Bus Operations Scheduling Subject to Resource Constraints Using Evolutionary Optimization


Abstract
:1. Introduction
2. Related Work
3. Modelling the Multi-Constrained Scheduling Problem
3.1. Passenger Excess Waiting Times
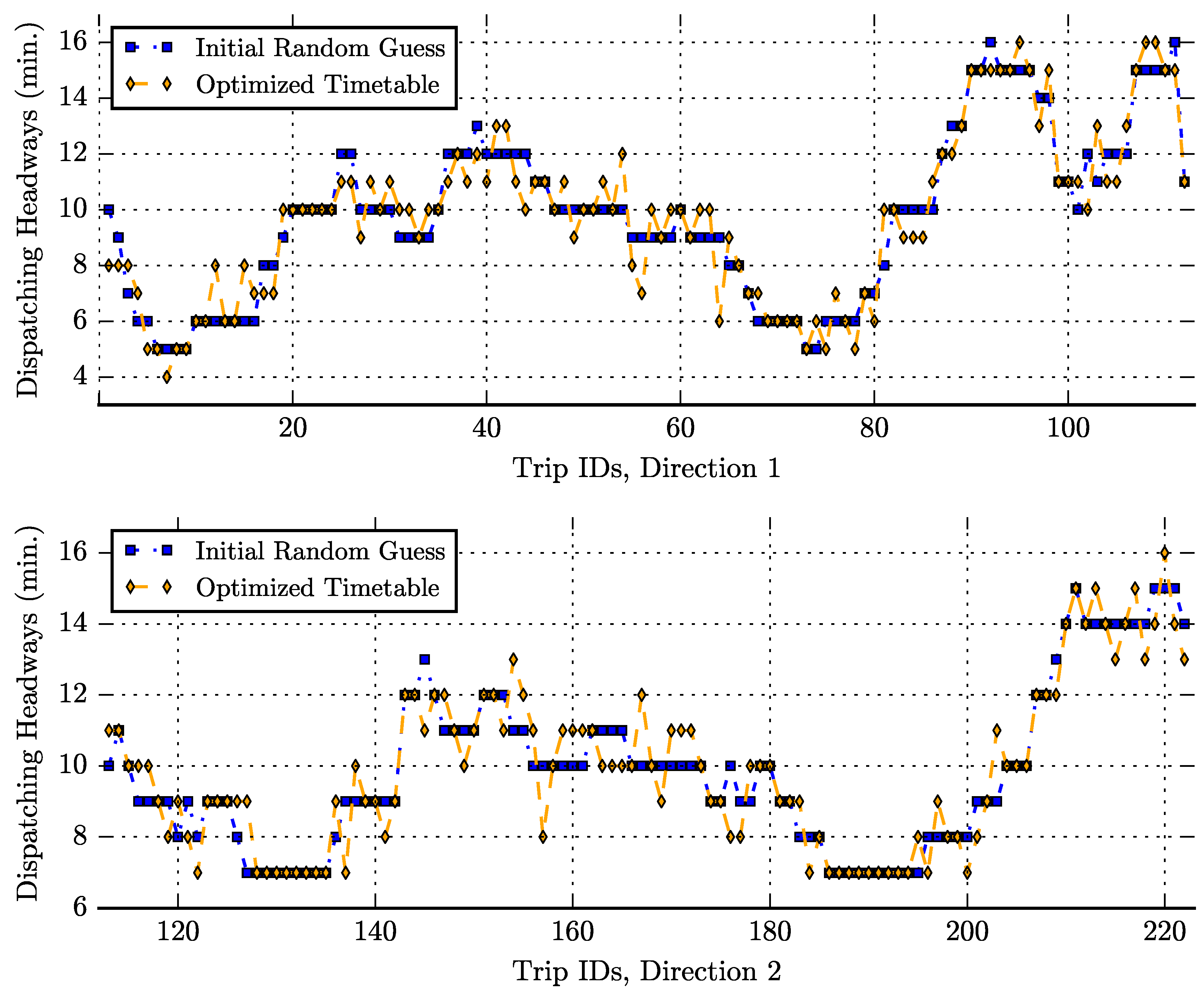
3.2. Dispatching Headway Range Constraint
3.3. Layover Time Constraint
3.4. Mealtime Constraint
3.5. Departure Time Constraint
3.6. Mathematical Program of the Timetabling Problem
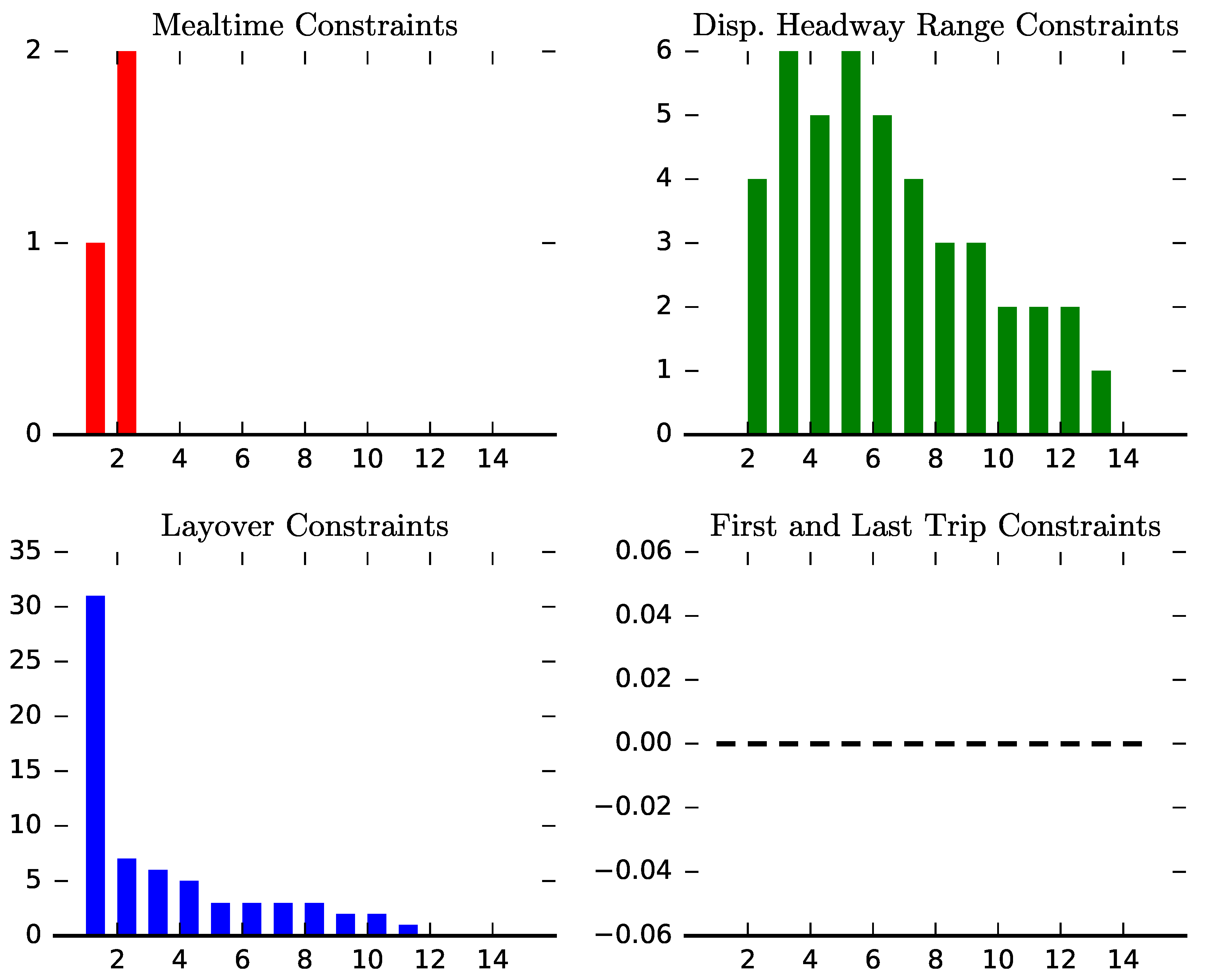
3.7. Exterior Point Penalties for Multi-Constrained Scheduling
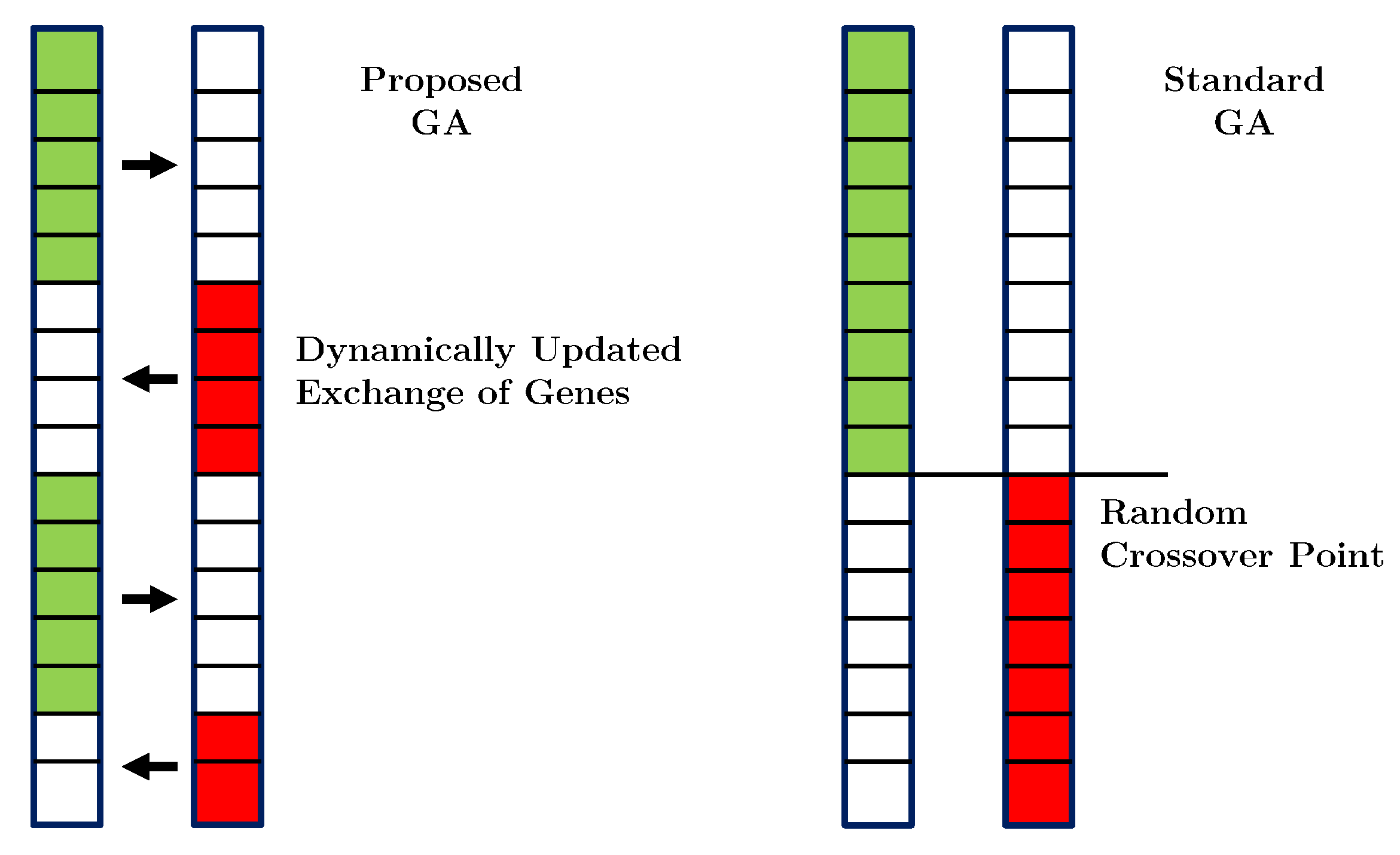
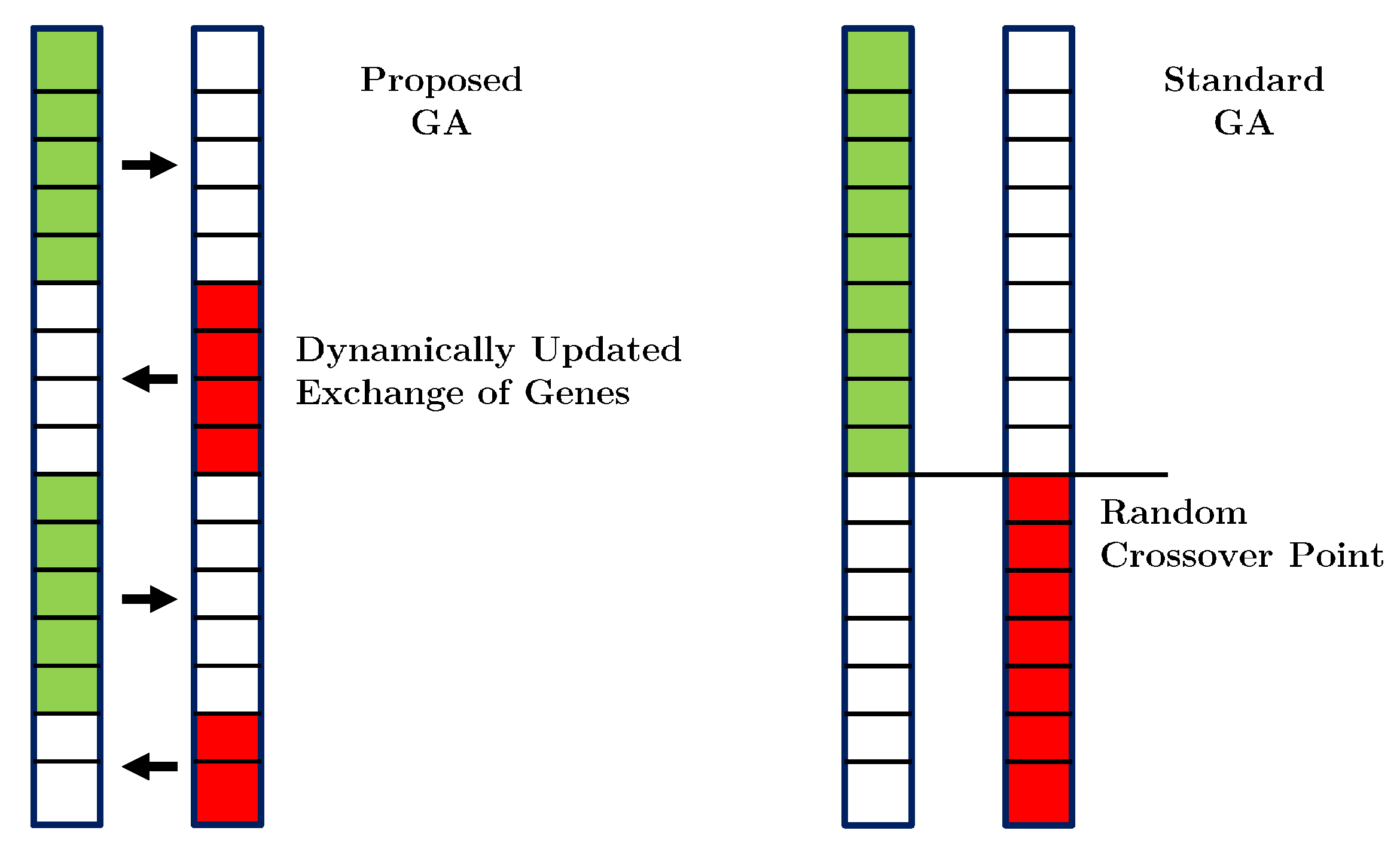
4. Solution Method-Evolutionary Optimization
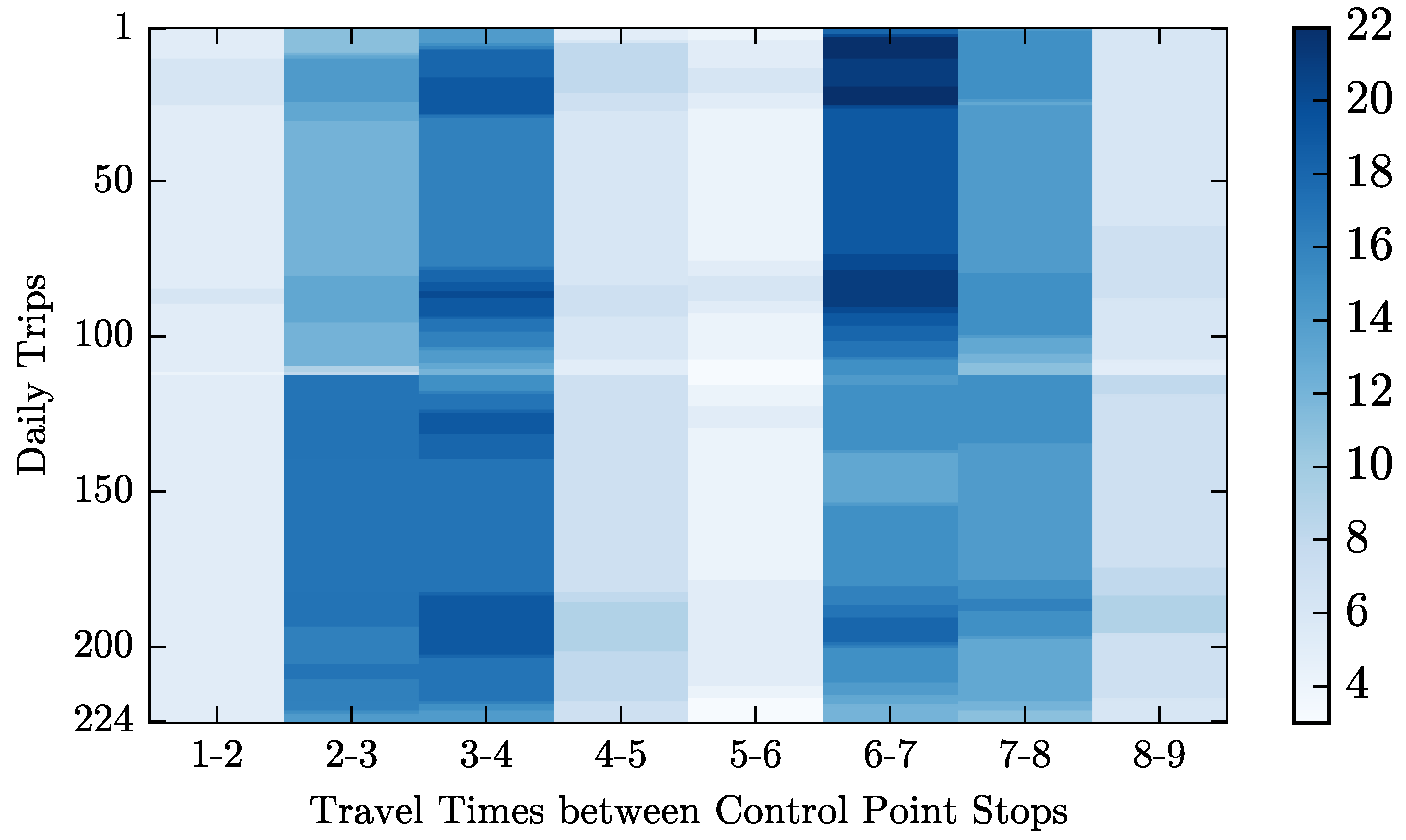
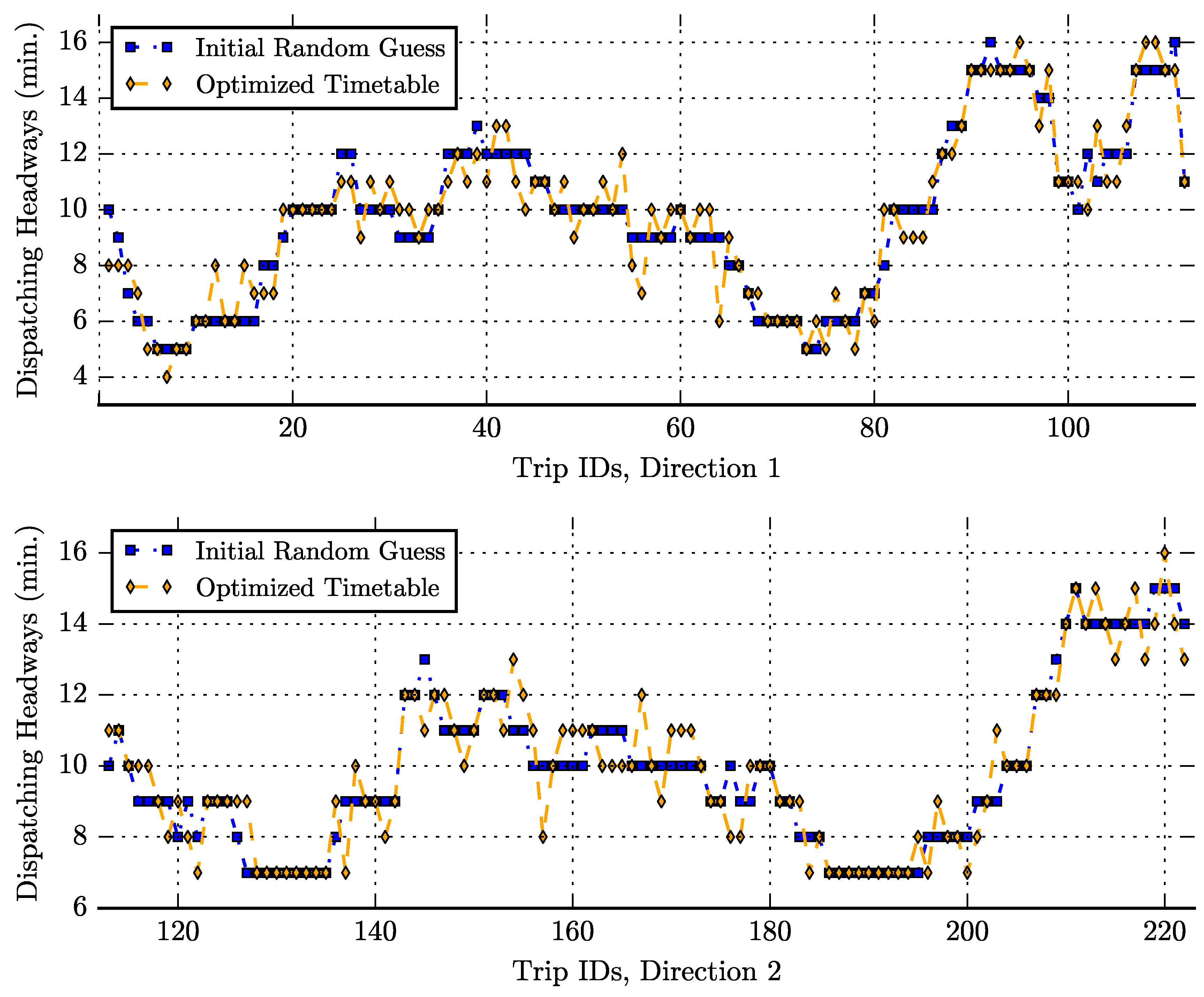
5. Case Study
Schedule Optimization of a Bi-Directional Bus Service
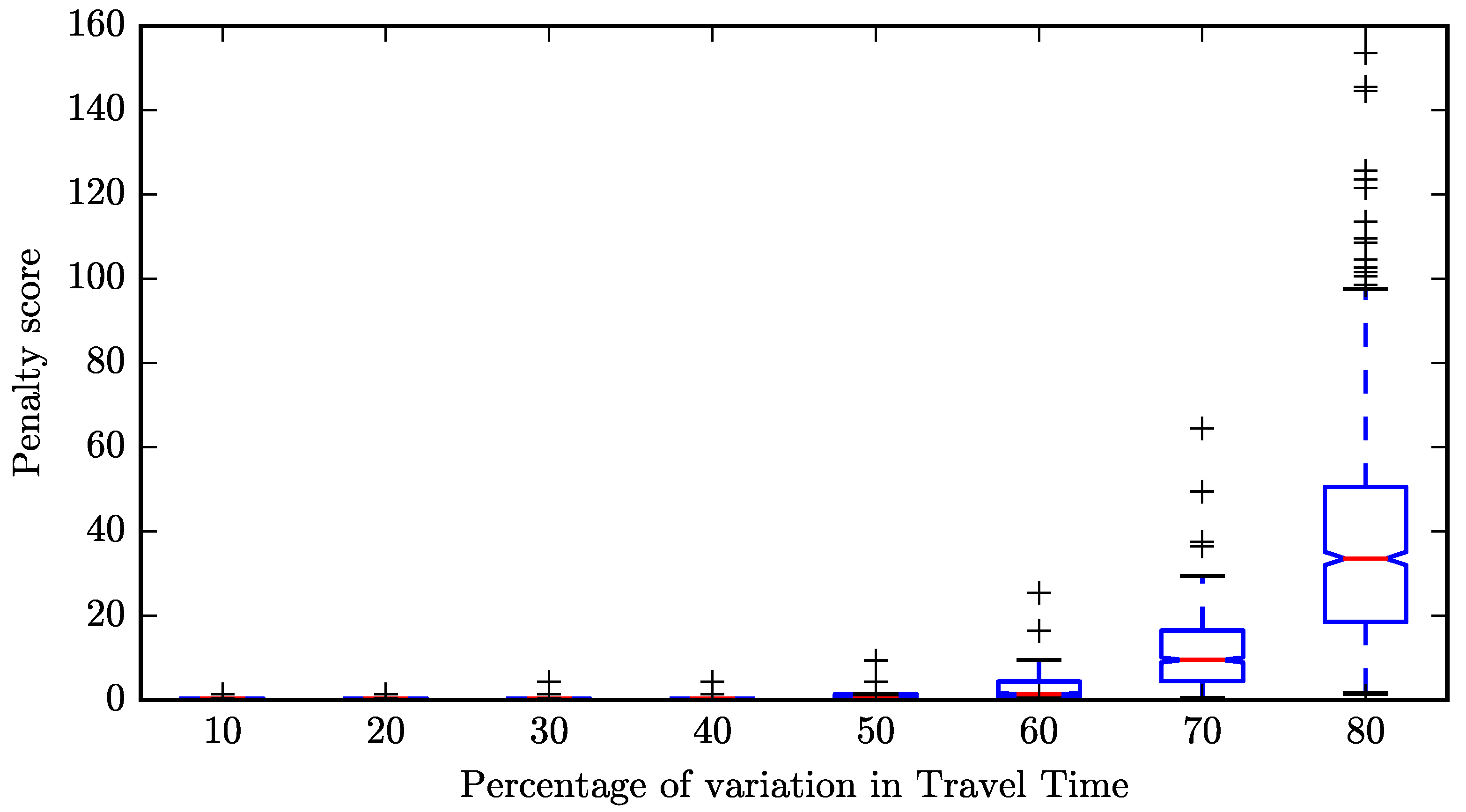
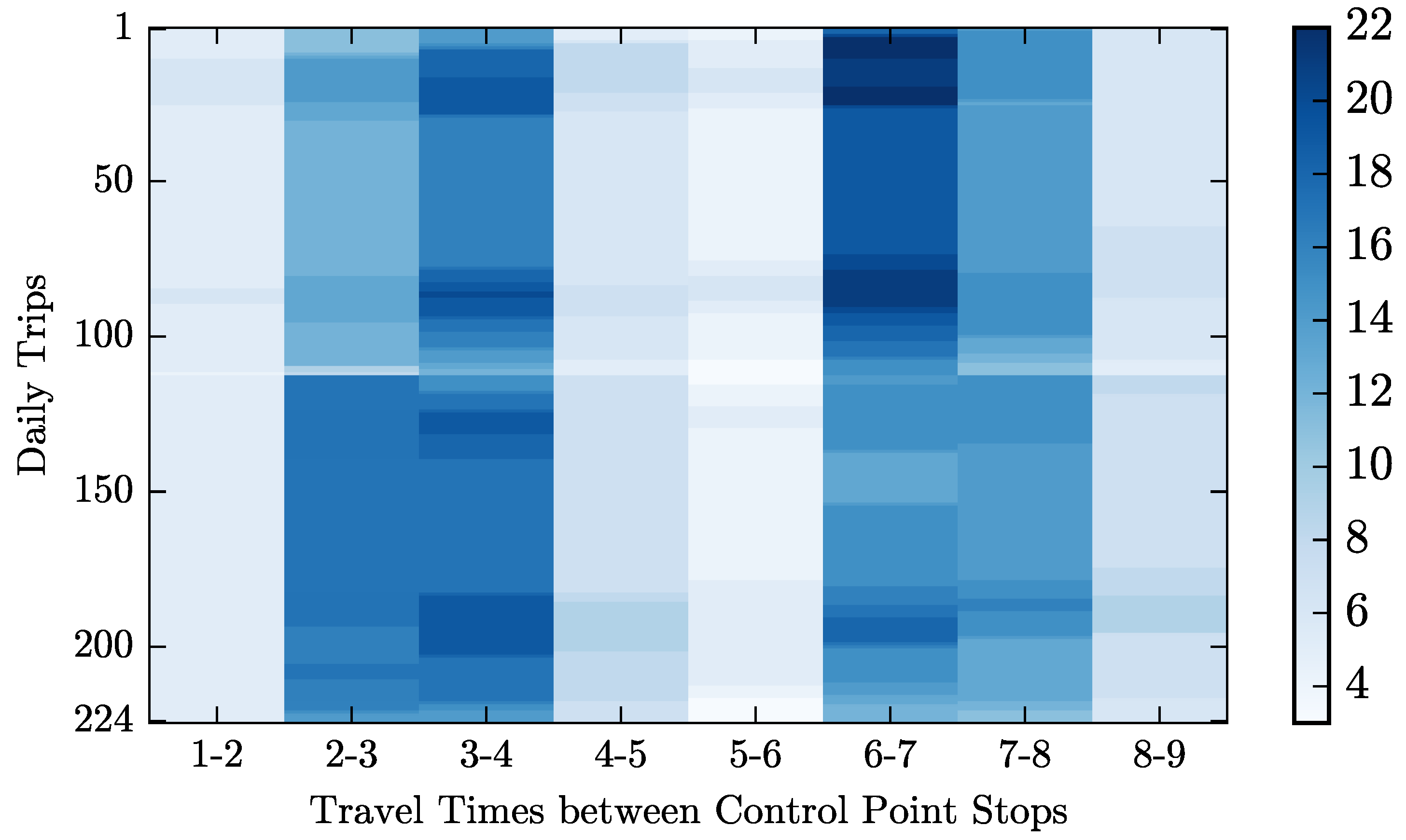
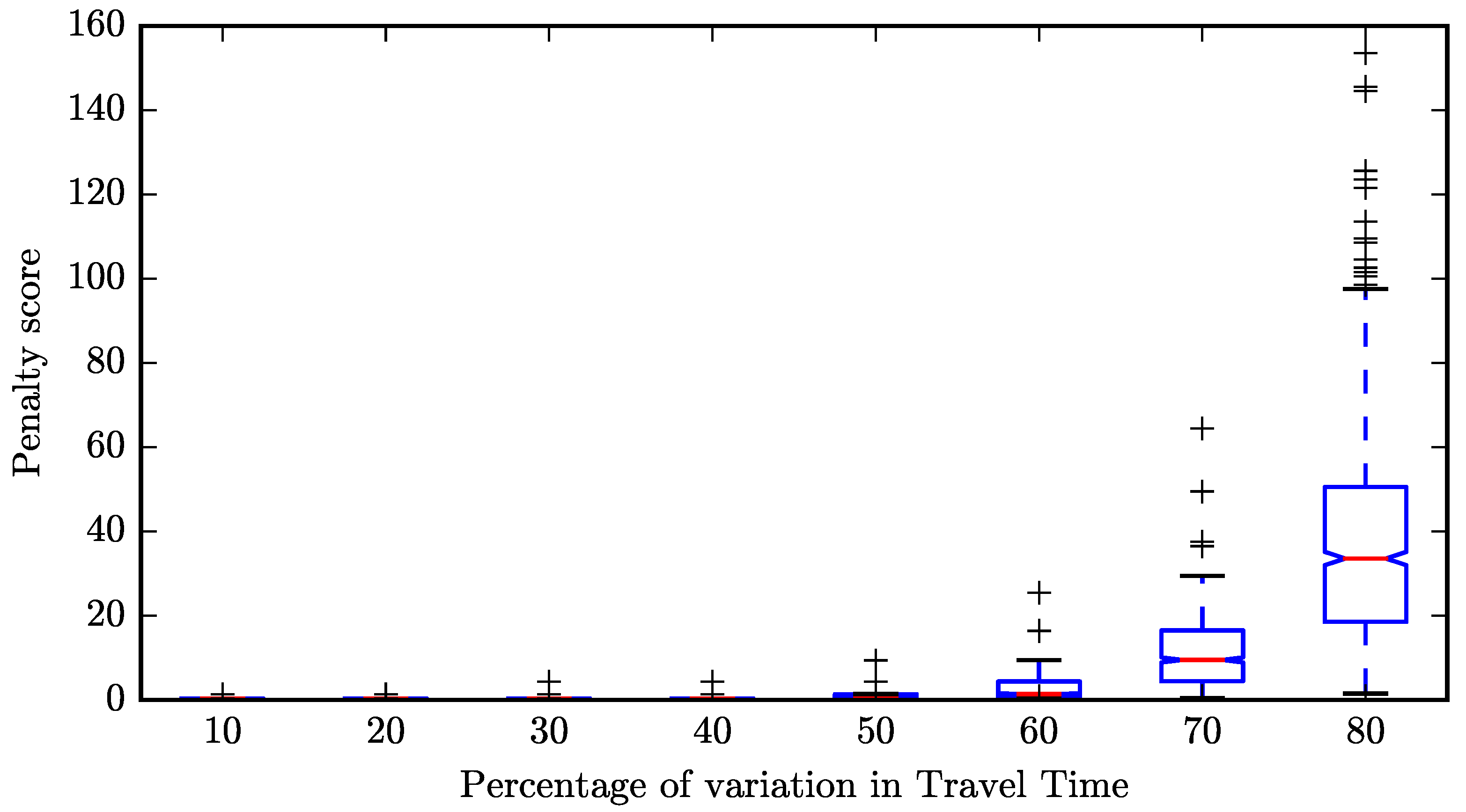
6. Studying the Travel Time Variation Effect in Real Operations Using Simulations
7. Results and Concluding Remarks
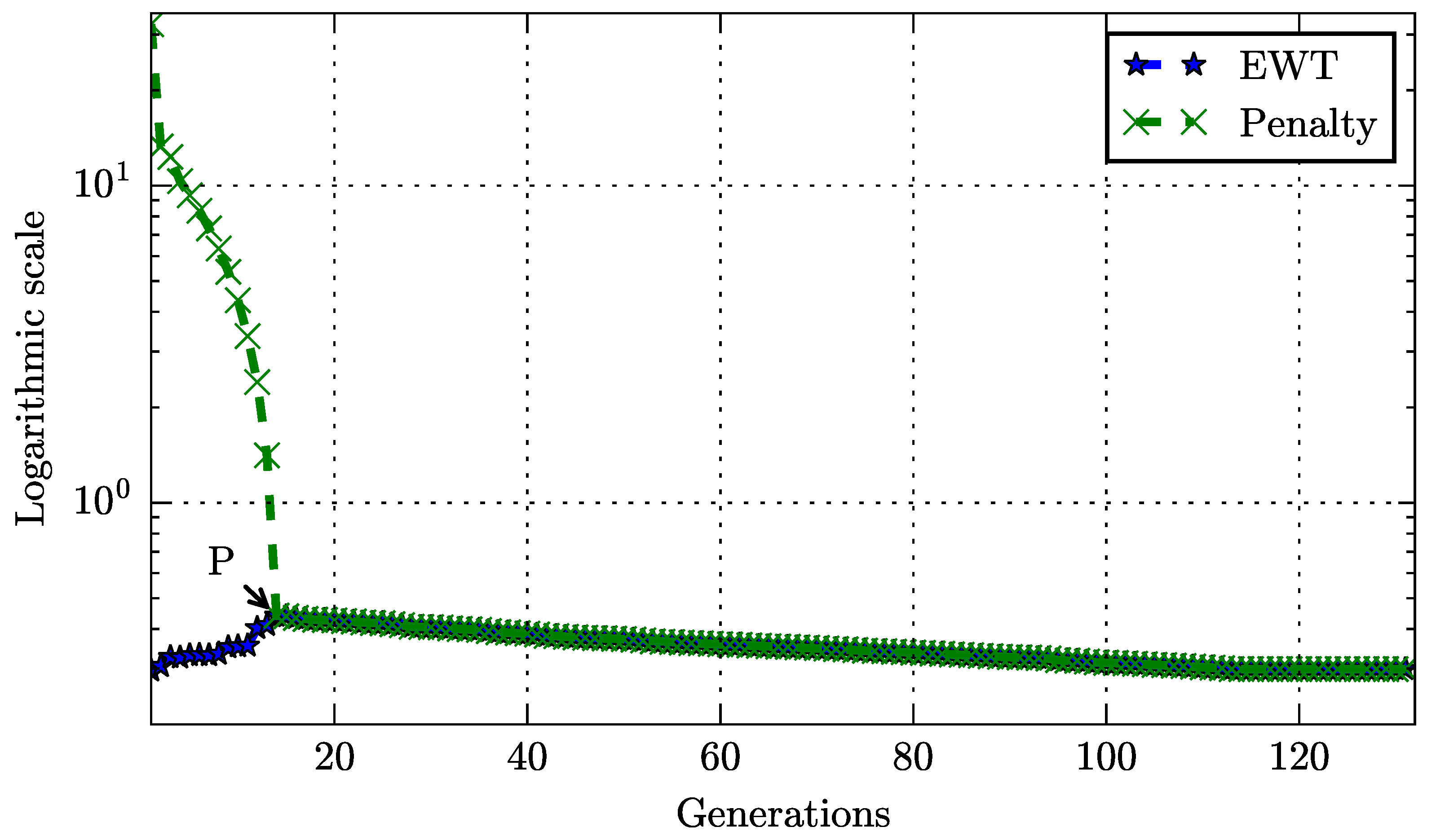
- All violated constraints were satisfied after a number of population evolutions;
- During the satisfaction of violated constraints, the EWTs of passengers were negatively impacted and were increased by 30%;
