
Towards Moving Objects Behavior Analysis: Region Speed Limit Rate Measure



Abstract
1. Introduction
- -
- Sketch-planning tools: these tools produce general estimates of travel demand and traffic operations in response to transportation improvements.
- -
- Travel demand models: these are mathematical models that forecast long-term future travel demand based on current conditions and major highway improvements in metropolitan areas.
- -
- Analytical/deterministic tools: these tools predict capacity, density, speed, delay, and queuing at a variety of transportation facilities.
- -
- Traffic signal optimization tools: these tools are designed to develop optimal signal phasing and timing plans for isolated signal intersections, arterial streets, or signal networks.
- -
- Macroscopic simulation models: these models are based on the relationships between the flow, speed, and density of the traffic. The simulation takes place on a section-by-section basis rather than by tracking individual vehicles.
- -
- Microscopic simulation models: these models simulate the movement of individual vehicles. These models evaluate heavily congested conditions, complex geometric configurations, and system-level impacts of future transportation improvements. However, these models are time consuming, costly, and can be difficult to calibrate.
2. Definitions and Methods
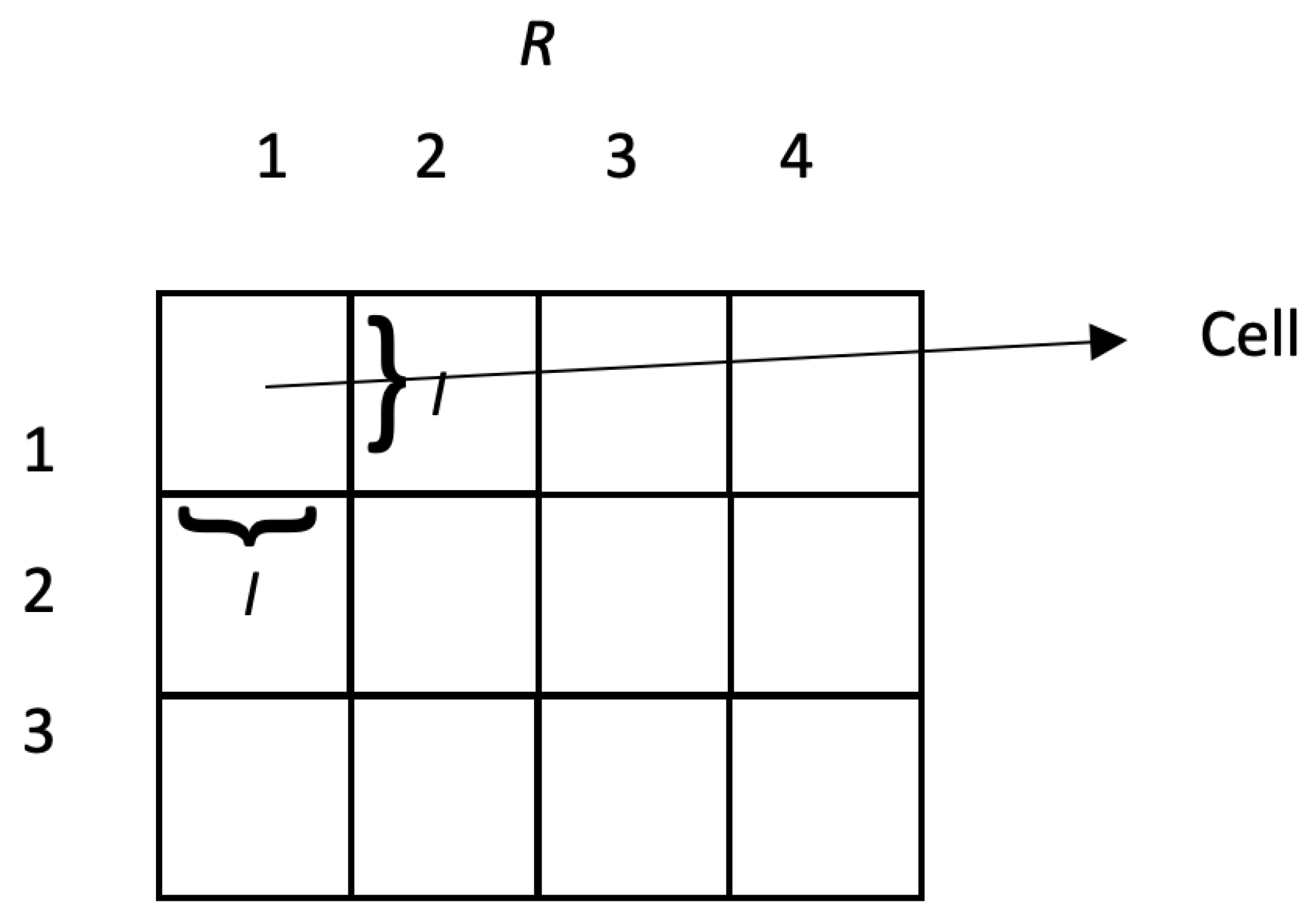
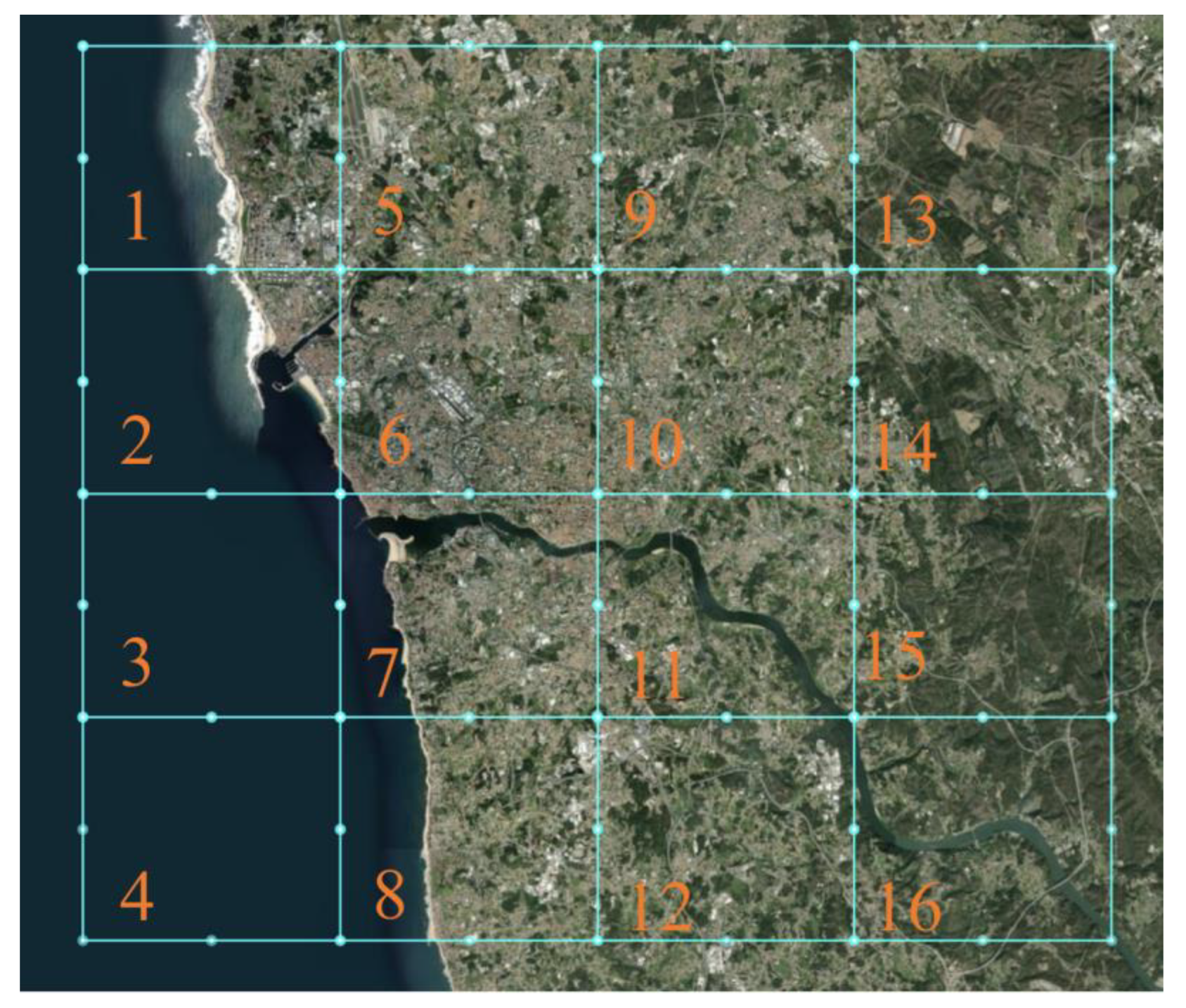
- A spatiotemporal scenario STS(R, TempSeg) where R is a region of order p × q.
