1. Introduction
The world is experiencing a super-aged society, in which the population of older people continues to increase annually. In 2019, there were 703 million people aged 65 years and older worldwide, and this number is estimated to double to 1.5 billion in 2050 [
1]. Unfortunately, the increasing older population does not always have a good quality of health and is often dependent on others for assistance.
As people get older and become frail, many of them require long-term care [
2]. Today, a person turning 65 has an almost 70% chance of requiring some type of long-term services and support. Consequently, one-third of older adults who are aged 65 years old today may need long-term care support, of which 20% will need it for longer than 5 years [
3]. In the US, about 1.5 million older people live in nursing homes, and 1 million live in assisted living facilities [
4]. Meanwhile, in Japan, the number of people using long-term care services on a monthly basis reached approximately 5.6 million [
5]. Though long-term care is necessary for older people, it can affect their psychological condition, because they have less contact with the outside world. Patients with long-term hospitalization, especially those who are bed-ridden, might not be able to see outside the hospital, which makes them quite stressed and leads to a deterioration in their quality of life (QOL).
Various information communication technologies and robot systems have been developed to help patients, particularly older people, to eliminate loneliness, and to maintain and improve their QOL [
6,
7]. These are robot systems that aim to provide healing to a patient by having them interact with the robot. Alternatively, as one method for alleviating the loneliness of patients, a drone system expected enabling patients with mental illness to communicate with people in distant places, while also enjoying the scenery in the distant places in real time, using a camera mounted on the drone. Moreover, unlike robots that move using wheels and legs, drones can fly over steps and stairs; therefore, it is thought that the stress of patients with mental illness will be reduced by operating drones. In addition, for patients with mental illness (hereinafter ‘patients’) without opportunities to go out of the hospital because of undergoing long-term medical treatment, it is considered that interacting with people through drones may lead to healing.
Drones have been used in healthcare services, such as transporting blood, vaccines, and other supplies to remote areas [
8]. In a clinical trial by Schierbeck et al. [
9], automated external defibrillator-equipped drones arrived before ambulances for dealing with out-of-hospital cardiac arrests. Aggarwal et al. [
10] conducted a study using a nano-drone with a camera to monitor patients in the intensive care unit. Meanwhile, Kai et al. [
11] evaluated a remote-controlled drone system using an eye-tracking device through the internet to improve the quality of life for patients in bedridden conditions.
However, controlling the drone system using eye tracking might not be easy for older patients who have been bedridden for a long time. Not being familiar with sophisticated advanced technology could also be a challenge for older patients to operate the drone. Hence, the role of intermediaries to assist patients and to facilitate the application of this technology is necessary. Intermediaries, who are generally nurses, play an important role in advocating for patients, and in mediating and associating the patients in the transactive relationship involving intelligent machines, such as healthcare robots [
12]. In the use of communication robots in a community, intermediary roles include understanding the performance and functions of robots, identifying issues and concerns of ethics, morality, security, and safety in using robots, and ensuring physical and mental safety of the community residents during their interactions with robots [
13]. Though the roles of intermediaries in using robots have been discussed in several studies [
13,
14,
15], the roles of intermediaries in the drone system for patients with psychiatric long-term hospitalization have not yet been investigated.
The aim of the study was to describe the role of nurses as intermediaries in the application of a remote-controlled drone system through the eye movements of patients in long-term care.
2. Materials and Methods
2.1. Design
This study employed the Intentional Observational Clinical Research Design (IOCRD) [
16]. IOCRD is a composite of observational research approaches that are aimed to generate data from a simultaneous procedure. IOCRD intended to address phenomena involving the interaction between patients, intermediaries, and technologies with artificial intelligence [
16]. In this study, the researchers applied the intentional observation aspect of IOCRD in order to observe the intermediary’s roles, which enables patients with long-term hospitalization to remotely control the drone using only their eyes.
2.2. Overview of the Operating System
This section describes the drone system and the operation method used in this study.