- After the satisfaction of constraints, the EWTs of passengers were improved leading to a 0.298-min service-wide EWT.
Author Contributions
Conflicts of Interest
Abbreviations
| AVL | Automated Vehicle Location |
| EA | Evolutionary Algorithm |
| EWT | Excess Waiting Time |
| GA | Genetic Algorithm |
| TMS | Transit Management Systems |
| TT | Travel Time |
References
- Gkiotsalitis, K.; Cats, O. Reliable frequency determination: Incorporating information on service uncertainty when setting dispatching headways. Transp. Res. Part C Emerg. Technol. 2018, 88, 187–207. [Google Scholar] [CrossRef]
- Chapman, R.; Michel, J. Modelling the tendency of buses to form pairs. Transp. Sci. 1978, 12, 165–175. [Google Scholar] [CrossRef]
- Pilachowski, J.M. An Approach to Reducing Bus Bunching; University of California: Berkeley, CA, USA, 2009. [Google Scholar]
- Gkiotsalitis, K.; Maslekar, N. Dynamic Bus Operations Optimization with REFLEX. NEC Tech. J. 2016, 11, 1. [Google Scholar]
- Johnson, R.M.; Reiley, D.H.; Muñoz, J.C. “The War for the Fare”: How Driver Compensation Affects Bus System Performance; Technical Report; National Bureau of Economic Research: Cambridge, MA, USA, 2005. [Google Scholar]
