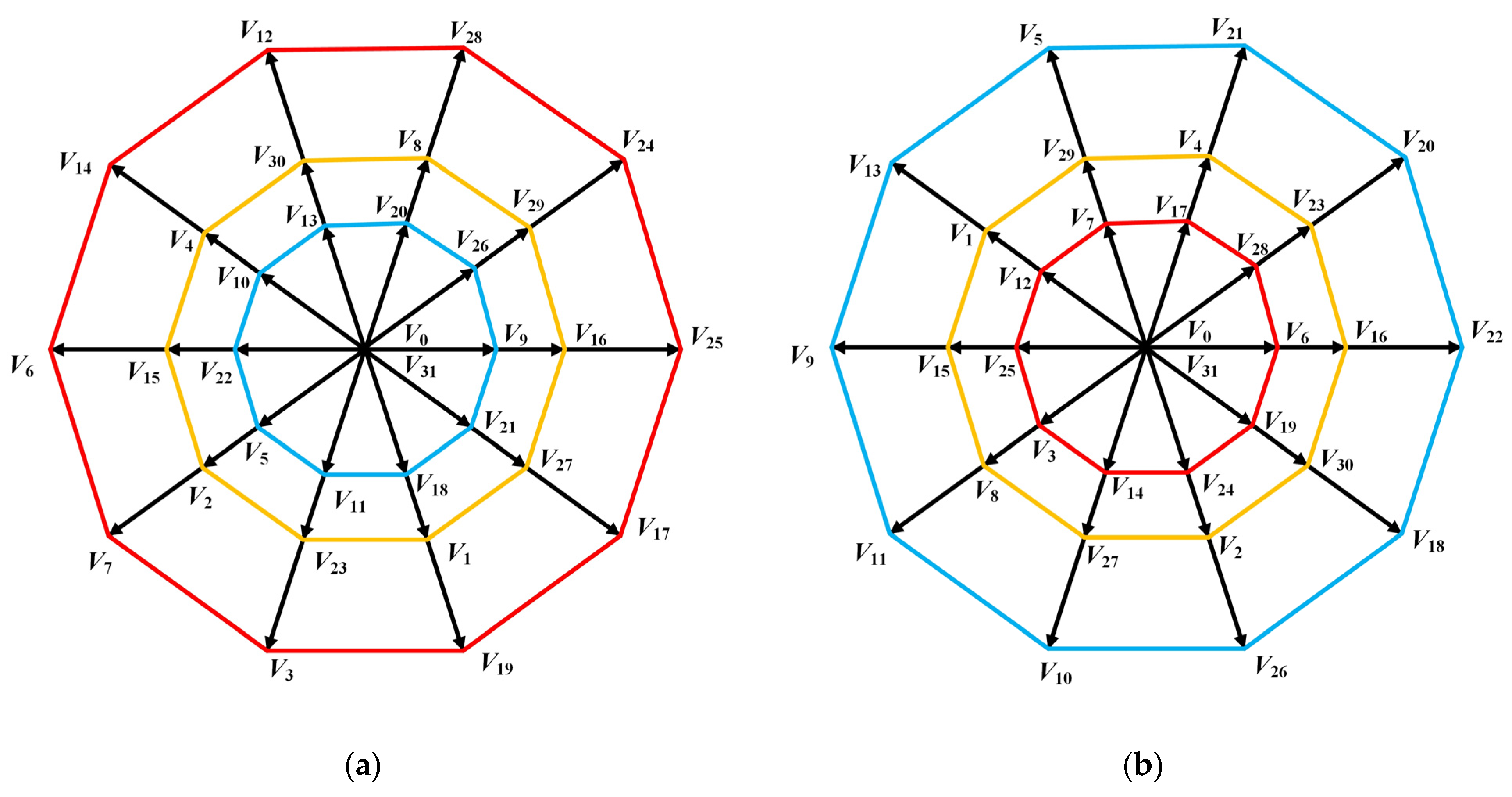
2.2. Voltage Vectors Distribution
3. Traditional FCS-MPCC Scheme
3.1. Prediction Model of Induction Motor
3.2. Cost Function
3.3. Delay Compensation
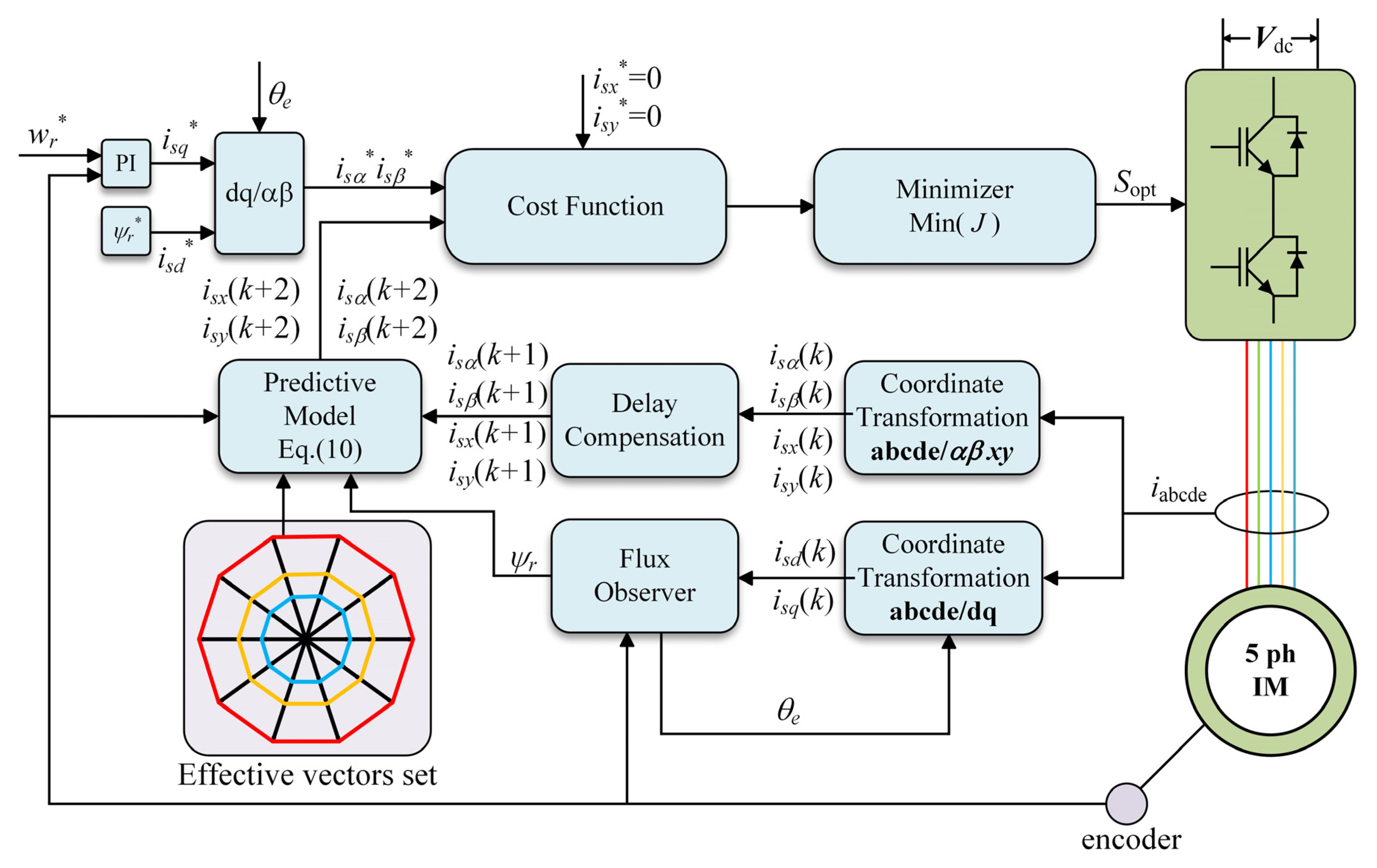
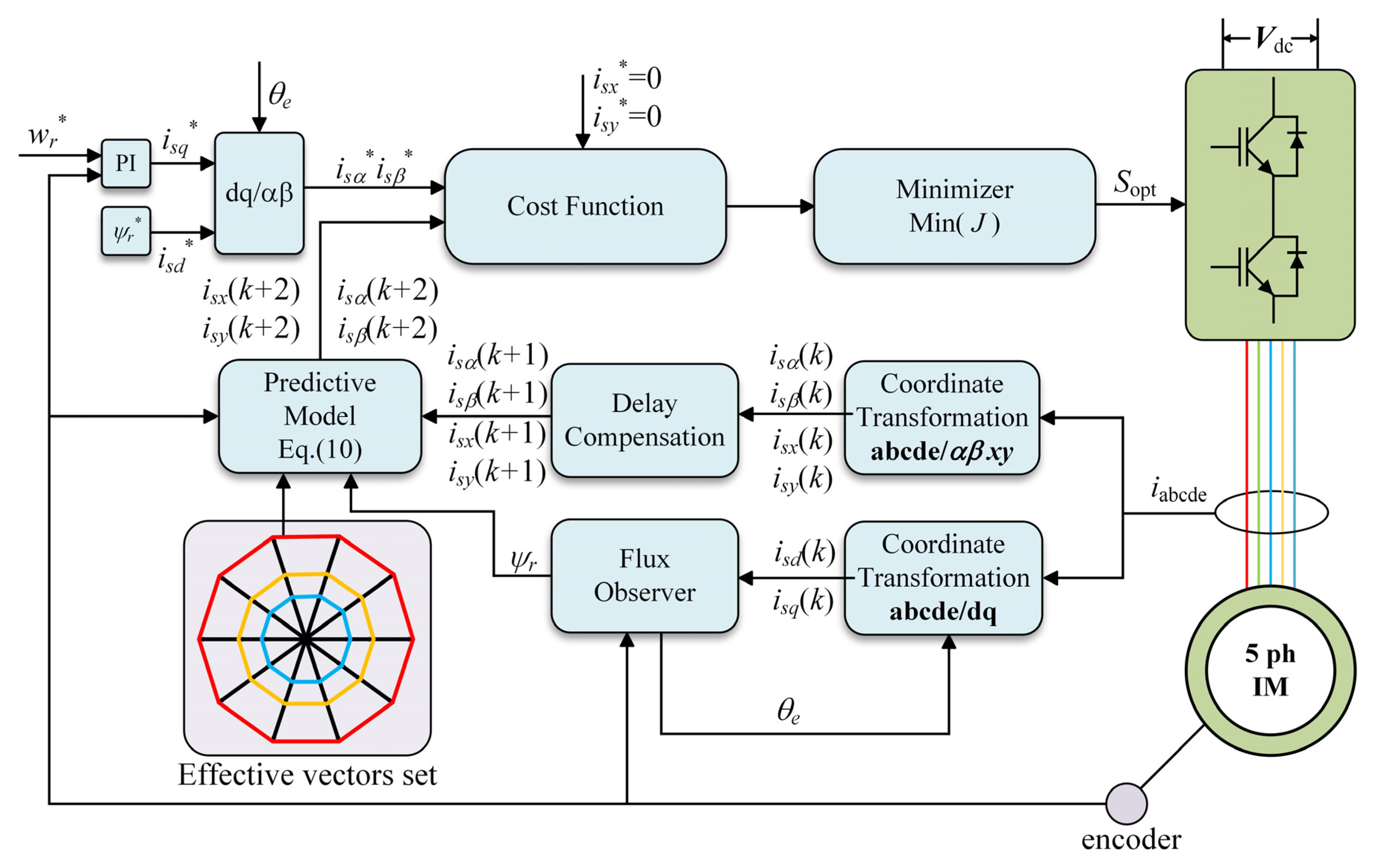
4. Proposed VV-MPCC Schemes
4.1. Prediction Model of Induction Motor
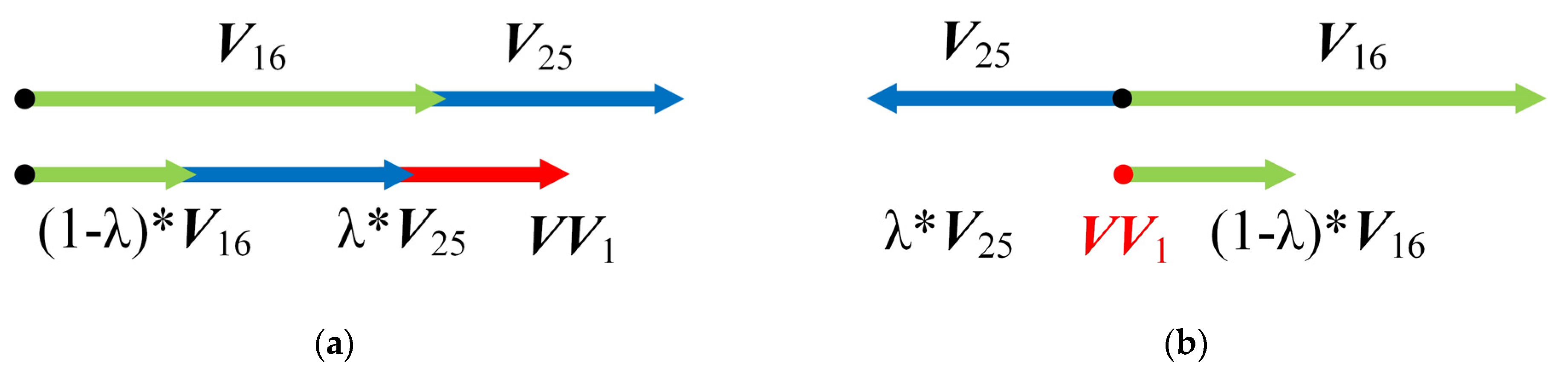
4.2. Cost Function Optimization
5. Simulation Results
5.1. Performance of T-MPC with Different Weighting Factors
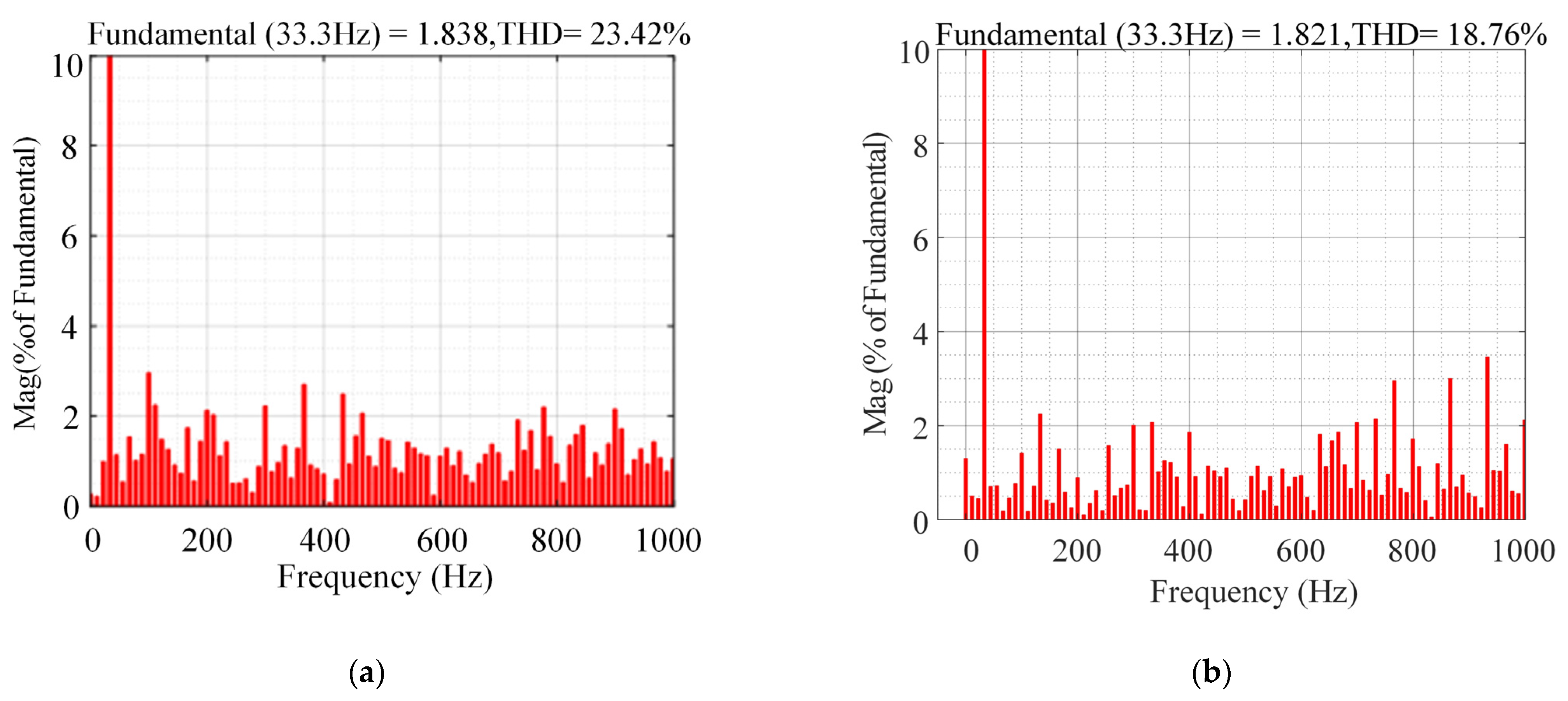
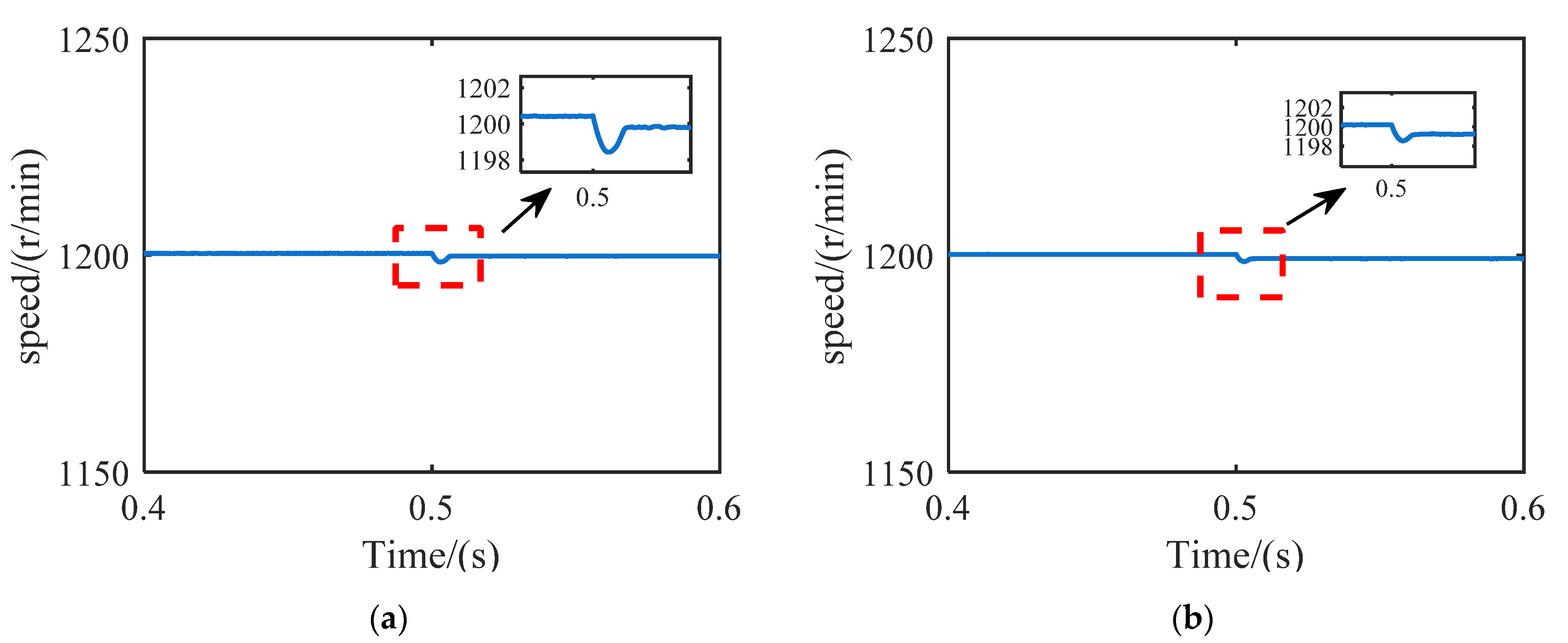
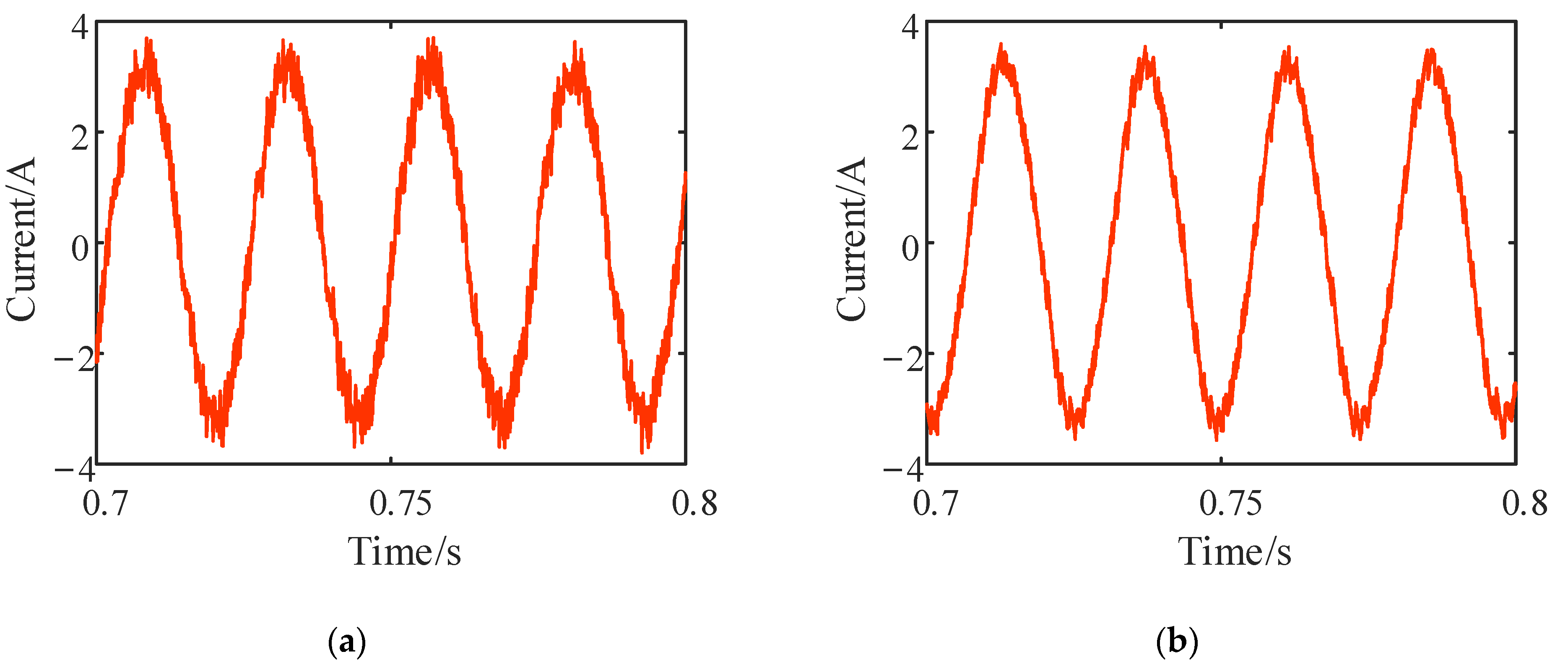
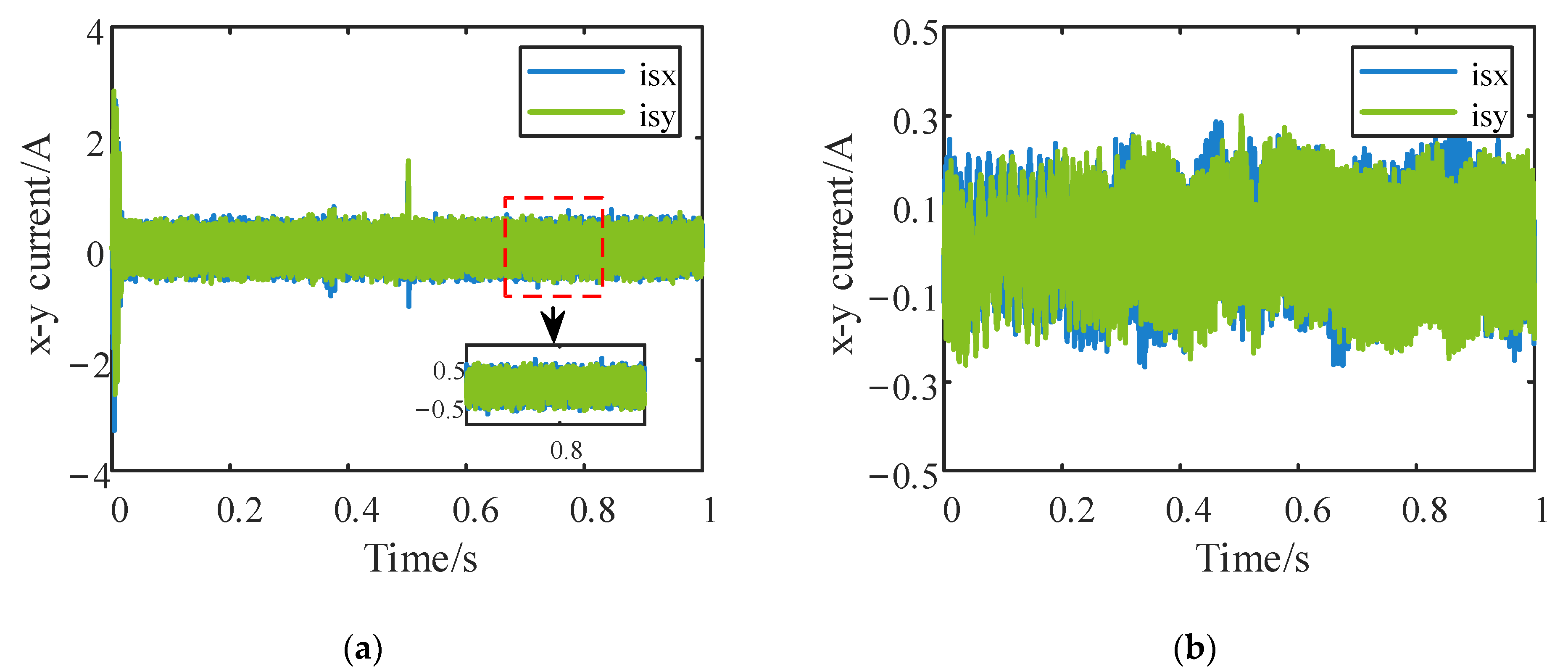
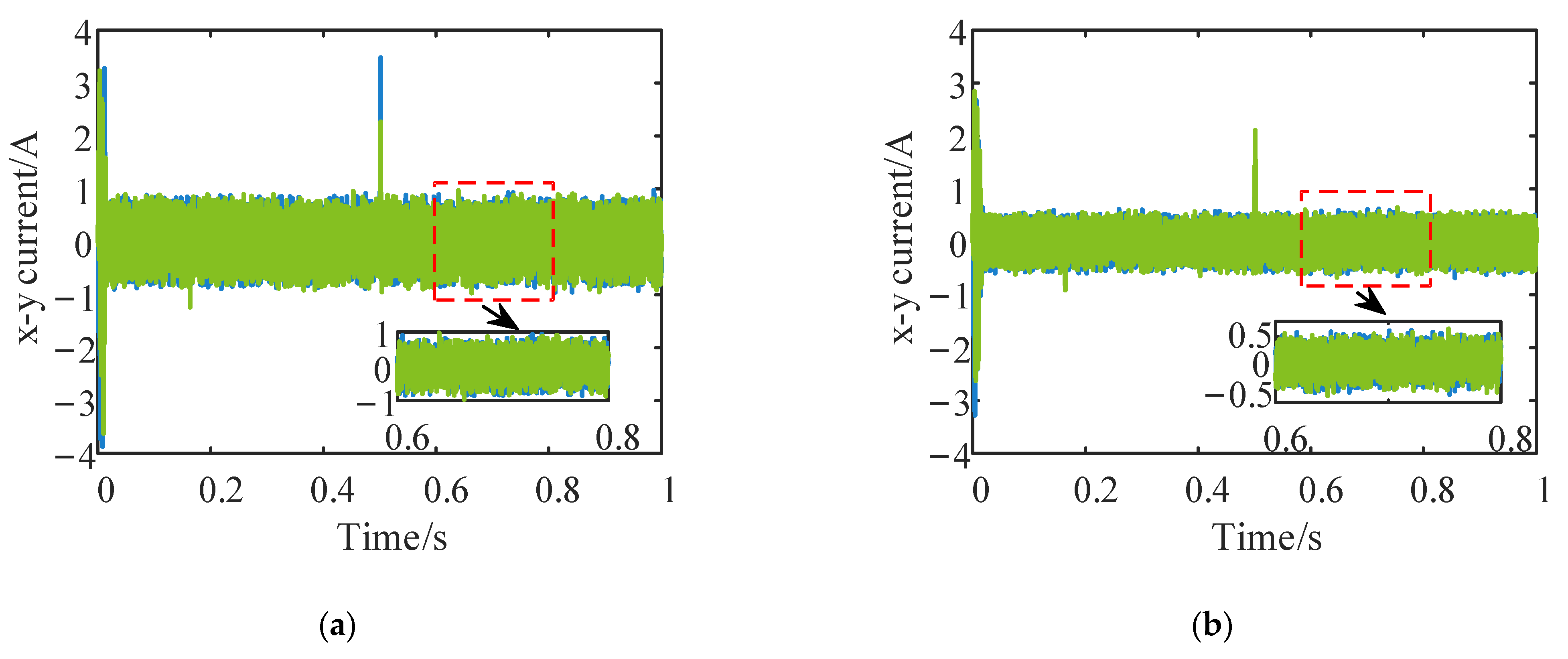
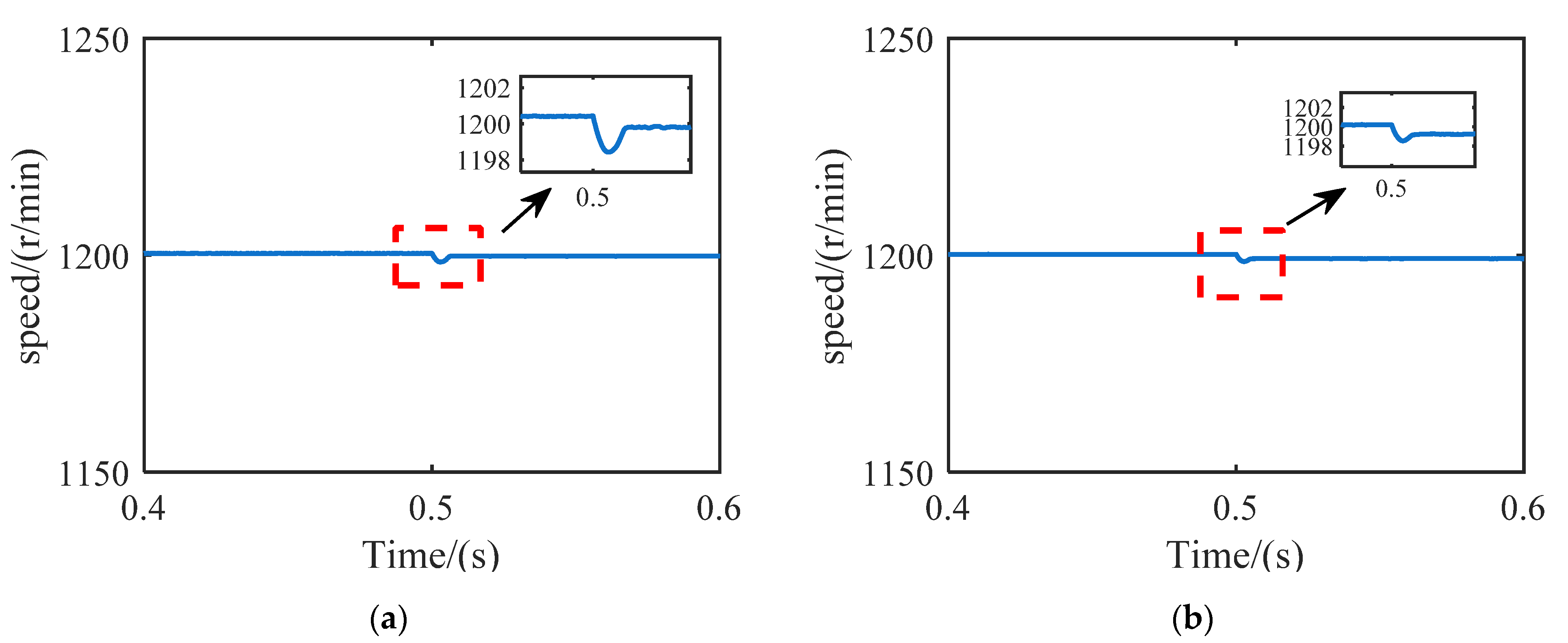
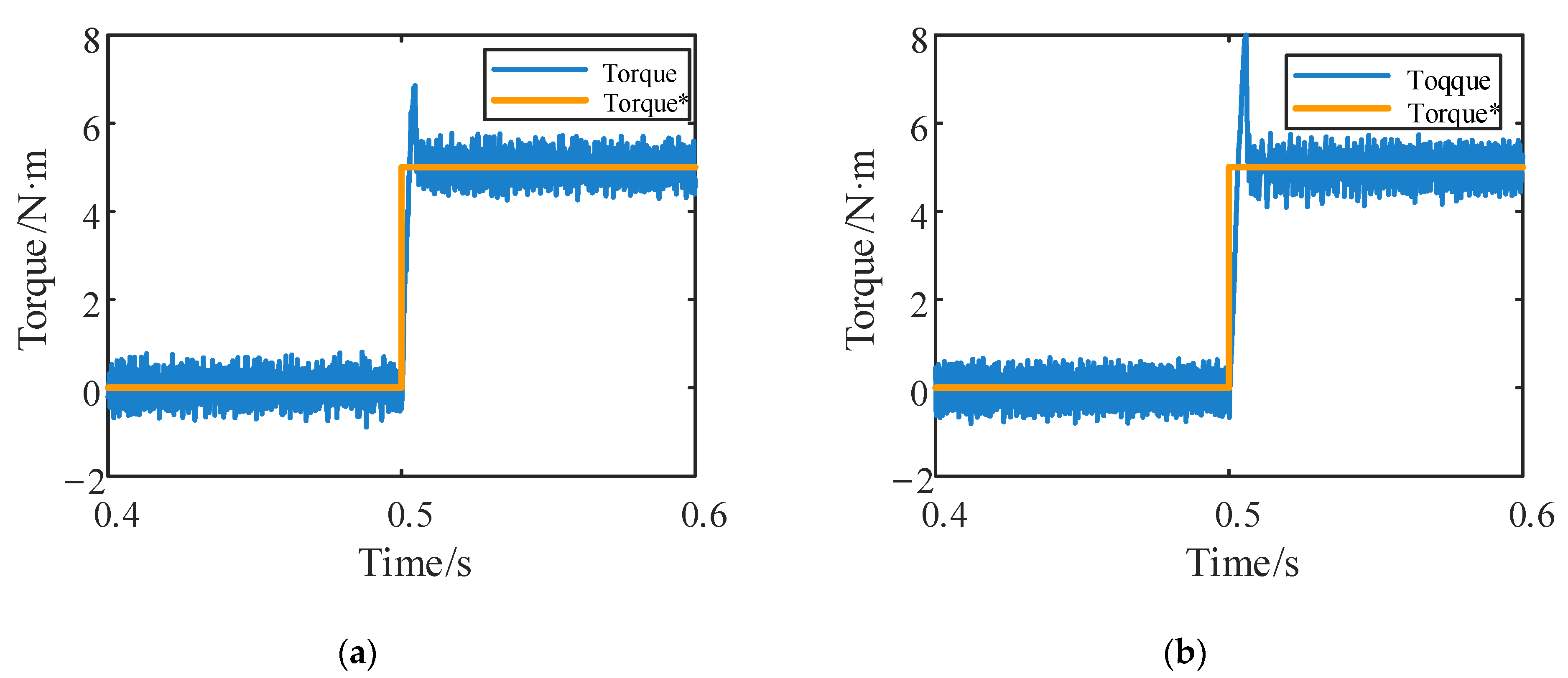
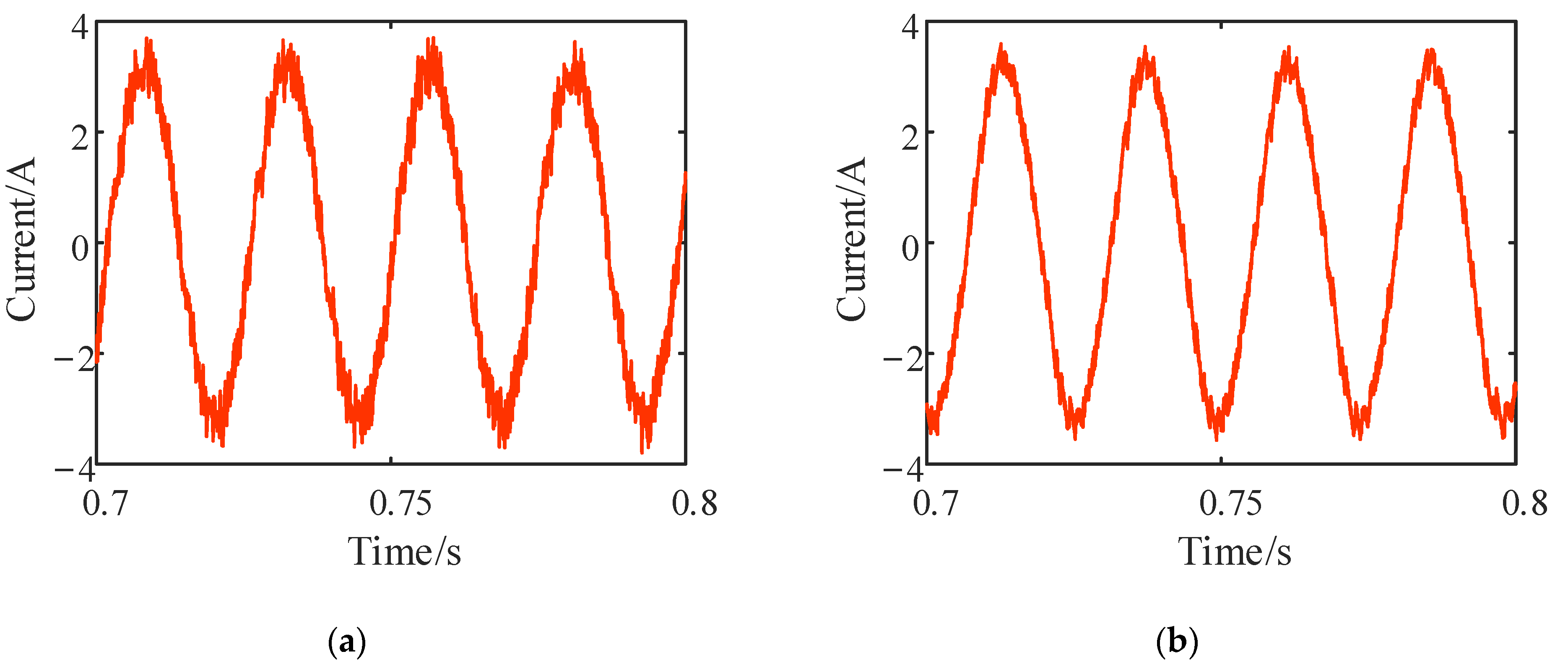
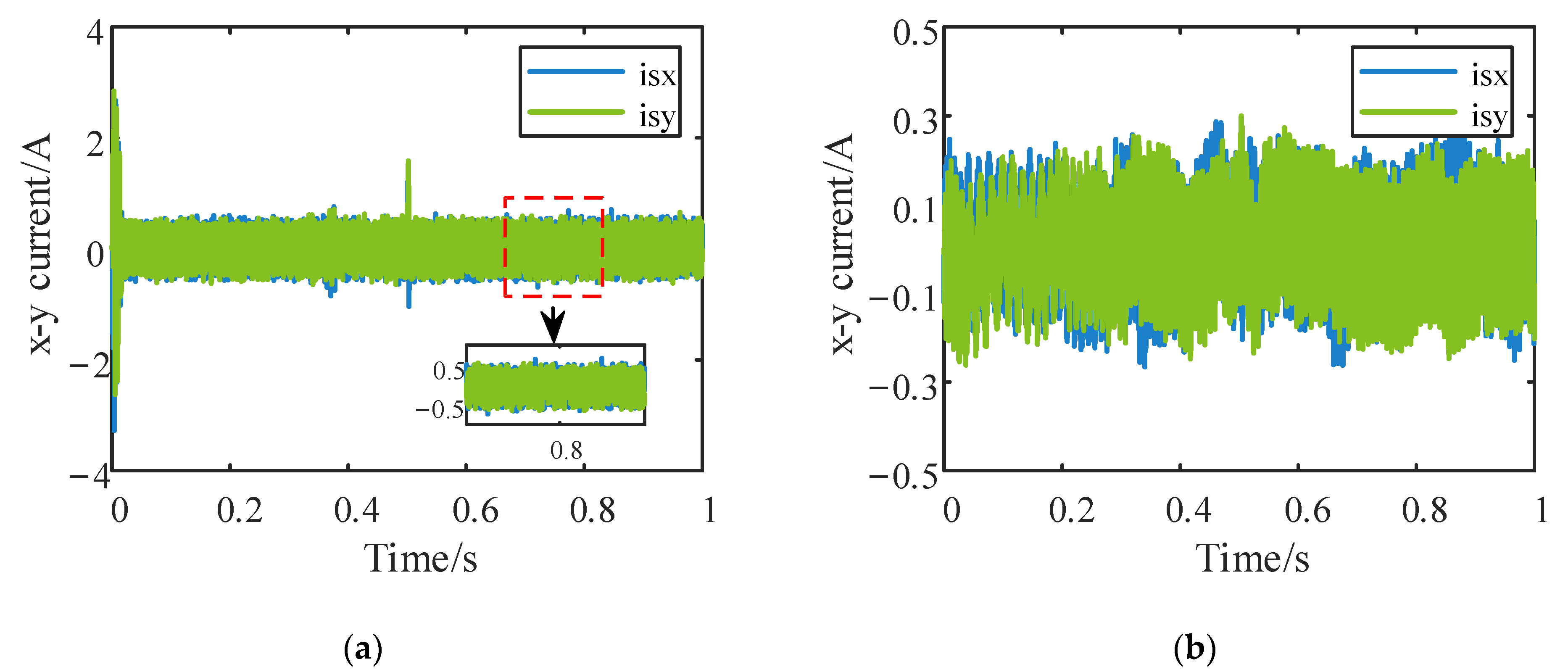
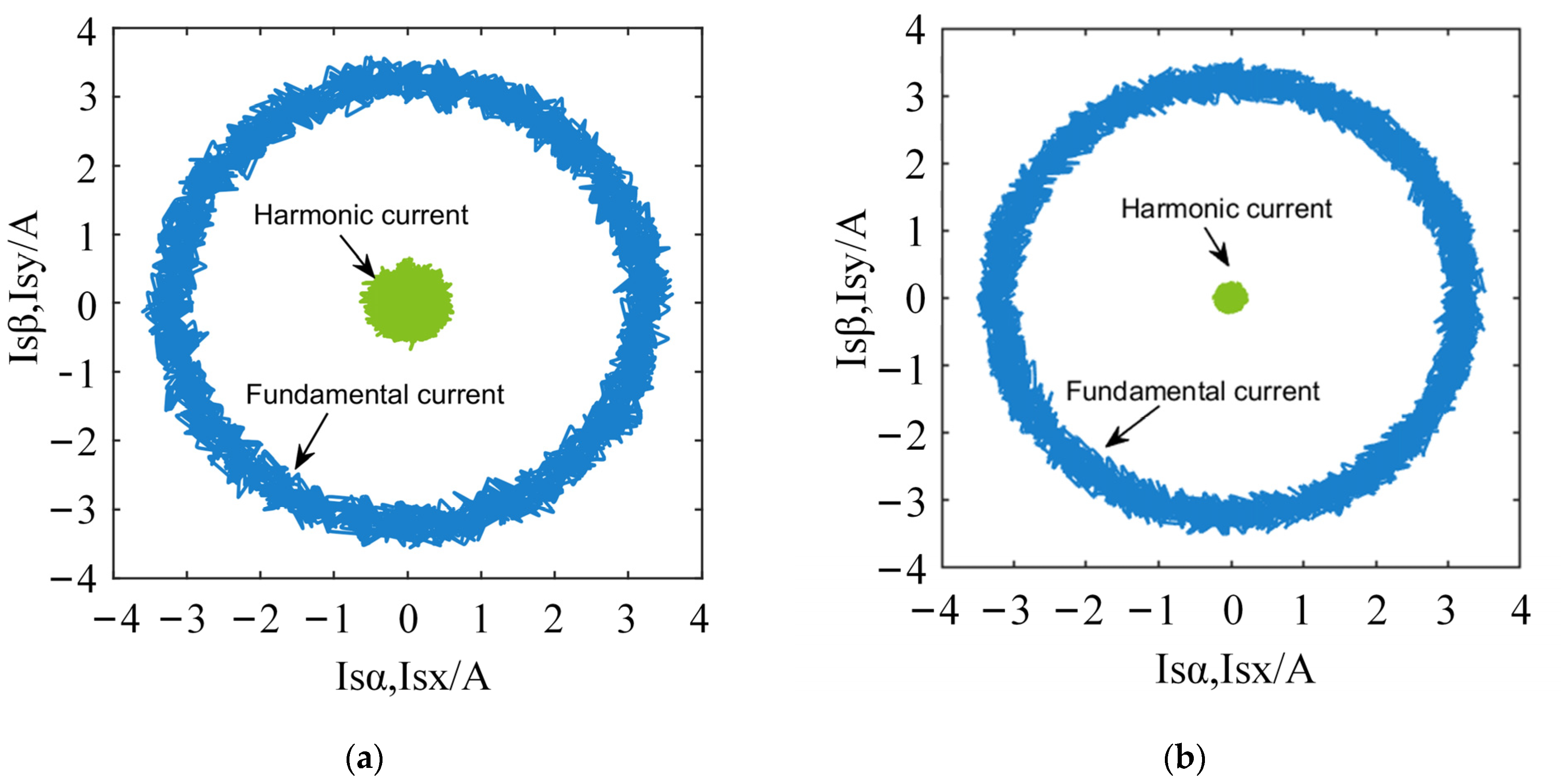
5.2. Performance of Different Control Strategies
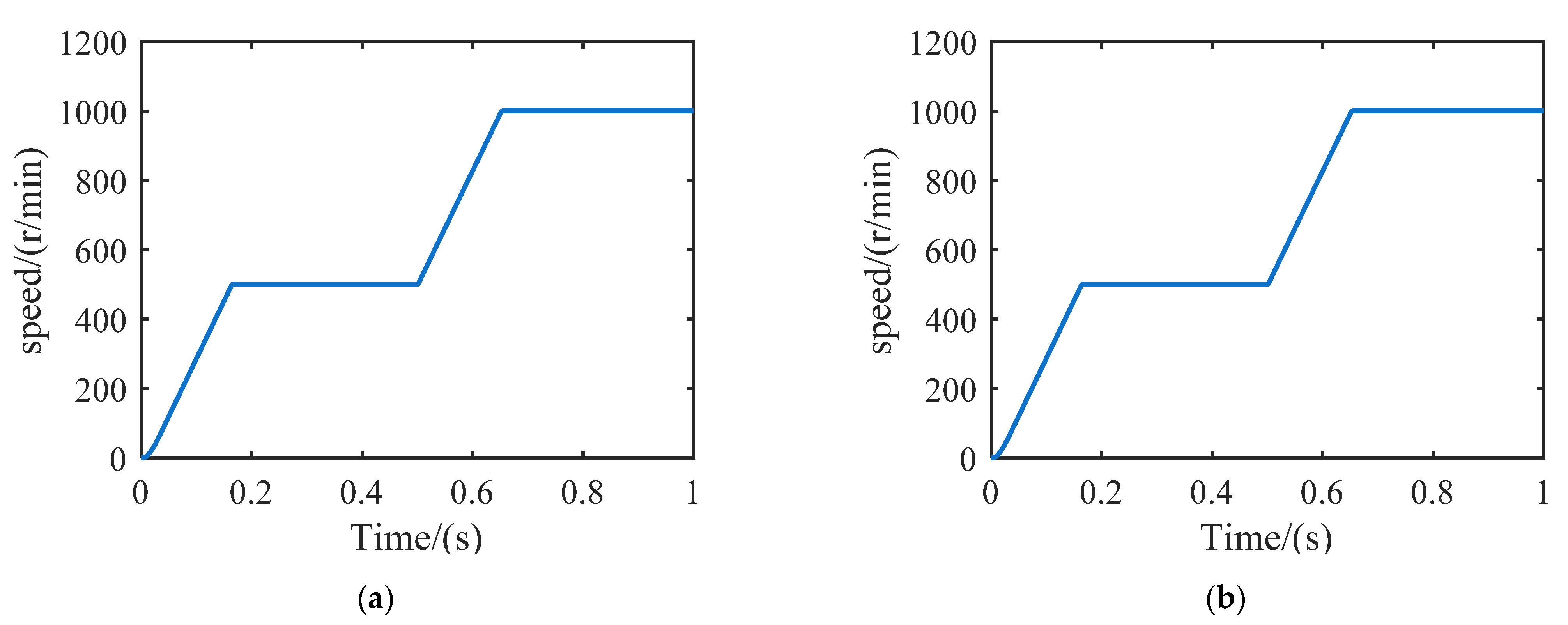
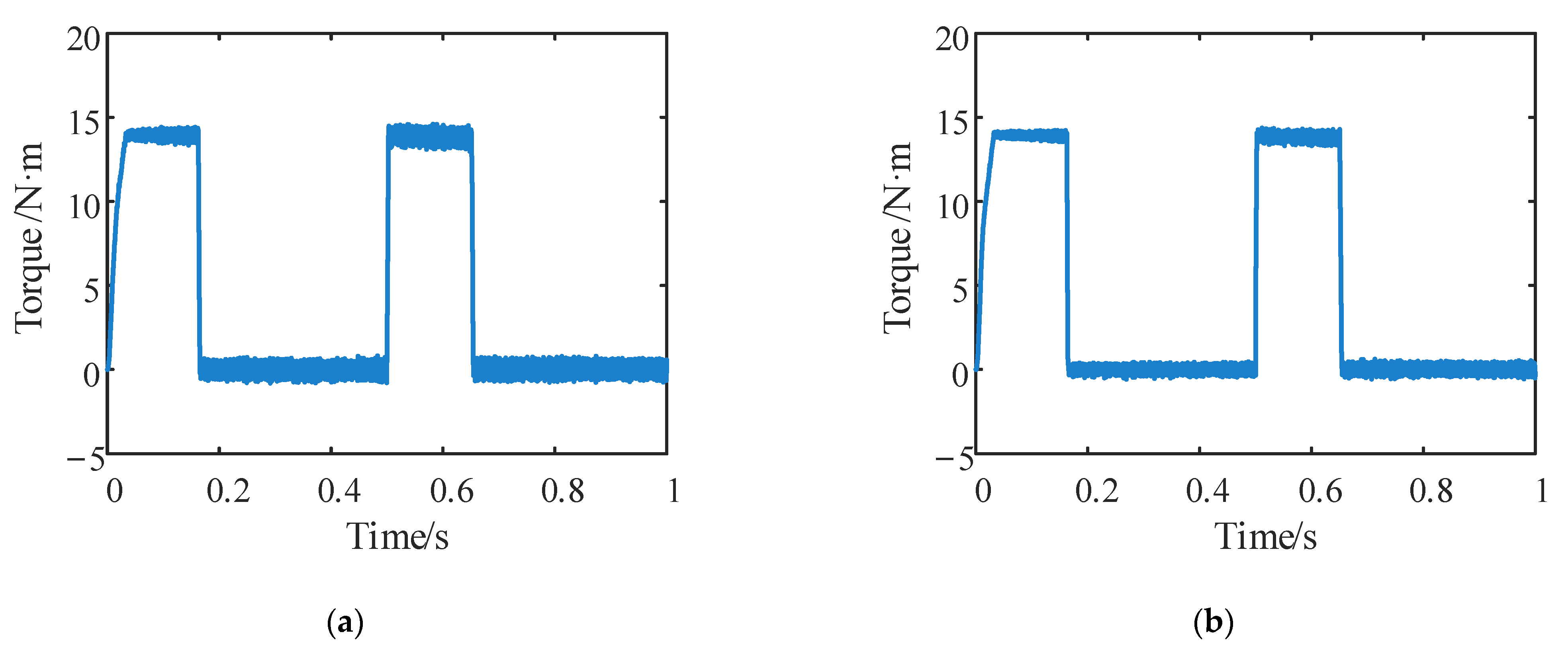
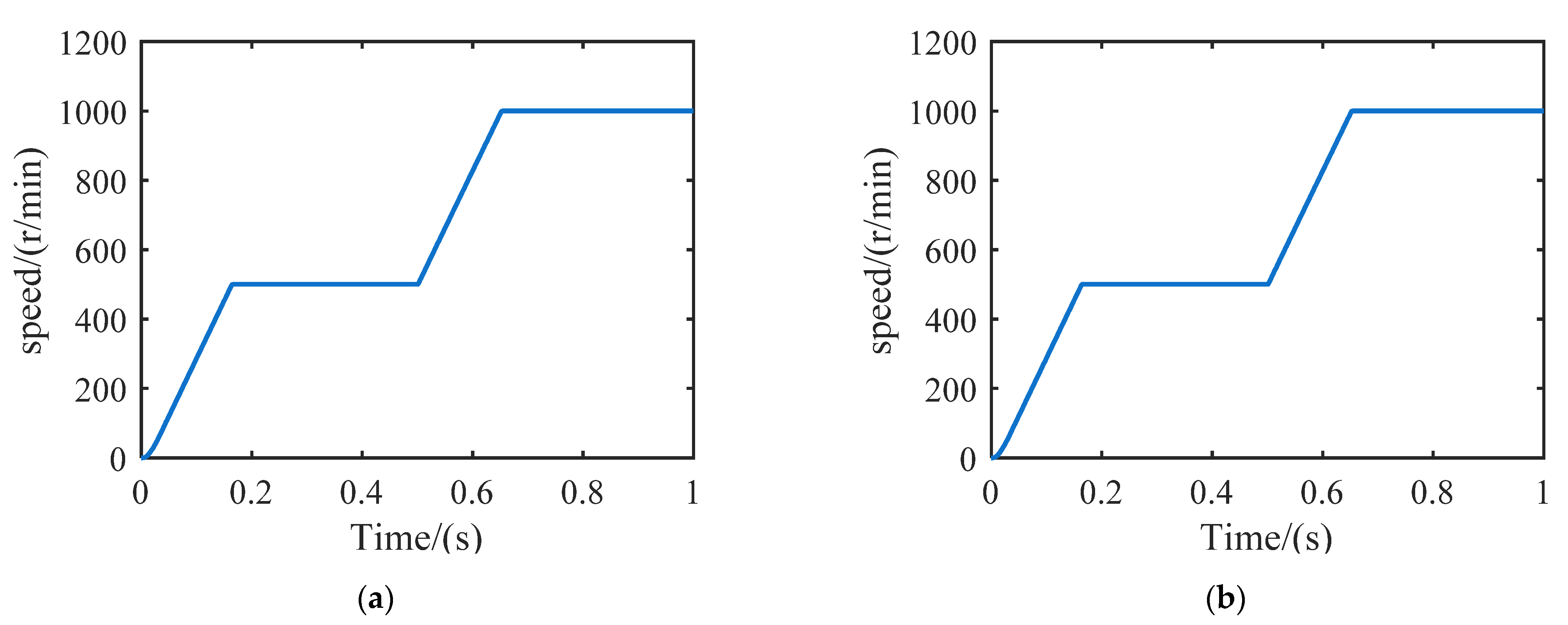
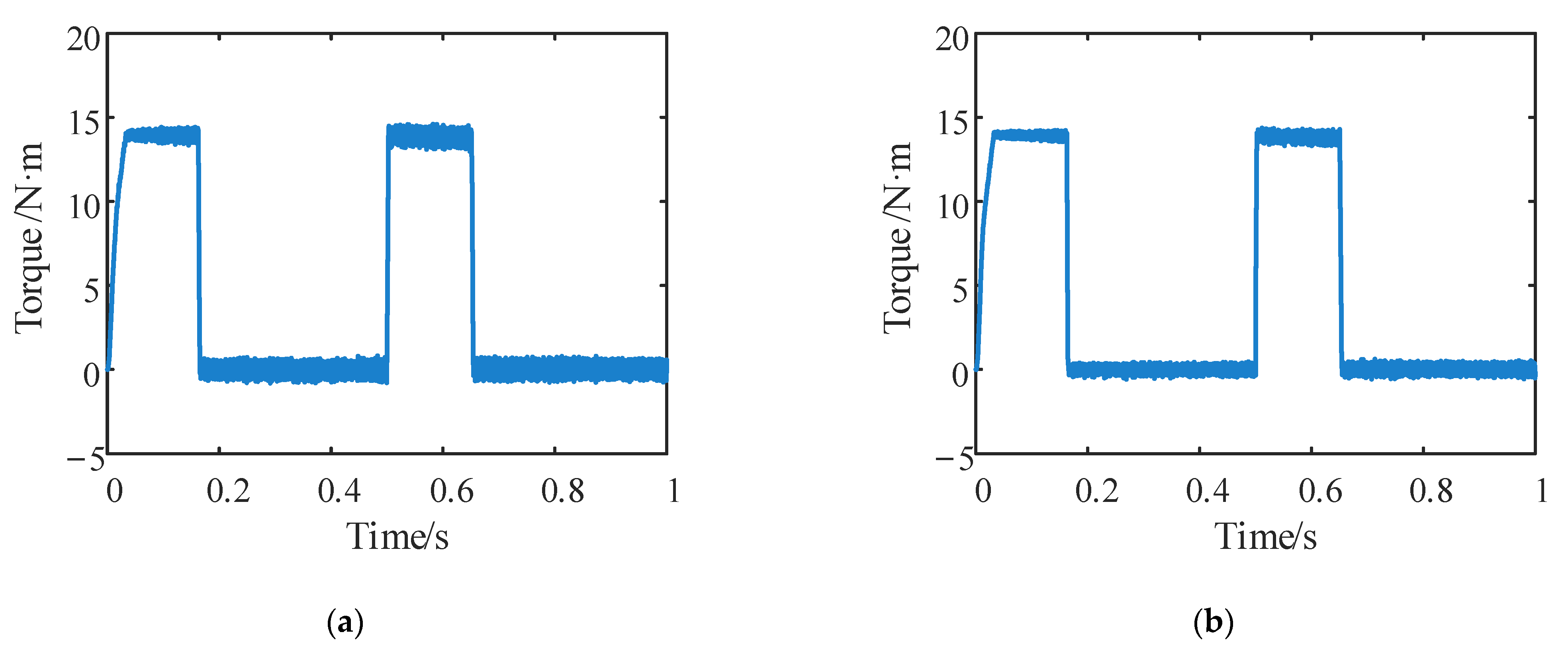
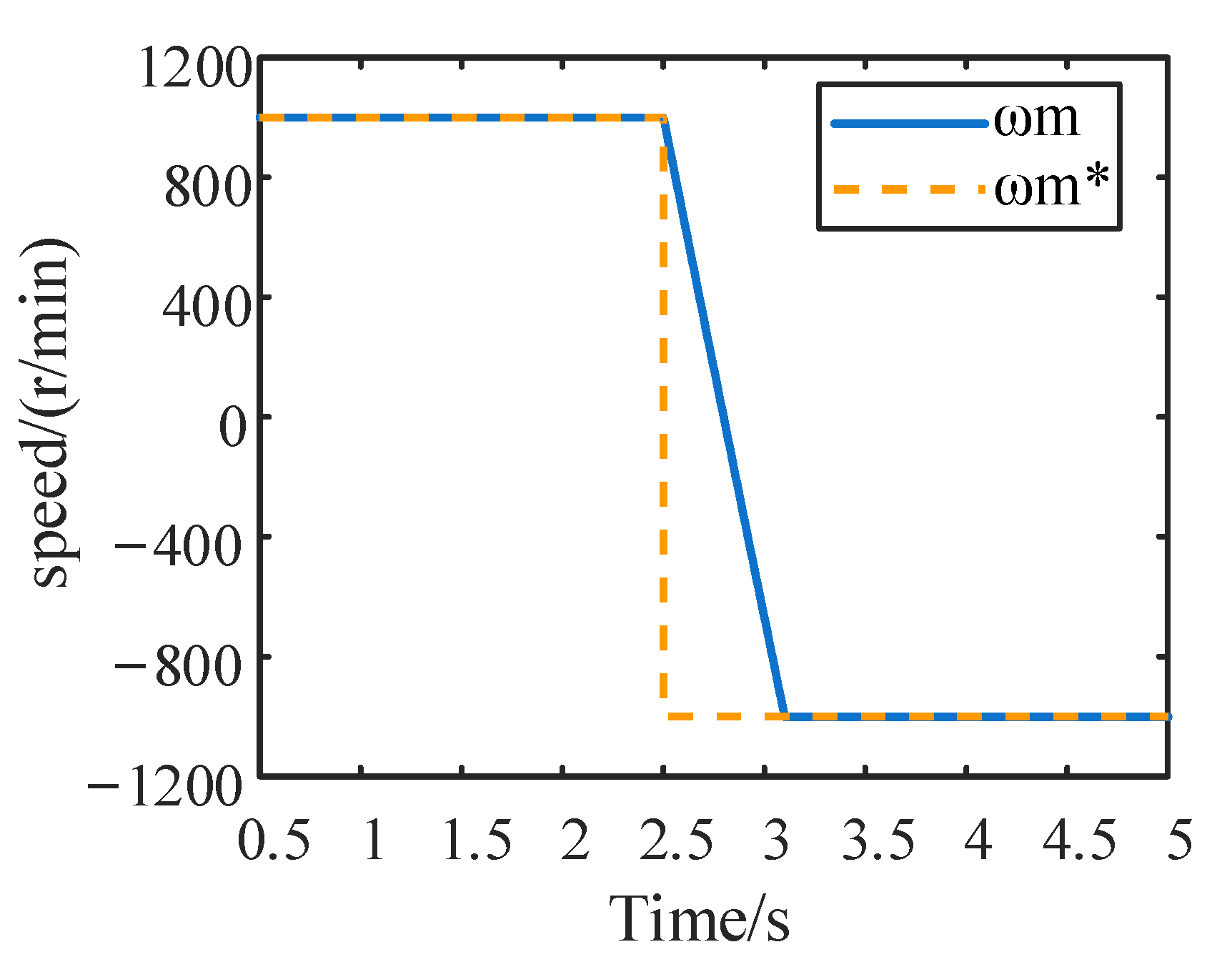
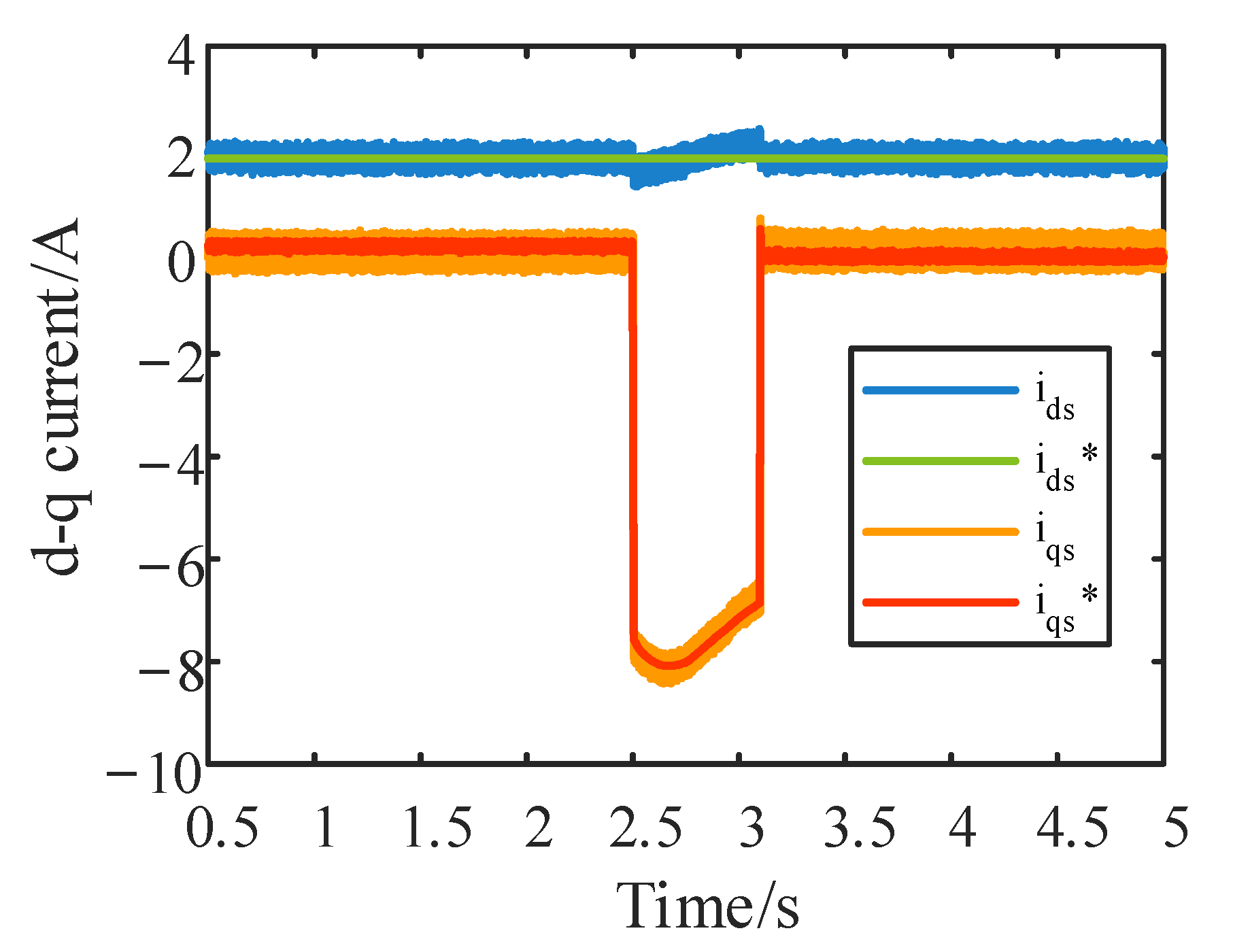
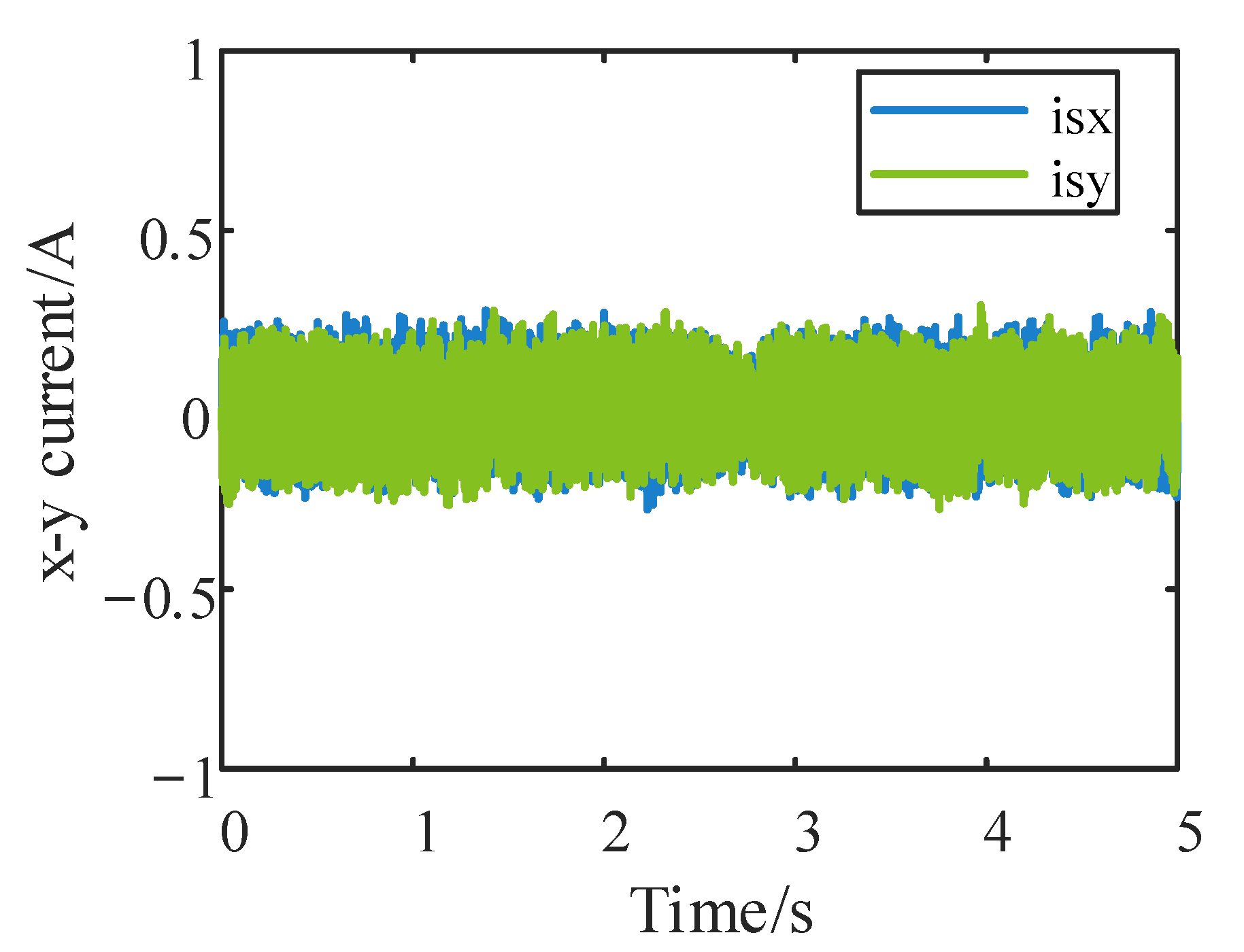
5.3. Forward and Reverse Performance under the Proposed Strategy