2.2.1. System
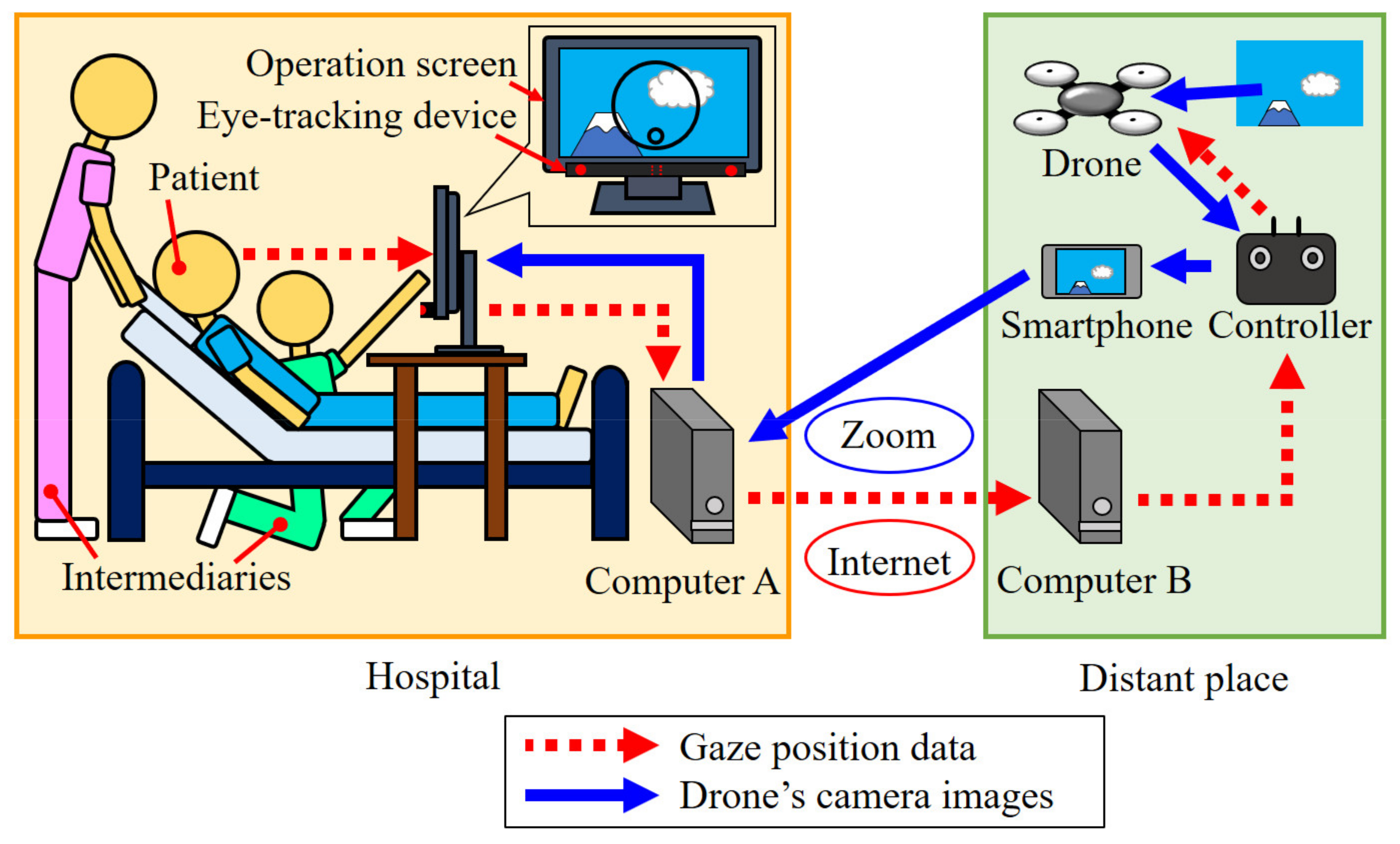
Figure 1 shows the remote-controlled drone system. This system can be controlled automatically by combining independently developed systems (equipment and software) and commercially available systems (equipment and software). This system includes an operation screen, an eye-tracking device (Tobii Eye Tracker 4C, Tobii), computer A, computer B, Internet, a drone (Mavic Mini, DJI), a controller, a smartphone (iPhone XR, Apple), and the web-conferencing service Zoom.
