Abstract
Computational thinking and coding are key competencies in the 21st century. People with Down syndrome need to be part of this new literacy. For this reason, in this work, we present an exploratory study carried out with students with Down syndrome with cognitive ages of 3–6 years old using a tangible robot We applied the observational method during the sessions to analyze the participants’ emotional states, engagement, and comprehension of the programming sequences. Results show that people with cognitive disabilities can acquire basic programming and computational skills using tangible robots such as KIBO.
1. Introduction
Programming is seen as a key skill in the 21st century and a new literacy [1,2,3,4]. In the same way that, in past centuries, it was necessary for citizens to learn to write, in the 21st century it is necessary that citizens learn to code or program to be digital producers of information, not just digital consumers of it [5]. In this regard, the European Digital Agenda considers that “coding is today’s literacy and helps to practice 21st century skills, such as problem solving, teamwork and analytical thinking” [6]. In addition, the European Digital Agenda deems the acquisition of digital competences essential to sustain economic development and competitiveness [6].
As a result, the term “computational thinking” has recently gained interest in the academic world, although its beginnings date back to the 1960’s, with S. Papert and his constructionist approach to the LOGO programming language, which allowed students to create their own problem solving processes [7,8]. Janet Wing [9] recuperated the concept of computational thinking and defined it as a mixture between different forms of thought for solving problems (engineering, mathematical, scientific) through formal abstraction and a real and everyday world approach. Thus, Wing defined computational thinking as “solving problems, designing systems, and understanding human behavior using the fundamental concepts of computing” [9]. The interest in this term continues to grow, as does the number of initiatives to promote its effective introduction in schools [10,11,12,13,14].
Coding, programming, and computational thinking constitute a way for people to express and share their ideas [15]. In this sense, these skills can be integrated into almost any class activity, with or without technology, as a new literacy and a new way of thinking, integrated with other parts of the curriculum.
Furthermore, educational robotics is a didactic approach that can be integrated into different educational environments [16]. This integration can be done through the use of programmable robotic devices and the application of project-based learning methodologies. The acquisition knowledge process can be improved through research and experimentation [17]. Robots can be used as physical tools for the development of cognitive skills through play, creativity, and the resolution of challenges [8]. Interaction with robots occurs physically when children manipulate the tool itself, play with it, and observe its movements [18]. Robots have appealing features and functions for children that able to maintain children’s attention for a longer period of time, improving their performance, their ability to concentrate, and their cognitive flexibility, but it has also been found that a robot alone is not motivational enough [19]. The motivation for the use of the tool emerges from the activity, the problem or challenge to be solved, or from the story that the children represent using the robot [20]. For example, converting a robot into a character with a mission to fulfill or a role to embody engages children in different types of activities, offering them the opportunity to explore the possibilities of the environment [21].
If the motivation for children to use a robotic tool is born of the challenge to achieve, it is possible to take advantage of this great opportunity to create learning environments and situations with clear curricular objectives, through which children feel strongly attracted and committed, encouraging their curiosity, creativity, and active participation, and in which they have an opportunity to build their own learning, enriching the experience while gaining digital and computational skills [4]. Furthermore, robots can also be very helpful in the teaching-learning of programming and computational thinking at a young age [22].
As we mentioned above, coding, programming, and computational thinking constitute a new literacy, and it is essential to start integrating computer literacy for all citizens, including those with special needs, such as people with Down syndrome (DS) [23,24]. Just as past people with DS started to learn mathematics [25,26], nowadays it is time to start teaching them the same computational skills as the rest of 21st century society. Some of the primary skills that can be achieved by working with robotics include problem solving, reasoning, and planning. People with DS have the same learning goals as other students, the difference being that they are slower to learn and need more individualized and personalized teaching [25]. For this reason, it is necessary to adopt pedagogical practices and resources that allow us to address and develop their skills based on their individual goals and capacities [27].
According to Nadel [23], Down syndrome is caused by a genetic alteration in people who have 47 chromosomes instead of the usual 46 (trisomy on chromosome 21). Brain digenesis is responsible for intellectual disability, which influences their ability to emit and articulate words.
Every person with Down syndrome is unique, so each person with DS can exhibit different learning characteristics to varying degrees. Thus, every situation and every student is different, but there is extensive, well-documented evidence on teaching approaches that have a positive impact on learning for students with Down syndrome [28]. We thus need to consider the needs and learning styles of each person with DS [29], taking into account an overall perspective of the individual, attending to their personal, social, and family needs [30,31]. It is also necessary to determine the specific cognitive characteristics of students with DS, which according to Martos-Crespo [29] are the following:
- They process and organize information slowly, with difficulty.
- They present a deficit in short-term memory, both auditory and visual; however, they capture information better by the visual channel than by the auditory one.
- Their receptive-comprehensive capacity is clearly superior to the expressive one.
- They learn faster by watching their classmates and imitating their responses.
- They work on an activity until they achieve what they propose.
- They have problems generalizing their knowledge to other situations.
- They have difficulties with language, both in the articulation and acquisition of new vocabulary.
These characteristics have been summarized and generalized, but each person with DS can have different degrees of disabilities. Thus, it is necessary to consider each case individually and adapt the educational processes accordingly. Research shows that children and young people with DS can improve their learning and skills with appropriate teaching strategies and social environments [16]. For this reason, our research has created activities adapted to each particular student with DS.
In light of the importance of computer literacy for all citizens, including people with special needs, in this study we explore if KIBO robot engages and promotes the learning of basic programming and computational thinking skills in students with DS. The main research questions of this exploratory study are:
- Do students with DS and cognitive levels from ages 3 to 6 engage with the KIBO robot in a 1:1 or 1:2 class, as measured by their attention span, interest, motivation, and positive emotions?
- Can students with DS code with KIBO, as measured by their degree of understanding the sequences and programming?
- How does KIBO affect the emotional behavior of students with DS, as measured through the emotions observed during their interactions with the robot?