- Randall, E.R.; Condry, B.J.; Trompet, M.; Campus, S.K. International bus system benchmarking: Performance measurement development, challenges, and lessons learned. In Proceedings of the Transportation Research Board 86th Annual Meeting, Washington, DC, USA, 21–25 January 2007. [Google Scholar]
- Welding, P. The instability of a close-interval service. Oper. Res. Soc. 1957, 8, 133–142. [Google Scholar] [CrossRef]
- Eberlein, X.J. Real-time control strategies in transit operations: Models and analysis. Transp. Res. Part A 1997, 1, 69–70. [Google Scholar]
- Hickman, M.D. An analytic stochastic model for the transit vehicle holding problem. Transp. Sci. 2001, 35, 215–237. [Google Scholar] [CrossRef]
- Bartholdi, J.J.; Eisenstein, D.D. A self-coördinating bus route to resist bus bunching. Transp. Res. Part B Methodol. 2012, 46, 481–491. [Google Scholar] [CrossRef]
- Delgado, F.; Munoz, J.C.; Giesen, R. How much can holding and/or limiting boarding improve transit performance? Transp. Res. Part B Methodol. 2012, 46, 1202–1217. [Google Scholar] [CrossRef]
- O’Flaherty, C.; Mancan, D. Bus passenger waiting times in central areas. Traffic Eng. Control 1900, 11, 419–421. [Google Scholar]
- Barnett, A. On controlling randomness in transit operations. Transp. Sci. 1974, 8, 102–116. [Google Scholar] [CrossRef]
- Turnquist, M.A. A model for investigating the effects of service frequency and reliability on bus passenger waiting times. Transp. Res. Rec. 1978, 663, 70–73. [Google Scholar]