The operation method of the drone is as follows: The eye-tracking device attached to the operation screen detects the patient’s gaze position in the operation screen; the data of this gaze position are sent to computer B at a distant location via computer A and the Internet. The drone is operated via computer B, and the controller is based on the gaze position data. The drone’s camera image is displayed on the operation screen via the controller, the smartphone, Zoom, and computer A. Then, the patient can see the scenery of a distant place on the operation screen.
2.2.2. Operation Screen/Operation Method
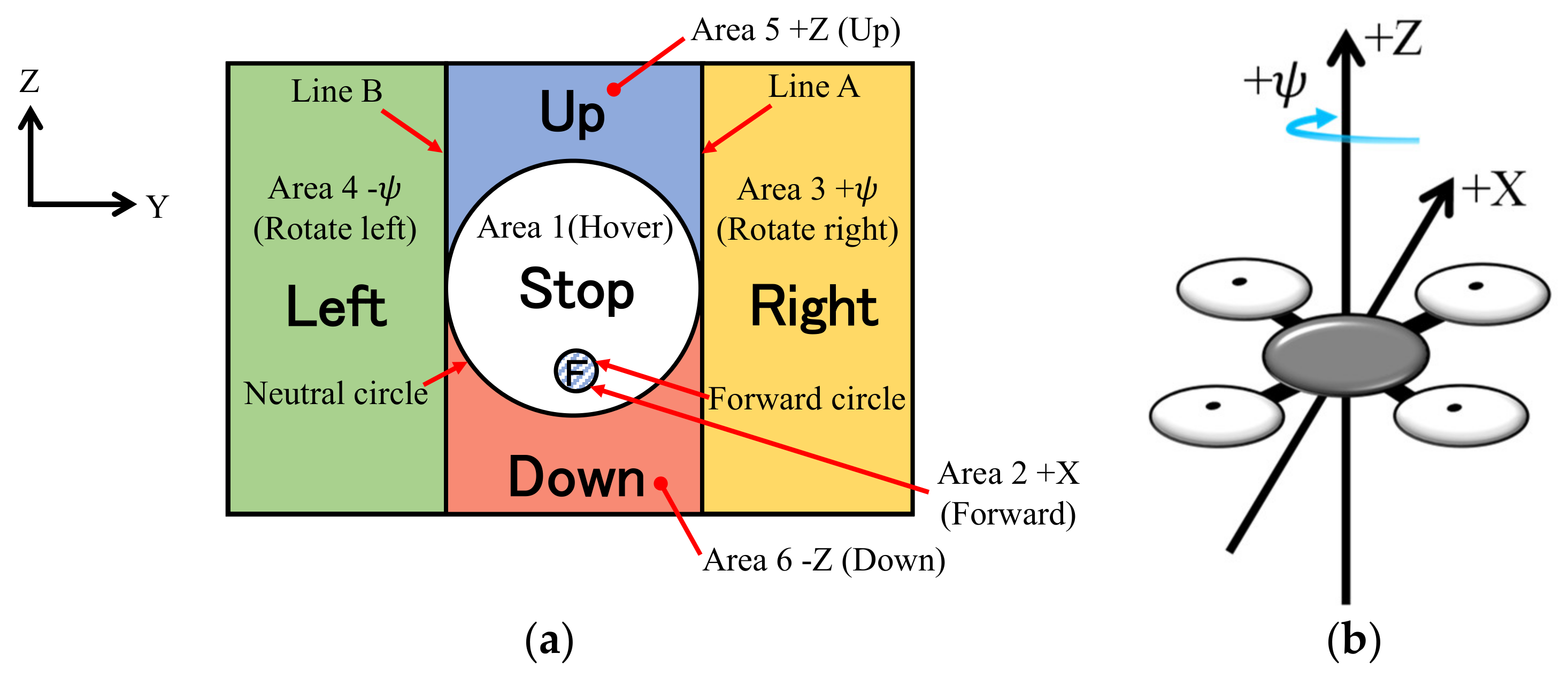
An operation screen was installed, so that patients who need long-term care confined to their beds can easily control the drone system with this operation screen. The operation screen of this system and the coordinates around the drone in flight are shown in
Figure 2. This operation screen is divided into six areas. Area 1 is a neutral circle in the center of the operation screen and excludes area 2. Area 2 is a forward circle below the center of the operation screen and inside area 1. Line A and line B are the tangent lines to the neutral circle in the Z direction. Area 3 is the area on the right side of line A, and area 4 is the area on the left side of line B. Area 5 is the area above area 1, and area 6 is the area below area 1.