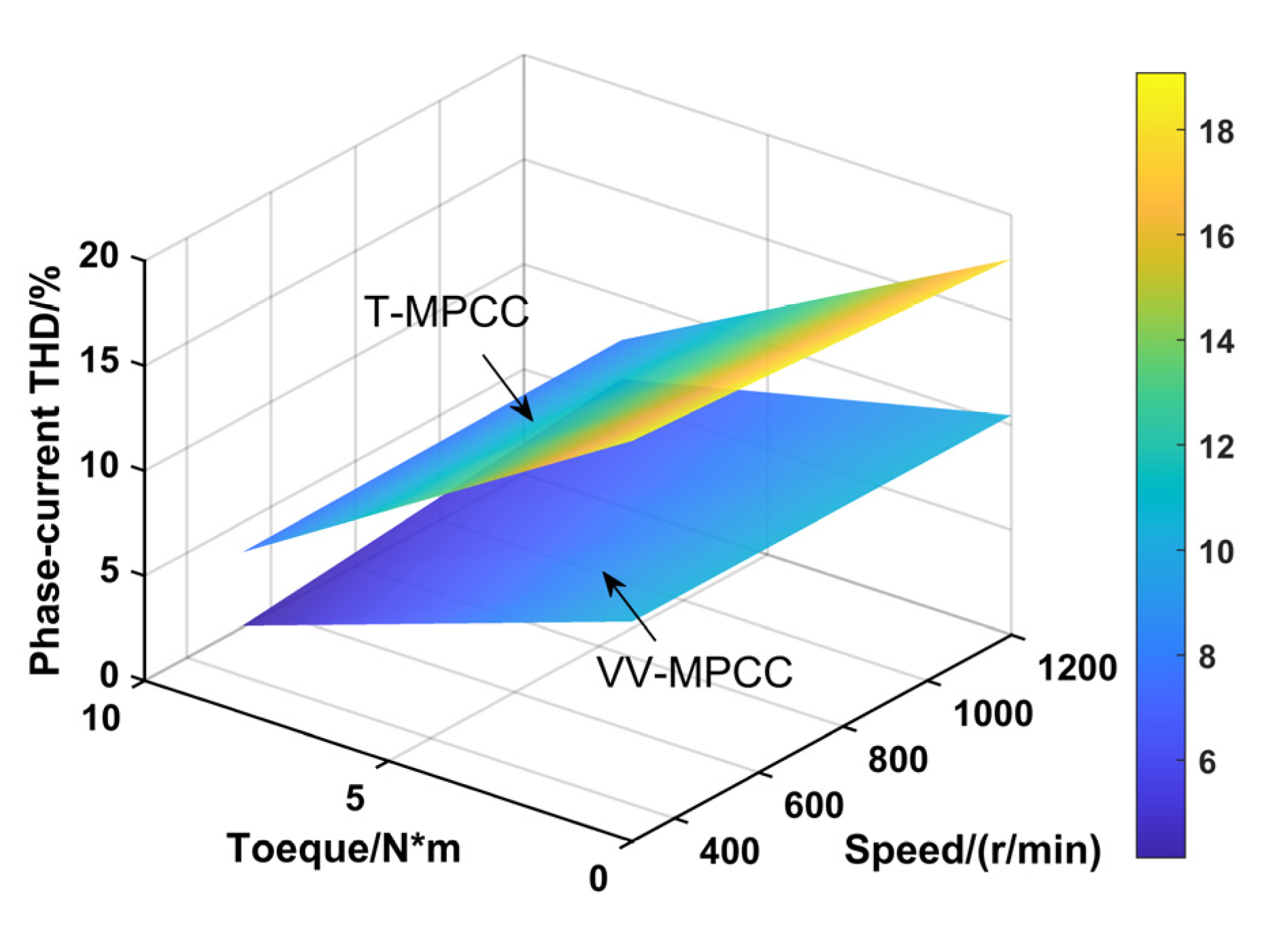
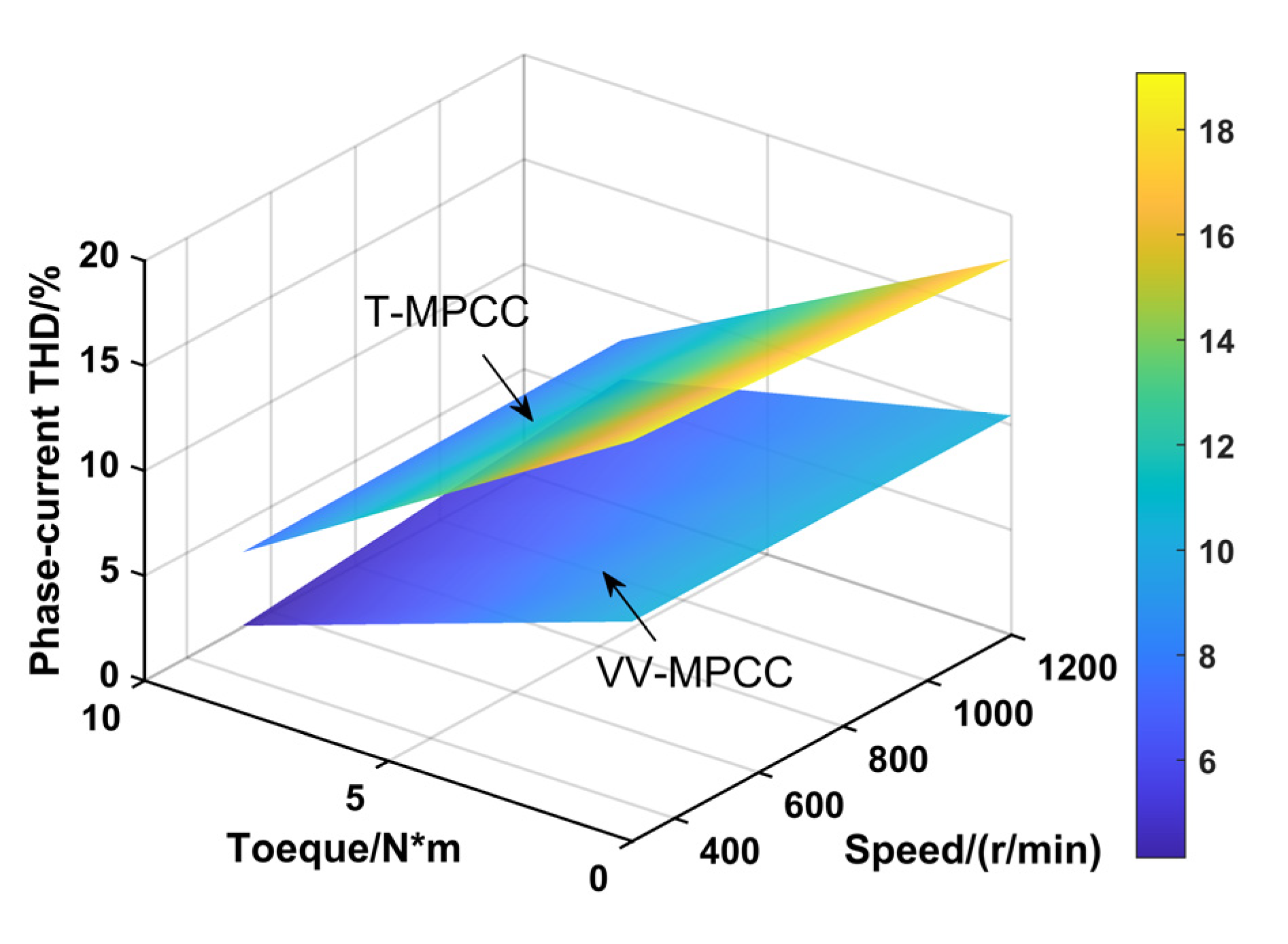
5.4. The Performance of the Proposed Strategy under All Operating Conditions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chan, C.C. The State of the Art of Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Sun, X.; Jin, Z.; Wang, S.; Yang, Z.; Li, K.; Fan, Y.; Chen, L. Performance Improvement of Torque and Suspension Force for a Novel Five-Phase BFSPM Machine for Flywheel Energy Storage Systems. IEEE Trans. Appl. Supercond. 2019, 29, 5–9. [Google Scholar] [CrossRef]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of Permanent-Magnet Brushless Drives for Electric and Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef]
- Frieske, B.; Kloetzke, M.; Mauser, F. Trends in Vehicle Concept and Key Technology Development for Hybrid and Battery Electric Vehicles. World Electr. Veh. J. 2013, 6, 9–20. [Google Scholar] [CrossRef]
- Bojoi, R.; Rubino, S.; Tenconi, A.; Vaschetto, S. Multiphase Electrical Machines and Drives: A Viable Solution for Energy Generation and Transportation Electrification. In Proceedings of the 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2016; pp. 632–639. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.; He, Y.; Cheng, Y.; Saeed, S.; Zhu, J. Enhanced Fault-Tolerant Model Predictive Current Control for a Five-Phase PM Motor with Continued Modulation. IEEE Trans. Power Electron. 2021, 36, 3236–3246. [Google Scholar] [CrossRef]
- Fnaiech, M.A.; Betin, F.; Capolino, G.-A.; Fnaiech, F. Fuzzy Logic and Sliding-Mode Controls Applied to Six-Phase Induction Machine with Open Phases. IEEE Trans. Ind. Electron. 2010, 57, 354–364. [Google Scholar] [CrossRef]
- Zheng, L.; Fletcher, J.E.; Williams, B.W.; He, X. Dual-Plane Vector Control of a Five-Phase Induction Machine for an Improved Flux Pattern. IEEE Trans. Ind. Electron. 2008, 55, 1996–2005. [Google Scholar] [CrossRef]
- Diana, M.; Guglielmi, P.; Vagati, I.A. Very Low Torque Ripple Multi-3-Phase Machines. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1750–1755. [Google Scholar]
- Li, G.; Hu, J.; Li, Y.; Zhu, J. An Improved Model Predictive Direct Torque Control Strategy for Reducing Harmonic Currents and Torque Ripples of Five-Phase Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2019, 66, 5820–5829. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Predictive Control in Power Electronics and Drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Xu, W.; El-Sousy, F.F.M.; Islam, M.R.; Ahmed, A.A. Recent Achievements in Model Predictive Control Techniques for Industrial Motor: A Comprehensive State-of-the-Art. IEEE Access 2021, 9, 58170–58191. [Google Scholar] [CrossRef]