2. Related Works
2.1. Computational Thinking Abilities
The definition of Computational Thinking (CT) incorporates a set of associated abilities, but there is no consensus of these abilities to date. According to the Computer Science Teachers Association and the International Society for Technology in Education, CT is a problem-solving process that involves different abilities, such as formulating problems in a way that makes it possible to use a computer and other machines to solve them; logically organizing and analyzing data; representing data through abstractions, such as models and simulations; automating solutions through algorithmic thinking (a series of discrete and ordered steps); identifying, analyzing, and implementing possible solutions in order to achieve the most effective and efficient combination of steps and resources; and generalizing and transferring this problem solving process to a wide variety of problems [32]. Google also defines a set of abilities associated with CT, such as: decomposition of a problem or task into discrete steps; recognition of patterns (regularities); generalization of such patterns and abstraction (discover the laws or principles that said patterns); and algorithmic design (develop precise instructions to solve the problem and its analogues) [33]. Grover and Pea [31] define CT as a set of skills, such as the abstraction and generalization of patterns (including models and simulations); systematic processing of information; symbolic systems and representations, including algorithmic notions (control flow diagrams), structured problem decomposition (modularization), iterative, recursive and parallel thinking, conditional logic, efficiency and performance, and deep and systematic error detection. Brennan and Resnick [34] define three dimensions of CT: (a) those that programmers use when creating programs that are applicable to other contexts, whether they involve programming or not (sequences, cycles, parallelisms, events, conditional, operators and data); (b) computational practices, those that are used when programming and that focus on how, not what, one is learning (iteration, testing and debugging, reusing and remixing, abstracting and modulating); and (c) computational perspectives, which users build on themselves, and their environment through programming (express, connect, and ask). Bers [3] proposes the “powerful ideas” of CT, such as algorithms (sequencing/order, logical organization); modularity (breaking up a larger task into smaller parts, instructions), control structures (recognizing patterns and repetition, cause and effect), representation (symbolic representation, models); hardware/software (smart objects are not magical, objects are human engineered); design process (problem solving, perseverance, editing/revision); and debugging (identifying problems, problem solving, perseverance). These different CT abilities can be developed with tangible robotics, such as KIBO. For example, children can arrange a sequence of blocks to build a program (algorithm), use a repeat block instead to scan a large number of blocks (modularity), or recognize the begin and end blocks to build a program (control structures), among other abilities related to CT.
2.2. CT, Robotics and Cognitive Disabilities
New robotics kits have evolved to become the modern generation of learning manipulatives that help children develop a stronger understanding of mathematical concepts, such as number, size, and shape, in much the same way that traditional materials like pattern blocks, beads, and balls once did [35,36,37]. Unlike many digital games developed for children, building with robotics does not typically involve sitting alone in front of a screen [38]. Previous research has shown that children as young as three years old can build and program simple robotics projects [39,40,41,42]. Additionally, robotic manipulatives allow children to work on skills that are important for healthy child development, such as fine motor skills and hand-eye coordination [43], while also engaging in collaboration and teamwork. Additionally, robotics and programming allows children to exercise meta-cognitive, problem-solving, and reasoning skills [44].
Some recent studies have demonstrated the feasibility of teaching basic programming skills and uses of educational robotics as an effective learning resource [1,45]. It has been demonstrated that educational robots promote superior cognitive functions, like executive functions involved in problem solving, such as reasoning and planning, in typically developing preschool children [45]. We will mention two studies related with DS and computational thinking. Taylor et al. [46] presented a single case study to explore the feasibility of teaching basic computer programming skills to early elementary students with Down syndrome. They used evidence-based practices (i.e., explicit instruction), physical manipulatives, and a robot. Another study [45] examined the feasibility of promoting executive functions in people with DS using the Bee-Bot robot. Qualitative results on two children were presented and discussed, indicating that the robot promoted their interest, attention, and interaction with adults and peers, though executive functions were only enhanced in one child. Another related work that explores the feasibility of using KIBO with special-needs individuals was conducted by [47]. They studied the feasibility of using KIBO to improve the social interactions and emotional states of children with severe Autism spectrum disorder (ASD). Results shows that, although participants demonstrated a limited understanding of programming concepts, the KIBO robot yielded a positive impact on their social interactions.
Taking into consideration previous findings, in this study we explore the feasibility of using a robotic platform called KIBO to allow persons with DS to learn programming and computational thinking [39].
3. Materials and Methods
3.1. Overview
The pilot study was carried out in the Tenerife Down Association, Tenerife, Spain during five weeks from April to May of 2018 in the students’ regular classrooms. Before the start of the pilot exploratory case study, we conducted a training session on KIBO with the professionals of the Tenerife Down Association [48]. The study was then approved by the board of the Tenerife Down Association. After that, we contacted the professionals interested in participating in the study and selected the students with them. An informed consent was then sent to the student’s families. Seven participants diagnosed with DS aged between 7 and 19 years old (cognitive ages of 3 to 6 years) and two tutors participated during the sessions. The information on the curricular level of the students and their profile was provided by the tutors. The methodology selected to conduct the research was the exploratory case study, according to each participant’s specific needs and personalized attention requirements. We also wanted to understand the phenomenon to generate ideas for a further hypothesis [49]. We collected qualitative data using the observational method to assess the emotions, attitudes, and programming skills developed by the students in the sessions using different rubrics (Appendix A). We also interviewed the tutors to ascertain their views on including robots in their classroom, if they consider the inclusion of robots, coding and computational thinking to be of interest to students with Down syndrome, the integration with other learning objectives, and their perception of the participants’ learning. Then, we coded and analyzed the data collected by the qualitative instruments.
Regarding the assessment of emotions in educational settings, researchers from the Human Computer Interaction area recognize the importance of the student’s emotional state in the learning process [50], [51]. As the main goal, researchers want to know how a student is feeling in the classroom in order to produce significant learning [52]. González et al. [53] propose different methods and techniques to evaluate the emotional state of children, such as facial expressions, and subjective measures of sentiment through questionnaires, interviews, and self-reports, using a multidimensional categorical approach. These authors propose the following types of instruments for emotional assessment:
- Verbal: Likert scale or semantic difference to classify emotions; standard emotional profile (SEP), reaction profile, attitude towards ad scale.
- Non-verbal: PrEmo, EmoCards, SAM, LemTool o GEW.
- Facial expressions: Affdex SDK, Facial Coding, FaceAPI, FaceSense, FaceReader, FaceSDK.
- Brain signals: Emotiv-EPOC.
- Biometrics: Wearables for emotional assessment.
