Building Realistic Mobility Models for Mobile Ad Hoc Networks


Abstract
1. Introduction
1.1. Problem Statement
1.2. Research Aim
2. Literature Review
2.1. Mobile Ad Hoc Network (MANET)
2.2. Basic Operations of MANET
2.3. Range of MANET Applications
2.3.1. Military Application
2.3.2. Vehicular Networks
2.4. Approaches for MANET Performance Evaluation
2.4.1. Physical Experimental Environments
2.4.3. Simulation
2.5. nS-2 and nS-3 in Mobile Ad Hoc Network Research
3. Realistic Scenarios and Modelling Issues
3.1. World Size and Simulation Time
3.1.2. Simulation Time
3.1.3. Movement Models
The Random Way Point Model (RWP)
Boundless Simulation Area
The Gauss–Markov Model
City-based Models
Freeway Model
Group Mobility Model
Trace-Based Models
3.2. Ways of Deriving Movement Models
4. Manet Routing Protocol Evaluation
5. Battlefield Simulation Model
5.1. Using Cartoon Animation to Build a Battlefield Simulation Model
5.2. Battlefield Applications
5.2.1. Overview of MANETs in Battlefield Applications
5.2.2. Battlefield Tactics
5.2.3. Modelling of Battlefields
5.3. Related Work on Battlefield Simulations for MANET
5.4. Real-World Battlefield Behaviour
5.5. Scenario Description and Implementation
5.5.1. Description of the Realistic Model
5.5.2. The Military Operation
5.5.3. Communications Model
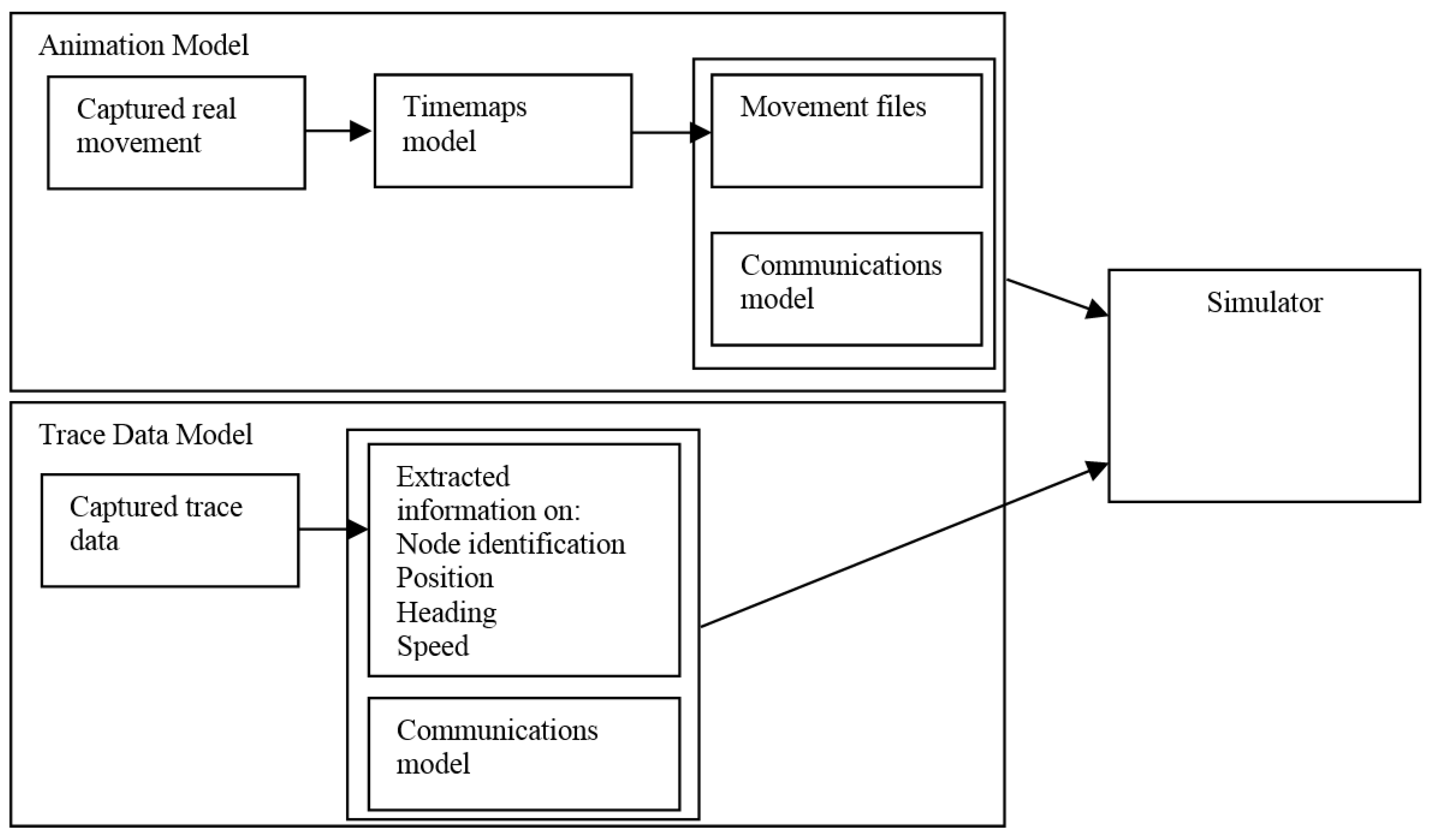
5.6. Producing the Battlefield Model Using Timemaps
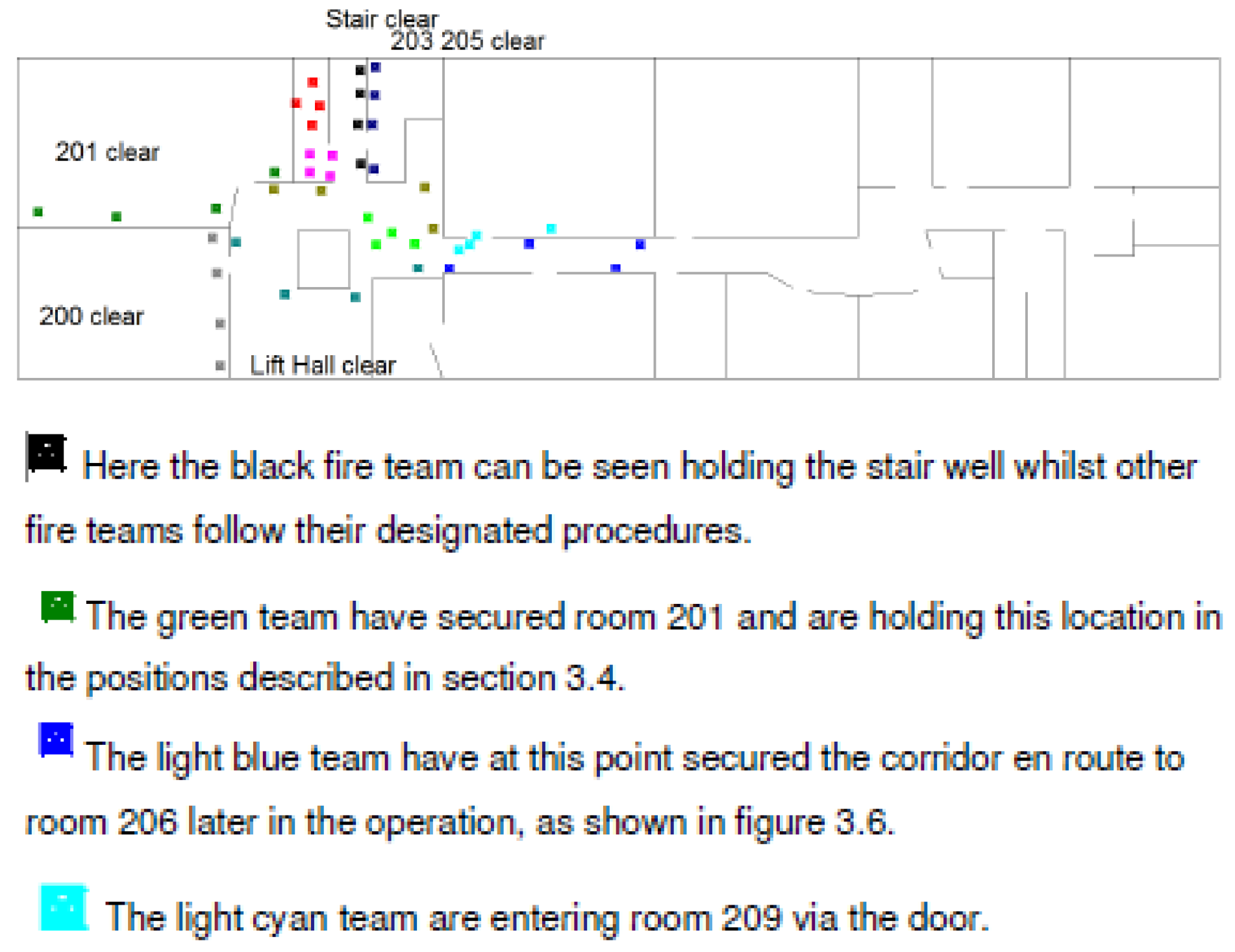
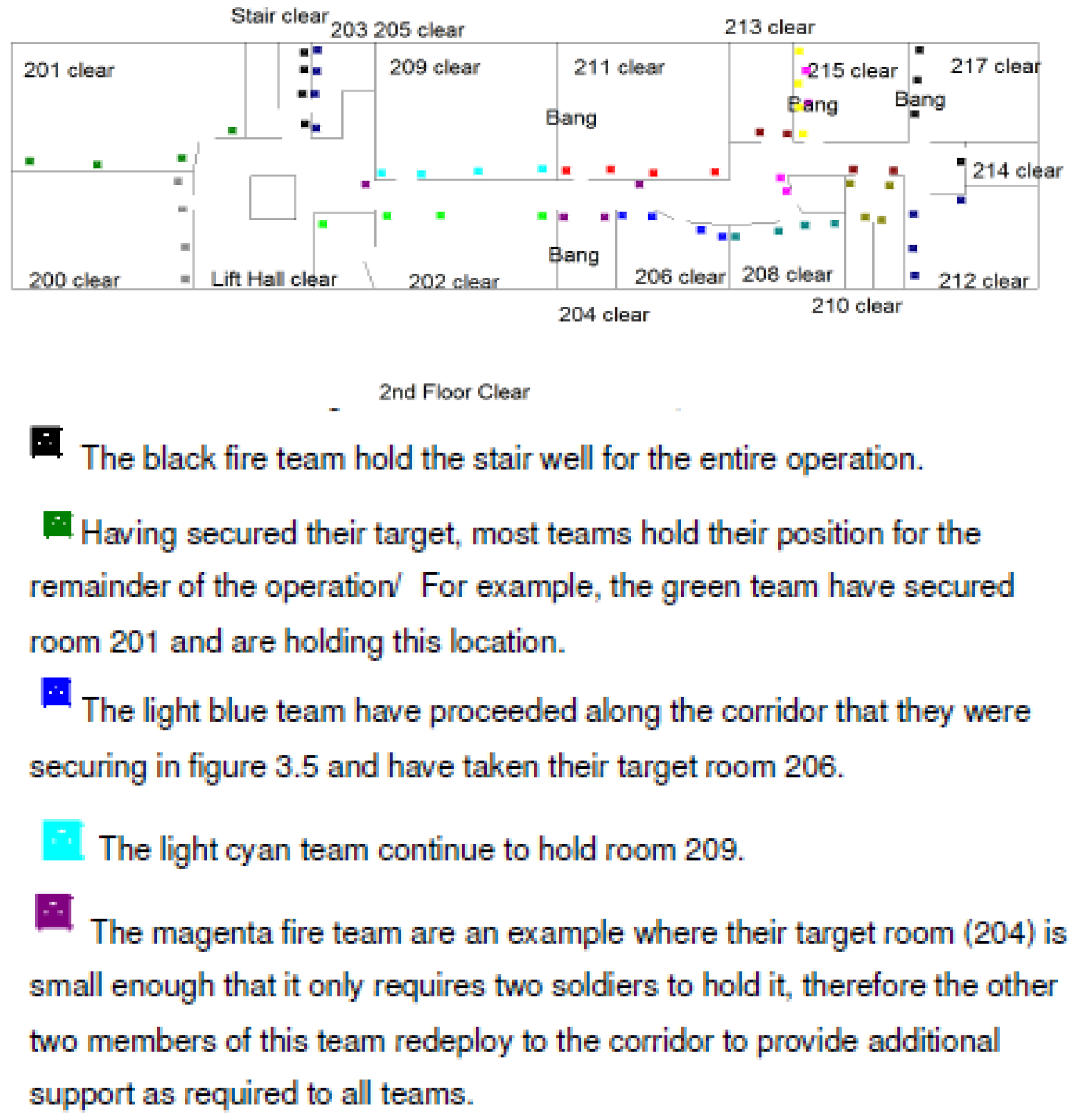
5.6.1. Producing the Movement Model
5.6.2. Use of Timemaps
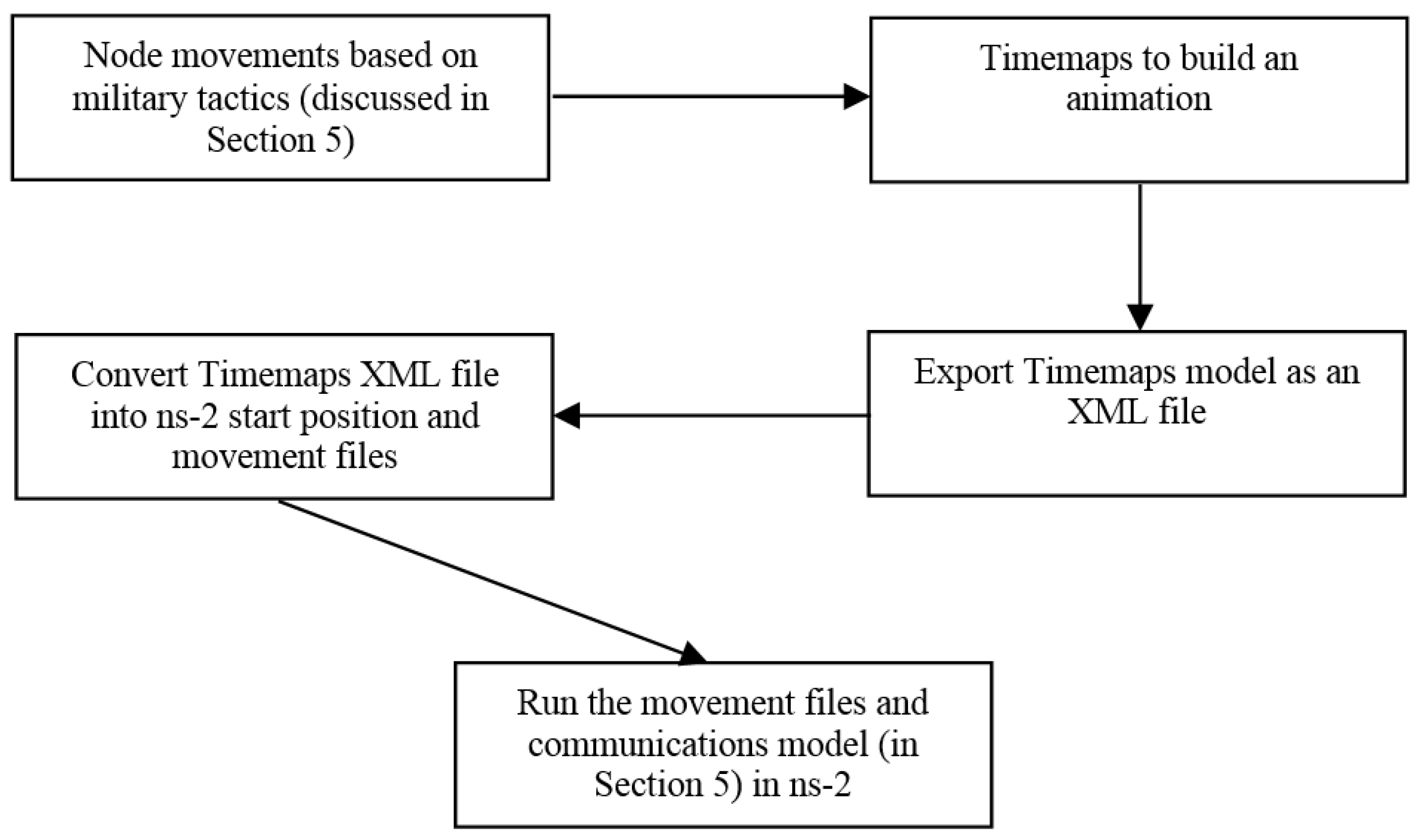
5.6.3. Conversion of Timemaps to ns-2 Movement File
5.6.4. Reference Model
5.7. Battlefield Model Usage and Verification
5.8. Experiments Performed
5.9. Critique on the Battlefield Model
5.9.1. Issues with the Current Model
5.9.2. The Development Tools
5.9.3. Other Scenarios
5.9.4. Comparison with Other Mobility Models
5.10. Battlefield Model Summary and Conclusions
5.11. Animation-Based Modelling Conclusions
5.12. Results and Discussion