The operation method of the drone is as follows: (1) looking at Area 1, the drone is hovering; (2) looking at Area 2, the drone moves forward; (3) looking at Area 3, the drone rotates to the right; (4) looking at Area 4, the drone rotates to the left; (5) looking at Area 5, the drone rises; and (6) looking at Area 6, the drone descends.
On the operation screen, “right,” “left,” “up,” “down,” “forward,” and “stop” are written in Japanese characters so that the patient does not forget the operation method.
2.3. Settings and Participants
This study involved several settings: (1) a laboratory in Tokai University from where the systems of the drones were controlled, (2) a psychiatric hospital ward in Western Japan from where the patients moved the drone with their eye tracking, (3) a large gymnasium in Tokai University where the drone was placed for an indoor experiment, and (4) a rooftop in Tokai University where the drone was placed for an outdoor experiment.
Furthermore, this study involved several participants: (1) two operators from the research team who set up and controlled the drone system, (2) nursing staff, with the role as intermediaries who were familiar with and had experience being involved in the previous experiment using advanced technologies in the ward (e.g., experiment with healthcare robot), (3) patients in the ward who moved the drone by their eye tracking, and (4) students with the roles of checking and ensuring the movement of the drone was within the expected area, and assisting to entertain the patients by waving to the drone camera, which was seen by the patients.
The inclusion criteria for patients included: (1) the ability to follow the instructions from the drone operators, and (2) successful calibration of eye movements for eye tracking.
2.4. Data Collection Procedure
Data collection was conducted in three phases of the clinical research process: (1) pre-experimental phase, (2) experimental phase, and (3) post-experimental phase. The period of drone operation by each patient was around 5–7 min.
There were two types of experimental phases: indoor and outdoor experiments. In the indoor experiment, the drone was flown inside the large gymnasium of Tokai University, whereas in the outdoor experiment, the drone was flown from the rooftop of a building at Tokai University. With these experimental phases, the participation of patients was directed toward engagement in the manipulation of the experimental device (indoor experiment) and patient manipulation of the device to test for patients’ ability to view the outdoor scenery, such as Mount Fuji, capitalizing on the significance of the study, i.e., for patients who are limited by mobility to view the environment outside of their patient rooms.
2.4.1. Pre-Experimental Phase
In this phase, patients’ eyesight was calibrated to enable the manipulation of the eye-tracking device. The calibration phase was conducted in the same manner for both the indoor and outdoor experiments. The calibration process was conducted in the laboratory of Tokai University (for remote operation) and in the ward of the hospital setting (operator for patients’ eye-tracking calibration).
There were two operators setting the calibration: one remote operator set the drone system at Tokai University (Hiratsuka City, Kanagawa Prefecture), and another operator conducted the calibration for eye tracking with patients in the hospital setting. Both operators were members of the research team.
First, the operators explained the operation method to the subjects. Next, the eye- tracking device was calibrated for each patient. The calibration process involved the operator, intermediaries near the patients, and the patients themselves to move the drone using their eyesight with the support of the intermediaries.