- Gkiotsalitis, K.; Maslekar, N. Improving Bus Service Reliability with Stochastic Optimization. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC), Las Palmas, Spain, 15–18 September 2015; pp. 2794–2799. [Google Scholar]
- Bates, J.; Polak, J.; Jones, P.; Cook, A. The valuation of reliability for personal travel. Transp. Res. Part E Logist. Transp. Rev. 2001, 37, 191–229. [Google Scholar] [CrossRef]
- Daganzo, C.F. A headway-based approach to eliminate bus bunching: Systematic analysis and comparisons. Transp. Res. Part B Methodol. 2009, 43, 913–921. [Google Scholar] [CrossRef]
- Friedman, M. A mathematical programming model for optimal scheduling of buses’ departures under deterministic conditions. Transp. Res. 1976, 10, 83–90. [Google Scholar] [CrossRef]
- Yan, S.; Chen, H.L. A scheduling model and a solution algorithm for inter-city bus carriers. Transp. Res. Part A Policy Pract. 2002, 36, 805–825. [Google Scholar] [CrossRef]
- Niu, H.; Tian, X. An approach to optimize the departure times of transit vehicles with strict capacity constraints. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Gkiotsalitis, K.; Cats, O. Exact Optimization of Bus Frequency Settings Considering Demand and Trip Time Variations. In Proceedings of the Transportation Research Board 96th