5.12.1. Battlefield Simulation Results
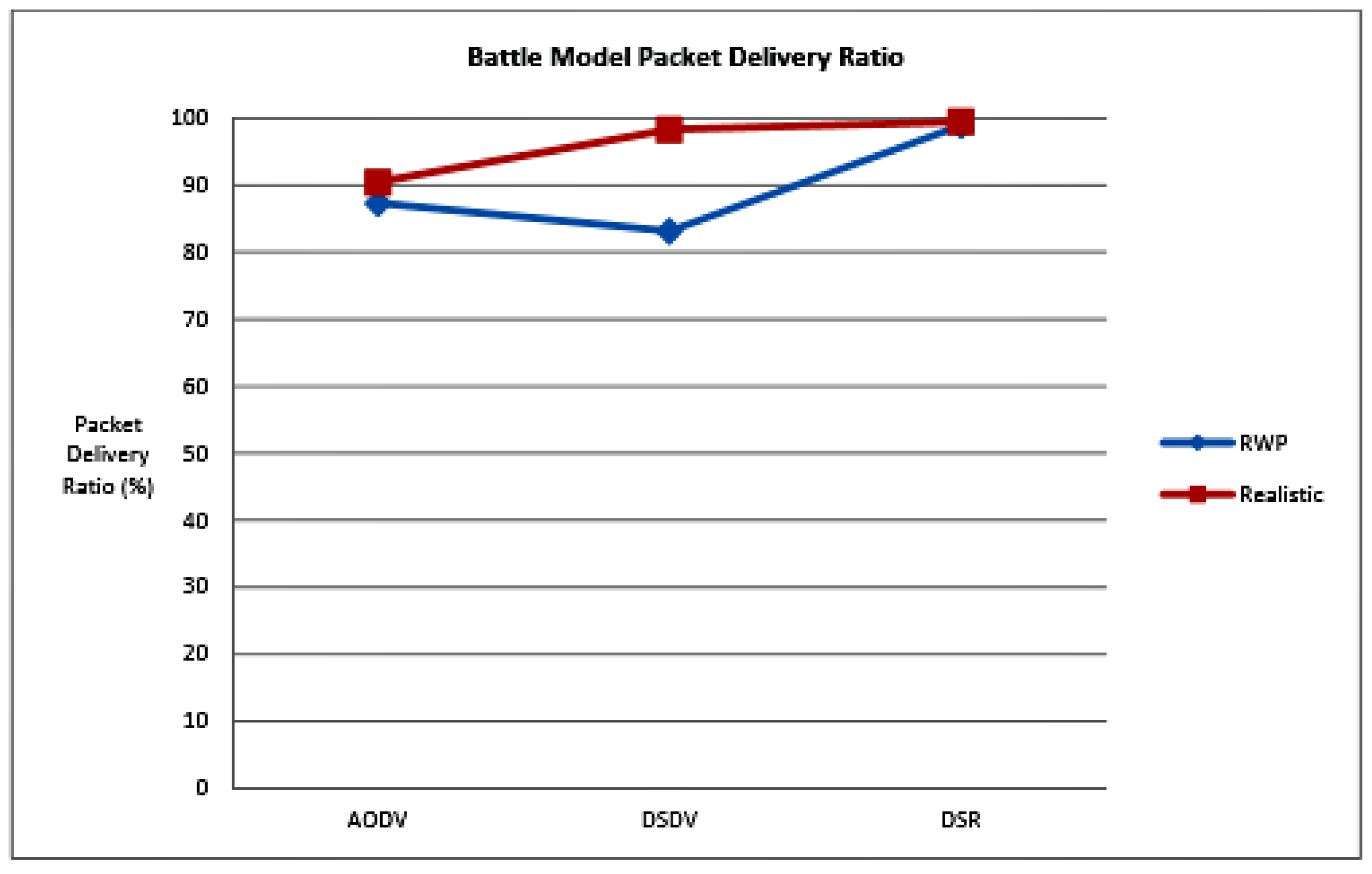
Packet Delivery Ratio for the Battlefield Model
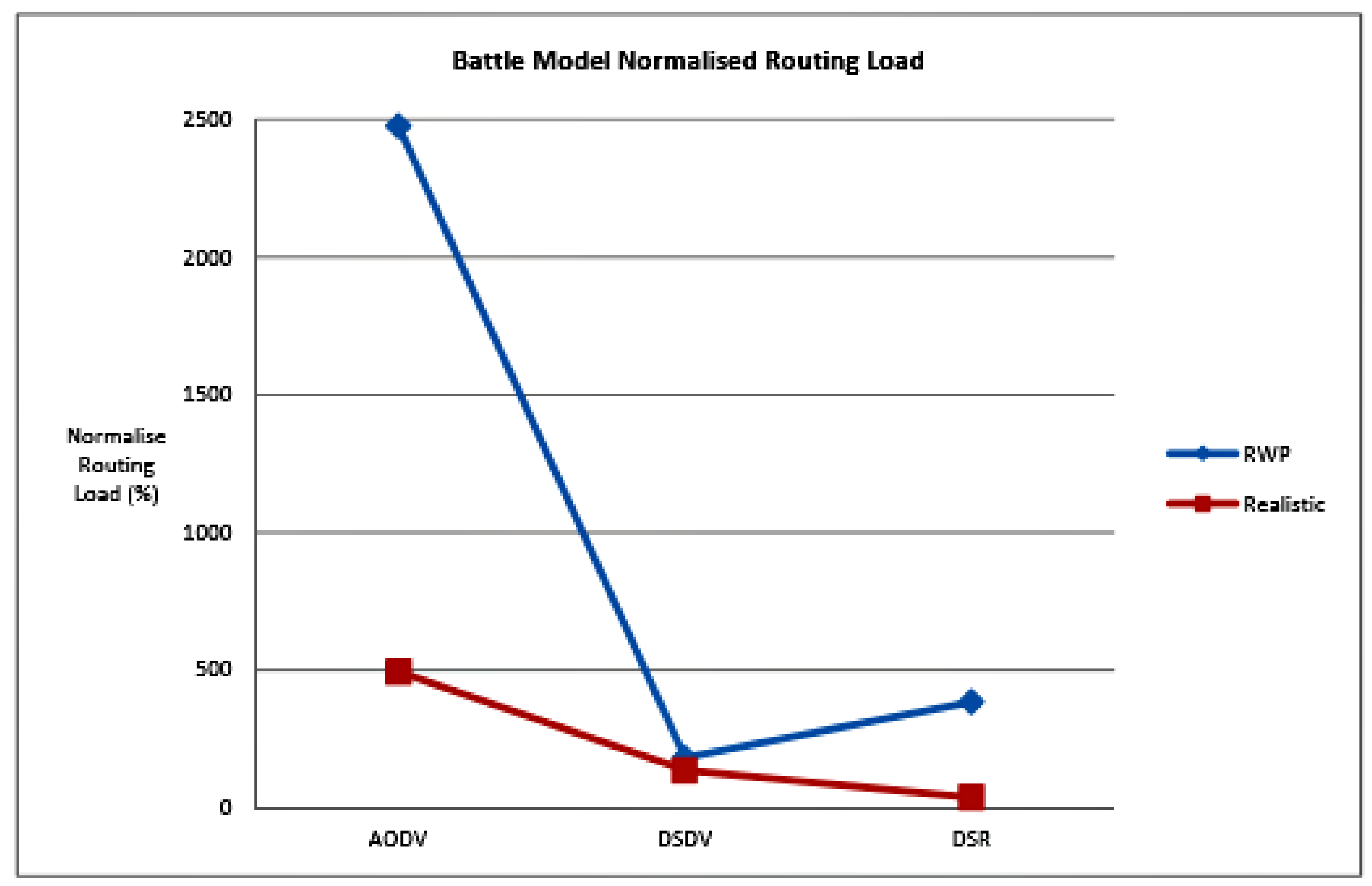
Normalized Routing Load for the Battlefield Model
Battlefield Model Results Summary
6. Real Shipping Movement Model
6.1. Real-World Model
6.2. Node Types
6.3. Communications Model
6.4. Shipping Model
6.5. Reference Model
6.6. Verification of the Model
6.7. Experiments Performed
6.8. Results and Discussion
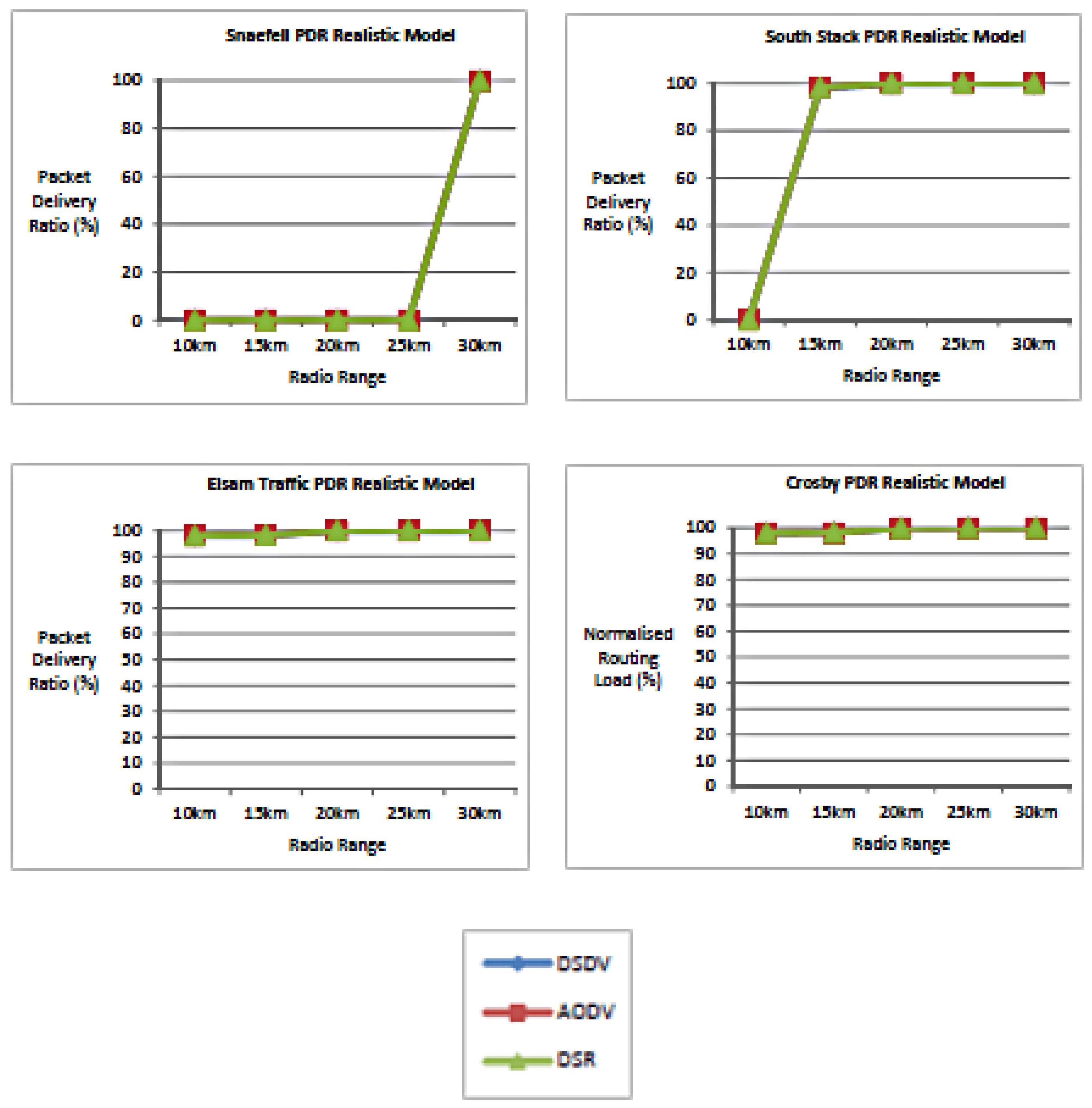
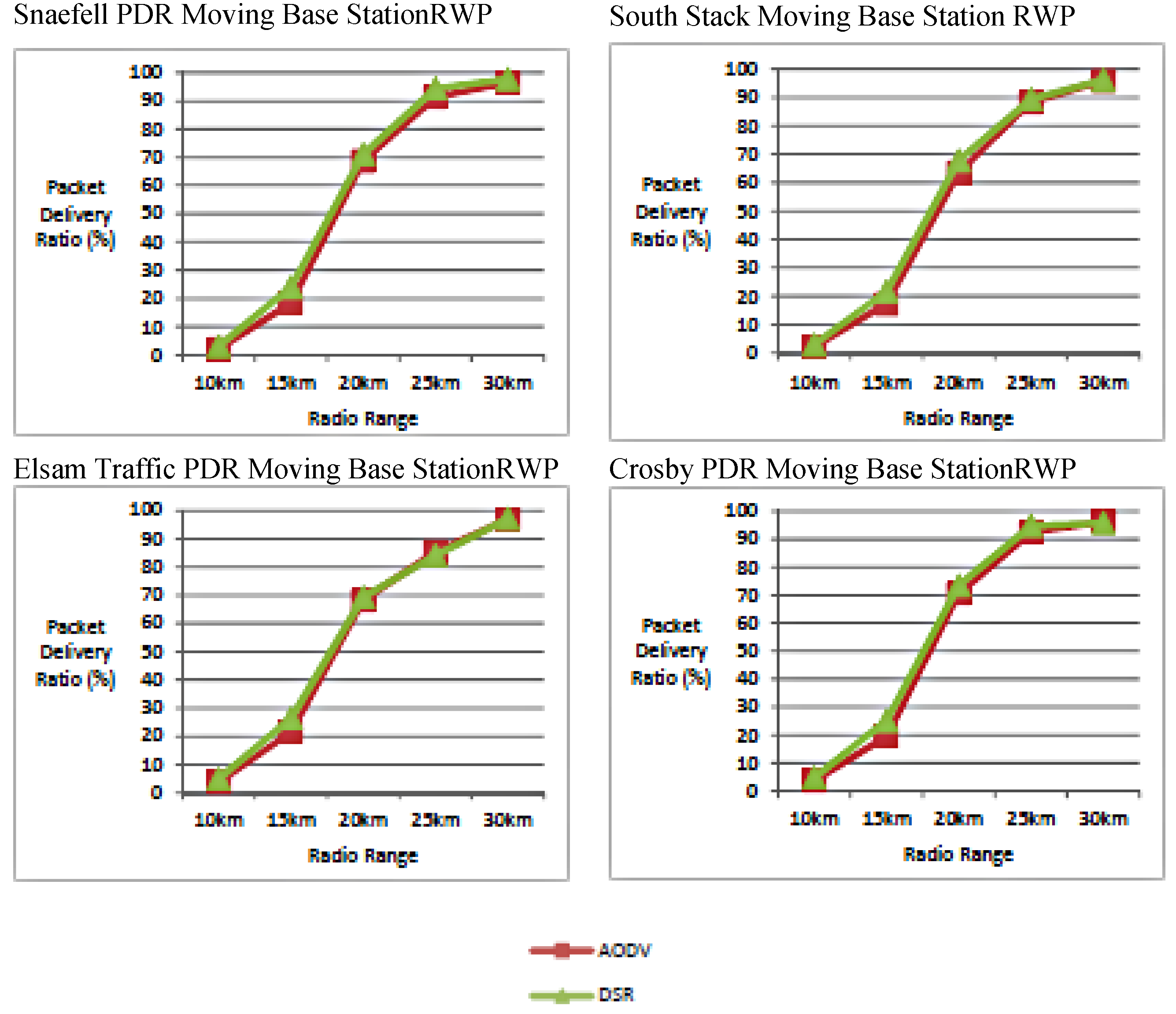
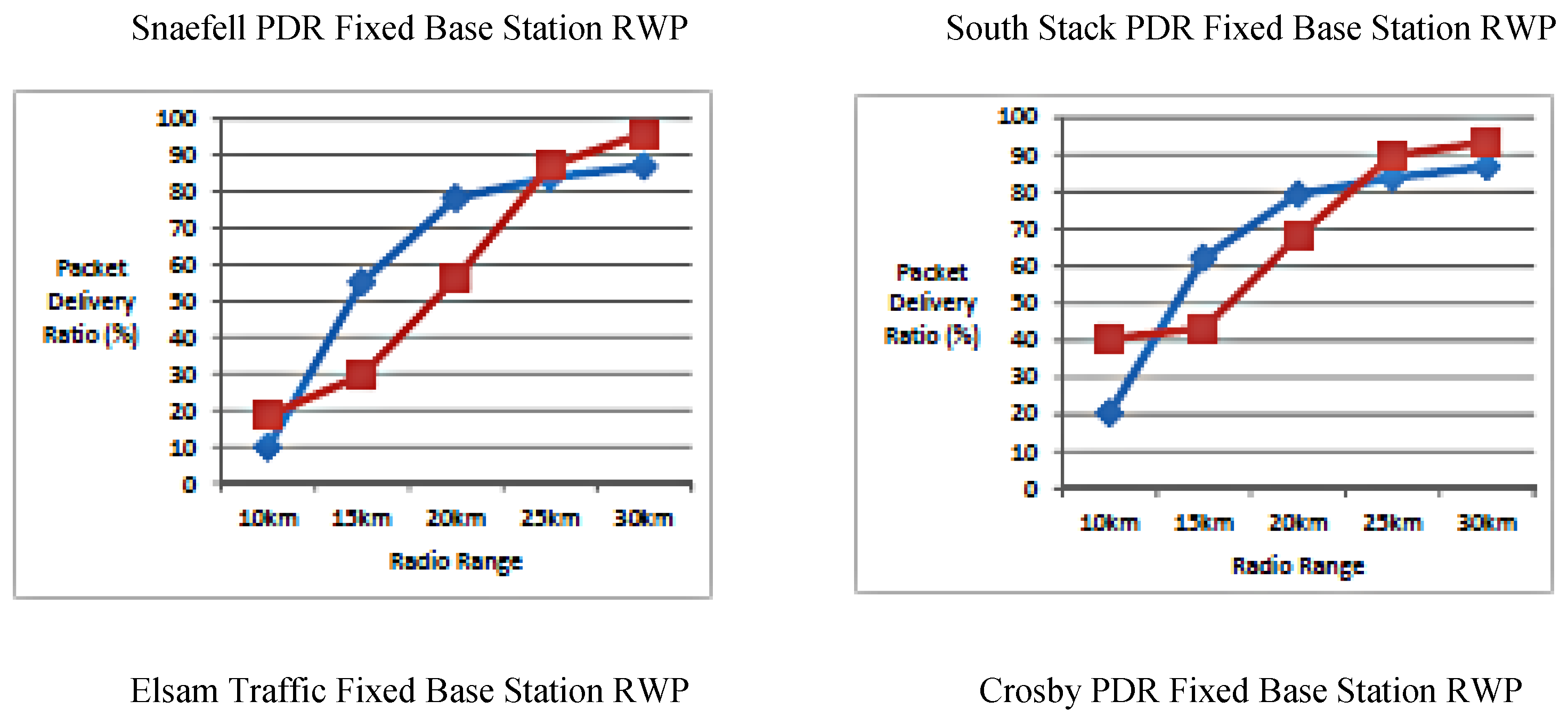
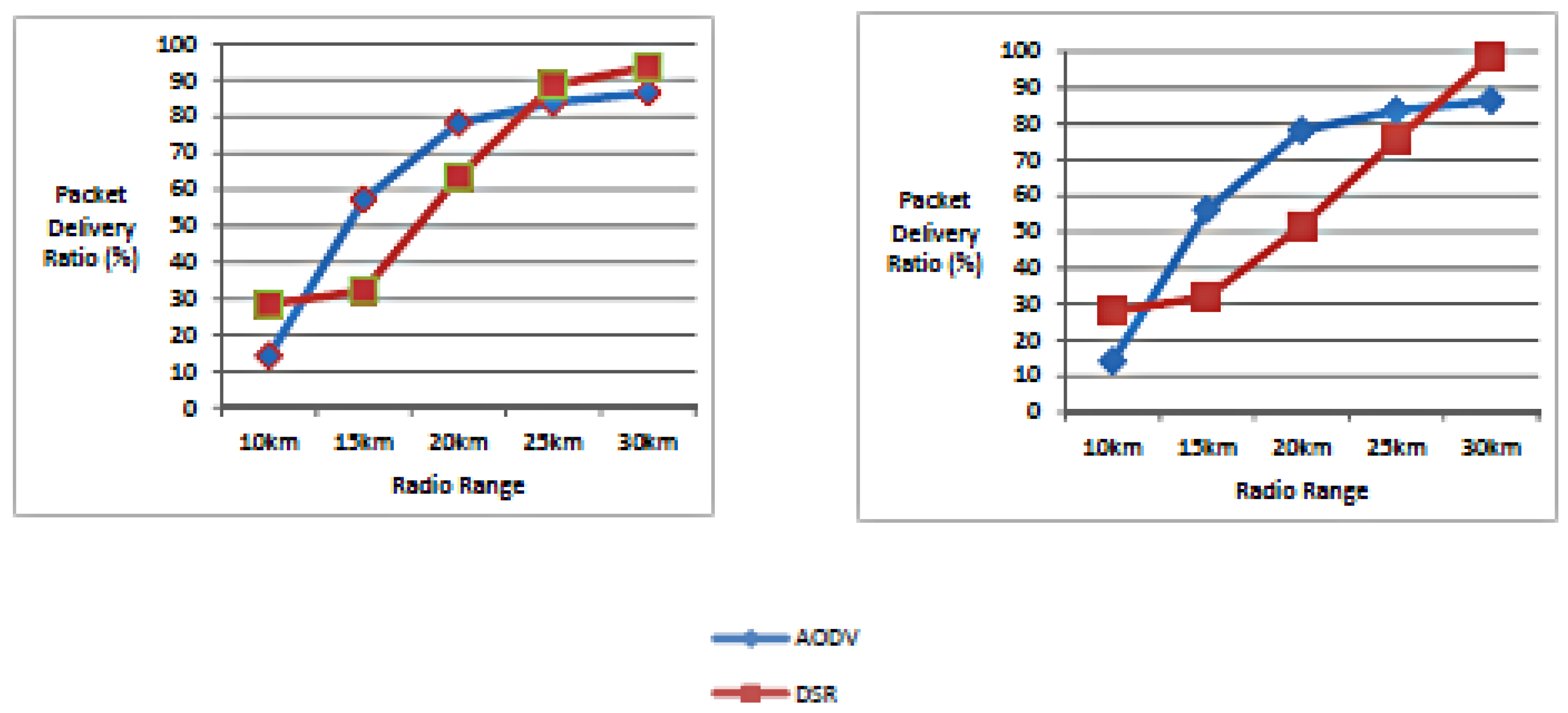
6.8.1. Packet Delivery Ratio on Realistic Shipping Mode l
6.8.2. Packet Delivery Ratio on the Random Waypoint Shipping Model
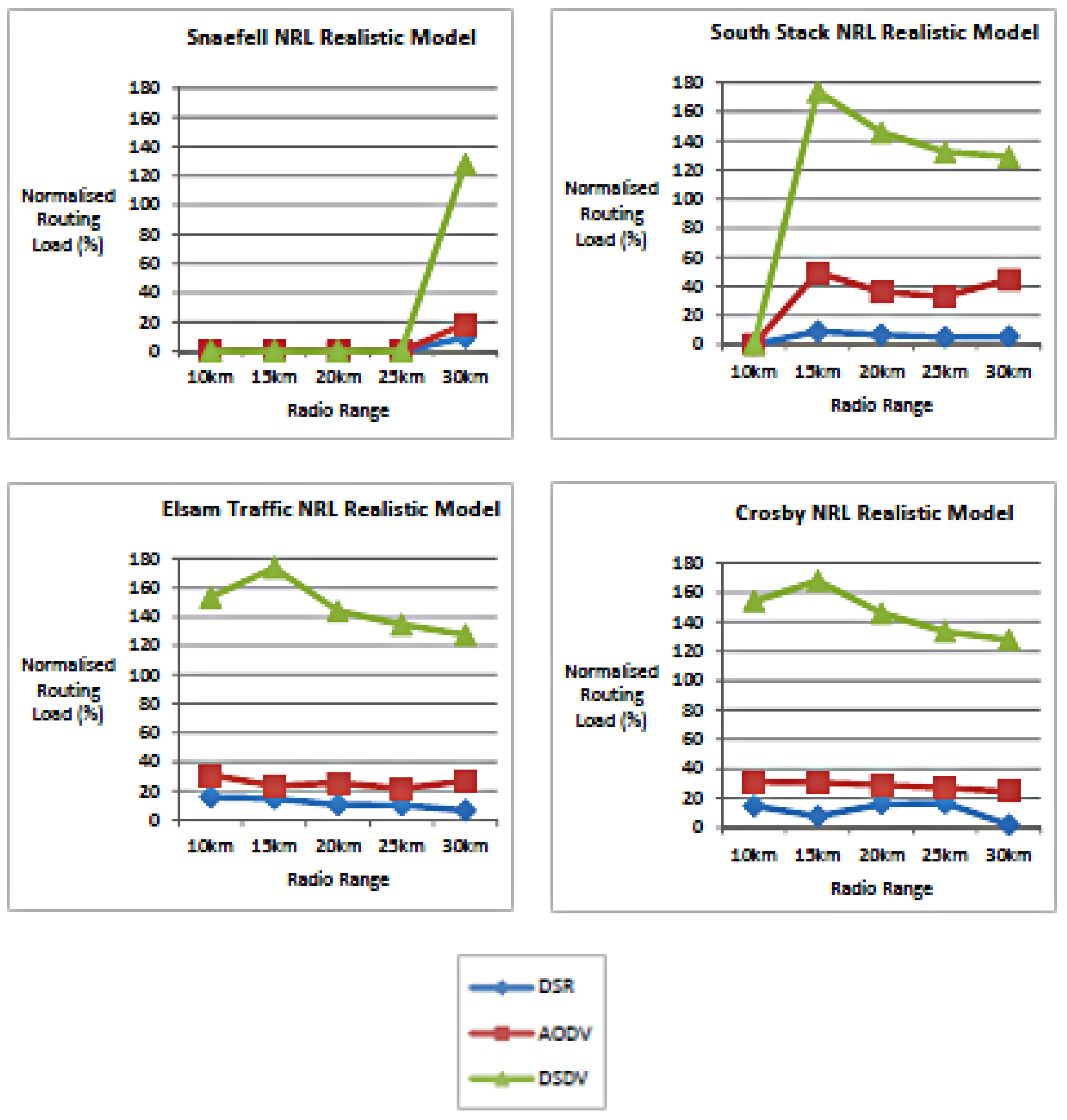
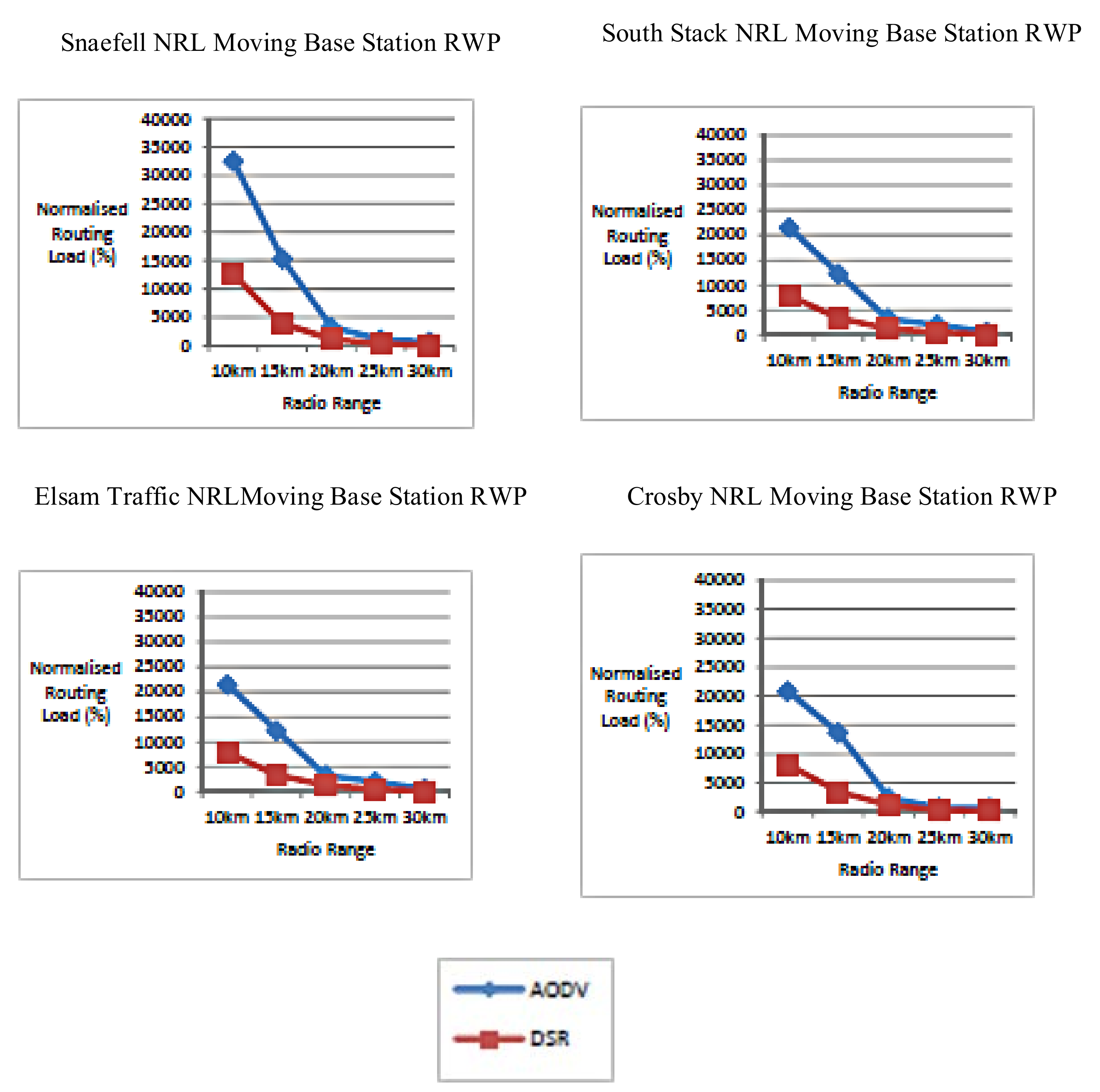
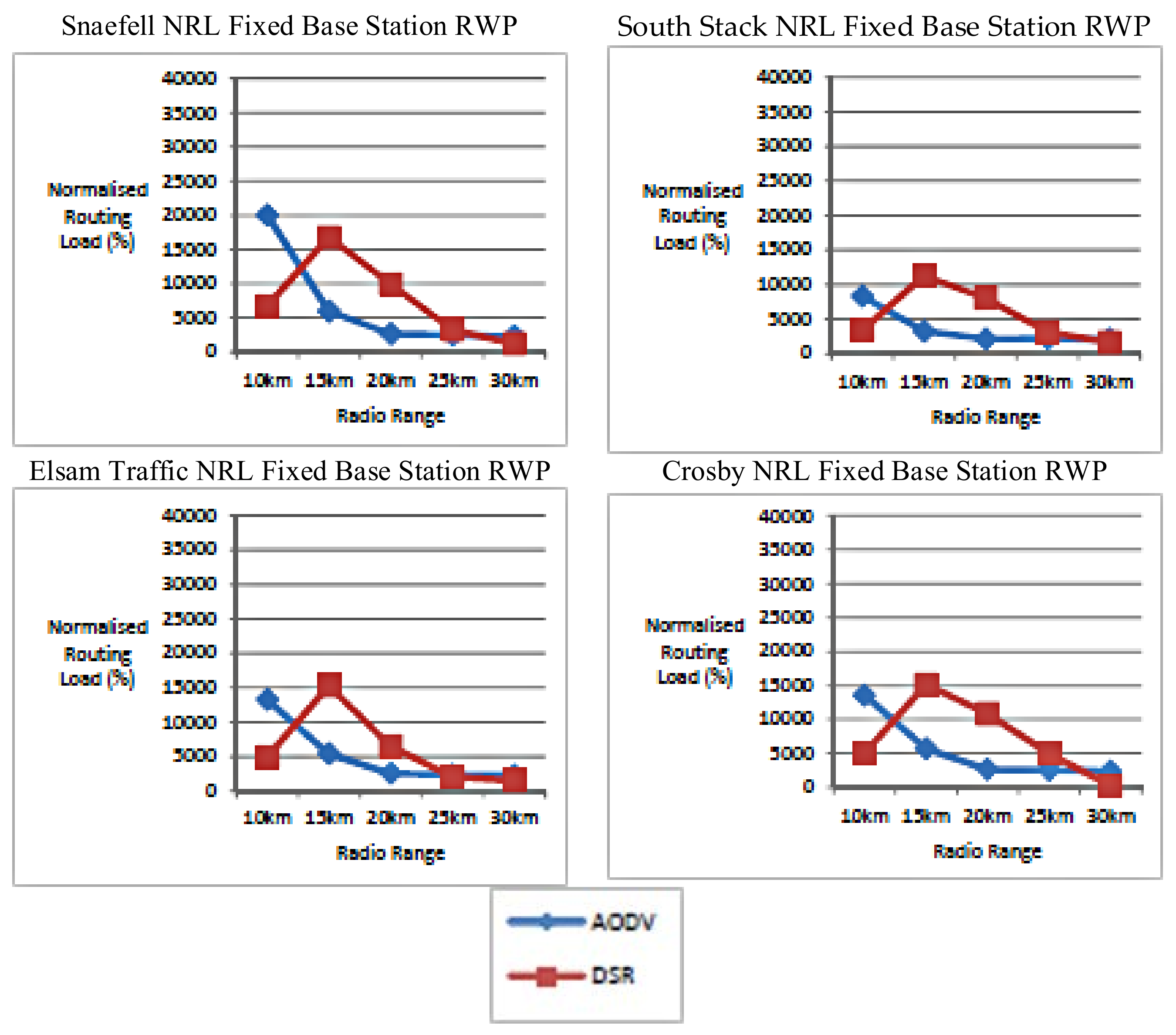
6.8.3. Normalized Routing Load on Realistic Shipping Model
6.8.4. Normalized Routing Load on Random Waypoint Shipping Model
6.9. Shipping Model Results Summary
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Pullin, A.J.; Pattinson, C. A Realistic Battlefield Model for the Evaluation of MANET. In Proceedings of the Fifth Annual Conference on Wireless on Demand Network Systems and Services (WONS 2008), Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 81–84. [Google Scholar]
- Pullin, A. Techniques for Building Realistic Simulation Models for Mobile Ad Hoc Network Research. Ph.D. Thesis, Leeds Beckett University, Leeds, UK, 2014. [Google Scholar]
- Abramson, N. The Aloha System. In AFIPS Conference Proceedings; AFIPS Press: Montvale, NJ, USA, 1970; pp. 281–285. [Google Scholar]
- Metcalfe, M.; Boggs, D. Ethernet: Distributed Packet Switching for Local Computer Networks. Commun. ACM 1976, 19, 395–404. [Google Scholar] [CrossRef]
- IEEE. OFFICIAL IEEE 802.11 WORKING GROUP PROJECT TIMELINES, 2013. Retrieved from IEEE 802.11 Working Group. Available online: http://grouper.ieee.org/groups/802/11/Reports/802.11_Timelines.htm (accessed on 14 July 2016).