- Martinez, J.C.R.; Kennel, R.M.; Geyer, T. Model Predictive Direct Current Control. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1808–1813. [Google Scholar]
- Iqbal, A.; Alammari, R.; Mosa, M.; Abu-Rub, H. Finite Set Model Predictive Current Control with Reduced and Constant Common Mode Voltage for a Five-Phase Voltage Source Inverter. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 479–484. [Google Scholar] [CrossRef]
- Stolze, P.; Tomlinson, M.; Kennel, R.; Mouton, T. Heuristic Finite-Set Model Predictive Current Control for Induction Machines. In Proceedings of the 2013 IEEE ECCE Asia Downunder—5th IEEE Annual International Energy Convers, Melbourne, VIC, Australia, 3–6 June 2013; pp. 1221–1226. [Google Scholar] [CrossRef]
- Xue, Y.; Meng, D.; Zhao, Z.; Zhao, L.; Diao, L. Model Predictive Current Control in the Stationary Coordinate System for a Three-Phase Induction Motor Fed by a Two-Level Inverter. In Proceedings of the 2019 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Quanzhou, China, 31 May–2 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Kousalya, V.; Rai, R.; Singh, B. Predictive Torque Control of Induction Motor for Electric Vehicle. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 890–895. [Google Scholar]
- Rivera, M.; Riveros, J.A.; Rodriguez, C.; Wheeler, P. Field-Oriented Control with a Predictive Current Strategy of an Induction Machine Fed by a Two-Level Voltage Source Inverter. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Valparaíso, Chile, 22–26 March 2021. [Google Scholar] [CrossRef]
- Lim, C.S.; Levi, E.; Jones, M.; Abdul Rahim, N.; Hew, W.P. Experimental Evaluation of Model Predictive Current Control of a Five-Phase Induction Motor Using All Switching States. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Xue, C.; Song, W.; Feng, X. Model Predictive Current Control Schemes for Five-Phase Permanent-Magnet Synchronous Machine Based on SVPWM. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 648–653. [Google Scholar] [CrossRef]
- Lim, C.S.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W.P. FCS-MPC-Based Current Control of a Five-Phase Induction Motor and Its Comparison with PI-PWM Control. IEEE Trans. Ind. Electron. 2014, 61, 149–163. [Google Scholar] [CrossRef]
- Bermúdez, M.; Martín, C.; González-Prieto, I.; Durán, M.J.; Arahal, M.R.; Barrero, F. Predictive Current Control in Electrical Drives: An Illustrated Review with Case Examples Using a Five-phase Induction Motor Drive with Distributed Windings. IET Electr. Power Appl. 2020, 14, 1291–1310. [Google Scholar] [CrossRef]