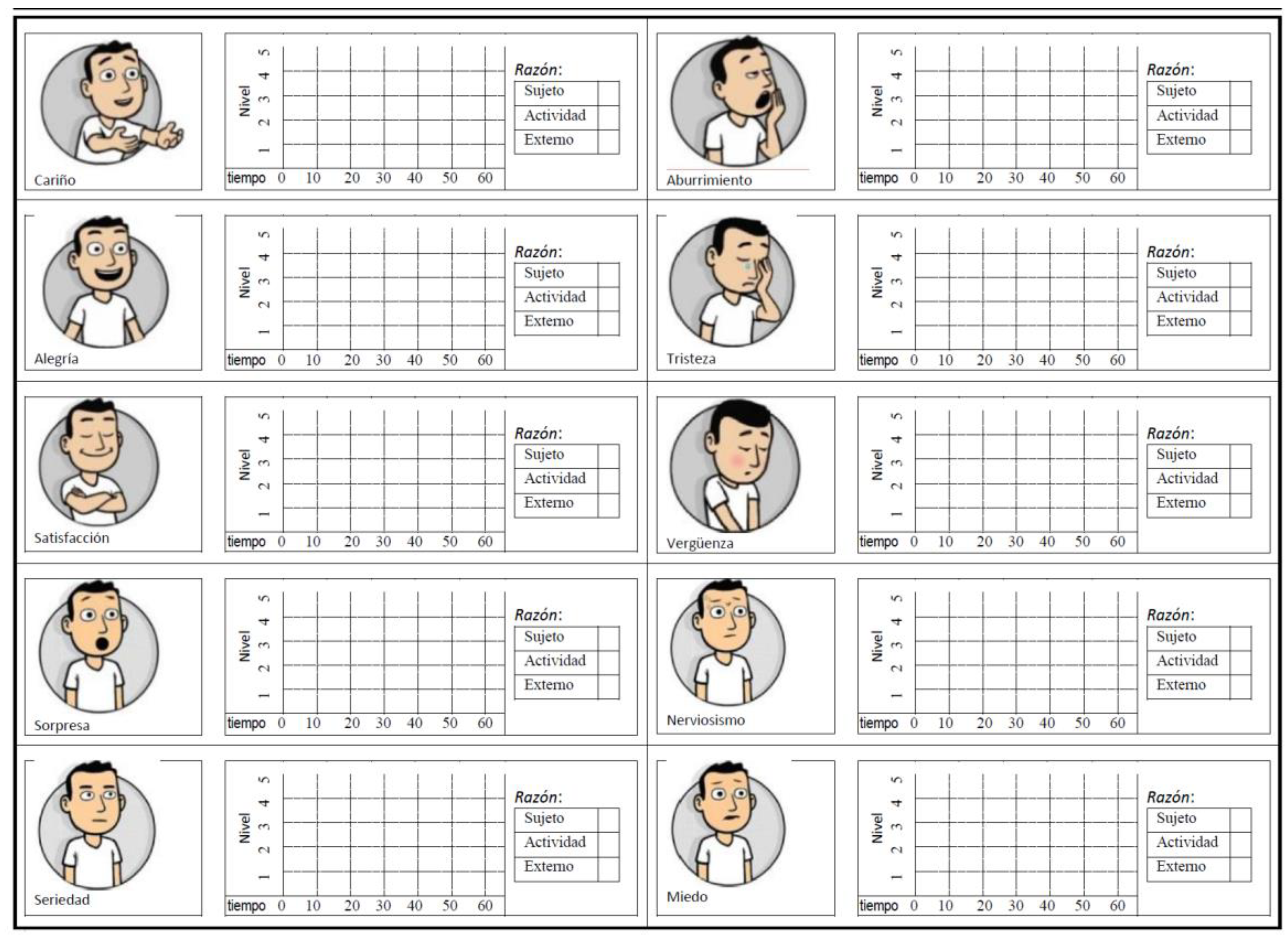
In this work, we selected a subjective emotional assessment instrument called EMODIANA [54]. This instrument portrays ten principal emotions: love, joy, satisfaction, surprise, nervousness, shame, sadness, and fear. The EMODIANA can measure not only the emotion, but also its intensity. In particular, we used an EMODIANA adapted for DS that allows the observer to register the different emotions of a student during a session (Figure 1) [52]. This instrument can be used directly during the session or to analyze recorded videos of a session [55]. After that, it is possible to classify the emotions into positive, negative, and neutral emotions.
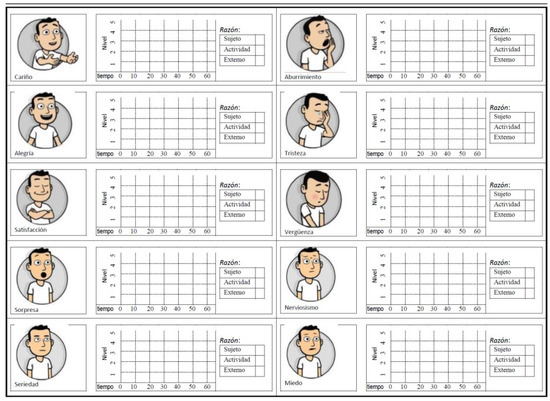
Figure 1.
Observational instrument for evaluating emotions in educational contexts [55].
3.2. Participants
The study participants were seven students (3 women and 4 men) with chronological ages between 7 and 19 years. It should be noted that the cognitive ages of the participants did not correspond to their chronological ages, meaning some of the older participants had lower cognitive levels than those of the lower chronological ages. The contents and activities involved were adapted to the particular needs of each participant and were developed by the tutors and professionals in charge of each participant’s education. Table 1 describes the characteristics of each participant.

Table 1.
Description of participants, where P: Participants; ChA: Chronological Age and CgA: Cognitive Age, and the content to be taught.
3.3. Robotic Technology
This study utilizes the KIBO robotics kit, created by the Developmental Technologies Research Group at Tufts University through funding from the National Science Foundation (NSF). KIBO is a robotics construction kit that involves hardware (the robot itself) and software (tangible programming blocks) used to make the robot move. KIBO is unique because it is explicitly designed to meet the developmental needs of young children. The kit contains easy to connect construction materials, including wheels, motors, light output, and a variety of sensors (See Figure 2).

Figure 2.
KIBO robot with sensors and light output attached.
KIBO is programmed to move using interlocking wooden programming blocks (see Figure 3). These wooden blocks contain no embedded electronics or digital components. Instead, KIBO has a scanner embedded in the robot. This scanner allows users to scan the barcodes on the programming blocks and send a program to their robot instantaneously. No computer, tablet, or other form of “screen-time” is required to learn programming with KIBO. This is in keeping with the American Academy of Pediatrics’ recommendation that young children have a limited amount of screen time per day [36]. KIBO’s block language contains a total of 18 different individual programming blocks for children to learn, with many increasingly complex programming concepts that can be introduced, including repeat loops, conditional statements, and nesting statements.

Figure 3.
Blocks for programming KIBO and a sample KIBO program. This program tells the robot to spin, shake, move backward, move forward, and turn a red light on.
In addition to these robotic and programming components, the KIBO kit also contains art platforms that can be used by children to personalize their projects with crafts materials and foster STEAM integration.