- ITU. ITU Paves Way for Next-generation 4G Mobile Technologies, 2010. Geneva: ITU. Retrieved 01 19, 2013, from. Available online: http://www.itu.int/net/pressoffice/press_releases/2010/40.aspx#.U3niMSgvCbc (accessed on 25 April 2018).
- HuaWei. 5G: A Technology Vision, 2013. Available online: http://www.huawei.com/5gwhitepaper/ (accessed on 30 June 2016).
- Badu Networks. The Wireless Last Hop, 2016. Available online: http://badunetworks.com/wp-content/uploads/2016/02/WLH.pdf (accessed on 30 June 2016).
- Computerworld. 10 Things You Need to Do to Manage Your Network Effectively, 2011. Available online: http://www.computerworld.com/article/2470688/endpoint-security/10-things-you-need-to-do-to-manage-your-network-effectively.html (accessed on 30 June 2016).
- Johnson, D.B.; Maltz, D.A. Dynamic Source Routing in Ad Hoc Networks. In Mobile Computing; Imieliński, T., Korth, H.F., Eds.; Kluwer Acdamic Publisher: Dordrecht, The Netherlands, 1996; pp. 153–181. [Google Scholar]
- Cisco. Mobile Ad Hoc Networking. Available online: http://www.cisco.com/c/en/us/products/ios-nx-os-software/mobile-ad-hoc-networking/index.html (accessed on 30 June 2016).
- IEEE. IEEE 802.11™: Wireless LANs, 2016. Available online: http://standards.ieee.org/about/get/802/802.11.html (accessed on 30 June 2016).
- Tseng, Y.C.; Hsu, C.S.; Hsieh, T.Y. Power-saving protocols for IEEE 802.11-based multi-hop ad hoc networks. Comput. Netw. 2003, 43, 317–337. [Google Scholar] [CrossRef]
- Gossain, H.; Nandiraju, N.; Anand, K.; Agrawal, D.P. Supporting MAC Layer Multicast in IEEE 802.11 based MANETs: Issues and Solutions. In Proceedings of the 29th Annual IEEE International Conference on Local Computer Networks (LCN’04), Tampa, FL, USA, 16–18 November 2004. [Google Scholar]
- Dureja, A.; Dureja, A.; Khera, M. IEEE 802.11 Based MAC Improvements for MANET. IJCA Spec. Issue MANETs 2010, 2, 54–57. [Google Scholar] [CrossRef]
- Patheja, P.S.; Tiwari, V.; Waoo, A.A. An Adaptive MAC 802.11 Protocol for MANET Using Exponential Algorithm. Int. J. Comput. Sci. Inf. Technol. IJCSIT. 2013, 4, 358–362. [Google Scholar]
- Cavilla, A.L.; Baron, G.; Hart, T.E.; Litty, L.; de Lara, E. Simplified Simulation Models for Indoor MANET Evaluation are not Robust. In Proceedings of the First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks (IEEE SECON 2004), Santa Clara, CA, USA, 4–7 October 2004; pp. 610–620. [Google Scholar]
- Munjal, A.; Camp, T.; Navidi, W.C. Constructing rigorous MANET simulation scenarios with realistic mobility. In Proceedings of the European Wireless Conference (EW), Lucca, Italy, 12–15 April 2010. [Google Scholar] [CrossRef]
- Sommer, C.; Dietrich, I.; Dressler, F. Realistic Simulation of Network Protocols in VANET Scenarios. In Proceedings of the IEEE Mobile Networking for Vehicular Environments, Anchorage, AK, USA, 1–11 May 2007. [Google Scholar]
- Lan, K.C.; Chou, C.M. Realistic mobility models for Vehicular Ad hoc Network (VANET) simulations. In Proceedings of the 8th International Conference on ITS Telecommunications (ITST 2008), Phuket, Thailand, 24 October 2008. [Google Scholar] [CrossRef]
- Musolesi, M.; Mascolo, C. A Community Based Mobility Model for Ad Hoc Network Research. In Proceedings of the REALMAN’06, Florence, Italy, 26 May 2006. [Google Scholar]
- Papageorgiou, C.; Birkos, K.; Dagiuklas, T.; Kotsopoulos, S. Modeling human mobility in obstacle-constrained ad hoc networks. Ad Hoc Netw. 2012, 10, 421–434. [Google Scholar] [CrossRef]
- Jubin, J.; Tornow, J. The DARPA Packet Radio Network Protocols. Proc. IEEE 1987, 75, 21–32. [Google Scholar] [CrossRef]
- Perkins, C.E.; Bhagwat, P. Highly dynamic Destination-Sequenced Distance-Vector routing (DSDV) for mobile computers. In Proceedings of the conference on Communications Architectures, Protocols and Applications (SIGCOMM ‘94), London, UK, 31 August–2 September 1994; ACM: New York, NY, USA, 1994; pp. 234–244. [Google Scholar]
- Perkins, C.; Royer, E. Ad-hoc On-Demand Distance Vector Routing. In Proceedings of the 2nd IEEE Workshop on Mobile Computing Systems and Applications, New Orleans, LA, USA, 25–26 February 1999. [Google Scholar]
- Singh, B.; Baghla, S.; Monga, H. Mobility models based performance evaluation of AOMDV routing protocol of MANET. Int. J. Appl. Res. 2017, 3, 82–86. [Google Scholar]
- Bianchi, A.; Pizzutilo, S.; Vessio, G. Preliminary description of NACK-based ad-hoc On-demand Distance Vector routing protocol for MANETs. In Proceedings of the 2014 9th International Conference on Software Engineering and Applications (ICSOFT-EA), Vienna, Austria, 29–31 August 2014. [Google Scholar]
- Bianchi, A.; Pizzutilo, S.; Vessio, G. Comparing AODV and N-AODV Routing Protocols for Mobile Ad-hoc Networks. In Proceedings of the 13th International Conference on Advances in Mobile Computing and Multimedia (MoMM 2015), Brussels, Belgium, 11–13 December 2015; pp. 159–168, ISBN 978-1-4503-3493-8. [Google Scholar] [CrossRef]
- Bianchi, A.; Pizzutilo, S. Studying MANET through a Petri Net-based Model. In Proceedings of the 2010 IEEE Second International Conference on Evolving Internet, Valencia, Spain, 20–25 September 2010. [Google Scholar] [CrossRef]
- Bianchi, A.; Pizzutilo, S.; Vessio, G. Suitability of Abstract State Machines for Discussing Mobile Ad-hoc Networks. Glob. J. Adv. Softw. Eng. 2014, 1, 29–38. [Google Scholar]
- Lalanne, F.; Maag, S. DataMonitor-A Formal Approach for Passively Testing a MANET Routing Protocol. In Proceedings of the Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013. [Google Scholar] [CrossRef]
- Cavalli, A.; Maag, S.; de Oca, E.M.; Zaidi, F. A Formal Passive Testing Approach to test a MANET Routing Protocol. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications, PerCom, Galveston, TX, USA, 9–13 March 2009. [Google Scholar] [CrossRef]
- Borger, E.; Stark, R.F. Abstract State Machines: A Method for High-Level System Design and Analysis; Springer: New York, NJ, USA, 2003; ISBN 3540007024. [Google Scholar]
- Vessio, G. Reasoning about Properties with Abstract State Machines. Available online: http://www.disim.univaq.it/staf2015/wp-content/uploads/STAF15-DS_submission_1.pdf (accessed on 18 March 2018).
- Bianchi, A.; Pizzutilo, S.; Vessio, G. Applying Predicate Abstraction to Abstract State Machines. In Enterprise, Business-Process and Information Systems Modeling; Gaaloul, K., Schmidt, R., Nurcan, S., Guerreiro, S., Ma, Q., Eds.; CAISE 2015, Lecture Notes in Business Information Processing; Springer: Cham, Switzerland; Volume 214. [CrossRef]
- IEFT. (n.d.) MANET Status Page. Retrieved 09 30, 2013 from IEFT Tools. Available online: http://tools.ietf.org/wg/manet/charters (accessed on 25 April 2018).
- Antonakkais, M. Re: [manet] Real-Life Deployment of MANETs, 2007. Retrieved IEFT MANET Mailing List Archive. Available online: https://www.ietf.org/mail-archive/web/manet/current/msg09031.html (accessed on 14 July 2016).
- Buraiky, S. Re: [manet] MANET APPLICATION IN Business, 2008. Retrieved from IEFT MANET Mailing List Archive. Available online: http://www.ietf.org/mail-archive/web/manet/current/msg10488.html (accessed on 14 July 2016).
- Buddenberg, R. Re: [manet] Deployment Experience, 2011. Retrieved from IEFT MANET Mailing List Archive. Available online: http://www.ietf.org/mail-archive/web/manet/current/msg11985.html (accessed on 14 July 2016).
- Caballero-Gil, C.; Caballero-Gil, P.; Molina-Gil, J. Mutual authentication in self organized VANETs. Comput. Stand. Interfaces 2014, 36, 704–710. [Google Scholar] [CrossRef]
- Hoebeke, J.; Moerman, I.; Dhoedt, B.; Demeester, P. An Overview of Mobile Ad Hoc Networks: Applications and Challenges. 2004. Available online: http://cwi.unik.no/images/Manet_Overview.pdf (accessed on 14 July 2016).
- Conti, M.; Giordano, S. Multihop Ad Hoc Networking: The Reality. IEEE Commun. Mag. 2007, 45, 88–95. [Google Scholar] [CrossRef]
- Monarch Project. Monarch Project, 2004. Available online: http://www.cs.cmu.edu/~./dbj/mobile.html (accessed on 14 July 2016).
- Rajabhushanam, C.; Kathirvel, A. Survey of Wireless MANET Application in Battlefield Operations. Int. J. Adv. Comput. Sci. Appl. IJACSA. 2011, 2, 50–58. [Google Scholar] [CrossRef]
- Atherton, A.D. Darpa Wants To Build A Better Battlefield Internet, 2013. Available online: http://www.popsci.com/technology/article/2013-04/darpa-wants-build-better-battlefield-internet (accessed on 14 July 2016).
- Barker, D. (nd). Bringing Mobile Ad Hoc Networks to the Battlefield Using COTS Open Standards, EE Catalogue. Available online: http://www.xes-inc.com/assets/files_indexed/145006_MANETMil-AeroGuide2012.pdf (accessed on 14 July 2016).
- Lu, X.; Chen, Y.C.; Leung, I.; Xiong, Z.; Liò, P. A Novel Mobility Model from a Heterogeneous Military MANET Trace. In Proceedings of the 7th International Conference (ADHOC-NOW 2008), Sophia Antipolis, France, 10–12 September 2008; pp. 463–474. [Google Scholar]
- Vegni, A.M.; Biagi, M.; Cusani, R. Chapter 1: Smart Vehicles, Technologies and Main Applications in Vehicular Ad hoc Networks. InTech 2013. [Google Scholar] [CrossRef]
- Kumar, V.; Chand, N. Applications of VANETs: Present & Future. J. Commun. Netw. 2013, 5, 12–15. [Google Scholar] [CrossRef]
- Aschenbruck, N.; Ernst, R.; Gerhards-Padilla, E.; Schwamborn, M. BonnMotion—A Mobility Scenario Generation and Analysis Tool. In Proceedings of the 3rd International ICST Conference on Simulation Tools and Techniques, Malaga, Spain, 15–19 March 2010. [Google Scholar] [CrossRef]
- Kiess, W.; Mauve, M. A survey on real-world implementations of mobile ad-hoc networks. Ad Hoc Netw. 2007, 5, 324–339. [Google Scholar] [CrossRef]
- Maltz, D.A.; Broch, J.; Johnson, D. Experiences Designing and Building a Multi-Hop Wireless Ad Hoc Network Testbed, 1999. Carnegie Mellon University, School of Computer Science. Carnegie Mellon University: Pittsburg. Available online: http://www.monarch.cs.rice.edu/monarch-papers/CMU-CS-99-116.ps (accessed on 14 July 2016).