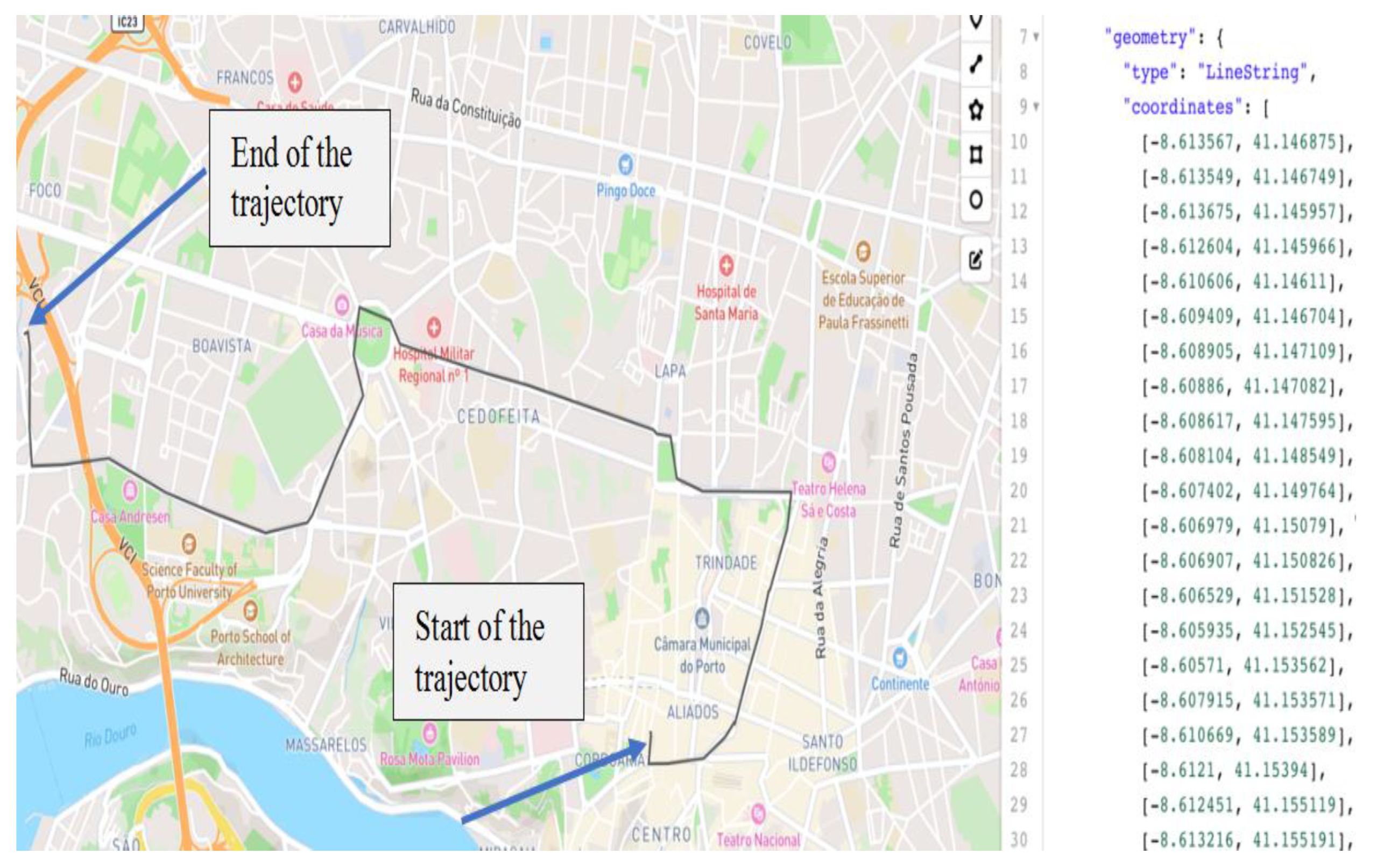
- A trajectory T = < (x1, y1, t1), (x2, y2, t2), …, (xn, yn, tn)>.
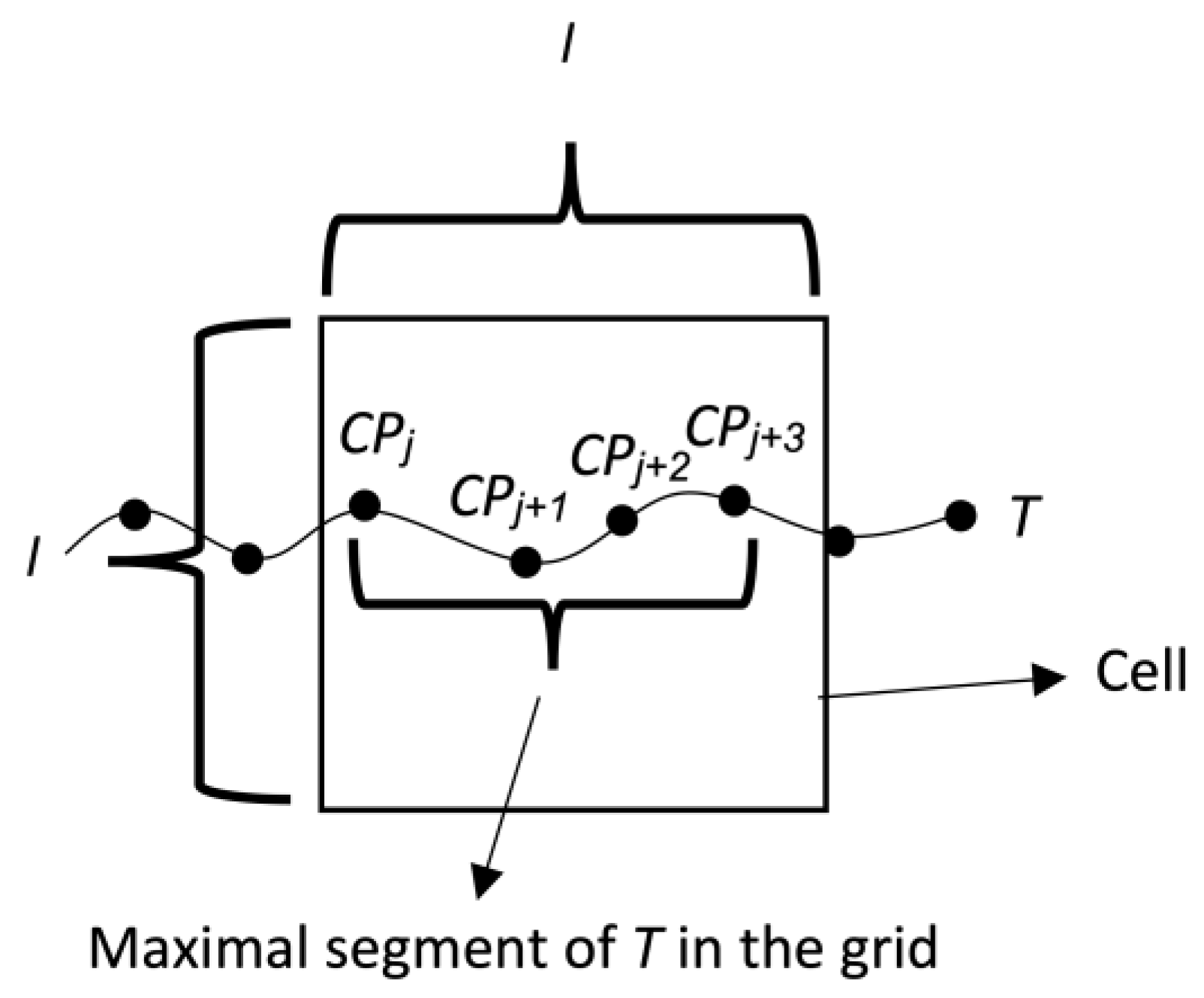
- A subtrajectory Subt of T, Subt = < (xj, yj, tj), (xj+1, yj+1, tj+1), …, (xj+m, yj+m, tj+m)>, 0 < j < n, m ∈ I+, (j + m) ≤ n, i.e., |Subt| > 1 (i.e., Subt has at least two CPs). That is, a subtrajectory is a subsequence of at least two CPs of a trajectory.
- (a)
- ∀ CP (xk, yk, tk) ∈ Subt, k ∈ I+, j ≤ k ≤ (j+m), (xk, yk) is inside R[v, w], i.e., the cell R[v, w] contains the CP (xk, yk, tk) (spatial inclusion [21]).
- (b)
- ∀ CP (xk, yk, tk) ∈ Subt, k ∈ I+, j ≤ k ≤ (j+m), tk ∈ TempSeg, i.e., the segment TempSeg includes the CP (xk, yk, tk) (temporal inclusion [22]).
