Computational Thinking and Down Syndrome: An Exploratory Study Using the KIBO Robot †

 ,
,  and
and 
Abstract
:1. Introduction
- They process and organize information slowly, with difficulty.
- They present a deficit in short-term memory, both auditory and visual; however, they capture information better by the visual channel than by the auditory one.
- Their receptive-comprehensive capacity is clearly superior to the expressive one.
- They learn faster by watching their classmates and imitating their responses.
- They work on an activity until they achieve what they propose.
- They have problems generalizing their knowledge to other situations.
- They have difficulties with language, both in the articulation and acquisition of new vocabulary.
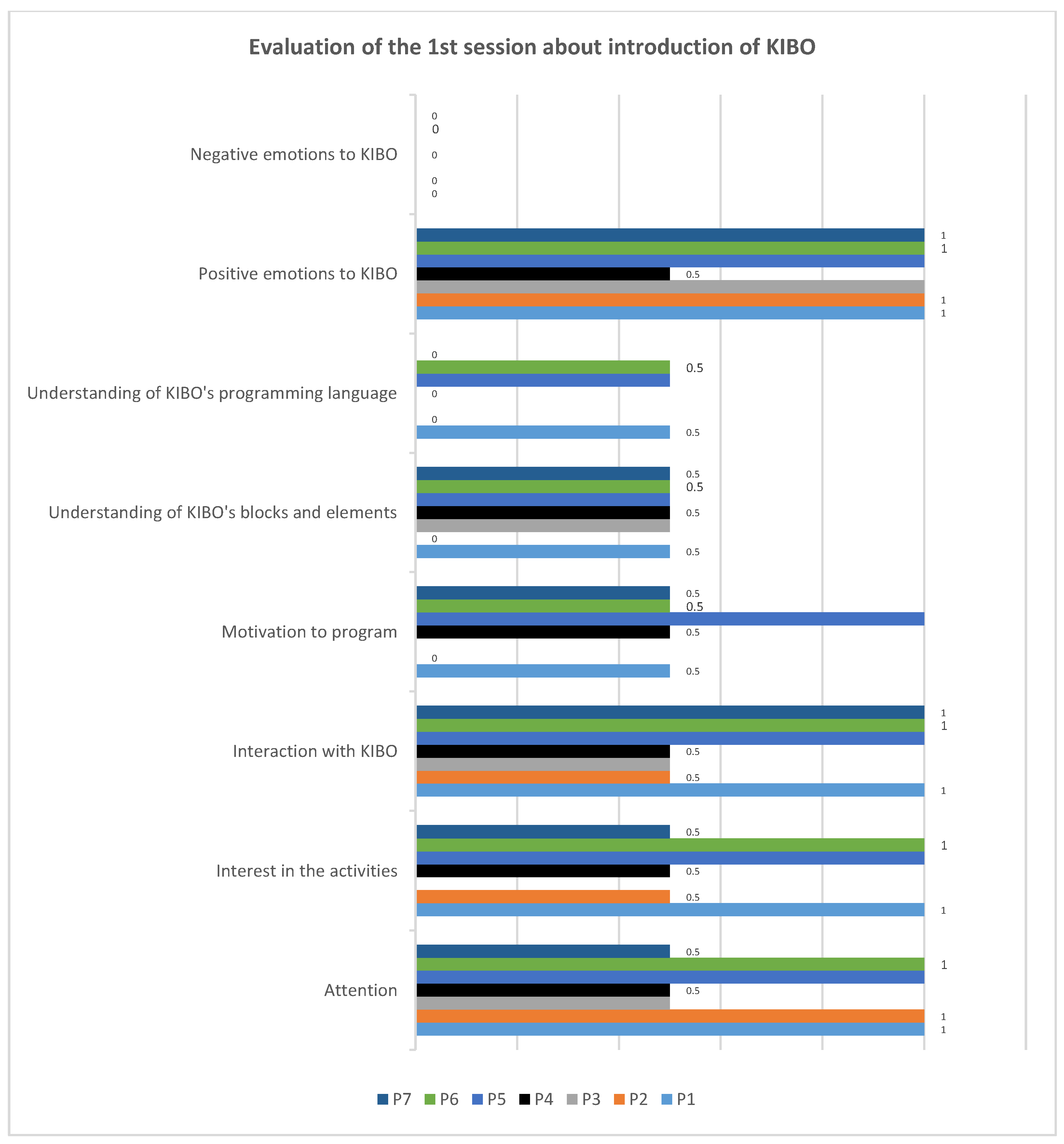
- Do students with DS and cognitive levels from ages 3 to 6 engage with the KIBO robot in a 1:1 or 1:2 class, as measured by their attention span, interest, motivation, and positive emotions?