- Lundgren, H.; Lundberg, D.; Nielsen, J.; Nordstrom, E.; Tschudin, C. A Large Scale Testbed for Reproducible Ad Hoc Protocol Evaluations. In Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC’02), Orlando, FL, USA, 17–21 March 2002. [Google Scholar]
- Gray, R.S.; Kotz, D.; Newport, C.C.; Dubrovsky, N.; Fiske, A.; Liu, J.; Masone, C.; McGrath, S.; Yuan, Y. Outdoor experimental comparison of four ad hoc routing algorithms. In In Proceedings of the 7th ACM International Symposium on Modelling, Analysis and Simulation of Wireless and Mobile Systems, Venice, Italy, 4–6 October 2004; ACM Press: New York, NY, USA, 2004. [Google Scholar]
- Saha, A.; To, K.; Chaudhuri, S.; Du, S.; Johnson, D. Physical Implementation and Evaluation of Ad Hoc Network Routing Protocols using Unmodified Simulation Models. In Proceedings of the SIGCOM Asia Workshop, Beijing, China, 12–14 April 2005. [Google Scholar]
- APE. Ad Hoc Protocol Evaluation, 2002. Available online: http://apetestbed.sourceforge.net/ (accessed on 14 July 2016).
- Tschudin, C.; Gunningberg, P.; Lundgren, H.; Nordstrom, E. Lessons from experimental MANET research. Ad Hoc Netw. 2005, 3, 221–233. [Google Scholar] [CrossRef]
- Noubir, G.; Qian, W.; Thapa, B.; Wang, Y. Experimentation-oriented platform for development and evaluation of MANET cross-layer protocols. Ad Hoc Netw. 2009, 7, 443–459. [Google Scholar] [CrossRef]
- Lopez, P.G.; Tinedo, R.l.; Alsina, J.M. Moving routing protocols to the user space in MANET middleware. J. Netw. Comput. Appl. 2010, 33, 588–602. [Google Scholar] [CrossRef]
- Kulla, E.; Hiyamaa, M.; Ikeda, M.; Barolli, L. Performance comparison of OLSR and BATMAN routing protocols by a MANET testbed in stairs environment. Comput. Math. Appl. 2012, 63, 339–349. [Google Scholar] [CrossRef]
- Biaz, S.; Miller, C.; Walstad, C. Creating Virtually Mobile Nodes for Testing Ad hoc Routing Protocols. In Proceedings of the 2005 International Conference on Wireless Networks (ICWN’05), Las Vegas, NV, USA, June 2005; pp. 92–98. [Google Scholar]
- Hortelano, J.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. Testing Applications in MANET Environments through Emulation. EURASIP J. Wirel. Commun. Netw. 2009, 2009. [Google Scholar] [CrossRef]
- Kim, Y.; Taylor, K.; Dunbar, C.; Walker, B.; Mundur, P. Reality vs emulation: Running real mobility traces on a mobile wireless testbed hotplanet2011. In Proceedings of the 3rd ACM International Workshop on MobiArch (HotPlanet ‘11), Bethesda, MD, USA, 28 June 2011; ACM: New York, NY, USA; pp. 23–28. [Google Scholar]
- Breslau, L.; Estrin, D.; Fall, K.; Floyd, S.; Heidemann, J.; Helmy, A.; Huang, P.; McCanne, S.; Varadhan, K.; Xu, Y.; et al. Advances in Network Simulation. Computer 2000, 33, 59–67. [Google Scholar] [CrossRef]
- Cavin, D.; Sasson, Y.; Schiper, A. On the Accuracy of MANET Simulators. In ACM POMC’02; ACM Press: Toulouse, France, 2002; pp. 38–43. [Google Scholar]
- Kurkowski, S.; Camp, T.; Colagrosso, M. MANET Simulation Studies: The Incredibles. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2005, 9, 50–61. [Google Scholar] [CrossRef]
- Andel, T.R.; Yasinsac, A. On the credibility of manet simulations. Computer 2006, 39, 48–54. [Google Scholar] [CrossRef]
- Martinez, F.J.; Toh, C.K.; Cano, J.-C.; Calafate, C.T.; Manzoni, P. A survey and comparative study of simulators for vehicular ad hoc networks (VANETs). Wirel. Commun. Mob. Comput. 2009, 11, 1189–1212. [Google Scholar] [CrossRef]
- Rivas, D.; Guerrero-Zapata, M. Simulation of points of interest distribution in vehicular networks. Simul. Trans. Soc. Model. Simul. Int. 2012, 88, 1390–1404. [Google Scholar] [CrossRef]
- Meghanathan, N.; Thompson, J. On the Different Forms of Spanning Tree-based Broadcast Topologies for Mobile Ad hoc Networks. Int. J. Comb. Optim. Probl. Inform. 2013, 4, 3–11. [Google Scholar]
- Mallapur, S.V.; Patil, S.R. Survey on Simulation Tools for Mobile Ad-Hoc Networks. Int. J. Comput. Netw. Wirel. Commun. IJCNWC. 2012, 2, 241–248. [Google Scholar]
- Kumar, A.; Kaushik, S.; Sharma, R.; Raj, P. Simulators for Wireless Networks: A Comparative Study. In Proceedings of the 2012 IEEE International Conference on Computing Sciences (ICCS), Phagwara, India, 14–15 September 2012; pp. 338–342. [Google Scholar]
- Kabir, M.H.; Islam, S.; Hossain, M.J.; Hossain, S. Detail Comparison of Network Simulators. Int. J. Sci. Eng. Res. 2014, 5, 203–218. [Google Scholar]
- Hogie, L.; Bouvry, P.; Guinand, F. An Overview of MANETs Simulation. Electron. Notes Theor. Comput. Sci. 2006, 150, 81–101. [Google Scholar] [CrossRef]
- Broch, J.; Maltz, D.A.; Johnson, D.B.; Hu, Y.-C.; Jetcheva, J. A Performance Comparison of Multi-Hop Wireless Ad Hoc Network Routing Protocols. In Proceedings of the Fourth Annual ACM/IEEE International Conference on Mobile Computing and Networking (MobiCom’98), Dallas, TX, USA, 25–30 October 1998; ACM/IEEE: Dallas, TX, USA, 1998. [Google Scholar]
- Perkins, C.E.; Royer, E.M.; Das, S.R.; Marina, M.K. Performance comparison of two on-demand routing protocols for ad hoc networks. IEEE Pers. Commun. 2001, 8, 16–28. [Google Scholar] [CrossRef]
- Camp, T.; Boleng, J.; Davies, V. A Survey of MANET Routing Protocols in Mobility Models. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Song, L.; Kotz, D.F. Evaluating Opportunistic Routing Protocols with Large Realistic Contact Traces. In Proceedings of the Second ACM workshop on Challenged Networks (CHANTS 2007), Montreal, QC, Canada, 14 September 2007; ACM: New York, NY, USA; pp. 35–42. [Google Scholar]
- Bazzi, A.; Pasolini, G. On the accuracy of physical layer modelling within wireless network simulators. Simul. Model. Pract. Theory 2012, 22, 47–60. [Google Scholar] [CrossRef]
- Divecha, B.; Abraham, A.; Grosan, C.; Sanyal, S. Impact of Node Mobility on MANET Routing Protocols Models. J. Digital Inf. Manag. 2007, 5, 19–24. [Google Scholar]
- Johnson, D.B.; Maltz, D.A. Dynamic Source Routing in Ad Hoc Wireless Networks, 2007. Available online: http://www.cs.colorado.edu/~rhan/CSCI_7143_Fall_2007/Papers/Johnson96_DSR.pdf (accessed on 14 July 2016).
- Festag, A.; Papadimitratos, P.; Tielert, T. Design and Performance of Secure Geocast for Vehicular Communication. IEEE Trans. Veh. Technol. 2010, 59, 2456–2471. [Google Scholar] [CrossRef]
- Oliveira, R.; Luís, M.; Furtado, A.; Bernardo, L.; Dinis, R.; Pinto, P. Improving path duration in high mobility vehicular ad hoc networks. Ad Hoc Netw. 2013, 11, 89–103. [Google Scholar] [CrossRef]
- Reina, D.; Marín, S.T.; Bessisb, N.; Barrero, F.; Asimakopoulou, E. An evolutionary computation approach for optimizing connectivity in disaster response scenarios. Appl. Soft Comput. 2013, 13, 833–845. [Google Scholar] [CrossRef]
- Reina, D.; Toral, S.; Barrero, F.; Bessis, N.; Asimakopoulou, E. Modelling and assessing ad hoc networks in disaster scenarios. J. Ambient Intell. Hum. Comput. 2013, 4, 571–579. [Google Scholar] [CrossRef]
- Bernsen, J.; Manivannan, D. RIVER: A reliable inter-vehicular routing protocol for vehicular ad hoc networks. Comput. Netw. 2012, 56, 3795–3807. [Google Scholar] [CrossRef]
- Patel, R.; Kamboj, P. Investigation of Network Simulation Tools and Comparison Study: NS3 vs NS2. J. Netw. Commun. Emerg. Technol. JNCET 2015, 5, 137–142. [Google Scholar]
- Katkar, P.S.; Ghorpade, V.R. Comparative Study of Network Simulator: NS2 and NS3. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2016, 6, 608–612. [Google Scholar]
- Saluja, A.K.; Dargad, S.A.; Mistry, K. A Detailed Analogy of Network Simulators—NS1, NS2, NS3 and NS4. Int. J. Future Revolut. Comput. Sci. Commun. Eng. 2017, 3, 291–295. [Google Scholar]
- Ns 3 Simulations. (nd). NS3 Manet Simulation. Available online: http://ns3simulation.com/ns3-manet-simulation/ (accessed on 13 April 2018).
