1. Introduction
The Gauss-exponential distribution plays an important role as a high risk limit law; see Sections 8 and 9 of the lectures presented in
Balkema and Embrechts (
2007) on high risk scenarios and extremes. Needless to recall here are the numerous different fields where quantitative risk management applies. The Gauss-exponential distribution can be considered as a particular asymmetric derivation of the Gauss–Laplace law. In particular, Gauss-exponential probabilities of arbitrary events can be dealt with by considering the corresponding Gauss–Laplace probabilities. Density level sets of the standard Gauss–Laplace distribution are topological boundaries of star bodies centered at the origin. The Minkowski functionals of the corresponding star bodies, however, are not homogeneous functions of order one, as is often assumed in the literature on star-shaped distributions. Instead, the bodies corresponding to different density levels reflect different geometric properties and are typically directed in different directions. The aim of the present paper is to model
-spherical generalizations of the two-dimensional Gauss–Laplace distribution. We prove geometric and stochastic representations, which can be considered as standard tools for dealing with the present distributions later on in a way similar to how one has already for a long time successfully been dealing with elliptically-contoured and, since more recently, even with more general homogeneous star-shaped distributions. This will be shortly indicated here by generalizing the Box–Muller simulation method.
It is well known from two-dimensional spherical distribution theory that a random vector
X following such distribution allows a stochastic representation
with independent non-negative random variable
R and singular (with respect to the Lebesgue measure in
) random vector
U being uniformly distributed on the Euclidean unit circle. Understanding the suitable way of generalizing the latter distribution requires the most effort in general homogeneous star-shaped distribution theory. The corresponding singular distribution is dealt with by several authors (even in higher dimensions) by considering densities of marginal variables (vectors); see (
Yue and Ma 1995) and (
Song and Gupta 1997) for the particular case of
-spherical distributions. Studying a disintegration formula for this case, it is proven in (
Rachev and Rueschendorf 1991) that the geometric surface measure cannot coincide with their uniform distribution if
. Moreover, the authors mention that ‘its treatment seems to need a completely different proof than the proof for the uniform distribution given in this (their) paper.’ In (
Schechtman and Zinn 1990), the authors exploit properties of the distribution being called the uniform distribution on
-spheres in (
Rachev and Rueschendorf 1991), by making use of a representation of it later called a cone measure representation; see (
Barte et al. 2005). An insightful Kepler law interpretation of this measure is discussed in (
Wallen 1995). A coordinate-based approach to describing uniform distributions on
-spheres is given in (
Szablowski 1998) where it is inter alia said that ‘it seems that the usage of the word
uniform’ ... ’ does not refer to the real, geometrical uniformity of the probability mass on the surface of the unit sphere in
n-dimensional
’. The differential geometric explanation of the generalized uniform distribution given for the particular case of
-spheres for arbitrary finite dimension in
Richter (
2009) (and for dimension two already in two earlier papers on the circle number function mentioned there) provided a qualitatively new approach to this long standing measure theoretical problem. Elliptically contoured and more general homogeneous star-shaped distributions are studied analogously in (
Richter 2011a,
2013,
2014,
2015a,
2015b,
2016a,
2016b) based on the consideration of suitably-introduced non-Euclidean geometries.
Much effort is expected to be necessary to give a suitable explanation of the geometric nature of a uniform distribution in the present case that the Minkowski functional of the density contour sets defining the star body is not homogeneous of order one. In going through all of the necessary steps to reach such an interpretation, we will be confronted with generalizing the notions of circle and its radius, as well as its circumference and with an extension of the sector and circle number functions. In the homogeneous case, that is if the mentioned Minkowski functional is homogeneous of order one, the analogous steps can be observed in
Richter (
2007) and in the author’s series of papers mentioned before. Even more information on the history of the mentioned measure theoretical problem can be found there.
Among others, a technical key role will be played here by the suitable choice of coordinates for describing generalized uniform distributions. Moreover, we make a next basic step of extending the sector and circle number functions to classes of generalized circles having different geometric properties for different values of their generalized radii.
The density of the standard Gauss–Laplace law
in
is given by:
Let us consider the
-spherical generalized normal density:
where
,
and
. We note that
and
and
are two-dimensional standard Gauss and Laplace distribution laws, respectively.