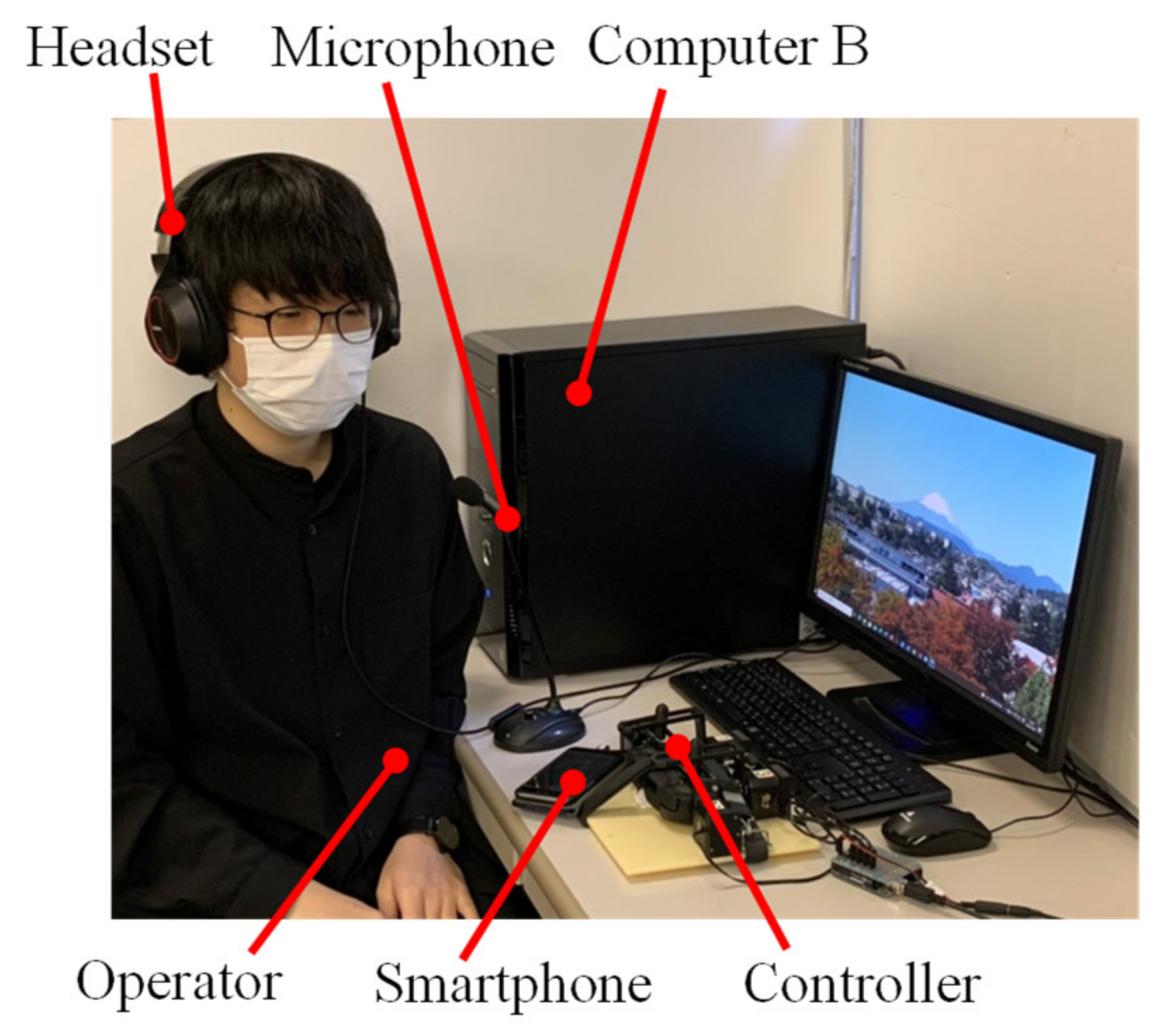
The operator in Tokai University communicated with the operator, intermediaries, and patients in the hospital using a speaker, a microphone, and Zoom application. In addition, next to the patient, computer A was placed and connected to the Internet using mobile Wi-Fi (DISM WiMAX2 + Package Education New Year Edition, DIS mobile (WiMAX)).