- Cortes, P.; Wilson, A.; Kouro, S.; Rodriguez, J.; Abu-Rub, H. Model Predictive Control of Multilevel Cascaded H-Bridge Inverters. IEEE Trans. Ind. Electron. 2010, 57, 2691–2699. [Google Scholar] [CrossRef]
- Duran, M.J.; Prieto, J.; Barrero, F.; Toral, S. Predictive Current Control of Dual Three-Phase Drives Using Restrained Search Techniques. IEEE Trans. Ind. Electron. 2011, 58, 3253–3263. [Google Scholar] [CrossRef]
- Zheng, L.; Fletcher, J.E.; Williams, B.W.; He, X. A Novel Direct Torque Control Scheme for a Sensorless Five-Phase Induction Motor Drive. IEEE Trans. Ind. Electron. 2011, 58, 503–513. [Google Scholar] [CrossRef]
- Bermudez, M.; Gonzalez-Prieto, I.; Barrero, F.; Guzman, H.; Duran, M.J.; Kestelyn, X. Open-Phase Fault-Tolerant Direct Torque Control Technique for Five-Phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2017, 64, 902–911. [Google Scholar] [CrossRef]
- Romero, C.; Delorme, L.; Gonzalez, O.; Ayala, M.; Rodas, J.; Gregor, R. Algorithm for Implementation of Optimal Vector Combinations in Model Predictive Current Control of Six-Phase Induction Machines. Energies 2021, 14, 3857. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, I.; Duran, M.J.; Aciego, J.J.; Martin, C.; Barrero, F. Model Predictive Control of Six-Phase Induction Motor Drives Using Virtual Voltage Vectors. IEEE Trans. Ind. Electron. 2018, 65, 27–36. [Google Scholar] [CrossRef]
- Ryu, H.M.; Kim, J.H.; Sul, S.K. Analysis of Multiphase Space Vector Pulse-Width Modulation Based on Multiple d-q Spaces Concept. IEEE Trans. Power Electron. 2005, 20, 1364–1371. [Google Scholar] [CrossRef]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R.M. Model-Based Predictive Direct Control Strategies for Electrical Drives: An Experimental Evaluation of PTC and PCC Methods. IEEE Trans. Ind. Inform. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Switching States |
|---|---|
| Large | V25 (11001) V24(11000) V28 (11100)V12 (01100) V14 (01110) V6 (00110) V7 (00111) V3 (00011) V19 (10011) V17 (10001) |
| Medium | V16 (10000) V29 (11101) V8 (01000) V30 (11110) V4 (00100) V15 (01111) V2 (00010) V23 (10111) V1 (00001) V27 (11011) |
| Small | V9 (01001) V26 (11010) V20 (10100) V13 (01101) V10 (01010) V22 (10110) V5 (00101) V11 (01011) V18 (10010) V21 (10101) |
| Parameter | Symbol/Unit | Value |
|---|---|---|
| Stator resistance | Rs[Ω] | 1.9 |
| Rotor resistance | Rr[Ω] | 3.4 |
| Stator leakage inductance | Lls[mH] | 35 |