- (c)
- The first CP of Subt, i.e., (xj, yj, tj), is the first CP of T (i.e., j = 1), or if j > 1 then, (xj-1, yj-1) is not inside R[v, w] or tj-1 ∉ TempSeg.
- (d)
- The last CP, i.e., (xj+m, yj+m, tj+m), of Subt is the last CP of T (i.e., j + m = n), or if j+m < n then: (xj+m+1, y j+m+1) is not inside R[v, w] or tj+m+1 ∉ TempSeg.
- (e)
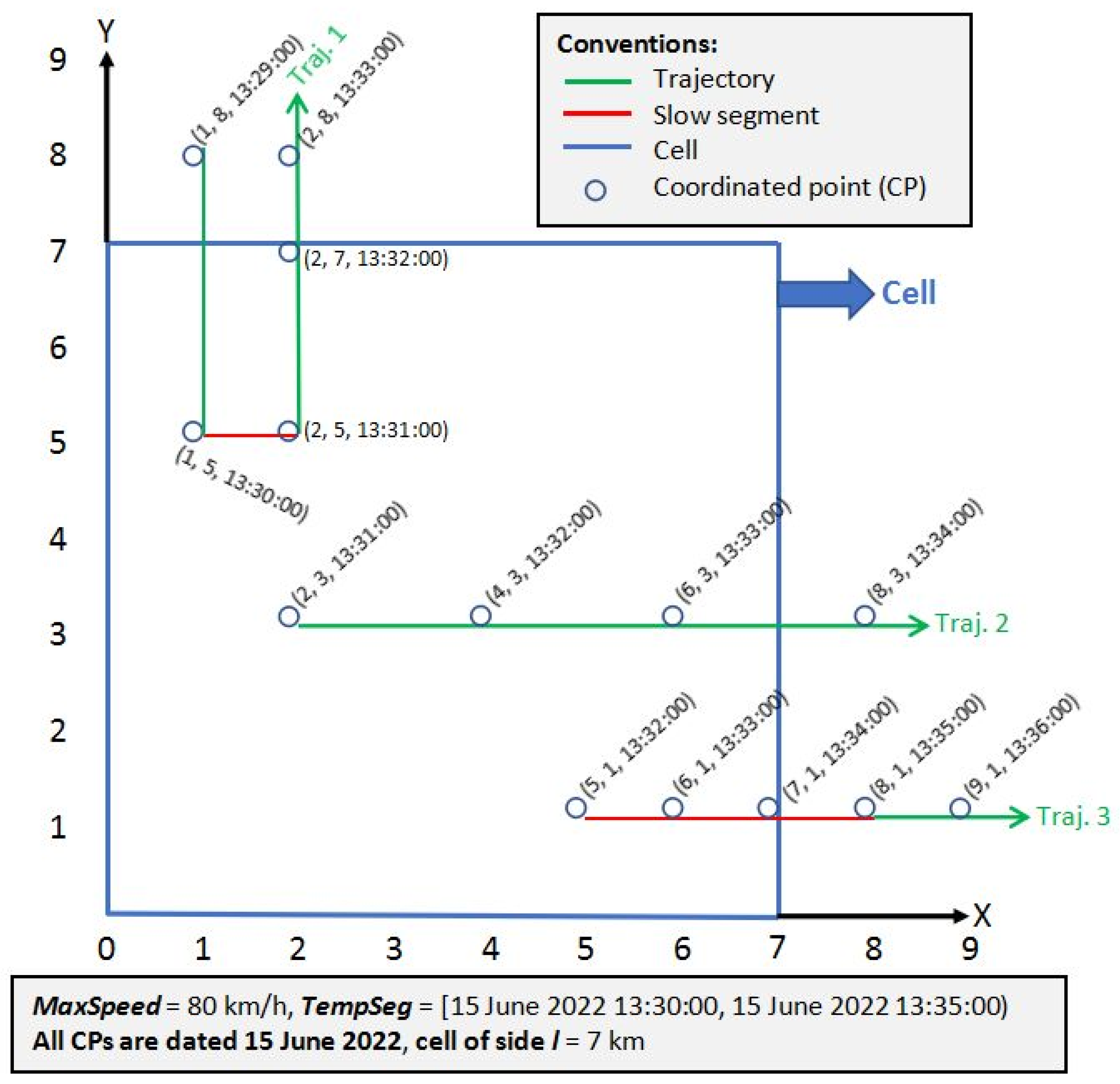
- Let MaxSpeed be a speed limit set by the analyst, where MaxSpeed ∈ R+, then ∀ (xk, yk, tk) and (xk+1, yk+1, tk+1), k ∈ I+, j ≤ k < (j + m), i.e., for every pair of consecutive CPs in Subt, their speed (calculated as the distance of the straight line between (xk, yk) and (xk+1, yk+1) divided by (tk+1- tk)) is less than or equal to MaxSpeed.
- (f)
- The first CP of Subt, i.e., (xj, yj, tj), is the first CP of T (i.e., j = 1), or if j > 1 then, the speed between (xj-1, yj-1, tj-1) and (xj, yj, tj) is greater than MaxSpeed, or (xj-1, yj-1) is not inside R[v, w], or tk ∉ TempSeg.
- (g)
- The last CP of Subt, i.e., (xj+m, yj+m, tj+m), is the last CP of T(i.e., j+m = n), or if j+m < n then, the speed between (xj+m, yj+m, tj+m) and (xj+m+1, yj+m+1, tj+m+1) is greater than MaxSpeed, or (xj+m+1, yj+m+1) is not inside R[v, w] or tj+m+1 ∉ TempSeg.
| CellSpeedLimitRate(TT, r, MaxSpeed, TempSeg) Input: TT //Array of trajectories r //Cell of a spatiotemporal scenario where the speed limit rate will be computed MaxSpeed //Speed limit TempSeg //Temporal segment of the spatiotemporal scenario where the cell r is located Output: speedLimitRate //Speed limit rate of r DECLARE speedLimitRate = 0; maximalSlowSegmentsDistance = 0; //Total distance of all the maximal slow segments maximalSegmentsDistance = 0; //Total distance of all the maximal segments euclideanDist; //Euclidean distance between two CPs BEGIN 1. FOR EACH trajectory T ∈ TT 2. //Traverse trajectory T 3. FOR i = 1 TO size(T)-1; //size(T) function returns the number of CPs of T 4. //Check spatial and temporal inclusion of T[i] and T[i+1] in r 5. IF (inside((T[i].x, T[i].y), r) AND T[i].t ∈ TempSeg AND 6. inside((T[i+1].x, T[i+1].y), r) AND T[i+1].t ∈ TempSeg) THEN 7. //Euclidean distance between T[i] and T[i+1] 8. euclideanDist = euclideandistance((T[i].x, T[i].y), (T[i+1].x, T[i+1].y)) 9. maximalSegmentsDistance += euclideanDist; 10. //Checks the speed condition 11. IF (speed(T[i], T[i+1]) ≤ MaxSpeed) THEN 12. maximalSlowSegmentsDistance += euclideanDist; 13. END IF 14. END IF 15. END FOR 16. END FOR EACH 17. IF (maximalSegmentsDistance > 0) THEN 18. //Compute speed limit rate of r 19. speedLimitRate = maximalSlowSegmentsDistance / maximalSegmentsDistance; 20. END IF; 21. RETURN speedLimitRate; END CellSpeedLimitRate |
- x ≥ rx and x ≤ rx + l
- y ≥ ry and y ≤ ry + l
3. Results and Discussion
- TRIP_ID: trip identifier.
- TAXI_ID: taxi id.
- TIMESTAMP: time when the trip began.
- POLYLINE: list of coordinates [longitude, latitude]. A pair of consecutive coordinates corresponds to 15 s of a trip. The last coordinate corresponds to the trip’s destination, while the first one represents its start.
- MISSING_DATA: type of the data packet. MISSING_DATA may take two values:
- ○
- FALSE: if there are no missing coordinates.
- ○
- TRUE: otherwise.
- First: considering the 12 spatiotemporal scenarios and the 14 cells (excluding cells 3 and 4), we ran our algorithm for all the 28 days with MaxSpeed 50 km/h and 40 km/h.
- Second: from the results of the first experiment, we chose five cells: four of them were the cells with more trajectories, and the other was the one with less trajectories. Then, we ran our algorithm with MaxSpeed values of 50 km/h, 30 km/h, and 10 km/h. For each of these five cells, we obtained the results for 28 days.