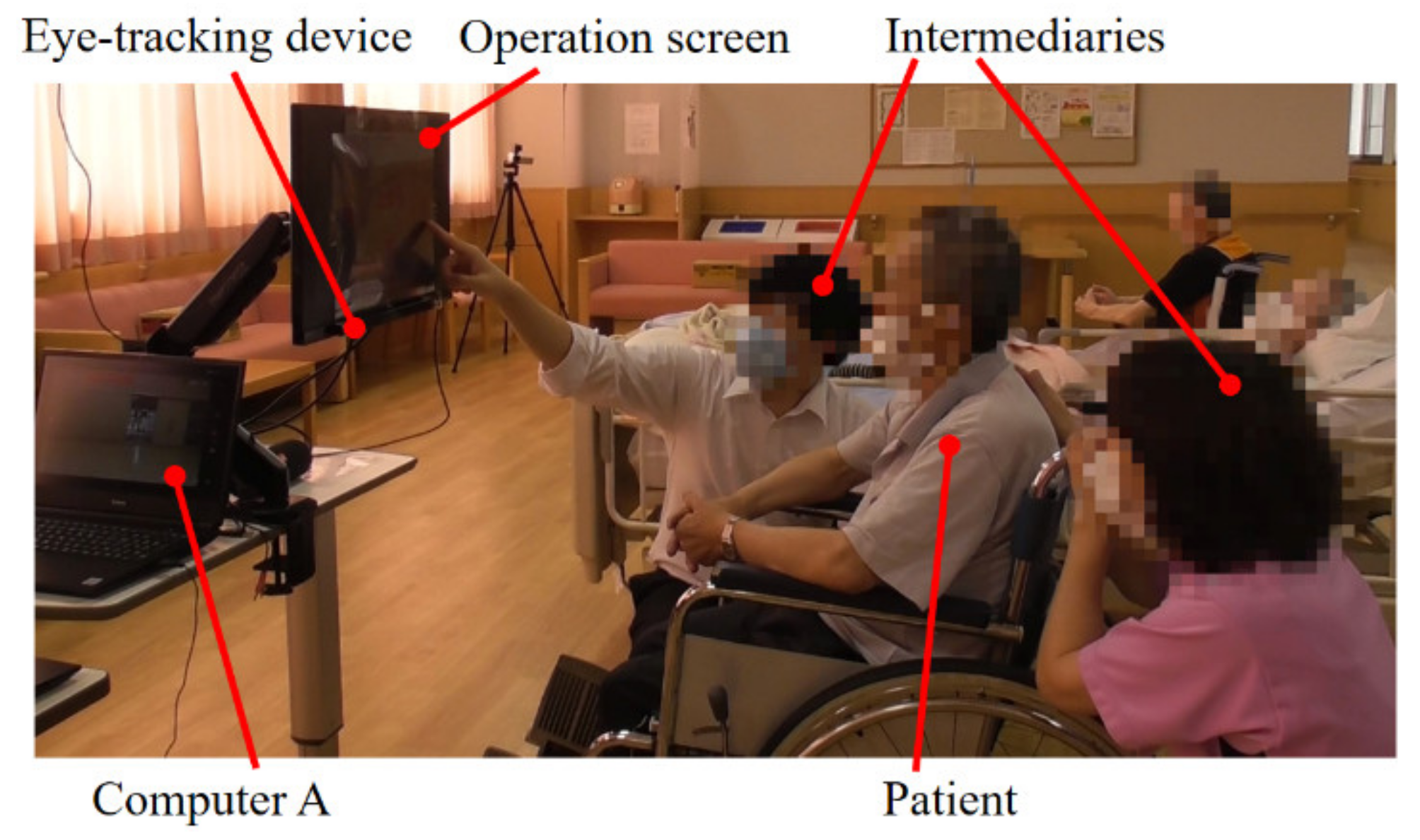
Figure 3 shows the situation of the operator at Tokai University, and
Figure 4 shows the ideal position of the patient in the hospital setting.