Annual Meetings, No: 17-01871, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Ceder, A.A.; Hassold, S.; Dano, B. Approaching even-load and even-headway transit timetables using different bus sizes. Public Transp. 2013, 5, 193–217. [Google Scholar] [CrossRef]
- Sun, D.J.; Xu, Y.; Peng, Z.R. Timetable optimization for single bus line based on hybrid vehicle size model. J. Traffic Transp. Eng. 2015, 2, 179–186. [Google Scholar] [CrossRef]
- Chen, Q. Global optimization for bus line timetable setting problem. Discret. Dyn. Nat. Soc. 2014, 2014. [Google Scholar] [CrossRef]
- Gkiotsalitis, K.; Stathopoulos, A. Demand-responsive public transportation re-scheduling for adjusting to the joint leisure activity demand. Int. J. Transp. Sci. Technol. 2016, 5, 68–82. [Google Scholar] [CrossRef]
- Gkiotsalitis, K.; Stathopoulos, A. Joint leisure travel optimization with user-generated data via perceived utility maximization. Transp. Res. Part C Emerg. Technol. 2016, 68, 532–548. [Google Scholar] [CrossRef]
- Shi, R.J.; Mao, B.H.; Ding, Y.; Bai, Y.; Chen, Y. Timetable optimization of rail transit loop line with transfer coordination. Discret. Dyn. Nat. Soc. 2016, 2016. [Google Scholar] [CrossRef]
- Cattaruzza, D.; Absi, N.; Feillet, D.; González-Feliu, J. Vehicle routing problems for city logistics. EURO J. Transp. Logist. 2017, 6, 51–79. [Google Scholar] [CrossRef]