The KIBO robotic kit was chosen for this study for several reasons. First, as mentioned, KIBO is designed specifically for a target population of children aged 4–7 years old, allowing them to engage with computer science concepts in a way that is developmentally appropriate [4,39,56]. The kit, therefore, innately reduces both the complexities of manipulation and coding comprehension. In addition, to program the robot, the KIBO kit relies on wooden blocks that are easily recognized and manipulated. Further, KIBO is a tangible, screen-free robotic platform with an easy visual interface that can potentially promote face-to-face interactions with teachers and peers. Also, KIBO is different from other available robotic kits in that it does not require screen time on a separate computer. Programming is accomplished by connecting tangible wooden blocks that children assemble in a sequence to provide a set of instructions to the KIBO robot. Each block is color-coded and labeled with an action or instruction that tells the robot what to do. After a sequence is built, starting with a “Begin” block and ending with an “End” block, children can program the robot by scanning the set of blocks in sequence using the KIBO’s built-in barcode scanner. Children then simply push a button to see the robot perform the program they created. The robot has slots for up to four sensors that can be assembled and dissembled to add or subtract functionality.
3.4. Activities
We designed activities that were adapted to the participants based on their curriculum level. The contents related to computational thinking and coding were also integrated into the current subject that each participant was working on at that particular time in the course, and which the teacher considered was most relevant to the student.
In total, 23 activities were designed with different durations, from 15 to 30 min. Thus, a one-hour session was organized with 2 to 4 activities, depending on the case. Some examples of different types of activities are shown in Table 2.
Table 2.
Examples of different activities carried out with children.
The first activity common to all participants was the introduction to KIBO. The main goal of this activity was to introduce the robot, each of its elements, and how it works. In this session, the participants also learned how to program a basic sequence with KIBO (Figure 4 and Figure 5). This session lasted 20 min.

Figure 4.
Student with Down syndrome creating a basic program sequence.

Figure 5.
Student with DS scanning a basic sequence to move KIBO.
Other KIBO activities involved curricula, such as mathematics (numbers and basic operations) or language (lexical/semantic/phrases), and other functional contents or cognitive/speech therapy, like emotional knowledge, social relations, timing, attention and auditory memory, and knowledge of the body.
3.5. Sessions
The sessions included an initial familiarization and diagnosis session, where the researcher observed what content they were working on and how they learn it without KIBO. This first session was necessary to observe the curricular level that was being worked on in the classroom, as well as the response of each student in the group of students, their different capacities, and their attitudes. We also received different indications on the level of each participant and recommendations, such as the type of writing they are currently able to read, the operations and ways in which they could be done, and other specifics to consider in order to design activities with KIBO successfully.
In the second session, we introduced the KIBO robot and its programing in the classroom to all of the participants. To do so, we implemented several presentation activities that we had previously prepared. These activities considered KIBO’s multiple functions, its programming language through wooden blocks, and how it communicates. Over the course of these sessions, we compiled a progress record of the different emotions of the students, as well as a corresponding evaluation of their programming and computational thinking skills.
By considering the response of each student during the previous sessions, we designed activities that aimed to arouse in each one of them an interest and enthusiasm in programming KIBO. To do this, as mentioned earlier, we relied on activities suited to the curricular level of each as a guide. Thus, in the third session, activities related to their curriculum and/or therapy were carried out with KIBO. We, therefore, worked with both content types, which related to computational thinking and programming and corresponded to the adapted curriculum. The sessions had different degrees of success for each participant. We analyzed the results later, but in general this third session was completed without difficulties and with great acceptance by the participants. We used different evaluation instruments to assess the session.
Finally, we conducted interviews with the tutors to determine their own assessments of their students’ learning, as well as other aspects of the intervention.
3.6. Data Collection and Analysis
A KIBO expert on the research team led each session, explaining each activity and the schedule of events. The expert collaborated with the regular teachers to conduct each day’s sessions. At the end of each session, the research team had a debriefing to review what had happened.
We collected information using the following methods: (1) video recordings of all the sessions; (2) observational checklists on emotions and computational thinking skills; (3) assessment rubrics and notes that were taken during and after the sessions; and (4) interviews with teachers at the end of intervention. For a more detailed analysis, the video data was coded and analyzed with ratings by an independent observer. Appendix 1 presents the assessment rubrics used in this study.
In the first intervention session, we observed the contact with the robot, the motivation, involvement and disposition towards KIBO and the proposed activities. An assessment rubric was provided to indicate if the participants complied with the items proposed.
In the second intervention session, we assessed each participant’s progress through observation, using a record similar to that employed in the previous sessions. In addition, we evaluated the emotions exhibited over the course of the sessions.
At the end of the intervention, we conducted an open interview with two of the professionals responsible for teaching the participants on different aspects of the pilot study. In their entirety, the records generated reliable and valid information for issuing value judgments that support the evaluation, and allowed us to determine the results of implementing the activities, as well as the effectiveness of introducing tangible robotics (in this case, KIBO) to the various participants. They also highlighted the drawbacks encountered in the robot application process.