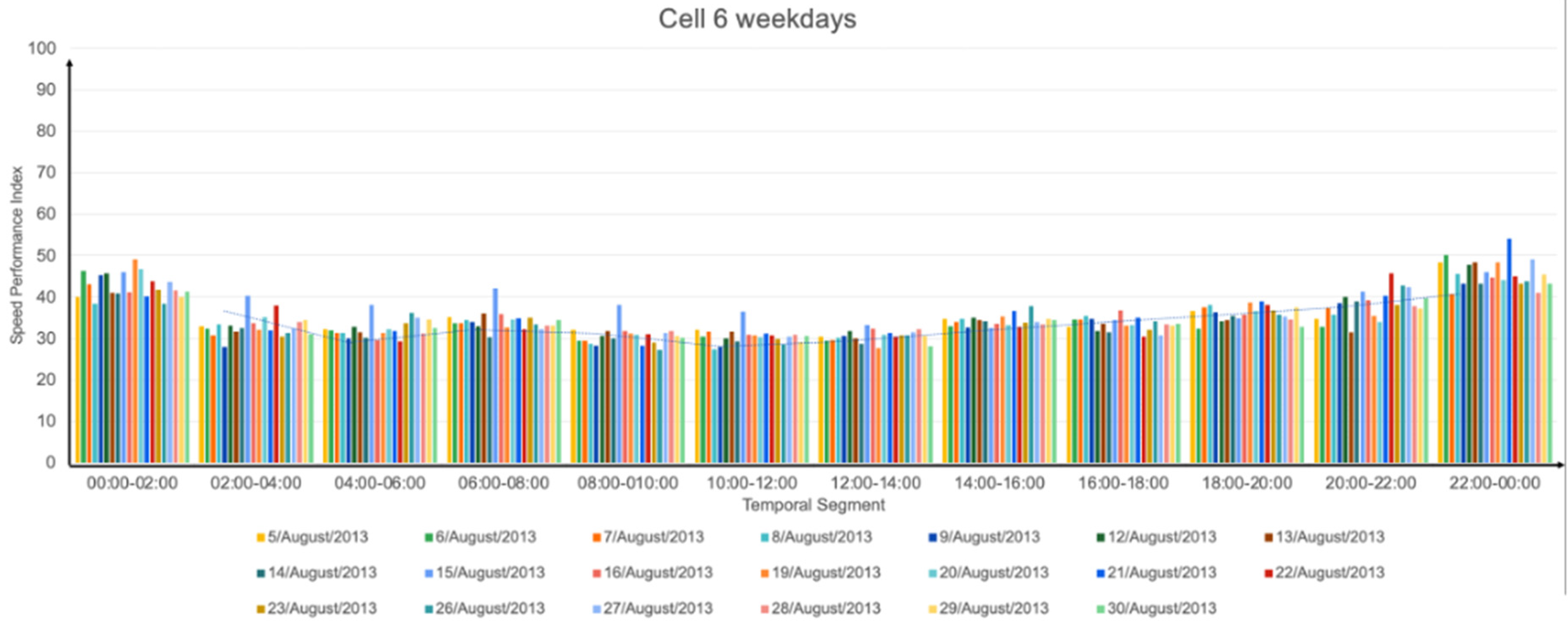
- Third: considering the same five cells as the second experiment, we conducted the corresponding experiments for the SPI with Vmax of 100 km/h, 80 km/h, and 60 km/h.
- Fourth: analysis of slow segments.
3.1. First Experiment with MaxSpeed 50 km/h and 40 km/h
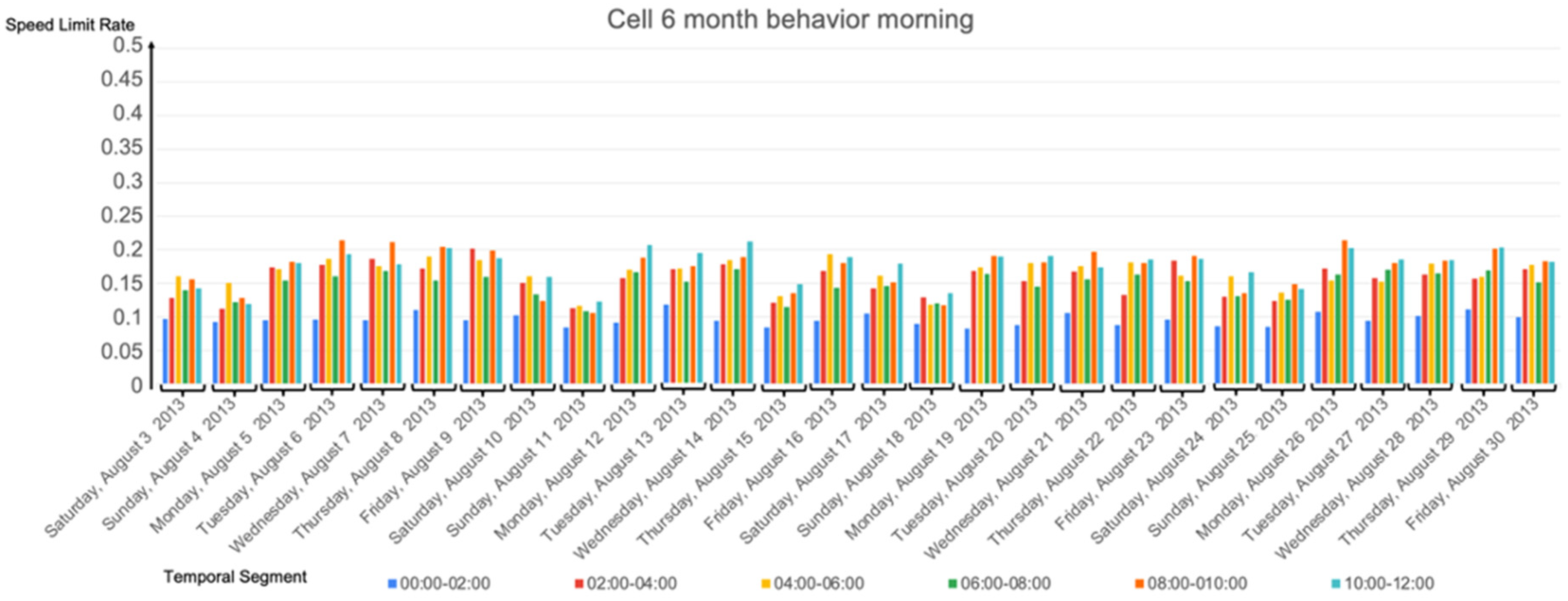
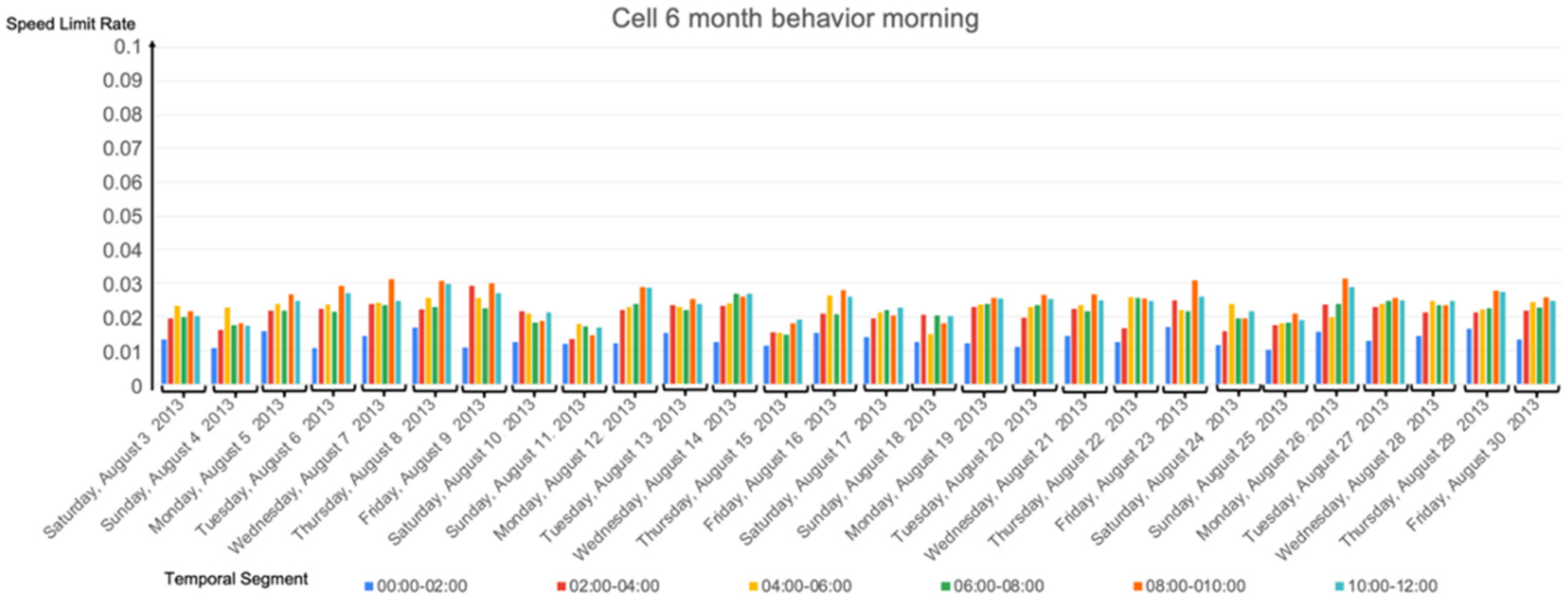
3.2. Second Experiment
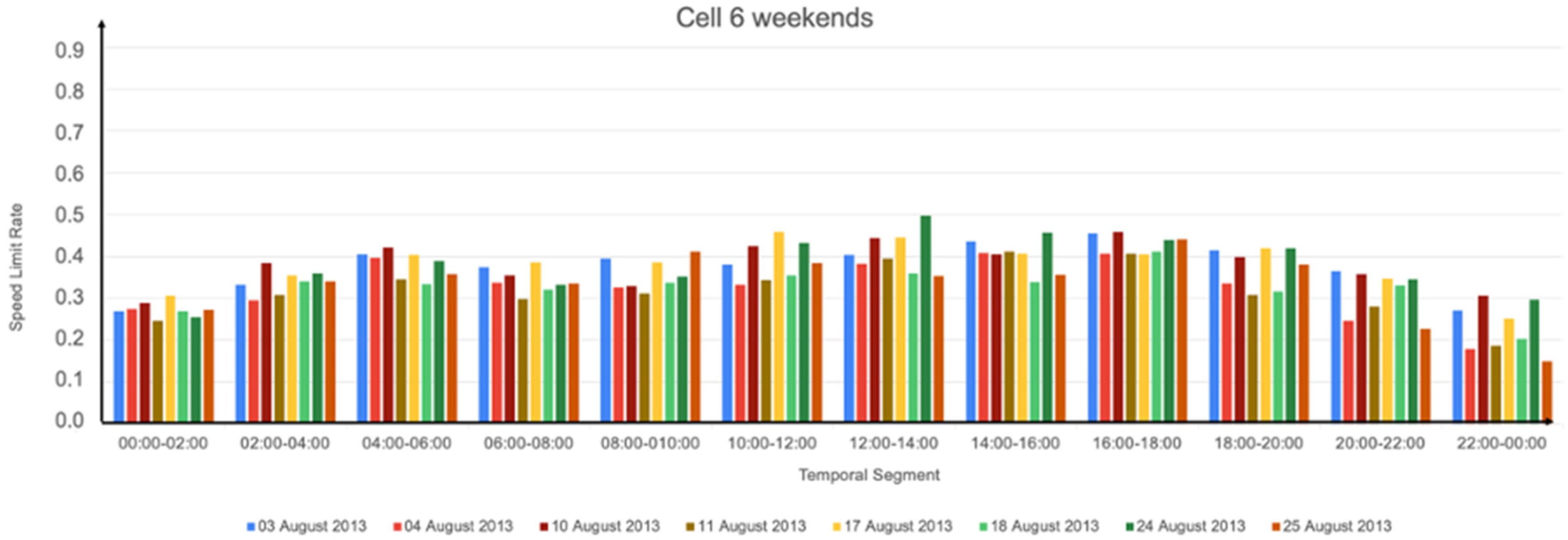
- Weekdays were slower than weekends, especially slower than Sundays in the mornings.
- Sundays were the slowest days.
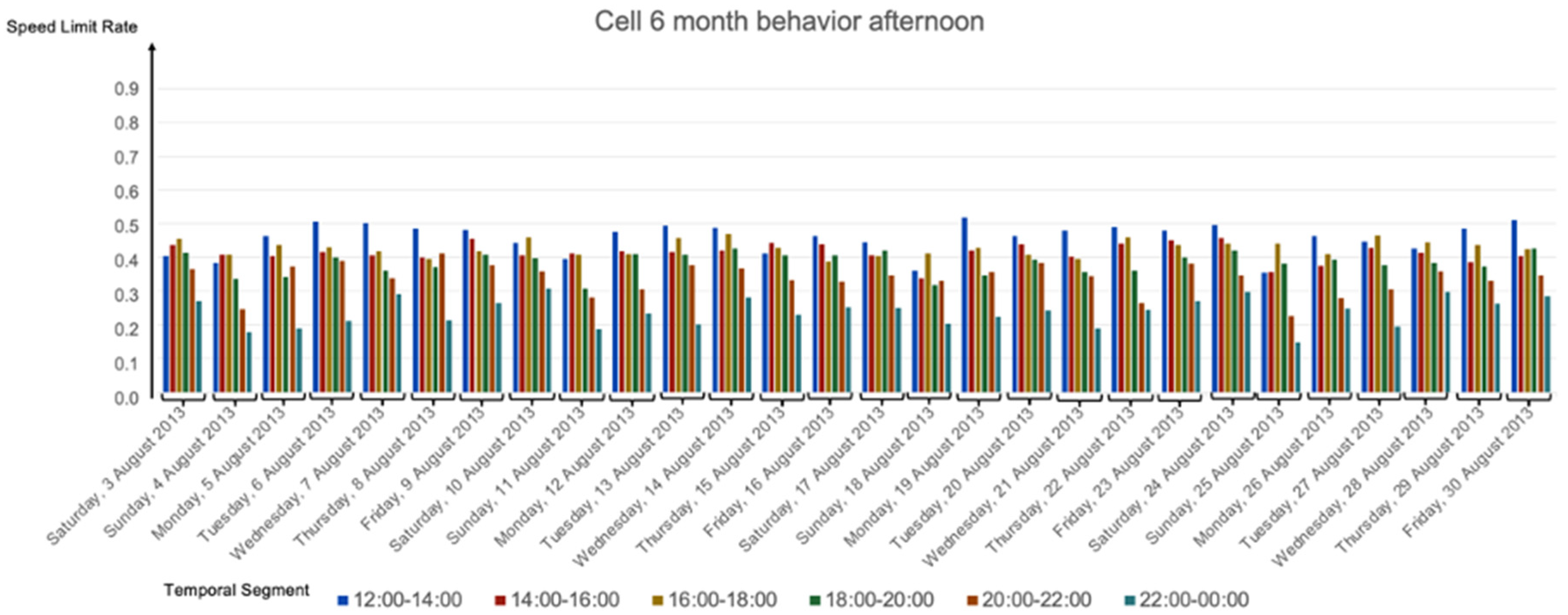