- Du, T.C.; Li, E.Y.; Chou, D. Dynamic vehicle routing for online B2C delivery. Omega 2005, 33, 33–45. [Google Scholar] [CrossRef]
- Dueker, K.J.; Kimpel, T.J.; Strathman, J.G.; Callas, S. Determinants of bus dwell time. J. Public Transp. 2004, 7, 2. [Google Scholar]
- TfL Transport for London: Bus Routes and Borough Reports. Available online: https://www.tfl.gov.uk/forms/14144.aspx (accessed on 1 December 2017).
- LTA Land Transport Authority: Bus Service Reliability Framework. Available online: http://www.lta.gov.sg/data/apps/news/press/2014/20140124BSRF(final2)-Annex.pdf (accessed on 1 December 2017).
- Van Oort, N. Incorporating service reliability in public transport design and performance requirements: International survey results and recommendations. Res. Transp. Econ. 2014, 48, 92–100. [Google Scholar] [CrossRef]
- De-rong, T.; Jing, W.; Han-bo, L.; Xing-wei, W. The optimization of bus scheduling based on genetic algorithm. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 1530–1533. [Google Scholar]
- Shrestha, A.; Mahmood, A. Improving Genetic Algorithm with Fine-Tuned Crossover and Scaled Architecture. J. Math. 2016, 2016. [Google Scholar] [CrossRef]