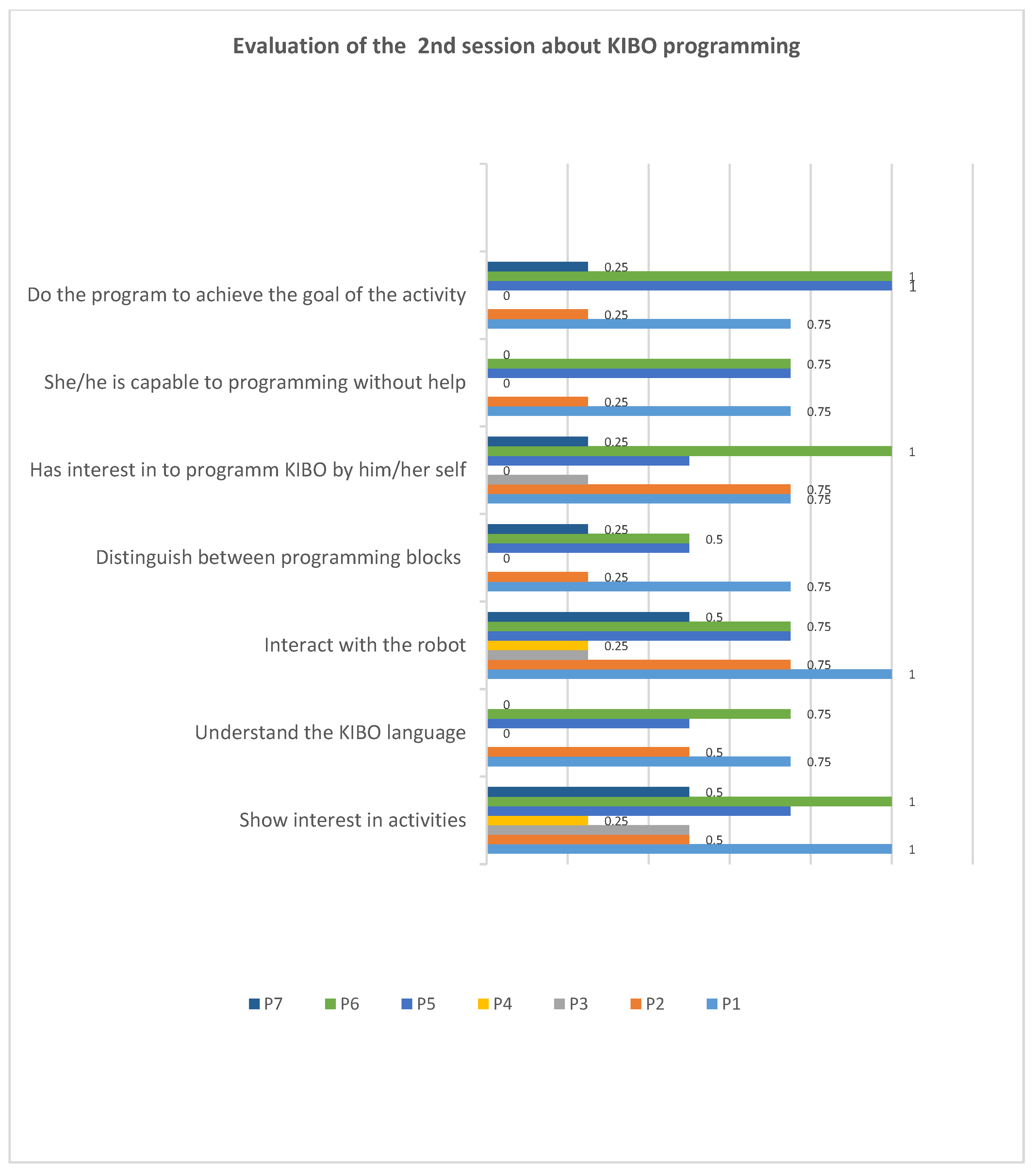
- Can students with DS code with KIBO, as measured by their degree of understanding the sequences and programming?
- How does KIBO affect the emotional behavior of students with DS, as measured through the emotions observed during their interactions with the robot?
2. Related Works
2.1. Computational Thinking Abilities
