
Discrete Velocity Boltzmann Model for Quasi-Incompressible Hydrodynamics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Equilibrium for DV Boltzmann Kinetic Model and the Euler Equations
3. Navier–Stokes Equations
4. Spurious Invariants
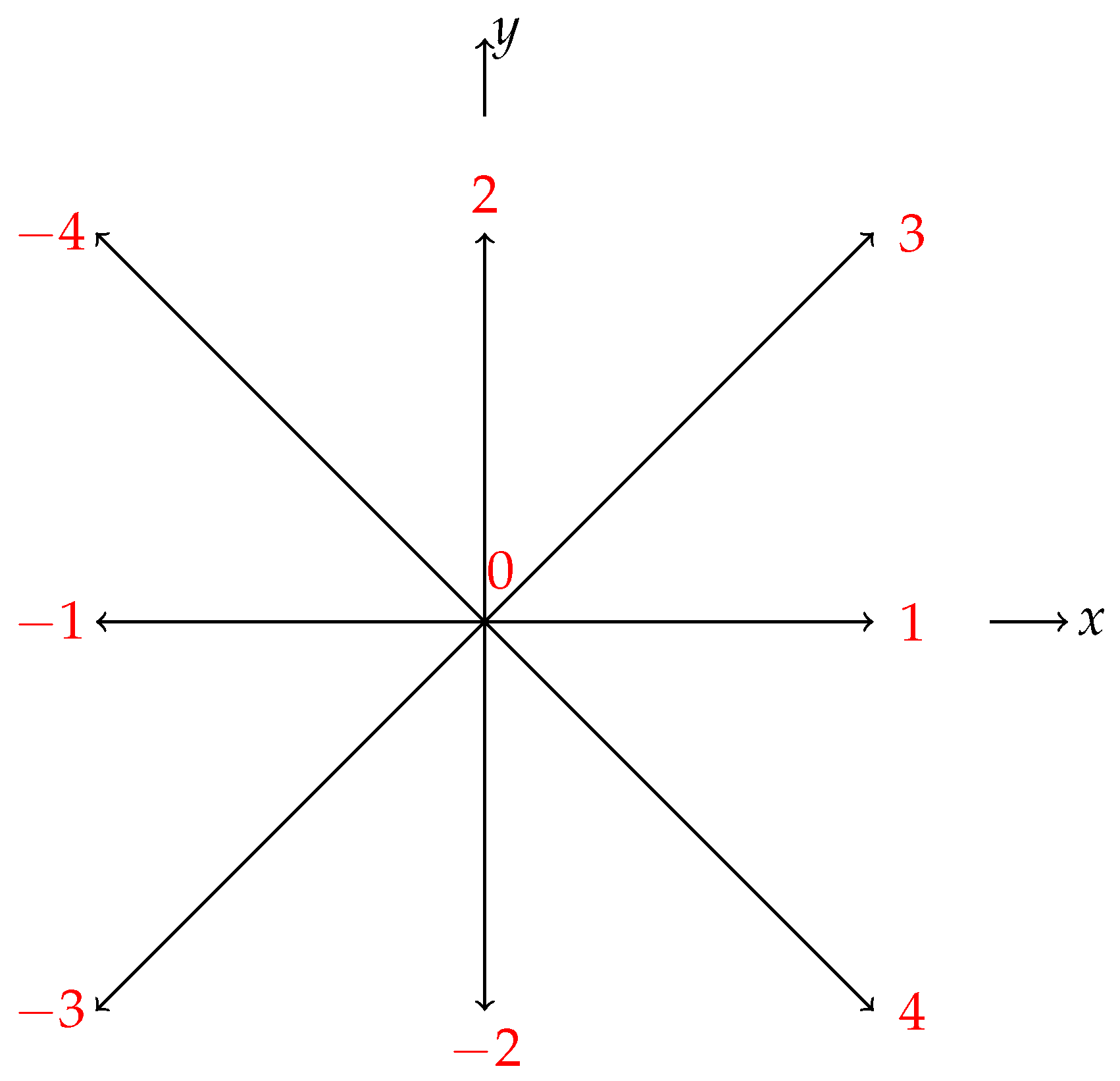
5. Nine Velocity DV Boltzmann Model for Lattice
- a.
- b.
- the collisions linking all three different energy states, they define transitions between the particle’s states with different kinetic energies, and evidently can not be excluded. We have four different reactions , , , . The corresponding contributions to the collision kernel are
- c.
- Broadwell type collision between the particles with the velocity magnitudes is defined by the reaction , the contributions to the collision kernel are
- d.