| Rotor leakage inductance | Llr[mH] | 20 |
| Mutual inductance | Lm[mH] | 530 |
| Rotational inertia | J[kg·m2] | 0.04 |
| Pole pairs | np | 2 |
| Rated speed | [r/min] | 1500 |
| Rated power | [kW] | 2.2 |
| Scheme | 1200 r/min | 750 r/min | 300 r/min |
|---|---|---|---|
| T-MPC | 10.67% | 9.91% | 10.77% |
| VV-MPC | 6.65% | 5.68% | 5.82% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Zhao, J.; Yan, S.; Xiong, Y.; Ma, Y.; Chen, H. Virtual Voltage Vector-Based Model Predictive Current Control for Five-Phase Induction Motor. Processes 2022, 10, 1925. https://doi.org/10.3390/pr10101925
Zhang Q, Zhao J, Yan S, Xiong Y, Ma Y, Chen H. Virtual Voltage Vector-Based Model Predictive Current Control for Five-Phase Induction Motor. Processes. 2022; 10(10):1925. https://doi.org/10.3390/pr10101925
Chicago/Turabian StyleZhang, Qingfei, Jinghong Zhao, Sinian Yan, Yiyong Xiong, Yuanzheng Ma, and Hansi Chen. 2022. "Virtual Voltage Vector-Based Model Predictive Current Control for Five-Phase Induction Motor" Processes 10, no. 10: 1925. https://doi.org/10.3390/pr10101925
APA StyleZhang, Q., Zhao, J., Yan, S., Xiong, Y., Ma, Y., & Chen, H. (2022). Virtual Voltage Vector-Based Model Predictive Current Control for Five-Phase Induction Motor. Processes, 10(10), 1925. https://doi.org/10.3390/pr10101925