2.2. CT, Robotics and Cognitive Disabilities
3. Materials and Methods
3.1. Overview
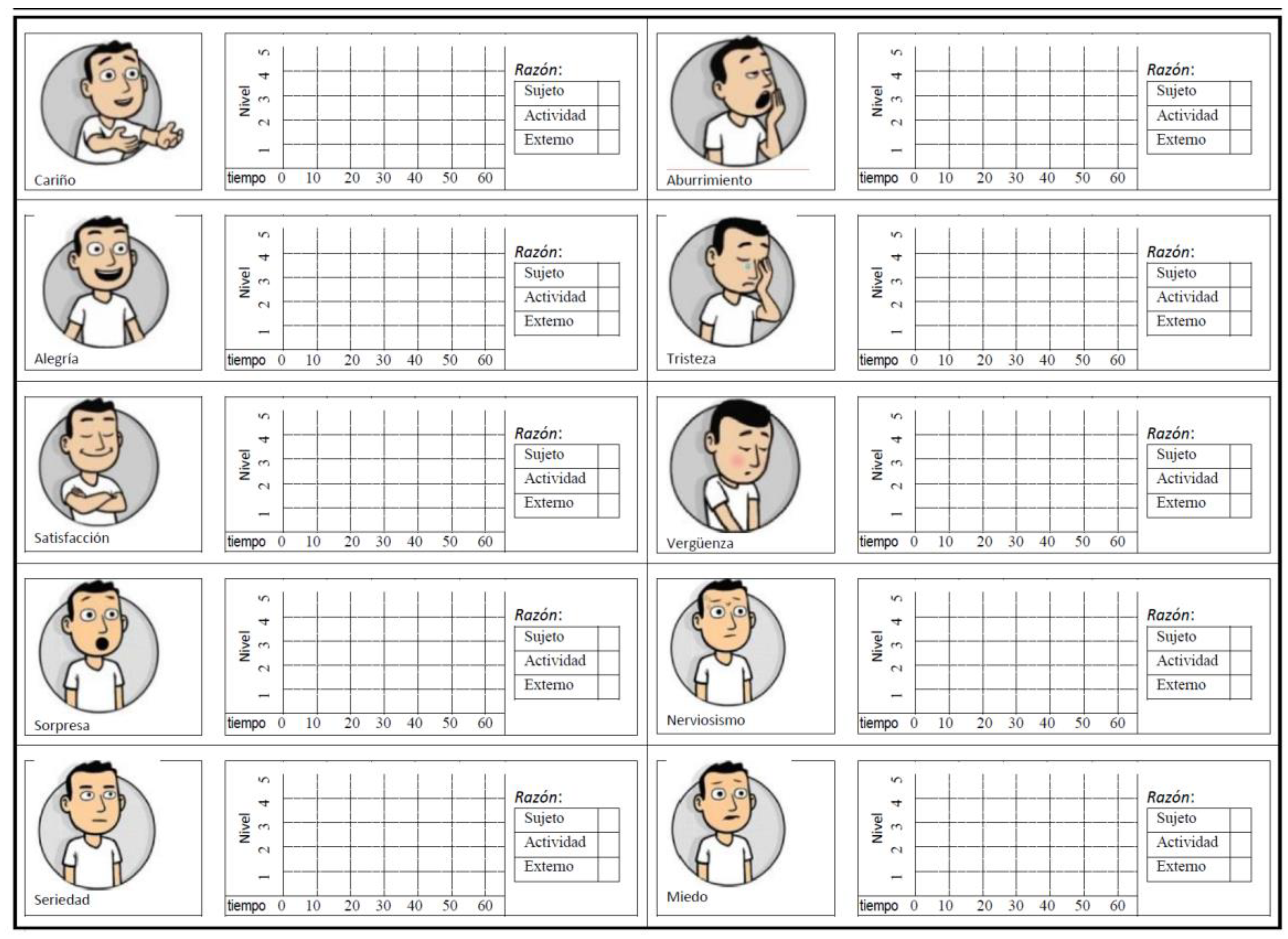
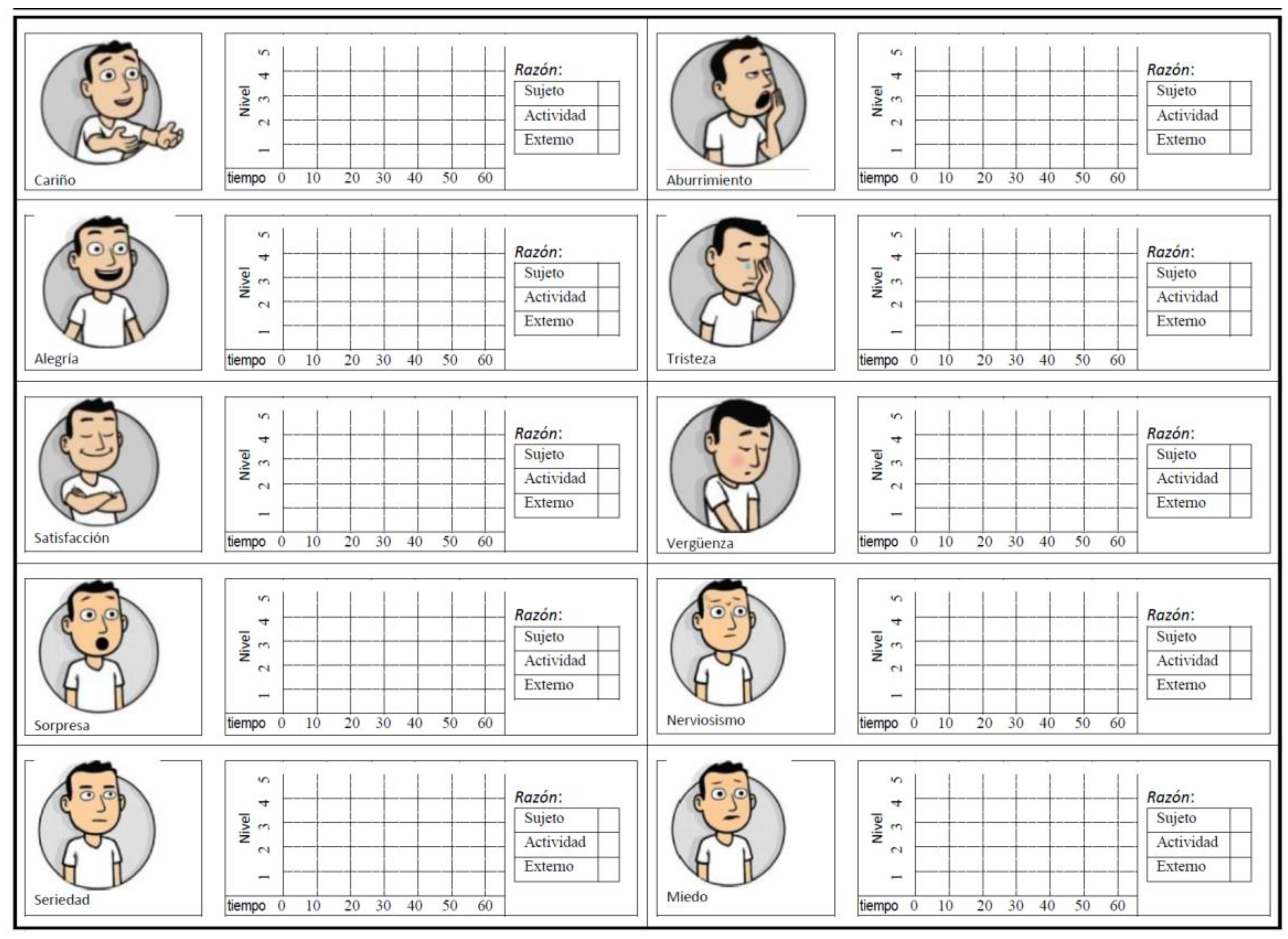
- Verbal: Likert scale or semantic difference to classify emotions; standard emotional profile (SEP), reaction profile, attitude towards ad scale.
- Non-verbal: PrEmo, EmoCards, SAM, LemTool o GEW.