2.4.2. Experimental Phase
Patients could start operating the drone once the calibration was successful. In the indoor test, the drone was flown in a large gymnasium at Tokai University, where it could be safely flown. After the drone took off, the patients operated the drone with only their eyes in the order of rotating right, rotating left, ascending, descending, and moving forward. The patients then rotated the drone further to the right and saw Tokai University’s student staff holding flowers and waving their hands, which completed the test.
In the outdoor test, the drone was flown from the rooftop of a building with a good view in Tokai University. After the drone was airborne and the patients saw a student with the message “Welcome to Tokai University,” the patients rotated the drone to the right to enjoy the campus scenery and view images of students who were juggling. There were also students holding a billboard with the message “Thank you for participating.” By rotating further to the right, the patients could see students waving and either a Mt. Fuji photograph or the real scenery. The test was terminated after the patients saw Mt. Fuji (actual or photographed).
2.4.3. Post-Experimental Phase
In this phase, patients who completed the experiment were interviewed regarding their impressions, feelings, difficulties, and overall experience from the start of the experiment to the completion of the study. Significant descriptive terms were noted, particularly those for improving the procedures and robotic systems, as well as patient care in the future. However, because the focus of this study was the description of the role of nurses as intermediaries, patients’ data collected during the post-experimental phase was not included in this study.
2.5. Procedure for Data Analysis
The data collected were observation notes of the activities of the intermediaries in the experiment process. The observer (a researcher from the research team) noted significant activities of the events, especially during the intermediaries’ active engagements. The observation data were transcribed and analyzed by noting significant words and phrases highlighting the roles and activities of the intermediaries. These data were grouped together based on the activities and events observed during the pre-experimental phase (calibration process) and the actual experiment process. The recorded videos of the experiment were reviewed to confirm the noted observations.
2.6. Ethical Considerations
Ethical approval was obtained from the Ethics Committee of Tokai University (approval number: 21029) and the Mifune Hospital Clinical Research Ethics Review Committee (approval number: 20200408). Before data collection, researchers provided an explanation regarding the study and its procedures to the participants. Written consent was obtained from each participant.
4. Discussion
This article discusses the role of intermediaries in the use of a remote-control drone system used by patients, particularly older patients in psychiatric long-term care. Results showed that the use of the drone controlled by patients was effective in bringing joy to patients, as they could connect with outside scenery both live and in real time. Self-report evaluations from patients, which described their experiences as “fun” and “wanting to fly the drone again”, conveyed their joyful experiences in controlling the drone. Thus, the researchers concluded that the remote-control drone system using eye tracking is effective to bring joy and to help improve the well-being of older people in psychiatric long-term care. These results support the assumption that flying the drone by remote control, using the system with only the eyes, could improve QOL in older patients with mental conditions.
Nowadays, nursing is fast becoming a relationship between persons and intelligent machines. Nurses use technologies of care in their practice [
17]. The successful control of the drone by the patients was supported with the critical roles of the intermediaries. The role of intermediaries in transactional relationships between patients and intelligent machines has been discussed by Osaka [
12]. The description of the role of intermediaries in such transactional relationships is important in guiding nursing practice in transactive engagements involving intelligent machines [
12].
In this study, the patients who participated were older people with mental conditions undergoing long-term care, and some were bedridden; therefore, following the operator’s instructions was not easy for them. Here, the intermediaries played important roles throughout the pre-experimental phase and experiment process.
4.1. Pre-Experimental Phase
There were three roles as intermediaries in the pre-experimental phase: (1) Advocate for the patient, (2) Supporter of the calibration for eye tracking, and (3) Motivator.
Being an advocate for the patient is an inseparable part of the role of a nurse. In this study, as the advocate, the intermediaries accompanied the patients through the process, starting from the explanation of the study to the end of the experiment. The intermediaries paid attention to the patients’ needs and connected the patients with the remote operator and the system. Davoodvand et al. [
18] explained advocacy in two actions, namely: being in empathy with the patient and protecting the patient. Being in empathy includes understanding, feeling close with the patient, and being sympathetic with the patient, whereas the act of protecting the patient includes the protection of their rights, the completion of the care process, and prioritizing the patient’s health.