- Tsai, C.W.; Tseng, S.P.; Chiang, M.C.; Yang, C.S.; Hong, T.P. A high-performance genetic algorithm: Using traveling salesman problem as a case. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef] [PubMed]
- Dorbritz, R.; Lüthi, M.; Weidmann, U.; Nash, A. Effects of onboard ticket sales on public transport reliability. In Transportation Research Record: Journal of the Transportation Research Board; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2009; pp. 112–119. [Google Scholar]
- Hollander, Y.; Liu, R. Estimation of the distribution of travel times by repeated simulation. Transp. Res. Part C Emerg. Technol. 2008, 16, 212–231. [Google Scholar] [CrossRef]
- TfL Bus Routes & Borough Reports. Available online: https://tfl.gov.uk/forms/14144.aspx?borough=Barking+ (accessed on 1 December 2017).
- Lopez-Garcia, P.; Onieva, E.; Osaba, E.; Masegosa, A.D.; Perallos, A. A hybrid method for short-term traffic congestion forecasting using genetic algorithms and cross entropy. IEEE Trans. Intell. Transp. Syst. 2016, 17, 557–569. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Description |
|---|---|
| D | Scheduled arrival time of each trip at each stop |
| N | Set of trips in the selected line for a day |
| S | Set of stops in the selected line |
| Upper limit of dispatching headways between consecutive trips | |
| Lower limit of dispatching headways between consecutive trips | |