- Facial expressions: Affdex SDK, Facial Coding, FaceAPI, FaceSense, FaceReader, FaceSDK.
- Brain signals: Emotiv-EPOC.
- Biometrics: Wearables for emotional assessment.
3.2. Participants
3.3. Robotic Technology
3.4. Activities
3.5. Sessions
3.6. Data Collection and Analysis
4. Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A—Rubrics

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Did she/he know about robots previously? | Does she/he organize the information received? | Does she/he analyze the information received logically? | Is he/she able to distinguish objects between properties? | Does he/she respond favorably to literacy? | Does he/she respond favorably to logical-mathematical thinking? | |||||||||||||
| S | A | N | S | A | N | S | A | N | S | A | N | S | A | N | S | A | N | |
| Participant 1 | ||||||||||||||||||
| Participant 2 | ||||||||||||||||||
| Participant 3 | ||||||||||||||||||
| Participant 4 | ||||||||||||||||||
| Participant 5 | ||||||||||||||||||
| Participant 6 | ||||||||||||||||||
| Participant 7 | ||||||||||||||||||
| A | S | N | |
| Pays attention when the robot is presented | |||
| Shows an interest in the activities presented | |||
| Interacts with the robot | |||
| Shows an interest in programming the robot to achieve a specific goal | |||
| Identifies KIBO’s different programming blocks | |||
| Tries to understand KIBO’s programming language | |||
| KIBO causes joy | |||
| KIBO causes rejection |
| 1 | 2 | 3 | 4 | 5 | |
| Shows an interest in the activities planned | |||||
| Understands KIBO’s programming language | |||||
| Interacts with the robot | |||||
| Identifies KIBO’s different programming blocks | |||||
| Shows an interest in programming the robot to achieve a specific goal | |||||
| Is capable of programming without help | |||||
| Does the programming intentionally to achieve the objective of each activity |
References
- Bers, M.U. Conclusion. In Coding as a Playground; Routledge: London, UK, 2017; pp. 182–184. [Google Scholar]
- Resnick, M.; Siegel, D. InvIted commentary a different approach to coding. Int. J. People Oriented Program. 2015, 4, 1–4. [Google Scholar]
- Marina Umaschi Bers, Coding as a Literacy for the 21st Century—Education Futures: Emerging Trends in K-12—Education Week, Education Week. 2018. Available online: https://blogs.edweek.org/edweek/education_futures/2018/01/coding_as_a_literacy_for_the_21st_century.html (accessed on 18 June 2019).
- Bers, M.U.; González-González, C.S.; Torres, M.B.A. Coding as a playground: Promoting positive learning experiences in childhood classrooms. Comput. Educ. 2019, 138, 130–145. [Google Scholar] [CrossRef]
- Garcia-Penalvo, F.J. A brief introduction to TACCLE 3—Coding European project. In Proceedings of the 2016 International Symposium on Computers in Education (SIIE), Salamanca, Spain, 13–15 september 2016; pp. 1–4. [Google Scholar]
- Bocconi, A.C.S.; Dettori, K.E.G.; Ferrari, A. Developing Computational Thinking in Compulsory Education; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Ackermann, E. Piaget’s constructivism, papert’s constructionism: What’s the difference? Future Learn. Group Publ. 2001, 5, 438. [Google Scholar]
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books, Inc.: New York, NY, USA, 1993. [Google Scholar]
- Wing, J.M. Computational thinking. Commun. ACM 2006, 49, 33. [Google Scholar] [CrossRef]
- Balanskat, A.; Engelhardt, K. Computing Our Future Computer Programming and Coding Priorities, School Curricula and Initiatives across Europe; European Schoolnet: Brussels, Belgium, 2015. [Google Scholar]
- Jung, S.; Won, E.; Jung, S.E.; Won, E. Systematic review of research trends in robotics education for young children. Sustainability 2018, 10, 905. [Google Scholar] [CrossRef]
- de Salamanca, F.E.U.; García-Peñalvo, F.J.; Prieto, X.M.; Vidal, E.V. Education in the Knowledge Society; Ediciones Universidad de Salamanca: Salamanca, Spain, 2017. [Google Scholar]
- Moreno-Leon, J.; Robles, G. The Europe code week (CodeEU) initiative shaping the skills of future engineers. In Proceedings of the 2015 IEEE Global Engineering Education Conference (EDUCON), Tallinn, Estonia, 18–20 March 2015; pp. 561–566. [Google Scholar]
- Instituto Nacional de Tecnologías Educativas y de Formación del Profesorado–INTEF. Programación, robótica y pensamiento computacional en el aula. Situación en España 2018. Available online: http://code.intef.es/wp-content/uploads/2017/09/Pensamiento-Computacional-Fase-1-Informe-sobre-la-situaci%c3%b3n-en-Espa%c3%b1a.pdf (accessed on 18 June 2019).