4. Results
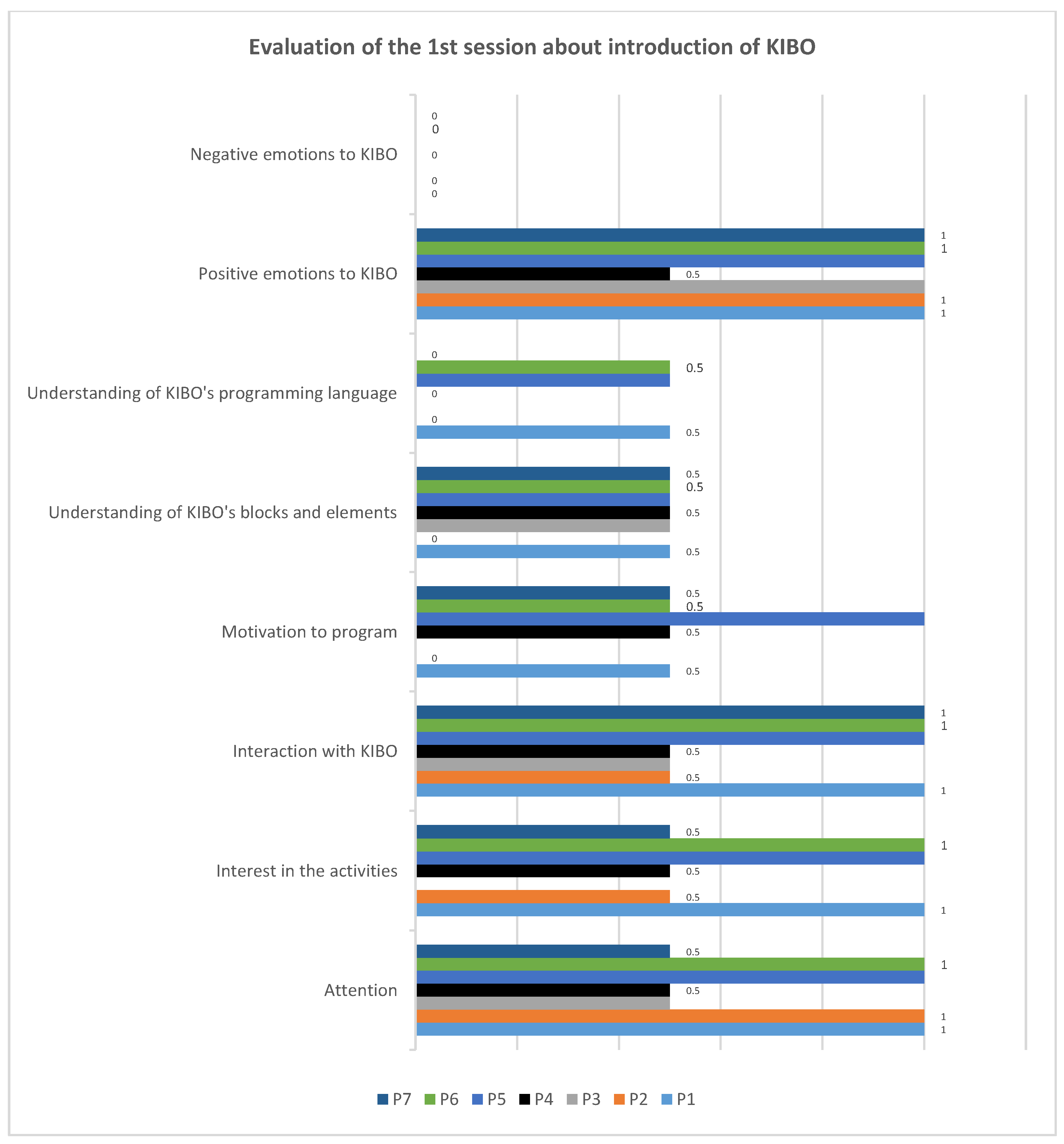
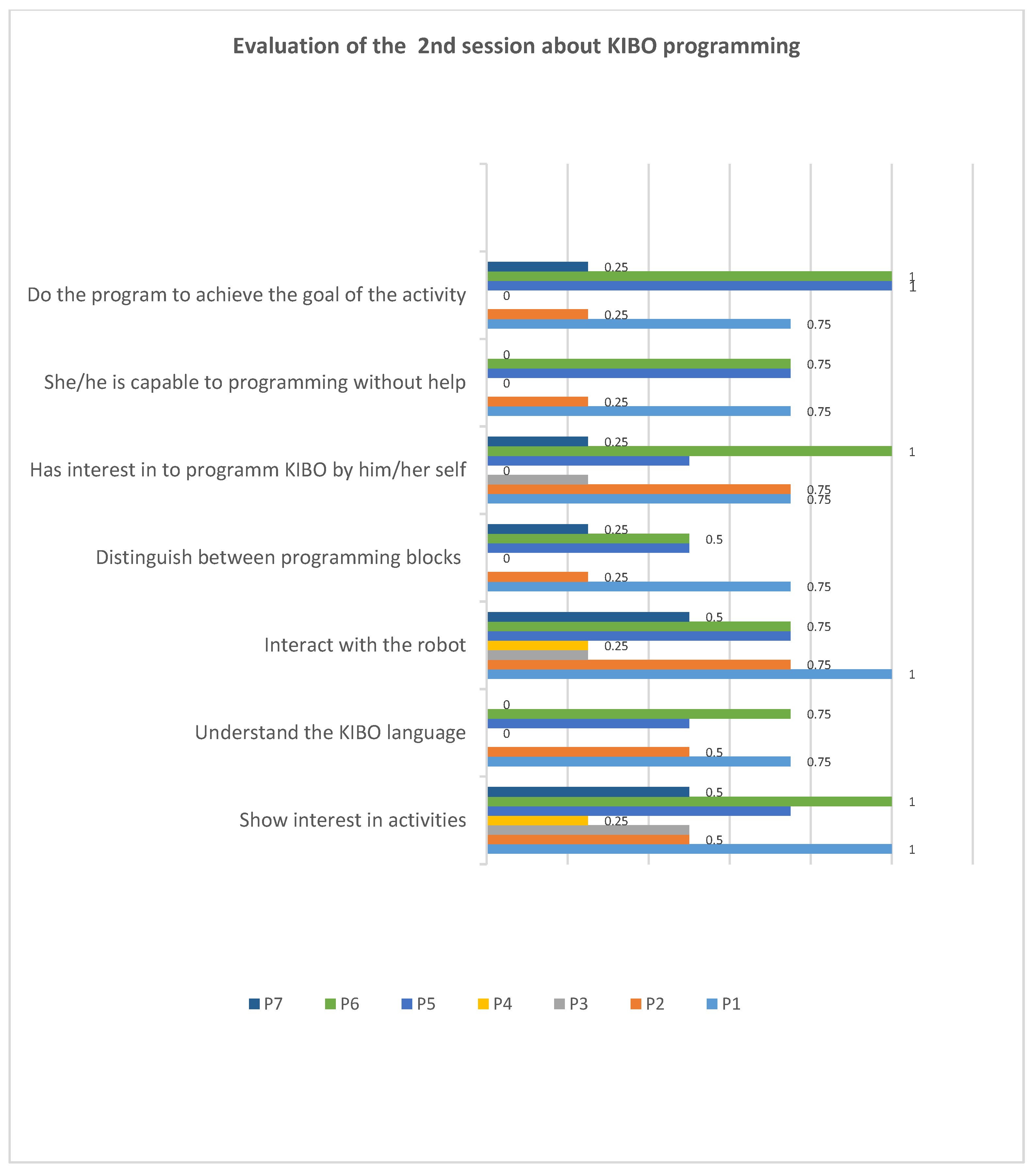
In this section, we present the main results of this pilot study and answer the research questions. Regarding the research question of this pilot study, “Do students with DS engage with the KIBO robot? (degree of motivation)”, the results showed a positive engagement impact. The interest in the activities was high (1) in 3 participants and medium in the other 3 (0.5). The programming motivation was medium (0,5) in 4 participants and high in one (1), and every participant interacted with KIBO satisfactorily. On the question “Can DS students code with KIBO? (degree of comprehension of the sequences and programming)”, we observed that except for two students, five understood KIBO’s blocks and elements and were able to program basic sequences to achieve the goals proposed in the activities. Four students were able to program KIBO without help. On the third research question, “How does KIBO affect the emotional behavior of students with DS? (observed interactions and emotions)”, we observed high positive emotions during the intervention with KIBO in six students (1), medium in one (0.5), and no negative emotions. Figure 6 and Figure 7 show the results of the behaviors observed during the two intervention sessions where the students worked on programming concepts.