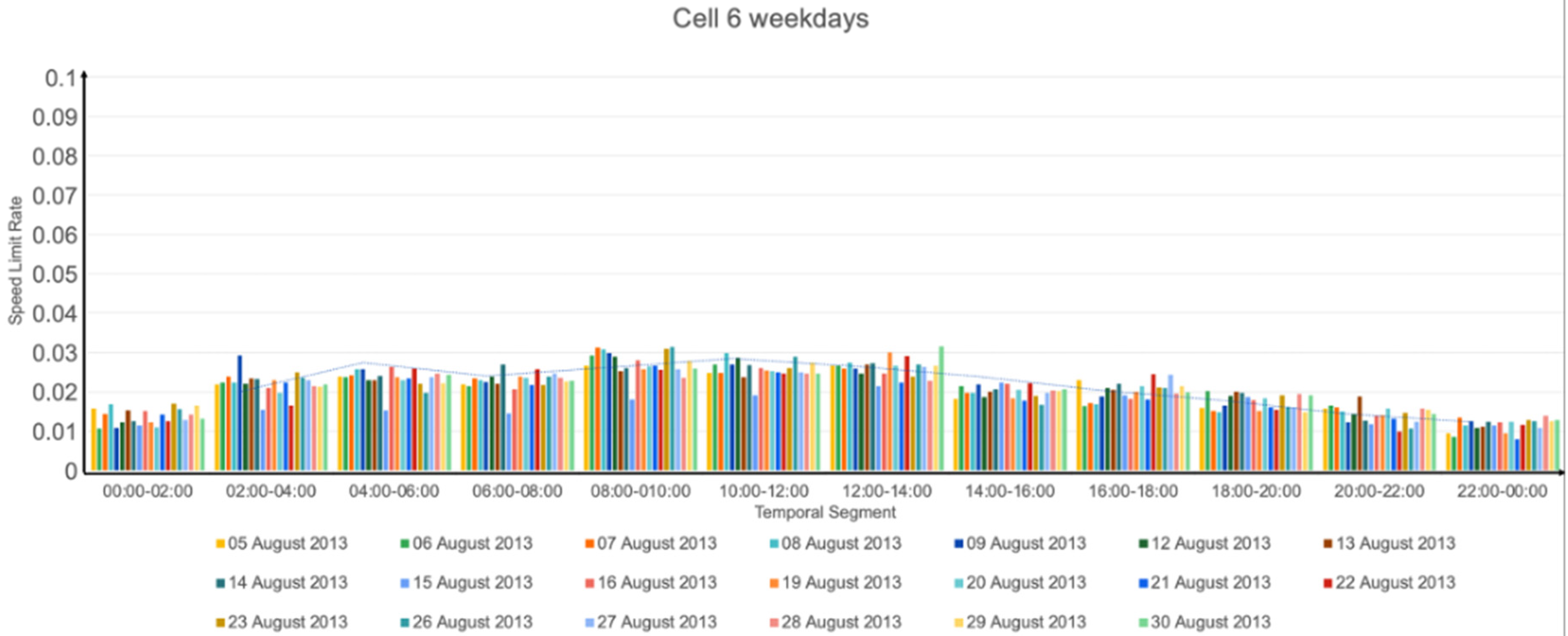
- Mornings and middays (08:00 to 14:00] were slower than the afternoons (14:00 to 20:00] (although, in some cells, e.g., cell 6, the slowness was similar in both time-ranges). This makes sense since in the mornings most people commute to work and school and have lunch at noon. On the other hand, in the afternoons, not all of these people return to their morning activities. Those who do, return home at different times, e.g., in schools, classes usually start at 9:00 and end at 15:30, banks work from 8:30 to 15:00, small stores are open from 9:00 to 18:00, and big stores from 10:00 to 22:00.