- Bers, M.U. Design principles. In Coding as a Playground; Routledge: London, UK, 2017; pp. 163–172. [Google Scholar]
- Bers, M.U.; Horn, M.S. Tangible programming in early childhood: Revisiting developmental assumptions through new technologies. In The Go-To Guide for Engineering Curricula PreK-5: CHOOSING and Using The Best Instructional Materials for Your Students; Sneider, C.I., Ed.; SAGE: Portland, OR, USA, 2014; pp. 133–145. [Google Scholar]
- Komis, V.; Misirli, A. The environments of educational robotics in early childhood education: Towards a didactical analysis. Educ. J. Univ. Patras UNESCO Chair. 2016, 3, 238–246. [Google Scholar]
- Stoeckelmayr, K.; Tesar, M.; Hofmann, A. Kindergarten children programming robots: A first attempt. In Proceedings of the 2nd International Conference on Robotics in Education (RIE), Vienna, Austria, September 2011. [Google Scholar]
- Eck, J.; Hirschmugl-Gaisch, S.; Hofmann, A.; Kandlhofer, M.; Rubenzer, S.; Steinbauer, G. Innovative concepts in educational robotics: Robotics projects for kindergartens in Austria. In Proceedings of the Austrian Robotics Workshop, Vienna, Austria, May 2013. [Google Scholar]
- Janka, P. Using a programmable toy at preschool age: Why and how? In Proceedings of the International Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR), Venice, Italy, 3–4 November 2008; pp. 112–121. [Google Scholar]
- Baxter, P.; Ashurst, E.; Read, R.; Kennedy, J.; Belpaeme, T. Robot education peers in a situated primary school study: Personalisation promotes child learning. PLoS ONE 2017, 12, e0178126. [Google Scholar] [CrossRef]
- Filgueira, M.G.; González, C.S.G. PequeBot: Propuesta de un Sistema Ludificado de Robótica Educativa para la Educación Infantil. 2017. Available online: https://riull.ull.es/xmlui/handle/915/6677 (accessed on 18 June 2019).
- Nadel, L. Down’s syndrome: A genetic disorder in biobehavioral perspective. Genes. Brain Behav. 2003, 2, 156–166. [Google Scholar] [CrossRef]
- Bailey, N. Diagnostic manual—Intellectual disability: A textbook of diagnosis of mental disorders in persons with intellectual disability (DM-ID). Adv. Ment. Heal. Learn. Disabil. 2008, 2, 60–61. [Google Scholar] [CrossRef]
- Tien, B.; PREP Program. Effective Teaching Strategies for Successful Inclusion: A Focus on Down Syndrome; PREP Program: Calgary, AB, Canada, 1999. [Google Scholar]
- González, C.; Noda, A.; Bruno, A.; Moreno, L.; Muñoz, V. Learning subtraction and addition through digital boards: A down syndrome case. Univ. Access. Inf. Soc. 2015, 14, 29–44. [Google Scholar] [CrossRef]
- Ministry of Education. Down syndrome A resource for educators Mate P¯ uira Kehe He rauemi m¯ a te kaiwhakaako. 2015. Available online: https://www.inclusive.tki.org.nz/assets/inclusive-education/MOE-publications/MOESE0045DownSyndrome-booklet.pdf (accessed on 18 June 2019).
- Carrión, P.V.T. Evaluación de Estrategias de Aprendizaje con HCI KINECT en Alumnos con Síndrome Down. 2017. Available online: http://e-spacio.uned.es/fez/view/tesisuned:ED-Pg-CyEED-Pvtorres (accessed on 18 June 2019).
- Martos-Crespo, F. Guía Para la Atención educativa de los Alumnos y Alumnas con síndrome de Down, Granada. 2006. Available online: http://www.juntadeandalucia.es/averroes/centros-tic/11700123/helvia/sitio/upload/Guia_para_la_atencion_educativa_al_alumnado_con_sobredotacixn_intelectual.pdf (accessed on 18 June 2019).
- Sternberg, R.J. Thinking Styles; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Grover, S.; Pea, R. Computational thinking in K–12. Educ. Res. 2013, 42, 38–43. [Google Scholar] [CrossRef]
- Computer Science Teachers Association. CSTA K-12 Standards—Computer Science Standards. 2017. Available online: https://www.csteachers.org/page/about-csta-s-k-12-nbsp-standards (accessed on 6 May 2019).
- Habib, M. (Ed.) Advanced Online Education and Training Technologies; IGI Global: Hershey, PA, USA, 2019. [Google Scholar]
- Brennan, K.; Resnick, M. New frameworks for studying and assessing the development of computational thinking. In Proceedings of the 2012 Annual Meeting of the American Educational Research Association, Vancouver, BC, Canada, 13–17 April 2012. [Google Scholar]
- Resnick, M.; Maloney, J.; Monroy-Hernández, A.; Rusk, N.; Eastmond, E.; Brennan, K.; Millner, A.; Rosenbaum, E.; Silver, J.; Silverman, B.; et al. Scratch: Programming for all. Commun. ACM 52 2009, 52, 60–67. [Google Scholar]
- Brosterman, N.; Togashi, H.N. Inventing Kindergarten; Abrams: New York, NY, USA, 1997. [Google Scholar]
- Bers, M.U. Blocks to Robots: Learning with Technology in the Early Childhood Classroom; Teachers College Press: New York, NY, USA, 2008. [Google Scholar]
- Sullivan, A.; Bers, M.U. Robotics in the early childhood classroom: Learning outcomes from an 8-week robotics curriculum in pre-kindergarten through second grade. Int. J. Technol. Des. Educ. 2016, 26, 3–20. [Google Scholar] [CrossRef]
- Bers, M.U.; Flannery, L.; Kazakoff, E.R.; Sullivan, A. Computational thinking and tinkering: Exploration of an early childhoodrobotics curriculum. Comput. Educ. 2014, 72, 145–157. [Google Scholar] [CrossRef]
- Cejka, E.; Rogers, C.; Portsmore, M. Kindergarten robotics: Using robotics to motivate math, science, and engineering literacy in elementary school. Int. J. Eng. Educ. 2006, 22, 711. [Google Scholar]
- Wyeth, P. How young children learn to program with sensor, action, and logic blocks. J. Learn. Sci. 2008, 17, 517–550. [Google Scholar] [CrossRef]
- Kazakoff, E.R.; Sullivan, A.; Bers, M.U. The effect of a classroom-based intensive robotics and Programming workshop on sequencing ability in early childhood. Early Child. Educ. J. 2013, 41, 245–255. [Google Scholar] [CrossRef]
- National Association for the Education of Young Children; Clements, D.; Sarama, J. National association for the education of young children. Young Child. 2003, 58, 6. [Google Scholar]
- Hu, R.; Feng, J.; Lazar, J.; Kumin, L. Investigating input technologies for children and young adults with Down syndrome. Univ. Access Inf. Soc. 2013, 12, 89–104. [Google Scholar] [CrossRef]
- Bargagna, S.; Castro, E.; Cecchi, F.; Cioni, G.; Dario, P.; Dell’Omo, M.; Di Lieto, M.C.; Inguaggiato, E.; Martinelli, A.; Pecini, C.; et al. Educational robotics in down syndrome: A feasibility study. Technol. Knowl. Learn. 2018, 24, 315–323. [Google Scholar] [CrossRef]