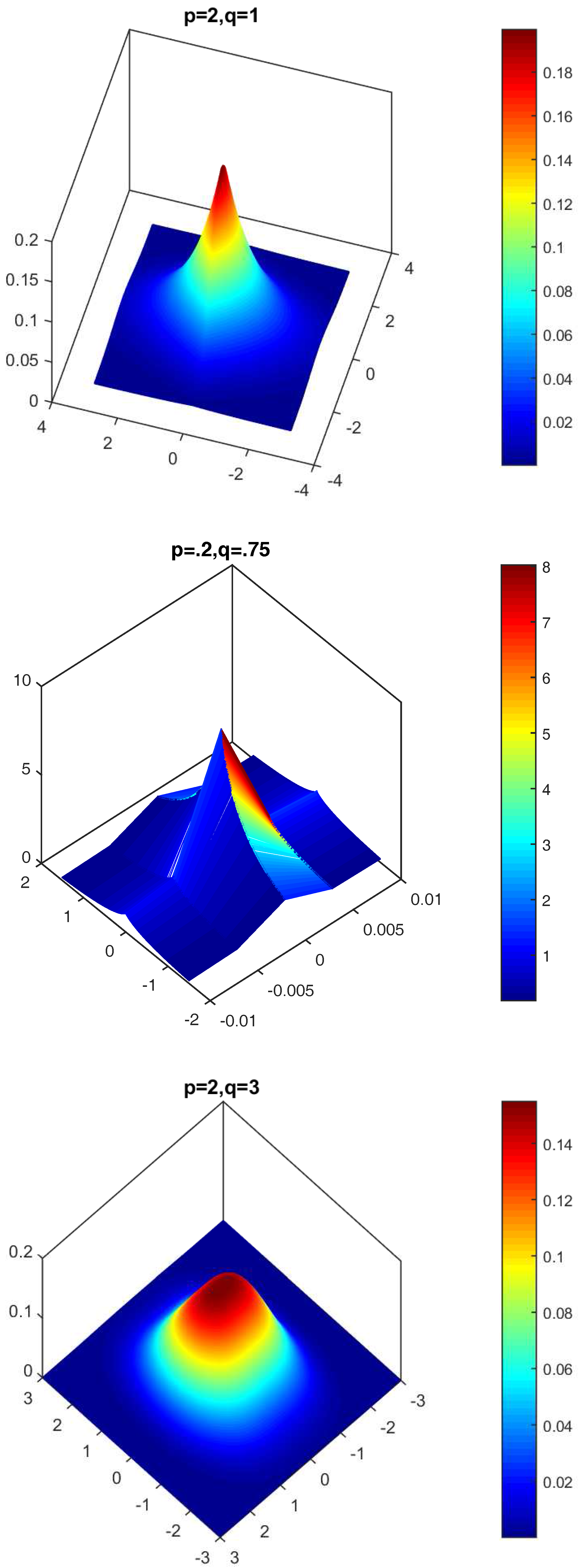
Figure 1 shows
-spherical densities for different choices of
.
The case
has been considered elsewhere, and we emphasize that this case will not be dealt with in the present paper. Thus,
is assumed here. Let:
denote the functional generating the density level sets or contour lines:
Such a level set can be generated from the
-generalized unit circle
by matrix multiplication:
and will be called the
-circle of
-radius
r. Here,
with
denoting the diagonal matrix with diagonal entries
a and
b. The star body:
having the origin in its interior and
as its topological boundary will be called the
-circle disc of
-radius
r. It satisfies the subset relation:
and allows the representation:
Such a disc is convex if
and
and is radially concave if
and
. For the latter notion, we refer to (
Moszyńska and Richter 2012).