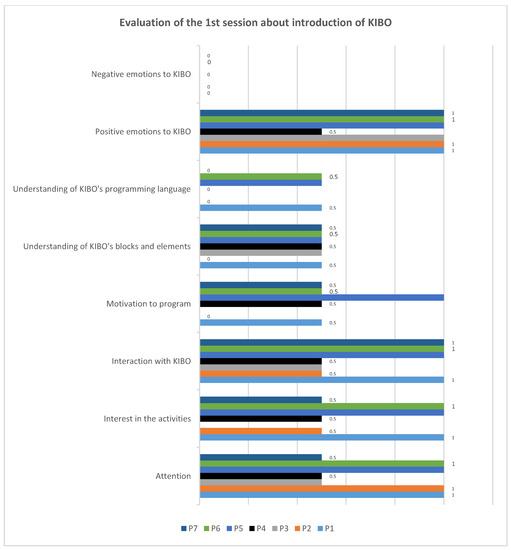
Figure 6.
Results of the behaviors observed in the first, introductory session to the KIBO robot.
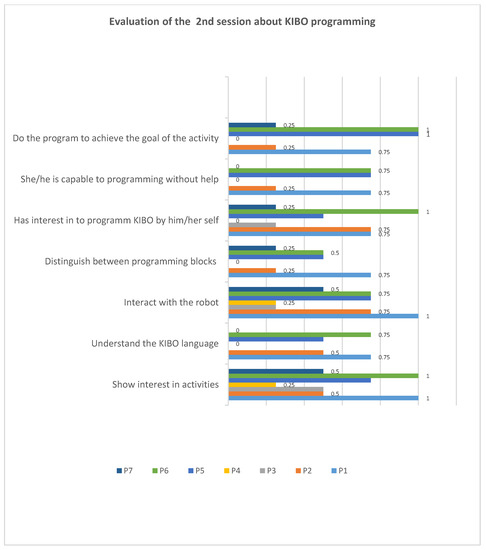
Figure 7.
Results of the behaviors observed in the second session, on programming KIBO.
Concerning the CT abilities, Table 3 summarizes the main findings for each participant in each session.
Table 3.
Main findings on CT abilities per participant.
5. Conclusions
The results of this study show that KIBO engages and promotes the learning of basic programming and computational thinking skills in students with DS. However, some drawbacks were identified with KIBO, for example in the assembly of the wheel and motors, or in the scanning of the bar codes, since the children placed the blocks too close to the scanner. Sometimes the children did not wait for the beep or LED to confirm that the code had been read before continuing with the sequence. Regarding the exercises, the students sometimes simply put the blocks together with no logical sequence.
To address the different research goals, we can affirm that the KIBO robot sparked very positive emotions in DS students, and kept them motivated over the course of the sessions. All DS students responded favorably to working with KIBO, and in some cases showed progress in their knowledge of the robot and its programming, evolving positively between one session and the next.
Regarding the group of individuals with DS involved in our research, we must note that they present characteristics, skills, and aptitudes that are favorable to working with robots and programming. After our analysis of each of the seven participants, we can affirm that six of them have had very good results working on the logical–mathematical thinking skills developed. For this reason, we believe that they are able to acquire computational thinking in the same way that they acquire mathematical thinking. Some participants needed more time than their peers to acquire the same skills. In general, the process to consolidate learning in students with DS takes longer than in individuals without this condition, as they learn more slowly and differently than persons without disabilities. In the intervention sessions conducted with DS students, we incorporated different educational activities, like the KIBO robot. We introduced its elements and language programming and other activities related to other content, such as mathematics, language, emotional and social skills, etc. Through these activities, DS students were initiated in computational thinking.
As limitations of this study, we note the short period of time used to develop the pilot and the number of participants involved. Another limitation of this exploratory study is the probable bias in the subjective measurements, mainly in the observation procedures and in the interview. Therefore, we plan to extend the study in the next academic year by involving more students and tutors. We are also planning other activities on computational thinking without robots, with robots, and with tablets.
We believe that computational thinking should be initiated at an early age, together with reading, writing, and mathematical knowledge. It is necessary to start working on computer literacy from a young age in ordinary classroom settings, focusing on inclusion and on working with different types of disabilities [47]. Moreover, the teachers indicated that tangible robotics would be useful as educational tools for their students and as motivational tools. However, computational thinking needs a specific space and recognition in the curriculum and should not be considered as merely complementary.
Author Contributions
C.G. conceived and designed the experiments; E.H.-G. performed the experiments and analyzed the data; C.G. wrote the paper and edited and reviewed the paper and bibliography. L.M.-R., S.H.-M. and N.R.-A. collaborated in the sample selection and the facilities to conduct the experiment. M.D.G.-F. and A.I.-M. edited and reviewed the paper.
Funding
This research received no external funding.
Acknowledgments
The authors are very grateful to the professionals, students and families of the Tenerife Down association who collaborated in the development of this study.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A—Rubrics
Table A1.
Initial Assessment.
Table A1.
Initial Assessment.
| Did she/he know about robots previously? | Does she/he organize the information received? | Does she/he analyze the information received logically? | Is he/she able to distinguish objects between properties? | Does he/she respond favorably to literacy? | Does he/she respond favorably to logical-mathematical thinking? | |||||||||||||
| S | A | N | S | A | N | S | A | N | S | A | N | S | A | N | S | A | N | |
| Participant 1 | ||||||||||||||||||
| Participant 2 | ||||||||||||||||||
| Participant 3 | ||||||||||||||||||
| Participant 4 | ||||||||||||||||||
| Participant 5 | ||||||||||||||||||
| Participant 6 | ||||||||||||||||||
| Participant 7 | ||||||||||||||||||
A: Always, S: Sometimes; N: Never.
Table A2.
1st Intervention Session.
Table A2.
1st Intervention Session.
| A | S | N | |
| Pays attention when the robot is presented | |||
| Shows an interest in the activities presented | |||
| Interacts with the robot | |||
| Shows an interest in programming the robot to achieve a specific goal | |||
| Identifies KIBO’s different programming blocks | |||
| Tries to understand KIBO’s programming language | |||
| KIBO causes joy | |||
| KIBO causes rejection |
A: Always, S: Sometimes; N: Never.
Table A3.
2nd Intervention Session.
Table A3.
2nd Intervention Session.
| 1 | 2 | 3 | 4 | 5 | |
| Shows an interest in the activities planned | |||||
| Understands KIBO’s programming language | |||||
| Interacts with the robot | |||||
| Identifies KIBO’s different programming blocks | |||||
| Shows an interest in programming the robot to achieve a specific goal | |||||
| Is capable of programming without help | |||||
| Does the programming intentionally to achieve the objective of each activity |
1 = Strongly disagree; 5 = Strongly agree.