- Midha, S.; Hemrajani, N. Performance Analysis of AODV & OLSR for MANET. Int. J. Eng. Res. Tech. (IJERT) 2013, 2, 1–5. [Google Scholar]
- Rajankumar, P.; Nimisha, P.; Kamboj, P. A Comparative Study and Simulation of AODV MANET Routing Protocol in NS2 & NS3. In Proceedings of the IEEE International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 5–7 March 2014. [Google Scholar]
- Singla, S.; Jain, S. Performance Comparison of Routing Protocols of MANET in Real World Scenario using NS3. Int. J. Comput. Appl. (0975-8887) 2014, 99, 17–23. [Google Scholar] [CrossRef]
- Jha, R.K.; Kharga, P. A Comparative Performance Analysis of Routing Protocols in MANET using NS3 Simulator. Int. J. Comput. Netw. Inf. Secur. 2015, 4, 62–68. [Google Scholar] [CrossRef]
- Kaur, A.; Gupta, A.K. Performance Evaluation of AODV and DSDV using NS-3. Int. J. Innov. Eng. Technol. 2016, 6, 560–563. [Google Scholar]
- Mai, Y.; Bai, Y.; Wang, N. Performance Comparison and Evaluation of the Routing Protocols for MANETs Using NS3. J. Electr. Eng. 2017, 5, 187–195. [Google Scholar] [CrossRef][Green Version]
- Karanati, R.R.M.R.; Komaragiri, R.R.; Singari, S.; Geda, B.S.; Bethina, L.A.; Yerubandi, C.R. Packet Receiving Rate Analysis in Various Manet Protocols Using NS-3. Int. J. Pure Appl. Math. 2017, 116, 179–184. [Google Scholar]
- Aschenbruck, N.; Munjal, A.; Camp, T. Trace-based mobility modeling for multi-hop wireless networks. Comput. Commun. 2011, 34, 704–714. [Google Scholar] [CrossRef]
- Krug, S.; Siracusa, M.F.; Schellenberg, S.; Begerow, P.; Seitz, J.; Finke, T.; Schroeder, J. Movement Patterns for Mobile Networks in Disaster Scenarios. In Proceedings of the IEEE 15th International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Sydney, NSW, Australia, 19 June 2014. [Google Scholar] [CrossRef]
- Helgason, O.; Kouyoumdjieva, S.T.; Karlsson, G. Does Mobility Matter? In Proceedings of the 2010 Seventh International Conference on Wireless On-demand Network Systems and Services (WONS), Kranjska Gora, Slovenia, 3–5 February 2010. [Google Scholar] [CrossRef]
- Aravind, A.; Tahir, H. Towards Modeling Realistic Mobility for Performance Evaluations in MANET. In Ad-Hoc, Mobile and Wireless Networks; Nikolaidis, I., Wu, K., Eds.; ADHOC-NOW 2010, Lecture Notes in Computer Science; Springer: Berlin, Germany, 2010; Volume 6288. [Google Scholar] [CrossRef]
- Aschenbruck, N.; Gerhards-Padilla, E.; Martini, P. Modeling mobility in disaster area scenarios. Perform. Eval. 2009, 66, 773–790. [Google Scholar] [CrossRef]
- Nelson, S.C.; Harris, A.F., III; Kravets, R. Event-driven, role-based mobility in disaster recovery networks. In Proceedings of the second ACM workshop on Challenged Networks (CHANTS 2007), Montreal, QC, Canada, 14 September 2007; ACM Press: New York, NY, USA, 2007; pp. 27–34. [Google Scholar] [CrossRef]
- Lu, G.; Manson, G.; Belis, D. Mobility Modeling in Mobile Ad Hoc Networks with Environment-Aware. J. Netw. 2006, 1, 54–63. [Google Scholar] [CrossRef]
- Karnadi, F.K.; Mo, Z.H.; Lan, K.C. Rapid Generation of Realistic Mobility Models for VANET. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference (WCNC), Kowloon, China, 11–15 March 2007. [Google Scholar] [CrossRef]
- Ekman, F.; Keränen, A.; Karvo, J.; Ott, J. Working Day Movement Model. In Proceedings of the 1st ACM SIGMOBILE Workshop on Mobility Models (MobilityModels 2008), Hong Kong, China, 26 May 2008; pp. 33–40. [Google Scholar] [CrossRef]
- Fogue, M.; Garrido, P.; Martinez, F.; Cano, J.-C.; Calafate, C.; Manzoni, P. Identifying the Key Factors Affecting Warning Message Dissemination in VANET Real Urban Scenarios. Sensors 2013, 13, 5220–5250. [Google Scholar] [CrossRef] [PubMed]
- Zafar, H.; Zuhairi, M.; Harle, D.; Andonovic, I. A Review of Techniques for the Analysis of Simulation Output. IETE Tech. Rev. 2012, 29, 223–228. [Google Scholar]
- Xia, Y.; Yeo, C.K. Mitigating the impact of node mobility using mobile backbone for heterogeneous MANETs. Comput. Commun. 2012, 35, 1217–1230. [Google Scholar] [CrossRef]
- Kori, P.; Sharma, S. An Effect of Route Caching Scheme in DSR for Vehicular Adhoc Networks. Int. J. Comput. Sci. Eng. 2012, 4, 35–39. [Google Scholar]
- Alshanyour, A.; Baroudi, U. A Simulation Study: The Impact of Random and Realistic Mobility Models on the Performance of Bypass-AODV in Ad Hoc Wireless Networks. EURASIP J. Wirel. Commun. Netw. 2010. [CrossRef]
- Das, S.; Lobiyal, D. Effect of Realistic Vehicular Traces on the Performance of Broadcasting Techniques in Vehicular Ad Hoc Networks. Res. J. Appl. Sci. Eng. Technol. 2012, 4, 3493–3500. [Google Scholar]
- Boukerche, A. Performance Evaluation of Routing Protocols for Ad Hoc Wireless Networks. Mob. Netw. Appl. 2004, 9, 333–342. [Google Scholar] [CrossRef]
- Uzoh, C.C.; Onubogu, J.; Akpado, K. Analysis and Optimization of Dynamic Source Routing Protocol for Wireless Mobile Ad Hoc Networks. IUP J. Telecommun. 2012, 4, 44–68. [Google Scholar]
- Sharma, Y.M.; Mukherjee, S. Comparative Performance Exploration of AODV, DSDV & DSR Routing Protocol in Cluster Based VANET Environment. Int. J. Adv. Eng. Technol. IJAET 2012, 4, 120–127. [Google Scholar]
- Rani, N.; Sharma, P.; Sharma, P. Performance Comparison of Various Routing Protocols in Different Mobility Models. Int. J. Ad-Hoc Sens. Ubiquitous Comput. IJASUC 2012, arXiv:1209.55073. [Google Scholar] [CrossRef]
- Zhou, B.; Xu, K.; Gerla, M. Group and swarm mobility models for ad hoc network scenarios using virtual tracks. In Proceedings of the 2004 IEEE Military Communications Conference (MILCOM04), Monterey, CA, USA, 31 October–3 November 2004. [Google Scholar]
- Seah, W.; Lee, F.; Mock, K.; Ng, E.; Kwek, M. Mobility modeling of rush hour traffic for multihop routing in mobile wireless networks. In Proceedings of the IEEE Vehicular Technology Society Fall 2006, Montreal, QC, Canada, 25–28 September 2006. [Google Scholar]
- nS2. (nd). User Information. Available online: http://nsnam.sourceforge.net/wiki/index.php/User_Information (accessed on 14 July 2016).
- Aljebori, S.; Taima, A. Best Selection of Mobility Model for MANET Using NS-2. Orient. J. Comput. Sci. Technol. 2013, 6, 31–40. [Google Scholar]
- Agrawal, C.; Vyas, O.; Tiwari, M. Evaluation of Varying Mobility Models & Network Loads on DSDV Protocol of MANETs. Int. J. Comput. Sci. Eng. (IJCSE) 2009, 1, 40–46. [Google Scholar]
- Ray, S.; La Porta, T.; Basu, P.; Cao, G. Metric driven mobility modeling in Tactical Networks. J. Def. Model. Simul. Appl. Methodol. Technol. 2013, 10, 161–179. [Google Scholar] [CrossRef]
- Zuhairi, M.; Zafar, H.; Harle, D. The Impact of Mobility Models on the Performance of Mobile Ad Hoc Network Routing Protocol. IETE Tech. Rev. 2012, 29, 414–420. [Google Scholar] [CrossRef]
- Periyasamy, P.; Karthikeyan, E. A simulation based QoS review of multipath routing protocols for MANET. Int. J. Adv. Netw. Appl. 2012, 4, 1624–1634. [Google Scholar]
- Yoon, J.; Liu, M.; Nobel, B. Random Waypoints Considered Harmful. In Proceedings of the Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE INFOCOM 2003), San Francisco, CA, USA, 30 March–3 April 2003. [Google Scholar]
- Sanchez, M.; Manzoni, P. A java based simulator for ad-hoc networks. Future Gener. Comput. Syst. 2001, 17, 573–583. [Google Scholar] [CrossRef]
- Royer, E.M.; Melliar-Smith, P.M.; Moser, L.E. An analysis of the optimum node density for ad hoc mobile networks. In Proceedings of the IEEE International Conference on Communications, Helsinki, Finland, 11–14 June 2001; pp. 857–861. [Google Scholar]
- Haas, Z.J. A New Routing Protocol for the Reconfigurable Wireless Networks. In Proceedings of the 6th IEEE International Conference on Universal Personal Communications, San Diego, CA, USA, USA, 12–16 October 1997; pp. 562–566. [Google Scholar]
- Liang, B.; Haas, Z. Predictive distance-based mobility management for Multidimensional PCS Networks. IEEE/ACM Trans. In Netw. 2003, 11, 718–732. [Google Scholar] [CrossRef]
- Torkestani, J.A. Mobility prediction in mobile wireless networks. J. Netw. Comput. Appl. 2012, 35, 1633–1645. [Google Scholar] [CrossRef]
- Clementi, A.; Monti, A.; Silvestri, R. Modelling Mobility: A Discrete Revolution. Ad Hoc Netw. 2011, 9, 998–1014. [Google Scholar] [CrossRef]
- Cano, J.C.; Calafate, C.; Manzoni, P.; Toh, C.K. Modeling of mobility and groups in inter-vehicular MANET-based networks. In Proceedings of the 2nd International Symposium on Wireless Pervasive Computing (ISWPC ‘07), San Juan, Puerto Rico, 5–7 February 2007. [Google Scholar]
- Jayakumar, G.; Gopinath, G. Performance Comparison of MANET Protocols Based on Manhattan Grid Mobility Model. J. Mob. Commun. 2008, 2, 18–26. [Google Scholar]
- Bai, F.; Sadagopan, N.; Helmy, A. Important: A framework to systematically analyze the impact of mobility on performance of routing protocols for adhoc networks. Proccedings of the Twenty-Second Annual Joint Conference of the IEEE Computer and Communications (IEEE INFOCOM), San Francisco, CA, USA, 30 March–3 April 2003; pp. 825–835. [Google Scholar]
- Blakely, K.; Lowekamp, B. A structured group mobility model for the simulation of mobile ad hoc networks. In Proceedings of the International Conference on Mobile Computer Networks, Philadelphia, PA, USA, 1 October 2004; pp. 111–118. [Google Scholar]
- CRAWDAD. Retrieved from CRAWDAD. 2008. Available online: http://crawdad.cs.dartmouth.edu/ (accessed on 25 April 2018).
- Helmy, A. (n.d.). MobiLib: Community-wide Library of Mobility and Wireless Networks Measurements. Retrieved from MobiLib. Available online: http://www.cise.ufl.edu/~helmy/MobiLib.htm (accessed on 14 July 2016).
- Gerla, M.; Weng, J.-T.; Giordano, E.; Pau, G. Vehicular Testbeds—Model Validation before Large Scale Deployment. J. Commun. 2012, 7, 451–457. [Google Scholar] [CrossRef]
- Citeulike. (nd). CiteULike Group: CRAWDAD library. Available online: http://www.citeulike.org/group/5303/library (accessed on 14 July 2016).
- Chipara, O.; Griswold, W.G.; Plymoth, A.N.; Huang, R.; Liu, F.; Johansson, P.; Rao, R.; Chan, T.C.; Buono, C. WIISARD: A measurement study of network properties and protocol reliability during an emergency response. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services (MobiSys ‘12), Low Wood Bay, Lake District, UK, 25–29 June 2012; ACM Press: New York, NY, USA, 2012; pp. 407–420. [Google Scholar]
- Zhu, X.; Bai, Y.; Yang, W.; Peng, Y.; Bi, C. SAME: A students’ daily activity mobility model for campus delay-tolerant networks. In Proceedings of the 18th Asia-Pacific Conference on Communications (APCC 2012), Jeju Island, Korea, 15–17 October 2012; pp. 528–533. [Google Scholar]
- Mehta, P.; Voisard, A. Analysis of User Mobility Data Sources for Multi-User Context Modeling. In Proceedings of the 1st ACM SIGSPATIAL International Workshop on Crowdsourced and Volunteered Geographic Information (ACM SIGSPATIAL GEOCROWD ’12), Redondo Beach, CA, USA, 6 November 2012; ACM: New York, NY, USA, 2012; pp. 9–14. [Google Scholar]
- Jetcheva, J.; Hu, Y.-C.; Pal, S.; Amit, C.; Saha, K.; Johnson, D.B. Design and Evaluation of a Metropolitan Area Multitier Wireless Ad Hoc Network Architecture. In Proceedings of the 5th IEEE Workshop on Mobile Computing Syst. & Applications (WMCSA 2003), Monterey, CA, USA, 9–10 October 2003. [Google Scholar] [CrossRef]
- Maeda, K.; Sato, K.; Konishi, K.; Yamasaki, A.; Uchiyama, A.; Yamaguchi, H.; Yasumoto, K.; Higashino, T. Getting Urban Pedestrian Flow from Simple Observation: Realistic Mobility Generation in Wireless Network Simulation. In Proceedings of the 8th ACM/IEEE International Symposium on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM 2005), Montréal, QC, Canada, 10–13 October 2005; ACM: New York, NY, USA, 2005. [Google Scholar]
- Huang, H.; Zhang, D.; Zhu, Y.; Li, M.; Wu, M. A Metropolitan Taxi Mobility Model from Real GPS Traces. J. Univ. Comput. Sci. 2012, 18, 1072–1092. [Google Scholar]
- Munjal, A.; Camp, T.; Aschenbruck, N. Changing Trends in Modeling Mobility. J. Electr. Comput. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- Boukerche, Z.; Turgut, B.; Aydin, N.; Ahmad, M.Z.; Bölöni, L.; Turgut, D. Routing protocols in ad hoc networks: A survey. Comput. Netw. 2011, 55, 3032–3080. [Google Scholar] [CrossRef]
- Yuvaraj, N.; Nandhini, A.; Vivekanandan, P. A Survey on Energy Efficient Routing Protocols for MANET. Int. J. Adv. Eng. Technol. IJAET 2013, 6, 370–380. [Google Scholar]
- Bilal, S.M.; Bernardos, C.; Guerrero, C. Position-based routing in vehicular networks: A survey. J. Netw. Comput. Appl. 2013, 36, 685–697. [Google Scholar] [CrossRef]
- Dong, P.; Qian, H.; Wei, X.; Lan, S.; Pu, C. A Beacon-Less Geographic Multipath Routing Protocol for Ad Hoc Networks. Mob. Netw. Appl. 2013, 18, 500–512. [Google Scholar] [CrossRef]
- Zhao, P.; Yang, X.; Yu, W.; Fu, X. A Loose-Virtual-Clustering-Based Routing for Power Heterogeneous MANETs. IEEE Trans. Veh. Technol. 2013, 62, 2290–2302. [Google Scholar] [CrossRef]
- Network Simulators. AWK Scripts for NS2 to process data from Trace Files, 2013. Available online: http://www.nsnam.com/2013/03/awk-scripts-for-ns2-to-process-data.html (accessed on 14 July 2016).