- The temporal segment (08:00, 10:00] was the slowest.
- The temporal segments (22:00, 00:00] and (00:00, 02:00] were the fastest.
- There was more slowness between 08:00 and 18:00 than between 18:00 and 08:00.
- In addition:
- As MaxSpeed increases, so does the speed limit rate measure in the cells; this is reasonable because as the speed limit increases, more slow segments are generated, and thus, the speed limit rate measure increases as well. Note that, if MaxSpeed → ∞ then speed limit rate = 1, because all the segments that pass through a cell are considered slow.
- Considering the five cells of experiment 2, cell 7 was the slowest.
- (00:00, 02:00], (02:00, 04:00], (20:00, 22:00], and (22:00, 00:00] were the fastest temporal segments. This is reasonable because at these hours, fewer vehicles are circulating.
- In general, the weekdays had similar behavior, although Mondays tended to be slower than the other weekdays and Tuesdays tended to be faster.
3.3. Third Experiment
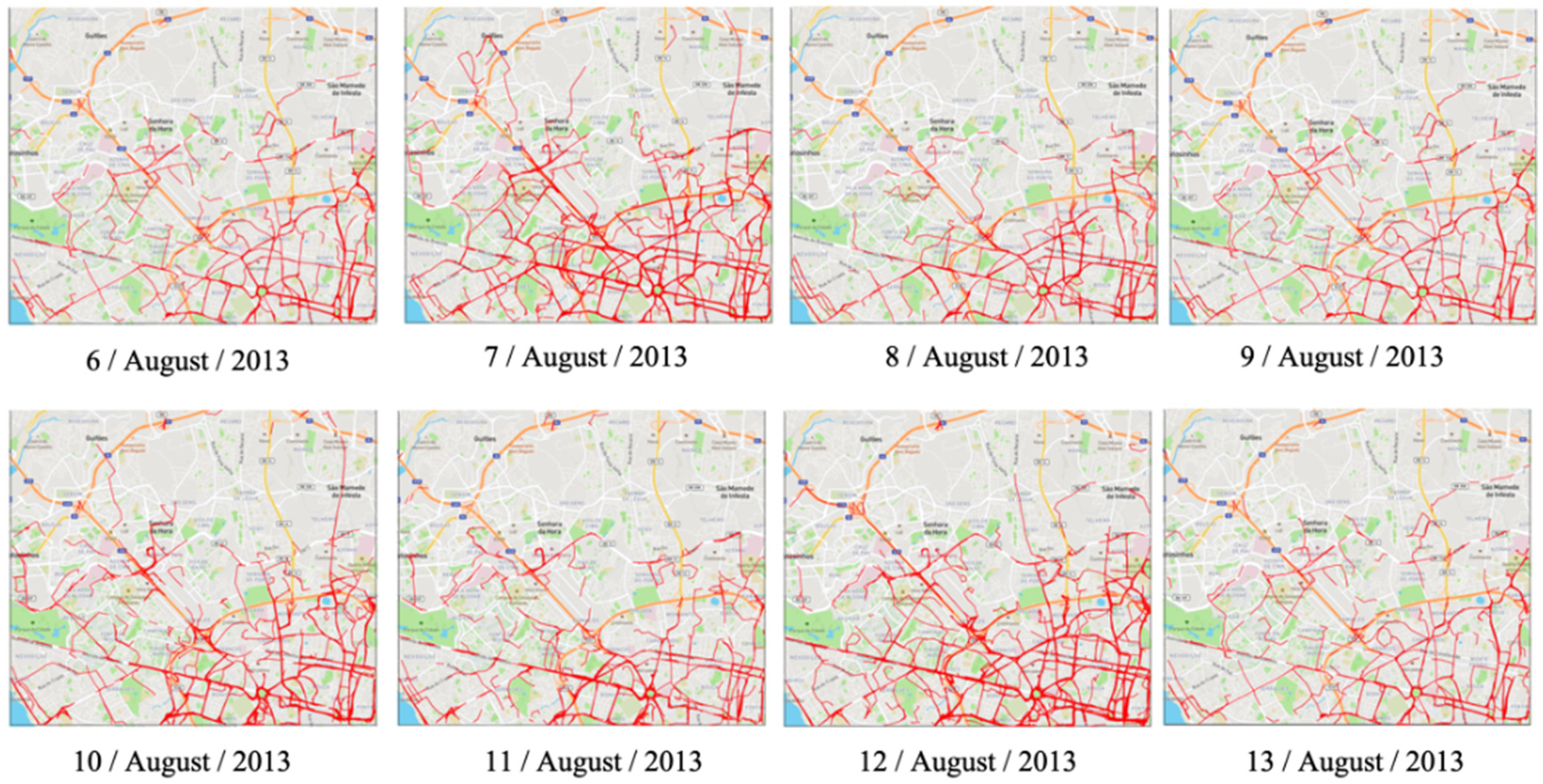
3.4. Fourth Experiment
- From 08:00 to 10:00 on 6 August 2013 there was less slowness in the cell.
- Around the roundabout, there was more slowness than in the other parts of the cell.
- Avenida Boavista, Rua de Diogo Bothelio, and Autopista do Norte are main streets that usually have slow segments and critical points in the cell.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- MaxSpeed 30 km/h




- MaxSpeed 10 km/h




References
- Ranacher, P.; Tzavella, K. How to Compare Movement? A Review of Physical Movement Similarity Measures in Geographic Information Science and Beyond. Cartogr. Geogr. Inf. Sci. 2014, 41, 286–307. [Google Scholar] [CrossRef] [PubMed]
- Magdy, N.; Sakr, M.A.; El-Bahnasy, K. A Generic Trajectory Similarity Operator in Moving Object Databases. Egypt. Inform. J. 2017, 18, 29–37. [Google Scholar] [CrossRef]
- Dodge, S.; Weibel, R.; Lautenschütz, A.-K. Towards a Taxonomy of Movement Patterns. Inf. Vis. 2008, 7, 240–252. [Google Scholar] [CrossRef]
- Yanagisawa, Y.; Satoh, T. Clustering Multidimensional Trajectories Based on Shape and Velocity. In Proceedings of the 22nd International Conference on Data Engineering Workshops (ICDEW’06), Atlanta, GA, USA, 3–7 April 2006; p. 12. [Google Scholar]
- Güting, R.H.; Schneider, M. The Morgan Kaufmann Series in Data Management Systems. In Moving Objects Databases; Elsevier Science: San Francisco, CA, USA, 2005; ISBN 9780080470757. [Google Scholar]
- Andrienko, N.; Andrienko, G. Visual Analytics of Movement: An Overview of Methods, Tools and Procedures. Inf. Vis. 2013, 12, 3–24. [Google Scholar] [CrossRef]
- Chen, W.; Guo, F.; Wang, F.-Y. A Survey of Traffic Data Visualization. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2970–2984. [Google Scholar] [CrossRef]
- Rao, A.M.; Rao, K.R. Measuring Urban Traffic Congestion—A Review. Int. J. Traffic Transp. Eng. 2012, 2, 286–305. [Google Scholar] [CrossRef]
- Kohan, M.; Ale, J.M. Discovering Traffic Congestion through Traffic Flow Patterns Generated by Moving Object Trajectories. Comput. Environ. Urban Syst. 2019, 80, 1–14. [Google Scholar] [CrossRef]
- Raffaetà, A.; Leonardi, L.; Marketos, G.; Andrienko, G.; Andrienko, N.; Frentzos, E.; Giatrakos, N.; Orlando, S.; Pelekis, N.; Roncato, A.; et al. Visual Mobility Analysis Using T-Warehouse. Int. J. Data Warehous. Min. 2011, 7, 1–23. [Google Scholar] [CrossRef]
- Alsahfi, T.; Almotairi, M.; Elmasri, R. A Survey on Trajectory Data Warehouse. Spat. Inf. Res. 2020, 28, 53–66. [Google Scholar] [CrossRef]
- Malinowski, E.; Zimányi, E. Advanced Data Warehouse Design; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Leonardi, L.; Orlando, S.; Raffaetà, A.; Roncato, A.; Silvestri, C.; Andrienko, G.; Andrienko, N. A General Framework for Trajectory Data Warehousing and Visual OLAP. GeoInformatica 2014, 18, 273–312. [Google Scholar] [CrossRef]
- Beliakov, G.; Gagolewski, M.; James, S.; Pace, S.; Pastorello, N.; Thilliez, E.; Vasa, R. Measuring Traffic Congestion: An Approach Based on Learning Weighted Inequality, Spread and Aggregation Indices from Comparison Data. Appl. Soft Comput. 2018, 67, 910–919. [Google Scholar] [CrossRef]
- de Almeida, D.; de Souza Baptista, C.; de Andrade, F.; Soares, A. A Survey on Big Data for Trajectory Analytics. ISPRS Int. J. Geo-Inf. 2020, 9, 88. [Google Scholar] [CrossRef]
- Wang, S.; Bao, Z.; Culpepper, J.S.; Cong, G. A Survey on Trajectory Data Management, Analytics, and Learning. ACM Comput. Surv. 2021, 54, 1–36. [Google Scholar] [CrossRef]
- U.S. Department of Transportation, Federal Highway Administration. Traffic Analysis Tools Program. Available online: https://ops.fhwa.dot.gov/trafficanalysistools/type_tools.htm (accessed on 6 January 2023).