References
- Bers, M.U. Conclusion. In Coding as a Playground; Routledge: London, UK, 2017; pp. 182–184. [Google Scholar]
- Resnick, M.; Siegel, D. InvIted commentary a different approach to coding. Int. J. People Oriented Program. 2015, 4, 1–4. [Google Scholar]
- Marina Umaschi Bers, Coding as a Literacy for the 21st Century—Education Futures: Emerging Trends in K-12—Education Week, Education Week. 2018. Available online: https://blogs.edweek.org/edweek/education_futures/2018/01/coding_as_a_literacy_for_the_21st_century.html (accessed on 18 June 2019).
- Bers, M.U.; González-González, C.S.; Torres, M.B.A. Coding as a playground: Promoting positive learning experiences in childhood classrooms. Comput. Educ. 2019, 138, 130–145. [Google Scholar] [CrossRef]
- Garcia-Penalvo, F.J. A brief introduction to TACCLE 3—Coding European project. In Proceedings of the 2016 International Symposium on Computers in Education (SIIE), Salamanca, Spain, 13–15 september 2016; pp. 1–4. [Google Scholar]
- Bocconi, A.C.S.; Dettori, K.E.G.; Ferrari, A. Developing Computational Thinking in Compulsory Education; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Ackermann, E. Piaget’s constructivism, papert’s constructionism: What’s the difference? Future Learn. Group Publ. 2001, 5, 438. [Google Scholar]
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books, Inc.: New York, NY, USA, 1993. [Google Scholar]
- Wing, J.M. Computational thinking. Commun. ACM 2006, 49, 33. [Google Scholar] [CrossRef]
- Balanskat, A.; Engelhardt, K. Computing Our Future Computer Programming and Coding Priorities, School Curricula and Initiatives across Europe; European Schoolnet: Brussels, Belgium, 2015. [Google Scholar]
- Jung, S.; Won, E.; Jung, S.E.; Won, E. Systematic review of research trends in robotics education for young children. Sustainability 2018, 10, 905. [Google Scholar] [CrossRef]
- de Salamanca, F.E.U.; García-Peñalvo, F.J.; Prieto, X.M.; Vidal, E.V. Education in the Knowledge Society; Ediciones Universidad de Salamanca: Salamanca, Spain, 2017. [Google Scholar]
- Moreno-Leon, J.; Robles, G. The Europe code week (CodeEU) initiative shaping the skills of future engineers. In Proceedings of the 2015 IEEE Global Engineering Education Conference (EDUCON), Tallinn, Estonia, 18–20 March 2015; pp. 561–566. [Google Scholar]
- Instituto Nacional de Tecnologías Educativas y de Formación del Profesorado–INTEF. Programación, robótica y pensamiento computacional en el aula. Situación en España 2018. Available online: http://code.intef.es/wp-content/uploads/2017/09/Pensamiento-Computacional-Fase-1-Informe-sobre-la-situaci%c3%b3n-en-Espa%c3%b1a.pdf (accessed on 18 June 2019).
- Bers, M.U. Design principles. In Coding as a Playground; Routledge: London, UK, 2017; pp. 163–172. [Google Scholar]
- Bers, M.U.; Horn, M.S. Tangible programming in early childhood: Revisiting developmental assumptions through new technologies. In The Go-To Guide for Engineering Curricula PreK-5: CHOOSING and Using The Best Instructional Materials for Your Students; Sneider, C.I., Ed.; SAGE: Portland, OR, USA, 2014; pp. 133–145. [Google Scholar]
- Komis, V.; Misirli, A. The environments of educational robotics in early childhood education: Towards a didactical analysis. Educ. J. Univ. Patras UNESCO Chair. 2016, 3, 238–246. [Google Scholar]
- Stoeckelmayr, K.; Tesar, M.; Hofmann, A. Kindergarten children programming robots: A first attempt. In Proceedings of the 2nd International Conference on Robotics in Education (RIE), Vienna, Austria, September 2011. [Google Scholar]
- Eck, J.; Hirschmugl-Gaisch, S.; Hofmann, A.; Kandlhofer, M.; Rubenzer, S.; Steinbauer, G. Innovative concepts in educational robotics: Robotics projects for kindergartens in Austria. In Proceedings of the Austrian Robotics Workshop, Vienna, Austria, May 2013. [Google Scholar]
- Janka, P. Using a programmable toy at preschool age: Why and how? In Proceedings of the International Conference on Simulation, Modeling and Programming for Autonomous Robots (SIMPAR), Venice, Italy, 3–4 November 2008; pp. 112–121. [Google Scholar]
- Baxter, P.; Ashurst, E.; Read, R.; Kennedy, J.; Belpaeme, T. Robot education peers in a situated primary school study: Personalisation promotes child learning. PLoS ONE 2017, 12, e0178126. [Google Scholar] [CrossRef]
- Filgueira, M.G.; González, C.S.G. PequeBot: Propuesta de un Sistema Ludificado de Robótica Educativa para la Educación Infantil. 2017. Available online: https://riull.ull.es/xmlui/handle/915/6677 (accessed on 18 June 2019).
- Nadel, L. Down’s syndrome: A genetic disorder in biobehavioral perspective. Genes. Brain Behav. 2003, 2, 156–166. [Google Scholar] [CrossRef]
- Bailey, N. Diagnostic manual—Intellectual disability: A textbook of diagnosis of mental disorders in persons with intellectual disability (DM-ID). Adv. Ment. Heal. Learn. Disabil. 2008, 2, 60–61. [Google Scholar] [CrossRef]
- Tien, B.; PREP Program. Effective Teaching Strategies for Successful Inclusion: A Focus on Down Syndrome; PREP Program: Calgary, AB, Canada, 1999. [Google Scholar]
- González, C.; Noda, A.; Bruno, A.; Moreno, L.; Muñoz, V. Learning subtraction and addition through digital boards: A down syndrome case. Univ. Access. Inf. Soc. 2015, 14, 29–44. [Google Scholar] [CrossRef]
- Ministry of Education. Down syndrome A resource for educators Mate P¯ uira Kehe He rauemi m¯ a te kaiwhakaako. 2015. Available online: https://www.inclusive.tki.org.nz/assets/inclusive-education/MOE-publications/MOESE0045DownSyndrome-booklet.pdf (accessed on 18 June 2019).
- Carrión, P.V.T. Evaluación de Estrategias de Aprendizaje con HCI KINECT en Alumnos con Síndrome Down. 2017. Available online: http://e-spacio.uned.es/fez/view/tesisuned:ED-Pg-CyEED-Pvtorres (accessed on 18 June 2019).