- Sadasivam, K.; Changrani, V.; Yang, T. Scenario based performance evaluation of secure routing in MANETs. In Proceedings of the 2nd International Workshop on Mobile Ad Hoc Networks and Interoperability Issues MANETII’05, Las Vegas, NV, USA, 27–30 June 2005. [Google Scholar]
- Naumov, V.; Baumann, R.; Gross, T. An Evaluation of Inter Vehicle Ad Hoc Networks Based on Realistic Vehicular Traces. In Proceedings of the ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc 2006), Florence, Italy, 22–25 May 2006; ACM Press: New York, NY, USA, 2006; pp. 108–119. [Google Scholar]
- Radwan, A.; Mahmoud, T.; Houssein, E. Evaluation comparison of some ad hoc networks routing protocols. Egypt. Inform. J. 2011, 12, 95–106. [Google Scholar] [CrossRef][Green Version]
- Dhanapal, J.; Srivatsa, S. Link quality-based cache replacement technique in mobile ad hoc network. IET Inf. Secur. 2013, 7, 277–282. [Google Scholar] [CrossRef]
- Kamal, J.; Hasan, M.; Griffiths, A.; Yu, H. Development and Verification of Simulation Model Based on Real MANET Experiments for Transport Layer Protocols (UDP and TCP). Int. J. Autom. Comput. 2013, 10, 53–63. [Google Scholar] [CrossRef][Green Version]
- Farrimond, B.; Parkinson, L.; Pogson, F. Teaching with Dynamic Maps on the Web. In Proceedings of the BITE 2001, Conference for Information Technology in Higher Education, Eindhoven, The Netherlands, 22–24 November 2001. 2001. [Google Scholar]
- Farrimond, B.; Parkinson, L.; Pogson, F. Modelling History with XML. In DRH 2001 and 2002 Selected Papers from the Digital Resources for the Humanities Conferences 2001 and 2002; Anderson, J., Dunning, A., Fraser, M., Eds.; Office for Humanities Communication: London, UK, 2003. [Google Scholar]
- Chellappa Doss, R.; Jennings, A.; Shenoy, N. A Review of Current Mobility Prediction Techniques for Ad Hoc Networks. In Proceedings of the 4th IASTED International multi-conference Wireless and Optical Communications, Banff, AB, Canada, 8–10 July 2004; ACTA Press: Banff, AB, Canada, 2004. [Google Scholar]
- Bai, F.; Helmy, A. Chapter 1: A Survey of Mobility Models in Wireless Ad Hoc and Sensor Networks, 2004. Available online: http://www.cise.ufl.edu/~helmy/papers/Survey-Mobility-Chapter-1.pdf (accessed on 14 July 2016).
- Jayakumar, G.; Ganapathi, G. Reference Point Group Mobility and Random Waypoint Models in Performance Evaluation of MANET Routing Protocols. J. Comput. Syst. Netw. Commun. 2008, 2008. [Google Scholar] [CrossRef]
- Amamd, D.K.; Prakash, S. Design an Energy Efficient DSDV Routing Protocol for Mobile Ad Hoc Network. Int. J. Adv. Eng. Technol. 2012, 5, 526–535. [Google Scholar]
- Jahani, E.; Esmaeili, T.; Khorshidi, S.; Mirabizadeh, R. Provide a Method to Prediction of Nodes Movement to Optimize Routing Algorithms in Ad Hoc Networks. Int. J. Comput. Sci. Eng. 2012, 4, 1260–1264. [Google Scholar]
- Perkins, C.; Belding-Royer, E. Ad hoc On-Demand Distance Vector (AODV) Routing, 2003. RFC3561. 2003. Available online: https://dl.acm.org/citation.cfm?id=RFC3561. IETF.
- Ryu, B.; Andersen, T.; Elbatt, T. Multi-tier mobile ad hoc routing. In Proceedings of the IEEE Vehicular Technology Conference, Orlando, FL, USA, 6–9 October 2003; pp. 1280–1285. [Google Scholar]
- Choi, J.M.; Ko, Y.B. A Performance Evaluation for Ad Hoc Routing Protocols in Realistic Military Scenarios. In Proceedings of the 9th International Conference on Cellular and Intelligent Communications (CIC2004), Seoul, Korea, 25–28 October 2004. [Google Scholar]
- Hsu, J.; Bhatia, S.; Takai, M.; Bagrodia, R.; Acriche, M. Performance of Mobile Ad Hoc Networking Routing Protocols in Large Scale Scenarios. Proceedings of IEEE Military Communications Conference (MILCOM), Monterey, CA, USA, 31 October–3 November 2004; Volume 1, pp. 21–27. [Google Scholar]
- US Army. FM 71-100—Division Operations. Washington DC, USA, 1996. Available online: http://www.globalsecurity.org/military/library/policy/army/fm/71-100/ref.htm (accessed on 14 July 2016).
- Gerla, M. From battlefields to urban grids: New research challenges in ad hoc wireless networks. Pervasive Mob. Comput. 2005, 1, 77–93. [Google Scholar] [CrossRef]
- Hong, X.; Gerla, M.; Pei, G.; Chiang, C.-C. A group mobility model for ad hoc wireless networks. In Proceedings of the International Workshop on Modeling Analysis and Simulation of Wireless and Mobile Systems (MSWiM), Seattle, Washington, DC, USA, 20 August 1999; ACM Press: New York, NY, USA, 1999; pp. 53–60. [Google Scholar]
- Sacko, D.; Benxiong, H.; Furong, W.; Khider, I. A survey of group merge and split mobility models. Ubiquitous Comput. Commun. J. 2007, 2, 88–97. [Google Scholar]
- Szczodrak, M.; Kim, J.; Baek, Y. Two-Level ZigBee-4G Design for Secure and Efficient Communications in the Resources Constrained Military Environment. Int. J. Comput. Sci. Netw. Secur. 2007, 7, 14–29. [Google Scholar]
- Deepshikha, D.; Bhargava, S. Improving Multi-path AODV by Utilizing All Available Paths for a Small Tactical Network. Int. J. Eng. Tech. Res. (IJETR) 2014, 2, 101–104. [Google Scholar]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility Models for UAV group reconnaissance applications. In Proceedings of the International Conference on Wireless and Mobile Communications (ICWMC), Bucharest, Romania, 29–31 July 2006. [Google Scholar] [CrossRef]
- Kiwior, D.; Lam, L. Routing protocol performance over intermittent links, 2007. MITRE Technical Paper. MITRE. Available online: http://www.mitre.org/work/tech_papers/tech_papers_07/07_0778/07_0778.pdf (accessed on 14 July 2016).
- Sahingoz, O. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Jahnke, M.; Wenzel, A.; Klein, G.; Aschenbruck, N.; Gerhards-Padilla, E.; Ebinger, P.; Karsch, S. MITE—MANET Intrusion Detection for Tactical Environments. In Proceedings of the NATO/RTO Research Symposium on Information Assurance for Emerging and Future Military Systems (RSY IST-076), Ljubliana, Slovenia, 13–14 October 2008; NATO: Ljubliana, Slovenia, 2008. [Google Scholar]
- Pandey, M.; Verma, S. MAC Layer Performance: Study and Analysis for Different Mobility Conditions in WSN. Int. J. Wirel. Mob. Netw. (IJWMN) 2011, 3, 117–127. Available online: http://airccse.org/journal/jwmn/1211wmn09.pdf (accessed on 14 July 2016).
- Miles, J.; Kamath, G.; Muknahallipatna, S.; Stefanovic, M.; Kubichek, R. Optimal trajectory determination of a single moving beacon for efficient localization in a mobile ad-hoc network. Ad Hoc Netw. 2013, 11, 238–256. [Google Scholar] [CrossRef]
- NATO. Guide to Modelling & Simulation (M&S) for NATO Network-Enabled Capability (“M&S for NNEC”), 2012. North Atlantic Treaty Organisation (NATO). Available online: http://ftp.rta.nato.int/public//PubFullText/RTO/TR/RTO-TR-MSG-062///$$TR-MSG-062-ALL.pdf (accessed on 14 July 2016).
- Vijayavani, G.R.; Prema, G. Performance Comparison of MANET Routing Protocols with Mobility Model derived based on Realistic mobility pattern of Mobile Nodes. In Proceedings of the 2012 IEEE International Conference on Advanced Communication Control and Computing Technologies (ICACCCT), Ramanathapuram, India, 23–25 August 2012; pp. 32–36. [Google Scholar]
- US Army. Urban Combat Skills. In Combined Arms Operations in Urban Terrain, Field Manual No. 3-06.11; Department of the Army: Washington DC, USA, 28 February 2002. [Google Scholar]
- Taylor, P. Six Days That Shook Britain. The Guardian. Available online: https://www.theguardian.com/uk/2002/jul/24/military.features11 (accessed on 24 July 2002).
- CMU Monarch Project. The CMU Monarch Project’s Wireless and Mobility Extensions to ns; Computer Science Department, Carnegie Mellon University: Pittsburg, CA, USA, 1999. [Google Scholar]
- ns-2. (n.d.). Main_Page. Available online: http://nsnam.isi.edu/nsnam/index.php/Main_Page (accessed on 14 July 2016).
- Yoon, J.; Noble, B.; Liu, M.; Kim, M. Building realistic mobility models from course-grained traces. In Proceedings of the 4th International Conference on Mobile Systems, applications and services, Uppsala, Sweden, 19–22 June 2006; ACM: New York, NY, USA; pp. 177–190. [Google Scholar]
- Sridhar, K.; Hao, S.; Chan, M.; Ananda, A. EGRESS: Environment for generating realistic scenarios for simulations. In Proceedings of the Tenth IEEE International Symposium on Distributed Simulation and Real-Time Applications (DS-RT ’06), Terremolinos, Spain, 2–4 October 2006. [Google Scholar]
- Johansson, P.; Larsson, T.; Hedman, N.; Mielczarek, B.; Degermark, M. Scenario-based performance analysis of routing protocols for mobile ad-hoc networks. In Proceedings of the 5th Annual ACM/IEEE International Conference on Mobile Computing and Networking, Seattle, Washington, USA, 15–19 August 1999; pp. 195–206. [Google Scholar]
- International Maritime Organisation. (nd). AIS Transponders. Available online: http://www.imo.org/OurWork/Safety/Navigation/Pages/AIS.aspx (accessed on 28 April 2008).
- International Maritime Organisation. Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS), 2003. Available online: http://www.imo.org/OurWork/Safety/Navigation/Documents/227.pdf (accessed on 28 April 2008).
- NASA Marine Instruments. (nd). NASA Marine Instruments. Available online: http://www.nasamarine.com (accessed on 14 July 2016).
- COAA. (nd). Ship Plotter. Available online: http://www.coaa.co.uk/shipplotter.htm (accessed on 19 February 2013).
- McConnell. (nd). ShipAIS. Available online: http://www.shipais.com (accessed on 19 February 2013).
- Marine Traffic. (nd). Live Ship Maps-AIS. Available online: http://www.marinetraffic.com/ais/ (accessed on 12 March 2013).
- Maritime & Coastguard Agency. (n.d.). MCA-Home. Retrieved 02 19, 2013, from MCA, Home. Available online: http://www.dft.gov.uk/mca/ (accessed on 25 April 2018).
- Papadopoulos, G.Z.; Kritsis, K.; Gallais, A.; Chatzimisios, P.; Noel, T. Performance Evaluation Methods in Ad Hoc and Wireless Sensor Networks: A Literature Study. IEEE Commun. Mag. 2016, 54, 122–128. [Google Scholar] [CrossRef]
- nS3. (nd). nS-3. Available online: https://www.nsnam.org/ (accessed on 14 July 2016).
- Chaudhary, R.; Sethi, S.; Keshari, R.; Goel, S. A study of comparison of Network Simulator -3 and Network Simulator -2. Int. J. Comput. Sci. Inf. Technol. 2012, 3, 3085–3092. [Google Scholar]
- Hiranandani, D.; Obraczka, K.; Garcia-Luna-Aceves, J.J. MANET Protocol Simulations Considered Harmful: The Case For Benchmarking. IEEE Wirel. Commun. 2013, 20, 82–90. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key information for a node is as follows: <class> corps </class> <stringattribute> <name>name</name> <stringtimepoint> <time>2454102.0 15.0 G 2007 1 1 0 0 15</time> <value>$node_(10)</value> </stringtimepoint> </stringattribute> <position> <positiontimepoint> <time>2454102.0 15.0 G 2007 1 1 0 0 15</time> <x> 220.967796</x> <y> 109.528819</y> </positiontimepoint> This translates into a single line in the ns-2 movement file: $ ns_ at 015.000000 “$node_(10) setdest 12.053934 11.875736 0.176657” |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pullin, A.; Pattinson, C.; Kor, A.-L. Building Realistic Mobility Models for Mobile Ad Hoc Networks. Informatics 2018, 5, 22. https://doi.org/10.3390/informatics5020022
Pullin A, Pattinson C, Kor A-L. Building Realistic Mobility Models for Mobile Ad Hoc Networks. Informatics. 2018; 5(2):22. https://doi.org/10.3390/informatics5020022
Chicago/Turabian StylePullin, Adrian, Colin Pattinson, and Ah-Lian Kor. 2018. "Building Realistic Mobility Models for Mobile Ad Hoc Networks" Informatics 5, no. 2: 22. https://doi.org/10.3390/informatics5020022
APA StylePullin, A., Pattinson, C., & Kor, A.-L. (2018). Building Realistic Mobility Models for Mobile Ad Hoc Networks. Informatics, 5(2), 22. https://doi.org/10.3390/informatics5020022