Furthermore, the intermediaries, in their role as persons who supported the calibration for eye tracking, assisted the remote operator in the calibration process, gave the instructions to the patients in completing the calibration, and helped to maintain the correct position of their heads until completing the calibration. The intermediaries’ role, as persons who supported the calibration for eye tracking, required the intermediaries’ competency and understanding of the system. This role reflects the technological competency needed by nurses in this technologically demanding care unit. Locsin [
19], in his
Technological Competency as Caring in Nursing, described that technological competency is the expression of caring. In a situation in which technologies are used for patient care, being technologically competent is being caring [
19].
There are some difficulties for people with mental illness in psychiatric long-term care in operating a new, advanced technology, i.e., a drone. Therefore, using the motivator as an intermediary, it was thought that it was important to motivate patients, so that they could meet new people and feel they were having fun by practicing and maneuvering the drone.
4.2. Experimental Phase
In the experimental phase, the intermediaries played the roles as: (1) Facilitator, (2) Empathizer to the patients, and (3) Evaluator of patient’s mental state and fatigue level. Overall, the roles of the intermediaries included the roles of advocate, persons who supported calibration for eye tracking, and the facilitators.
As a
facilitator, the intermediaries aided in the success of the whole process. When the video of the research explanation was shown to the patients, the intermediaries explained the video to the patients. During the experiment, when Mt. Fuji was seen, the intermediaries also explained the view of Mt. Fuji to the patients. The role of the facilitator highlights the intermediaries’ capability of professional communication, particularly in connecting the patient with the remote operator. Ghiyasvandian et al. [
20] described nurses’ roles as a facilitator in professional communication as the mediator of communication between patients and other healthcare providers and the executor of others’ duties related to patients’ care.
The
Empathizer to the patients helped as patients worked on new things, met new people through drones, and shared new experiences in places they had never seen before. In addition, an empathic understanding of sharing the emotions and joys of the patients was an important part of the study. Empathy is an important component of the nurse–patient relationship and nursing care [
21]. Successful nursing care can be achieved as nurses bring empathy to their patients.
The
evaluator of the patient’s mental state and fatigue level was the most important role. The role of nurses and medical staff as intermediaries in assessing the mental state and malaise of persons with mental illness and persons with disabilities was imperative. Evaluating patients’ physiological and psychological conditions are integral parts in the successful evaluation of patients [
22].
Furthermore, it was not easy for some older patients to focus and move their eyes in a controlled manner for a long time. Therefore, the drone operation by patients was conducted in a short time of around 5–7 min. In addition, for some older patients who found it difficult to control their eyes and head, the intermediary stayed with these patients during the experiment to help them concentrate and to hold their heads, with their permission, to prevent unnecessary head movement.
4.3. Implications for Practice
The future value and relevance of nursing and healthcare are enhanced through interventions associating the outside world among patients, involving advanced and sophisticated technologies, and human caring activities. In this study, this association was fostered by a remotely controlled drone system through which patients with limited access to the outside world, because of disease and other health care conditions such as mental health problems, were provided access and a source of enjoyment. The value of the environment as a metaparadigm of nursing [
23] is well-established, and nursing activities that foster human–environment and care–healing conditions are clearly desired. The ability of patients to “see the world” outside of the hospital setting can allow them to live their lives more meaningfully as human beings. By providing this opportunity to patients, nurses render a critical and valuable service as intermediaries in high-tech interventions such as those required in a remotely controlled drone system.
However, the future of high-tech healthcare also requires proficiency with technologies in healthcare. Nurses, as intermediaries, need to be adept with technological know-how, and they must be able to “troubleshoot” technology-based problems with sophisticated technologies in the healthcare arena. It behooves nurses to be technologically prepared to meet the future demand of nurse roboticists, informaticians, and engineers.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}