| l | Allowed layover/Break time for each trip |
| m | Allowed mealtime break for every bus driver |
| start time of the first trip of the day | |
| start time of the last trip of the day | |
| k | typical dwell time at stops |
| estimated travel time of trip i between stops j and |
| Time Period (min.) | Direction 1 | Direction 2 |
|---|---|---|
| 390–510 | 6–10 min | 7–11 min |
| 510–1020 | 5–13 min | 7–13 min |
| 1020–1140 | 8–15 min | 7–9 min |
| 1140–1380 | 10–16 min | 9–15 min |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gkiotsalitis, K.; Kumar, R. Bus Operations Scheduling Subject to Resource Constraints Using Evolutionary Optimization. Informatics 2018, 5, 9. https://doi.org/10.3390/informatics5010009
Gkiotsalitis K, Kumar R. Bus Operations Scheduling Subject to Resource Constraints Using Evolutionary Optimization. Informatics. 2018; 5(1):9. https://doi.org/10.3390/informatics5010009
Chicago/Turabian StyleGkiotsalitis, Konstantinos, and Rahul Kumar. 2018. "Bus Operations Scheduling Subject to Resource Constraints Using Evolutionary Optimization" Informatics 5, no. 1: 9. https://doi.org/10.3390/informatics5010009
APA StyleGkiotsalitis, K., & Kumar, R. (2018). Bus Operations Scheduling Subject to Resource Constraints Using Evolutionary Optimization. Informatics, 5(1), 9. https://doi.org/10.3390/informatics5010009