- Traffic Micro-simulation model. Multicriteria Planning (Mcrit Ltd). Available online: https://mcrit.com/services/systems-and-software-development/traffic-micro-simulation-models (accessed on 6 January 2023).
- Afrin, T.; Yodo, N. A Survey of Road Traffic Congestion Measures towards a Sustainable and Resilient Transportation System. Sustainability 2020, 12, 4660. [Google Scholar] [CrossRef]
- Yuan, H.; Li, G. A Survey of Traffic Prediction: From Spatio-Temporal Data to Intelligent Transportation. Data Sci. Eng. 2021, 6, 63–85. [Google Scholar] [CrossRef]
- Di Felice, P.; Clementini, E. Topological Relationships. In Encyclopedia of Database Systems; Liu, L., Özsu, M.T., Eds.; Springer: Boston, MA, USA, 2009; pp. 3140–3143. ISBN 978-0-387-39940-9. [Google Scholar]
- Allen, J.F. Maintaining Knowledge about Temporal Intervals. Commun. ACM 1983, 26, 832–843. [Google Scholar] [CrossRef]
- Dua, D.; Graff, C. UCI Machine Learning Repository; School of Information and Computer Science, University of California: Irvine, CA, USA, 2019; Available online: https://archive.ics.uci.edu/ml/datasets/Taxi+Service+Trajectory+-+Prediction+Challenge,+ECML+PKDD+2015 (accessed on 10 October 2022).
- He, F.; Yan, X.; Liu, Y.; Ma, L. A Traffic Congestion Assessment Method for Urban Road Networks Based on Speed Performance Index. Procedia Eng. 2016, 137, 425–433. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-Term Traffic Forecasting: Where We are and Where We’re Going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19. [Google Scholar] [CrossRef]
- Salau, T.A.O.; Adeyefa, A.O.; Oke, S.A. Vehicle Speed Control Using Road Bumps. Transport 2004, 19, 130–136. [Google Scholar] [CrossRef]
- Ossama, O.; Mokhtar, H.M.O.; El-Sharkawi, M.E. An Extended K-Means Technique for Clustering Moving Objects. Egypt. Inform. J. 2011, 12, 45–51. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions (a) guarantees the spatial inclusion of all the CPs of a segment in the cell R[v, w]. (b) guarantees the temporal inclusion of all the CPs of a segment in the temporal segment associated with the cell R[v, w]. (c) and (d) guarantee that the segment is the one with the maximum size with respect to conditions (a) and (b). (e) guarantees that the speed among all the consecutive CPs of a segment is less than MaxSpeed. (f) and (g) guarantee that the segment has the maximum number of CPs with respect to conditions (a), (b), and (e). | |
| Segment Type | Conditions |
| Segment | (a) and (b) |
| Maximal segment | (a), (b), (c), and (d) |
| Slow segment | (a), (b), and (e) |
| Maximal slow segment | (a), (b), (e), (f), and (g) |
| TempSeg | Cell | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | |
| (00:00, 02:00] | ND | 0.471 | ND | ND | 0.089 | 0.268 | 0.606 | ND | 0.153 | 0.331 | 0.438 | ND | ND | 0.485 | ND | ND |
| (02:00, 04:00] | 0.048 | 0.405 | ND | ND | 0.157 | 0.331 | 0.569 | ND | ND | 0.423 | 0.569 | ND | ND | ND | ND | 0.601 |
| (04:00, 06:00] | 0.539 | 0.514 | ND | ND | 0.069 | 0.405 | 0.650 | ND | ND | 0.421 | 0.534 | 0.247 | ND | ND | ND | ND |
| (06:00, 08:00 | ND | 0.568 | ND | ND | 0.091 | 0.374 | 0.586 | 0.264 | 0.571 | 0.438 | 0.627 | ND | ND | 0.622 | ND | ND |
| (08:00, 10:00] | 0.409 | 0.782 | ND | ND | 0.083 | 0.396 | 0.659 | ND | 0.399 | 0.424 | 0.474 | 0.345 | 0.107 | 0.320 | 1 | ND |
| (10:00, 12:00] | 0.176 | 0.587 | ND | ND | 0.094 | 0.381 | 0.734 | 0.408 | 0.4401 | 0.452 | 0.528 | 1 | ND | 1 | 0.352 | 0.090 |
| (12:00, 14:00] | 0.064 | 0.660 | ND | ND | 0.068 | 0.404 | 0.691 | 0.507 | ND | 0.500 | 0.505 | ND | ND | ND | ND | ND |
| (14:00, 16:00] | 0.514 | 0.627 | ND | ND | 0.828 | 0.436 | 0.727 | ND | ND | 0.458 | 0.494 | ND | ND | 1 | 0.587 | ND |
| (16:00, 18:00] | ND | 0.570 | ND | ND | 0.169 | 0.455 | 0.738 | ND | 0.889 | 0.455 | 0.504 | ND | ND | 1 | ND | ND |
| (18:00, 20:00] | ND | 0.594 | ND | ND | 0.085 | 0.414 | 0.619 | 0.055 | 0.456 | 0.398 | 0.458 | ND | 0.537 | 0.220 | ND | ND |
| (20:00, 22:00] | 0 | 0.274 | ND | ND | 0.101 | 0.364 | 0.646 | 0.206 | 0.500 | 0.362 | 0.419 | 0.504 | ND | 0.313 | 0.435 | ND |
| (22:00, 00:00] | 0 | 0.449 | ND | ND | 0.112 | 0.271 | 0.598 | 0.138 | 0.277 | 0.320 | 0.374 | 0.257 | ND | 0.528 | 0.413 | ND |
| TempSeg | Cell | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | |
| (00:00, 02:00] | ND | 0.327 | ND | ND | 0.056 | 0.173 | 0.433 | ND | 0.039 | 0.211 | 0.275 | ND | ND | 0.485 | ND | ND |
| (02:00, 04:00] | 0.025 | 0.257 | ND | ND | 0.100 | 0.218 | 0.439 | ND | ND | 0.276 | 0.392 | ND | ND | ND | ND | 0.441 |
| (04:00, 06:00] | 0.240 | 0.371 | ND | ND | 0.053 | 0.280 | 0.496 | ND | ND | 0.277 | 0.383 | 0.189 | ND | ND | ND | ND |
| (06:00, 08:00 | ND | 0.358 | ND | ND | 0.068 | 0.250 | 0.458 | ND | 0.448 | 0.290 | 0.442 | ND | ND | 0.062 | ND | ND |
| (08:00, 10:00] | 0.250 | 0.494 | ND | ND | 0.051 | 0.266 | 0.501 | ND | 0.236 | 0.260 | 0.298 | 0.274 | 0.0 | 0.128 | 0.769 | ND |
| (10:00, 12:00] | 0.155 | 0.379 | ND | ND | 0.080 | 0.256 | 0.572 | ND | 0.272 | 0.292 | 0.325 | 0.776 | ND | 0.025 | 0.102 | 0.090 |