- Taylor, M.S. Computer programming with Pre-K through first-grade students with intellectual disabilities. J. Spec. Educ. 2018, 52, 78–88. [Google Scholar] [CrossRef]
- Albo-Canals, J.; Martelo, A.B.; Relkin, E.; Hannon, D.; Heerink, M.; Heinemann, M.; Leidl, K.; Bers, M.U. A pilot study of the KIBO robot in children with severe ASD. Int. J. Soc. Robot. 2018, 10, 371–383. [Google Scholar] [CrossRef]
- González-González, C.; González, E.H.; Ruiz, L.M.; Infante-Moro, A.; Guzmán-Franco, M.D. Teaching computational thinking to down syndrome students. In Proceedings of the Sixth International Conference on Technological Ecosystems for Enhancing Multiculturality—TEEM’18, Salamanca, Spain, 24–26 October 2018; pp. 18–24. [Google Scholar]
- Given, L.M. The Sage Encyclopedia of Qualitative Research Methods; Sage Publications: London, UK, 2008. [Google Scholar]
- Preiss, G.; Friedrich, G. Mente y Cerebro; Prensa Cientiífica: Beijing, China, 2002; Volume 4. [Google Scholar]
- Picard, R.W. Affective computing: Challenges. Int. J. Hum. Comput. Stud. 2003, 59, 55–64. [Google Scholar] [CrossRef]
- Torres-Carrión, P.; González-González, C.; Carreño, A.M. Facial emotion analysis in Down’s syndrome children in classroom. In Proceedings of the ACM International Conference Proceeding Series, Interacción’15, Vilanova i la Geltrú, Spain, 7–9 September 2015. [Google Scholar]
- Torres-Carrión, P.; González-González, C.; Carreño, A.M. Methodology of emotional evaluation in education and rehabilitation activities for people with down syndrome. In Proceedings of the ACM International Conference Proceeding Series, Interaccion’14, Puerto de la Cruz, Tenerife, Spain, 10–12 September 2014. [Google Scholar]
- González-González, C. Emodiana: Un instrumento para la evaluación subjetiva de emociones en niños y niñas. In Proceedings of the Actas Del XIV Congreso Internacional de Interacción Persona-Ordenador, Madrid, Spain, 17–20 September 2013. [Google Scholar]
- Torres-Carrión, P.; González, C.S.G.; Barba-Guamán, L.R.; Torres-Torres, A.C. Experiencia afectiva de usuario (UAX): Modelo Desde Sensores Biométricos en aula de clase con Plataforma Gamificada de Interacción Gestual. 2017. Available online: https://riull.ull.es/xmlui/handle/915/6737 (accessed on 18 June 2019).
- Bers, M.U. KIBO. In Coding as a Playground; Routledge: London, UK, 2017; pp. 135–162. [Google Scholar]




| P | ChA | CgA | Sex | Content |
|---|---|---|---|---|
| 1 | 10 | 6 | M | Language integrated with programming and computational thinking. |
| 2 | 7 | 5 | F | Language integrated with programming and computational thinking. |
| 3 | 11 | 5-6 | M | Speech therapy integrated with programming and computational thinking. |
| 4 | 19 | 3-4 | M | Speech therapy integrated with programming and computational thinking *. |
| 5 | 13 | 6 | F | Mathematics integrated with programming and computational thinking. |
| 6 | 15 | 6 | F | Speech therapy session integrated with programming and computational thinking. |
| 7 | 14 | 3-4 | M | Mathematics integrated with programming and computational thinking. |
| Name | Characteristics | Description | CT Abilities |
|---|---|---|---|
| I’m a robot | Type: Introduction Robotic focus: Introduction to engineering and robotics Duration: 20′ Goals: ● Learn about KIBO and each of its elements. Contents: ●Knowledge of the robot and its operation. ● Basic program sequences Materials: ● KIBO robot ● Sheet with images of robots | To introduce the topic, we asked the following questions: What is a robot? Do you know what a robot does? Have you ever seen a robot? We then showed them a sheet with different images of robots, explaining how each robot is as different as people are and, therefore, have different skills and different ways of communicating, like people do (English, Spanish, French, sign language, etc.). The sheet contains an image of KIBO and, to encourage the surprise factor, we asked some questions about it and focused our comments on it, before telling them that they will be able to meet KIBO soon. We then introduced KIBO in the session. We explained each of the parts of KIBO and the functions that correspond to them, as well as the wooden blocks, which are the language that KIBO uses. Over the course of the explanation, we implemented some simple programming sequences while interacting with the students, so that they could also program KIBO. | CT1, CT4 |
| See how I program you! | Type: Language Robotic focus: Introduction to what a program is Duration: 20′ Goals: ● Interpret visual patterns through the KIBO programming language. ● Program the partner or monitor through the cards. ● Program KIBO to execute the messages. Contents: ●Knowledge of the programming language. Materials: ● KIBO robot ● Sheet with images of the activity | We showed cards with images similar to the KIBO language (start, blue light bulb, spinner, arrows, etc.). The participants had to use them to create a programming sequence on the table, so that later the partner or monitor could interpret them. Then it would be the turn of the monitor or partner, and several sequences would be programmed. Then we used some of the sequences that we liked the most, which would be interpreted and transformed into KIBO’s language (using its wooden blocks). | CT2, CT3, CT4, CT5, CT6 |
| KIBO, move the skeleton! | Type: Music/Body knowledge Robotic focus: Introduction to sensing and sensors Duration: 30′ Goals: ● Program the robot to execute the indicated movements. ● Enhance learning by discovery. Contents: ●Knowledge of the programming language. Materials: ● KIBO robot | We reviewed the parts of KIBO, compared with the five human senses and locomotion. We were then going to start programming with the wooden blocks. To do so, the participants had to decide the movements that they wanted KIBO to do, as if we were choreographing KIBO to move in response to selected music. As a group, we commented on the blocks that we needed to make the robot come alive in the appropriate way, before implementing the sequence with KIBO. We repeated several choreographies. We compared our body with KIBO’s elements and movements. | CT1, CT2, CT3, CT4, CT5, CT6 |