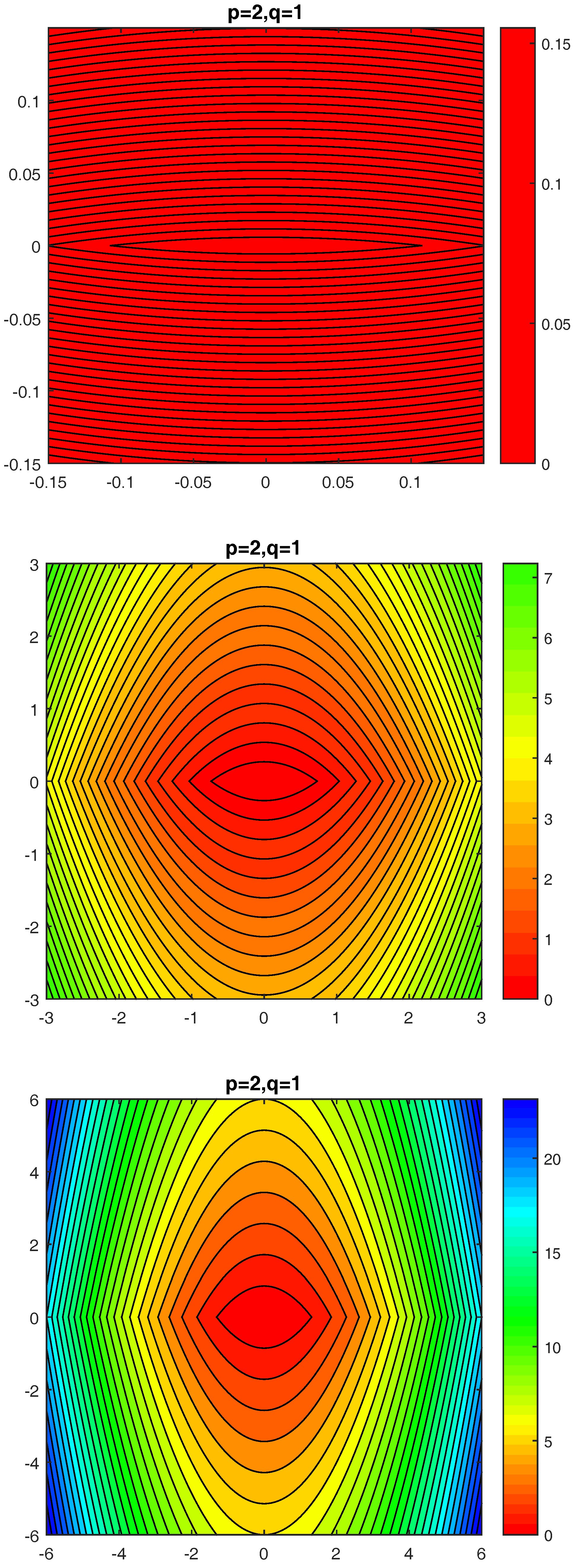
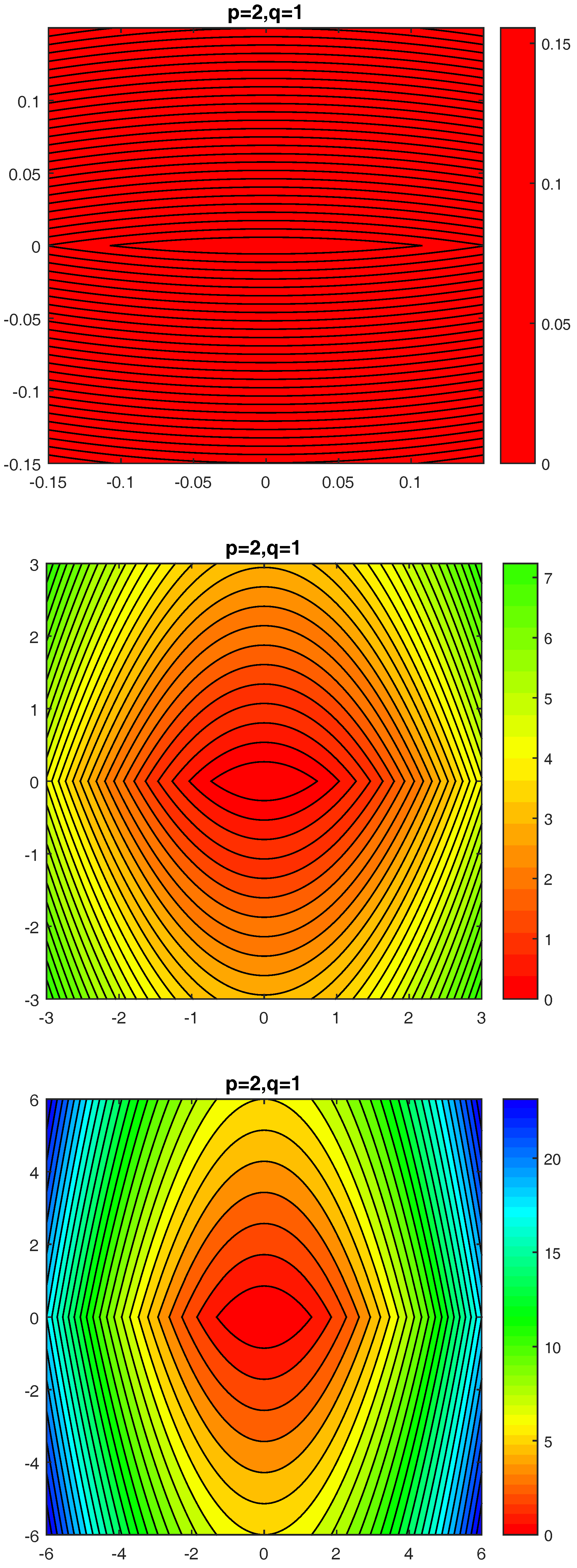
Figure 2 (drawn with MATLAB, as
Figure 1) shows
-circles
according to different values of the
-generalized radius
r, starting from a local (central) and turning to more global view. Roughly said, the impression of the main orientation of density level lines is changing within two steps from ‘west-east’ to ‘south-north’.