| (12:00, 14:00] | 0.042 | 0.507 | ND | ND | 0.047 | 0.275 | 0.523 | ND | ND | 0.330 | 0.319 | ND | ND | ND | ND | ND |
| (14:00, 16:00] | 0.226 | 0.426 | ND | ND | 0.434 | 0.293 | 0.553 | ND | ND | 0.276 | 0.329 | ND | ND | 0.359 | 0.237 | ND |
| (16:00, 18:00] | ND | 0.418 | ND | ND | 0.117 | 0.295 | 0.567 | ND | 0.560 | 0.273 | 0.308 | ND | ND | 1.000 | ND | ND |
| (18:00, 20:00] | ND | 0.320 | ND | ND | 0.038 | 0.271 | 0.456 | ND | 0.411 | 0.231 | 0.272 | ND | 0.275 | 0.102 | ND | ND |
| (20:00, 22:00] | 0 | 0.234 | ND | ND | 0.059 | 0.231 | 0.494 | ND | 0.300 | 0.218 | 0.247 | 0.261 | ND | 0.151 | 0.435 | ND |
| (22:00, 00:00] | 0 | 0.251 | ND | ND | 0.076 | 0.172 | 0.439 | ND | 0.109 | 0.202 | 0.226 | 0.202 | ND | 0.377 | 0.206 | ND |
| Date | TempSeg | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (00:00, 02:00] | (02:00, 04:00] | (04:00, 06:00] | (06:00, 08:00] | (08:00, 10:00] | (10:00, 12:00] | (12:00, 14:00] | (14:00, 16:00] | (16:00, 18:00] | (18:00, 20:00] | (20:00, 22:00] | (22:00, 00:00] | |
| 3 August 2013 | 0.411 | 0.473 | 0.503 | 0.507 | 0.489 | 0.524 | 0.525 | 0.529 | 0.538 | 0.473 | 0.448 | 0.391 |
| 4 August 2013 | 0.394 | 0.405 | 0.463 | 0.449 | 0.437 | 0.479 | 0.516 | 0.469 | 0.473 | 0.439 | 0.370 | 0.280 |
| 5 August 2013 | 0.374 | 0.544 | 0.539 | 0.492 | 0.520 | 0.540 | 0.541 | 0.495 | 0.486 | 0.420 | 0.396 | 0.318 |
| 6 August 2013 | 0.380 | 0.525 | 0.549 | 0.515 | 0.578 | 0.551 | 0.552 | 0.500 | 0.492 | 0.498 | 0.412 | 0.351 |
| 7 August 2013 | 0.408 | 0.538 | 0.531 | 0.490 | 0.565 | 0.565 | 0.580 | 0.511 | 0.487 | 0.462 | 0.394 | 0.374 |
| 8 August 2013 | 0.440 | 0.525 | 0.524 | 0.473 | 0.588 | 0.574 | 0.568 | 0.510 | 0.463 | 0.448 | 0.429 | 0.363 |
| 9 August 2013 | 0.426 | 0.535 | 0.557 | 0.466 | 0.565 | 0.537 | 0.547 | 0.535 | 0.552 | 0.474 | 0.438 | 0.396 |
| 10 August 2013 | 0.412 | 0.483 | 0.495 | 0.449 | 0.457 | 0.509 | 0.502 | 0.500 | 0.534 | 0.482 | 0.447 | 0.412 |
| 11 August 2013 | 0.411 | 0.411 | 0.458 | 0.385 | 0.451 | 0.468 | 0.481 | 0.512 | 0.475 | 0.414 | 0.381 | 0.315 |
| 12 August 2013 | 0.412 | 0.513 | 0.537 | 0.485 | 0.556 | 0.565 | 0.560 | 0.487 | 0.478 | 0.458 | 0.400 | 0.351 |
| 13 August 2013 | 0.409 | 0.508 | 0.527 | 0.471 | 0.540 | 0.564 | 0.545 | 0.490 | 0.505 | 0.494 | 0.449 | 0.352 |
| 14 August 2013 | 0.370 | 0.530 | 0.536 | 0.485 | 0.543 | 0.576 | 0.568 | 0.479 | 0.528 | 0.466 | 0.448 | 0.384 |
| 15 August 2013 | 0.384 | 0.419 | 0.467 | 0.417 | 0.467 | 0.464 | 0.510 | 0.507 | 0.490 | 0.473 | 0.393 | 0.363 |
| 16 August 2013 | 0.407 | 0.496 | 0.542 | 0.471 | 0.544 | 0.529 | 0.552 | 0.484 | 0.519 | 0.497 | 0.432 | 0.404 |
| 17 August 2013 | 0.386 | 0.471 | 0.508 | 0.427 | 0.500 | 0.561 | 0.543 | 0.497 | 0.530 | 0.474 | 0.429 | 0.374 |
| 18 August 2013 | 0.391 | 0.417 | 0.429 | 0.412 | 0.493 | 0.475 | 0.505 | 0.461 | 0.481 | 0.421 | 0.423 | 0.317 |
| 19 August 2013 | 0.391 | 0.529 | 0.555 | 0.494 | 0.535 | 0.550 | 0.548 | 0.517 | 0.524 | 0.442 | 0.394 | 0.337 |
| 20 August 2013 | 0.381 | 0.494 | 0.522 | 0.472 | 0.546 | 0.559 | 0.560 | 0.493 | 0.532 | 0.468 | 0.399 | 0.354 |
| 21 August 2013 | 0.374 | 0.487 | 0.522 | 0.477 | 0.533 | 0.528 | 0.569 | 0.508 | 0.493 | 0.471 | 0.424 | 0.354 |
| 22 August 2013 | 0.379 | 0.480 | 0.521 | 0.509 | 0.561 | 0.568 | 0.545 | 0.527 | 0.502 | 0.434 | 0.342 | 0.391 |
| 23 August 2013 | 0.418 | 0.521 | 0.533 | 0.485 | 0.548 | 0.550 | 0.563 | 0.517 | 0.512 | 0.467 | 0.410 | 0.395 |
| 24 August 2013 | 0.378 | 0.463 | 0.512 | 0.461 | 0.495 | 0.548 | 0.580 | 0.528 | 0.534 | 0.488 | 0.433 | 0.392 |
| 25 August 2013 | 0.363 | 0.411 | 0.486 | 0.433 | 0.479 | 0.518 | 0.522 | 0.459 | 0.528 | 0.426 | 0.362 | 0.324 |
| 26 August 2013 | 0.385 | 0.506 | 0.508 | 0.490 | 0.583 | 0.569 | 0.556 | 0.485 | 0.519 | 0.423 | 0.380 | 0.322 |
| 27 August 2013 | 0.382 | 0.522 | 0.514 | 0.485 | 0.572 | 0.545 | 0.555 | 0.513 | 0.524 | 0.431 | 0.350 | 0.340 |
| 28 August 2013 | 0.388 | 0.503 | 0.533 | 0.520 | 0.554 | 0.552 | 0.543 | 0.530 | 0.519 | 0.430 | 0.436 | 0.366 |
| 29 August 2013 | 0.408 | 0.492 | 0.517 | 0.498 | 0.596 | 0.576 | 0.539 | 0.502 | 0.509 | 0.459 | 0.420 | 0.354 |
| 20 August 2013 | 0.382 | 0.543 | 0.530 | 0.470 | 0.532 | 0.562 | 0.565 | 0.501 | 0.530 | 0.492 | 0.431 | 0.372 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moreno Arboleda, F.J.; Garani, G.; Zea Gallego, S. Towards Moving Objects Behavior Analysis: Region Speed Limit Rate Measure. Informatics 2023, 10, 15. https://doi.org/10.3390/informatics10010015
Moreno Arboleda FJ, Garani G, Zea Gallego S. Towards Moving Objects Behavior Analysis: Region Speed Limit Rate Measure. Informatics. 2023; 10(1):15. https://doi.org/10.3390/informatics10010015
Chicago/Turabian StyleMoreno Arboleda, Francisco Javier, Georgia Garani, and Simon Zea Gallego. 2023. "Towards Moving Objects Behavior Analysis: Region Speed Limit Rate Measure" Informatics 10, no. 1: 15. https://doi.org/10.3390/informatics10010015
APA StyleMoreno Arboleda, F. J., Garani, G., & Zea Gallego, S. (2023). Towards Moving Objects Behavior Analysis: Region Speed Limit Rate Measure. Informatics, 10(1), 15. https://doi.org/10.3390/informatics10010015