| Follow me! | Type: Attention and auditory memory. Robotic focus: Sensing and introduction to repeats Duration: 15′ Goals: ● Repetition of auditory sequences ● Visual and auditory identification of KIBO wood blocks ● Program the sequence that has been repeated through KIBO. Contents: ● Identify different blocks in the KIBO programming language. Materials: ● KIBO robot | We reviewed what a sensor is and compared it with the human senses. We talked about the meaning of repeat. We listened to and repeated a KIBO language sequence: “Turn, one step forward and two steps back”, and then identified it with the wooden blocks and layed out the sequence. To finish, we programed KIBO to interpret our sequence. We programmed different sequences, making them longer, simpler or more complex, to match the student’s characteristics. | CT1, CT2, CT3, CT4, CT5, CT6 |
| He eats numbers | Type: Mathematics Robotic focus: Repeat with numbers Duration: 30′ Goals: ● Continue the series of numbers indicated. ● Program KIBO to reach each of the numbers we need. Contents: ●Knowledge of the programming language. ● Sequencing, series Materials: ● KIBO robot ● Different numbers in folio size. | We placed different numbers on a table, forming an incomplete series, for example: 2, X, 6, X, 10 (indicating to the participant that the series was obtained by adding 2 to each previous number). Once the incomplete series was laid out, we distributed several numbers in the space, which matched (or did not match) those needed to complete our series. The participant had to program KIBO to reach each number it needed to select to complete the series. We programmed KIBO to travel around different numbers using repeats. | CT2, CT3, CT4, CT5, CT6 |
| Participant | CT Abilities Observed |
|---|---|
| 1 | Session 1. Diagnosis and familiarization. Student initiated in reading and writing and logical-mathematical thinking. Vague knowledge of robots from cartoons and movies. Correctly processed the information, but had problems organizing it logically. Was sometimes able to distinguish between elements or objects with the same property. Session 2. Introduction to robotics and programming. Was attentive to the presentation of the robot and responded correctly to questions about the KIBO robot by asking questions about its elements and operation. After a simple explanation of how the KIBO scanner processes the codes, was consistently able to do it by himself, managing to control the distance to the scanner, which sometimes complicated the reading. Was not able to distinguish at all between the different programming blocks, confusing them at times, which resulted in incomplete knowledge of the robot’s programming language. Session 3. Programming and curriculum. Remembered the operation of the robot and how to program it. We worked on activities related to language in which the participant had to select a word with an action and then program the robot to perform that action. In addition to the action requested, the participant added other actions that amused him (for example, turning on the light bulb). A positive evolution was observed in terms of problem solving and programming. |
| 2 | Session 1. Diagnosis and familiarization. Was easily distracted. Only rarely did she organize and analyze the information received. Had problems distinguishing objects and/or elements from among properties. Was introduced to reading–writing and mathematical/logical thinking. Session 2. Introduction to robotics and programming. Had not heard of robots before. Did not make any comments or ask questions about how KIBO works. She was very enthusiastic about combining the different blocks, trying to incorporate as many as possible, with no prior instruction or intention. The participant did not want to receive help as to how to read the blocks with the scanner on the robot, indicating that she wanted to do it herself. She was also not receptive to asking questions related to the order of the actions she wanted KIBO to perform. Showed no interest in programming the robot to carry out an activity in a specific way. Not quite able to distinguish between the different programming blocks. Showed no effort to understand the KIBO language. Session 3. Programming and curriculum. Remembered KIBO and showed great enthusiasm about working with it again, although she had some problems remembering all of KIBO’s parts and how they worked. In programming, she focused on joining the blocks in no logical order. With the help of the teacher in the activity of reading the sentences, she was able to relate the image with the action to be performed. In programming, added unnecessary blocks that distorted the path of the robot. |
| 3 | Session 1. Diagnosis and familiarization. Little desire to participate. The participant did not have verbal fluency and had problems expressing needs or thoughts. The speech therapist used sign language to reinforce communication with him. Based on the indications provided by the speech therapist, we can state that he is being introduced to reading–writing and to mathematical/logical thought. Session 2. Introduction to robotics and programming. Showed considerable interest in the robot and its operation. The speech therapist’s support was required to communicate with the participant. Closed questions were asked about the actions he wanted KIBO to execute and the student had to program the robot to do them. The light on KIBO’s scanner distracted him, which made it difficult for him to handle the wooden programming blocks. With help, the student was able to perform basic programming sequences. There was a positive evolution in his knowledge of the robot, but he did not exhibit an interest in the activities proposed. He was not interested in programming the robot to perform a given action and did not try to understand the programming language. Session 3. Programming and curriculum. The participant remembered the name of the robot and on the days when we were not present, he asked his teacher about KIBO. The student did not show any interest in performing the activities. Since he was practicing blowing as part of his speech therapy, the activity was adapted by placing a series of pens on the platform with KIBO that the student had to try to knock down by blowing as KIBO turned. He would later count the pens that had fallen on the table. To do this, he had to program the robot to turn around five times. With help, the student was able to program KIBO to carry out the activity. |