The paper is organized as follows.
Section 2 presents preliminary material on
-generalizations of the common polar coordinates, the notions of arc-length and geometric disintegration, the sector and circle number functions and the generalized uniform distribution on a generalized circle. After further developing the general methodology from the theory of homogeneous star-shaped distributions, we are in a position to formally introduce the family of
-spherical distributions in
Section 3 including the
-generalized normal distributions as particular cases of such distributions having a density.
Section 4 deals with a geometric generalization of the asymmetric Gauss-exponential law, and
Section 5 is devoted to some aspects of simulation. The discussion in
Section 6 delivers a look back to and ahead toward the present distribution theory. Finally, we give some conclusions in
Section 7.
3. On the -Spherical Generalization of the Gauss–Laplace Law
The following analogue to Theorem 2 is our starting point for introducing here the new general family of -spherical distributions.
Theorem 3. Let a random vector follow the -spherical distribution law , and put . The random vector follows the -generalized uniform distribution on and is independent of the random variable R, and R has the density with respect to the Lebesgue measure on the real line: Proof. The cumulative distribution function of
R is:
Because of:
it follows that:
Furthermore, for
and
☐
Remark 2. According to Theorem 3, if , then X allows the stochastic representation:where follows the -spherical uniform distribution, , and R has the density (14) and is independent of . The following definition is well motivated by Remark 2.
Definition 4. (a) Let follow the -spherical uniform distribution on the Borel σ-field of the -unit circle , and R a non-negative random variable having cumulative distribution function F and characteristic function ϕ and being independent of , then:is said to follow the -spherical distribution . The vector is called the -spherical uniform basis and R the generating variate of X. The distribution of X will alternatively be denoted if R has density function f. (b) An arbitrary random vector X taking values in is called -spherically distributed if there exists a nonnegative random variable R being independent of a -spherical uniformly-distributed random vector U, such that .
Here, means that random vector Y is distributed as random vector Z.
Theorem 4. The characteristic function of a -spherically distributed random vector X satisfying the representation can be written as:where and denote the distribution law induced by the random variable R and the characteristic function of the -spherical uniform distribution, respectively. Proof. Because
R and
U are independent,
and by Fubini’s theorem,
☐
Corollary 1. (a) The distribution of a -spherically distributed random vector X is uniquely determined by the distribution of its generating variate R.
(b) If a -spherically distributed random vector X has a density, then it is of the form ,where is a density generating function (dgf) satisfying:and the normalizing constant allows the factorization: Proof. (a) If with and being independent of U, and , then, by Theorem 4, .
(b) Because the distribution of a
-spherically distributed random vector
with nonnegative
R being independent of
U,
, is already determined by the distribution of
R, the density of
X is already determined by the density of
R. By Fubini’s theorem,
☐
In what follows, we denote the distribution law of a -spherically distributed random vector having dgfg by . The following theorem deals with a geometric representation of such measures.
Theorem 5. For every ,
Proof. Because of:
,
Since
if and only if
, it follows that:
☐
The geometric measure representation in Theorem 5 will be called a dynamic geometric disintegration of the -spherical measure .