- Martos-Crespo, F. Guía Para la Atención educativa de los Alumnos y Alumnas con síndrome de Down, Granada. 2006. Available online: http://www.juntadeandalucia.es/averroes/centros-tic/11700123/helvia/sitio/upload/Guia_para_la_atencion_educativa_al_alumnado_con_sobredotacixn_intelectual.pdf (accessed on 18 June 2019).
- Sternberg, R.J. Thinking Styles; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Grover, S.; Pea, R. Computational thinking in K–12. Educ. Res. 2013, 42, 38–43. [Google Scholar] [CrossRef]
- Computer Science Teachers Association. CSTA K-12 Standards—Computer Science Standards. 2017. Available online: https://www.csteachers.org/page/about-csta-s-k-12-nbsp-standards (accessed on 6 May 2019).
- Habib, M. (Ed.) Advanced Online Education and Training Technologies; IGI Global: Hershey, PA, USA, 2019. [Google Scholar]
- Brennan, K.; Resnick, M. New frameworks for studying and assessing the development of computational thinking. In Proceedings of the 2012 Annual Meeting of the American Educational Research Association, Vancouver, BC, Canada, 13–17 April 2012. [Google Scholar]
- Resnick, M.; Maloney, J.; Monroy-Hernández, A.; Rusk, N.; Eastmond, E.; Brennan, K.; Millner, A.; Rosenbaum, E.; Silver, J.; Silverman, B.; et al. Scratch: Programming for all. Commun. ACM 52 2009, 52, 60–67. [Google Scholar]
- Brosterman, N.; Togashi, H.N. Inventing Kindergarten; Abrams: New York, NY, USA, 1997. [Google Scholar]
- Bers, M.U. Blocks to Robots: Learning with Technology in the Early Childhood Classroom; Teachers College Press: New York, NY, USA, 2008. [Google Scholar]
- Sullivan, A.; Bers, M.U. Robotics in the early childhood classroom: Learning outcomes from an 8-week robotics curriculum in pre-kindergarten through second grade. Int. J. Technol. Des. Educ. 2016, 26, 3–20. [Google Scholar] [CrossRef]
- Bers, M.U.; Flannery, L.; Kazakoff, E.R.; Sullivan, A. Computational thinking and tinkering: Exploration of an early childhoodrobotics curriculum. Comput. Educ. 2014, 72, 145–157. [Google Scholar] [CrossRef]
- Cejka, E.; Rogers, C.; Portsmore, M. Kindergarten robotics: Using robotics to motivate math, science, and engineering literacy in elementary school. Int. J. Eng. Educ. 2006, 22, 711. [Google Scholar]
- Wyeth, P. How young children learn to program with sensor, action, and logic blocks. J. Learn. Sci. 2008, 17, 517–550. [Google Scholar] [CrossRef]
- Kazakoff, E.R.; Sullivan, A.; Bers, M.U. The effect of a classroom-based intensive robotics and Programming workshop on sequencing ability in early childhood. Early Child. Educ. J. 2013, 41, 245–255. [Google Scholar] [CrossRef]
- National Association for the Education of Young Children; Clements, D.; Sarama, J. National association for the education of young children. Young Child. 2003, 58, 6. [Google Scholar]
- Hu, R.; Feng, J.; Lazar, J.; Kumin, L. Investigating input technologies for children and young adults with Down syndrome. Univ. Access Inf. Soc. 2013, 12, 89–104. [Google Scholar] [CrossRef]
- Bargagna, S.; Castro, E.; Cecchi, F.; Cioni, G.; Dario, P.; Dell’Omo, M.; Di Lieto, M.C.; Inguaggiato, E.; Martinelli, A.; Pecini, C.; et al. Educational robotics in down syndrome: A feasibility study. Technol. Knowl. Learn. 2018, 24, 315–323. [Google Scholar] [CrossRef]
- Taylor, M.S. Computer programming with Pre-K through first-grade students with intellectual disabilities. J. Spec. Educ. 2018, 52, 78–88. [Google Scholar] [CrossRef]
- Albo-Canals, J.; Martelo, A.B.; Relkin, E.; Hannon, D.; Heerink, M.; Heinemann, M.; Leidl, K.; Bers, M.U. A pilot study of the KIBO robot in children with severe ASD. Int. J. Soc. Robot. 2018, 10, 371–383. [Google Scholar] [CrossRef]
- González-González, C.; González, E.H.; Ruiz, L.M.; Infante-Moro, A.; Guzmán-Franco, M.D. Teaching computational thinking to down syndrome students. In Proceedings of the Sixth International Conference on Technological Ecosystems for Enhancing Multiculturality—TEEM’18, Salamanca, Spain, 24–26 October 2018; pp. 18–24. [Google Scholar]
- Given, L.M. The Sage Encyclopedia of Qualitative Research Methods; Sage Publications: London, UK, 2008. [Google Scholar]
- Preiss, G.; Friedrich, G. Mente y Cerebro; Prensa Cientiífica: Beijing, China, 2002; Volume 4. [Google Scholar]
- Picard, R.W. Affective computing: Challenges. Int. J. Hum. Comput. Stud. 2003, 59, 55–64. [Google Scholar] [CrossRef]
- Torres-Carrión, P.; González-González, C.; Carreño, A.M. Facial emotion analysis in Down’s syndrome children in classroom. In Proceedings of the ACM International Conference Proceeding Series, Interacción’15, Vilanova i la Geltrú, Spain, 7–9 September 2015. [Google Scholar]
- Torres-Carrión, P.; González-González, C.; Carreño, A.M. Methodology of emotional evaluation in education and rehabilitation activities for people with down syndrome. In Proceedings of the ACM International Conference Proceeding Series, Interaccion’14, Puerto de la Cruz, Tenerife, Spain, 10–12 September 2014. [Google Scholar]
- González-González, C. Emodiana: Un instrumento para la evaluación subjetiva de emociones en niños y niñas. In Proceedings of the Actas Del XIV Congreso Internacional de Interacción Persona-Ordenador, Madrid, Spain, 17–20 September 2013. [Google Scholar]
- Torres-Carrión, P.; González, C.S.G.; Barba-Guamán, L.R.; Torres-Torres, A.C. Experiencia afectiva de usuario (UAX): Modelo Desde Sensores Biométricos en aula de clase con Plataforma Gamificada de Interacción Gestual. 2017. Available online: https://riull.ull.es/xmlui/handle/915/6737 (accessed on 18 June 2019).
- Bers, M.U. KIBO. In Coding as a Playground; Routledge: London, UK, 2017; pp. 135–162. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).