| 4 | Session 1. Diagnosis and familiarization. The student was easily distracted, and did not engage in mathematical logical thinking or respond favorably to literacy. Session 2. Introduction to robotics and programming. The student was very attentive to the explanation of the robot and its operation and surprised by how he could communicate what he wanted the robot to do through the wooden blocks. Despite his interest, he failed to distinguish between the different programming blocks and did not fully understand KIBO’s language. Session 3. Programming and curriculum. The student remembered very little of what had been worked on in the previous session; therefore, all of the programming elements and methods had to be reviewed. The activity included the employment of a handicraft (rubber hand) that was used in the KIBO platform and social actions, such as hand greetings and movements of the robot. The student had difficulties carrying out the programming sequences autonomously. |
| 5 | Session 1. Diagnosis and familiarization. The student was very attentive, curious, and able to self-correct. The student organized the information she received and analyzed it logically. She was also able to distinguish between objects of a property and responded favorably to the process of reading, writing, and logical mathematical thinking, typical of her cognitive age. She had no knowledge of what a robot is. Session 2. Introduction to robotics and programming. The student was very attentive and anticipated the elements and operation of KIBO through questions. The activity consisted of performing different choreographies to make KIBO dance. The participant mastered the placement of the blocks from the time it was explained to her and she enjoyed the proposed activities, demanding new variants. She was able to interact correctly with the robot and distinguish programming blocks. Session 3. Programming and curriculum. The student remembered KIBO and its operation. She programmed different sequences related to mathematics (time, series of numbers) and a game with dice and KIBO movements. She was able to program KIBO autonomously and satisfied the objectives of the activity. |
| 6 | Session 1. Diagnosis and familiarization. She was shy and worried excessively about failing. She organized the information received and analyzed it logically. She too was capable of distinguishing objects between properties and was being initiated in the process of reading and writing and mathematical logical thinking. Of note is the fact that she read sentences with the support of pictograms. Session 2. Introduction to robotics and programming. She was attentive to the explanation and performed the activity of creating a basic programming sequence successfully. She was autonomous and offered help to her partner programming KIBO. She exhibited some problems distinguishing between the different programming blocks. Session 3. Programming and curriculum. She remembered KIBO and how it worked. We worked on her auditory attention and memory by dictating the programming sequences that had to be built with the wooden blocks. As the complexity of the sequences was increased, the participant carried out the activities in an exemplary way, accurately creating the sequences. The next activity was related to reading, and the participant had to read a set of sentences and associate them with KIBO pictograms and actions. In this second activity, the participant had problems reading sentences, but not programming KIBO, which she did correctly. |
| 7 | Session 1. Diagnosis and familiarization. At first, the participant was timid, but then he gained proficiency. The student was initiated in literacy, supported by pictograms, and mathematical logical thinking, but exhibited problems recognizing objects between properties. He knew what a robot was from seeing them in movies. Session 2. Introduction to robotics and programming. The student was very participative, interested in the different functions the robot had, and interacting during the explanation. In the activity, he had to read and interpret the sequence to be programmed with his own body and then program KIBO. He had some problems programming KIBO by himself. He was not always interested in programming the robot to perform a specific action and did not try to understand its language; therefore, he could not distinguish between the different programming blocks. Session 3. Programming and curriculum. The attention and auditory memory activity was carried out, in which simple sequences to be programmed were dictated. The student did not exhibit difficulties with the programming of simple sequences. He was able to read the barcodes on the blocks autonomously, but he needed help creating the sequences. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-González, C.S.; Herrera-González, E.; Moreno-Ruiz, L.; Reyes-Alonso, N.; Hernández-Morales, S.; Guzmán-Franco, M.D.; Infante-Moro, A. Computational Thinking and Down Syndrome: An Exploratory Study Using the KIBO Robot. Informatics 2019, 6, 25. https://doi.org/10.3390/informatics6020025
González-González CS, Herrera-González E, Moreno-Ruiz L, Reyes-Alonso N, Hernández-Morales S, Guzmán-Franco MD, Infante-Moro A. Computational Thinking and Down Syndrome: An Exploratory Study Using the KIBO Robot. Informatics. 2019; 6(2):25. https://doi.org/10.3390/informatics6020025
Chicago/Turabian StyleGonzález-González, Carina S., Erika Herrera-González, Lorenzo Moreno-Ruiz, Nuria Reyes-Alonso, Selene Hernández-Morales, María D. Guzmán-Franco, and Alfonso Infante-Moro. 2019. "Computational Thinking and Down Syndrome: An Exploratory Study Using the KIBO Robot" Informatics 6, no. 2: 25. https://doi.org/10.3390/informatics6020025
APA StyleGonzález-González, C. S., Herrera-González, E., Moreno-Ruiz, L., Reyes-Alonso, N., Hernández-Morales, S., Guzmán-Franco, M. D., & Infante-Moro, A. (2019). Computational Thinking and Down Syndrome: An Exploratory Study Using the KIBO Robot. Informatics, 6(2), 25. https://doi.org/10.3390/informatics6020025