Corollary 2. Let and . Then, R follows the density: Proof. Let
. Theorem 5 applies with
, and
R follows the density:
☐
Finally, we note that Corollary 2 generalizes Formula (14). That is, if in Corollary 2, then and
4. Asymmetric -Spherical Generalization of the Gauss-Exponential Law
The Gauss-exponential density and the Gauss–Laplace density are connected through the equation . Accordingly, the Gauss-exponential probability of an arbitrary random event from can be dealt with by doubling the corresponding Gauss–Laplace probability. Therefore, the Gauss-exponential law can be considered as an asymmetric derivation of the Gauss–Laplace law.
In (
Balkema and Embrechts 2007), the exponential component of the Gauss-exponential distribution law arises when a Gaussian vector is subject to a certain conditioning process assuming that this vector belongs to a half space having a positive distance from the origin. As one result of this conditioning process, the domain of definition of a multivariate distribution is restricted to a proper subset. If the conditioning process were to be modified, other asymmetric distributions derived from the Gauss–Laplace law could be of interest.
The possible consequences on the geometric measure representation of a multivariate star-shaped distribution law caused by a restriction of the domain of definition to a proper subset are described in Remark 1 in
Richter (
2015b). A similar approach can be of interest here.
The two-dimensional exponential distribution may be considered as a restriction of the distribution
with
(not considered here) to the domain of definition
. For a geometric generalization of the multivariate exponential law, we refer to the class of regular simplicially contoured or
-norm symmetric distributions studied in (
Henschel and Richter 2002). Further results for
p-spherical distributions with
p from
can be found in (
Rachev and Rueschendorf 1991), (
Kamiya et al. 2008) and (
Richter and Schicker 2016).
5. Simulation
First of all, we recall that the radius component of a uniformly on distributed random vector can be simulated according to Remark 1. Numerous others generalized radius distributions may be simulated using various particular methods.
The well-known simulation method in (
Box and Muller 1958) was extended to the
p-generalized normal distribution in (
Kalke and Richter 2013). Similarly, here, we establish a simulation method for arbitrary
-spherically distributed vectors. According to Theorem 2, the vector
follows, independently of the variable
R, the
-spherical uniform distribution on
,
By (
13), the density of angle
is given as:
Starting from this representation, one can proceed as described in (
Kalke and Richter 2013) and
Richter (
2015a), Example 9(b), or any of the standard monographs on simulation mentioned there.
6. Discussion
The way of probabilistic modeling developed in this paper is closely related to various challenging mathematical problems. It is well known from the results in (
Richter 2014,
2016a,
2016b) and the references given there that representations of star-shaped distributions whose contour-defining star body has a homogeneous Minkowski functional of order one are closely related to suitably-chosen non-Euclidean geometries. Here, we discover that there is again a need to go some steps beyond such geometries and realize the first of them.
Already in the 17th Century, basically starting from the work of Descartes, various coordinate systems played a fruitful role in geometric applications. Nevertheless, it seems that suitably chosen coordinates may serve even these days as a powerful tool for solving nontrivial problems in different areas of mathematics. In the present case, star bodies whose Minkowski functionals are not homogeneous functions of degree one are effectively described for the purposes of representing two-dimensional Gauss–Laplace laws and their -spherical generalizations with the help of generalized polar coordinates based on generalized sine and cosine functions.
Starting latest from the work of Leibniz and Newton who founded modern calculus, in many areas of mathematics, one makes use of thin parallel layers when defining and studying certain basic notions. Here, however, small changes of a generalized radius variable related to such a body generate thin layers close to the bodies’ boundary, being nonparallel. To the best of the author’s knowledge, the fundamental measure theoretical problem of understanding the factorization components of cross-sections or disintegrations of the present type seems to be approached here for the first time.
The present work extends the line of interchanging the role that the notions of circle and distance play in comparison with Euclidean geometry, described inter alia in (
Richter 2011a,
2011b). Here, the ‘circle’ is given by a density level set modeling a ‘contour line’ of a sample cloud, and the understanding of what is a ‘distance’ leads to a directionally-dependent notion of radius being related to a matrix-vector multiplication. This remains, however, that the question of what is the differential geometric meaning of the newly-introduced
-generalized arc length measure. Therefore, it is stated here as an open problem.
Finally, we remark that the results in
Section 2 allow the following additional representations of the Lebesgue measure, which may be useful in future applications of
-spherical distributions. For
,
and for
,
An alternative representation is given for
by:



{kind=link}
{kind=link}