- the collisions between the particles with the velocity magnitudes and c, we have four different reactions , the contributions to the collision kernel are
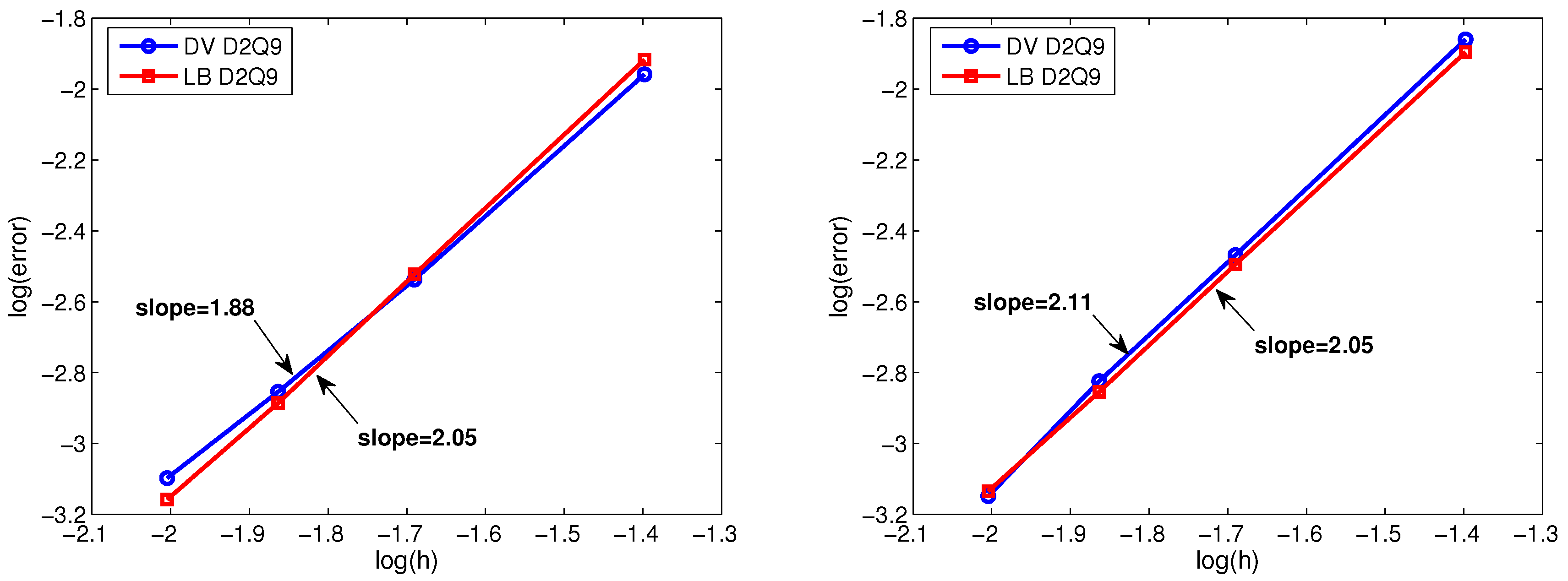
6. Numerical Implementation and Test Problems
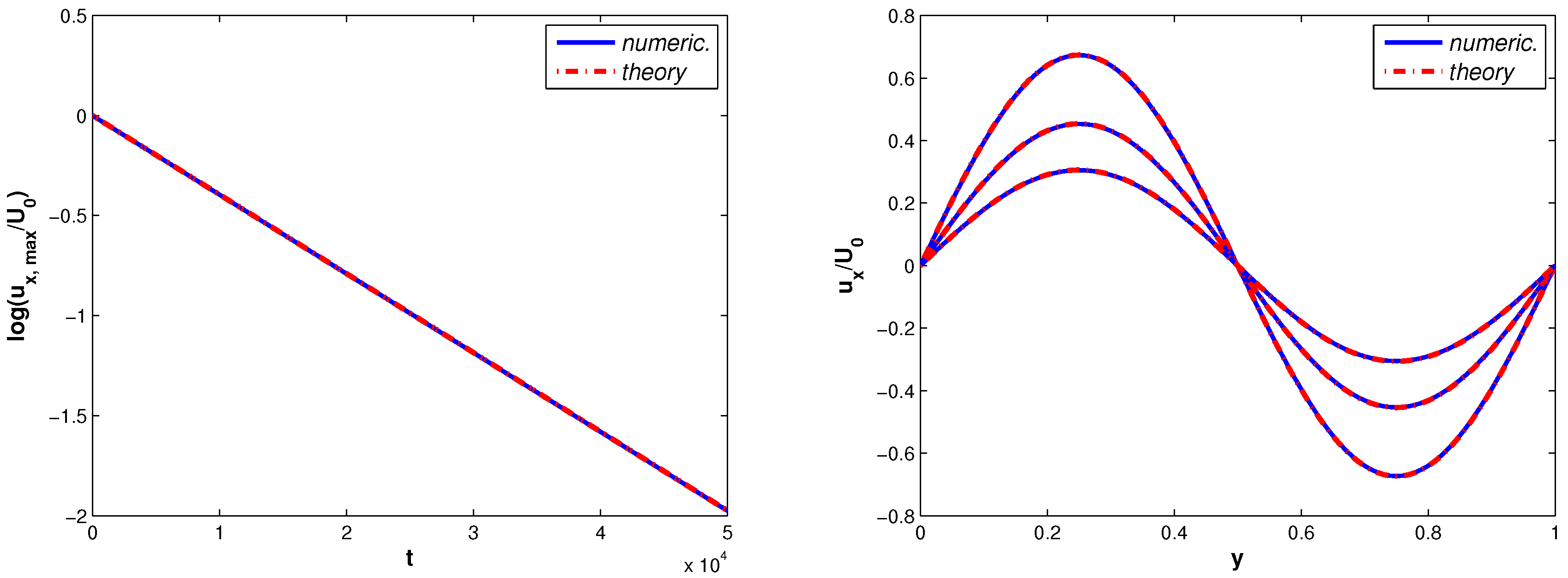
6.1. Shear Wave Decay
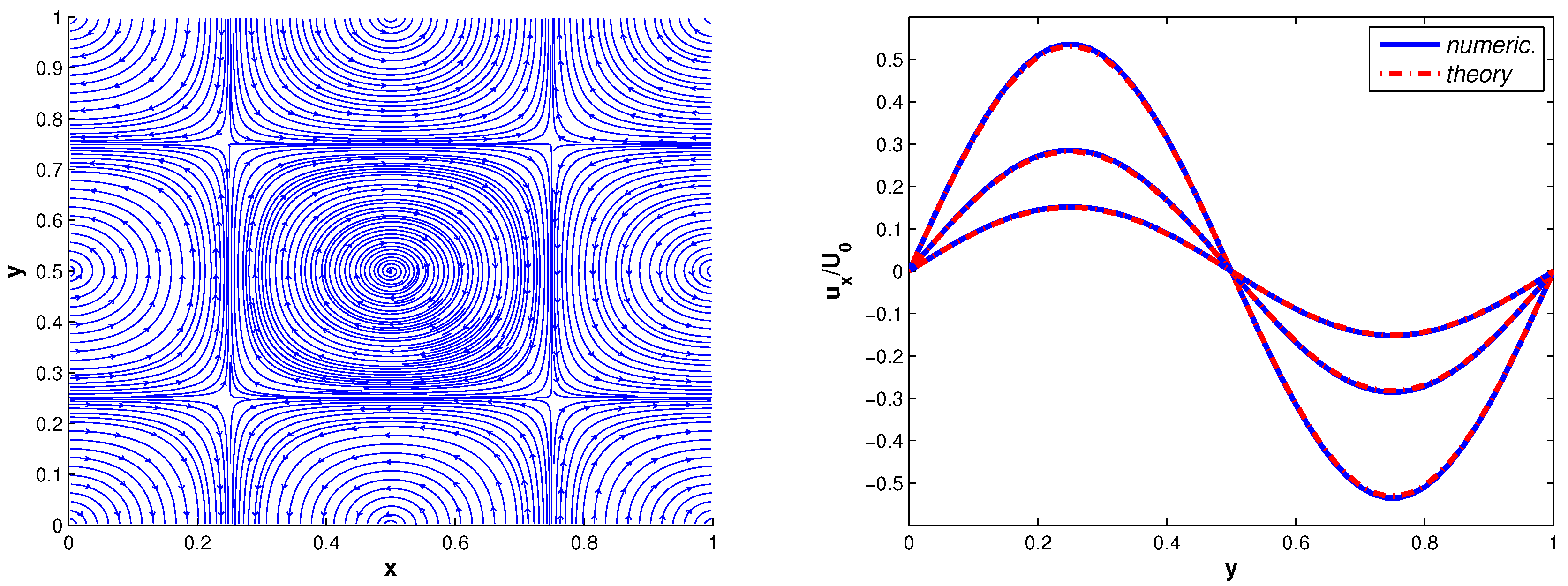
6.2. Taylor-Green Vortex
7. Results and Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DV | discrete velocity |
| LB | lattice Boltzmann |
References
- Kogan, M. Rarefied Gas Dynamics; Plenum Press: New York, NY, USA, 1969. [Google Scholar]
- Guo, Z.; Shu, C. Lattice Boltzmann Method and Its Applications in Engineering; World Scientific Publishing Company: Singapore, 2013. [Google Scholar]
- Krüger, T.; Kusumaatmaja, H.; Kuzmin, A.; Shardt, O.; Silva, G.; Viggen, E. The Lattice Boltzmann Method. Principles and Practice; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Succi, S. The Lattice Boltzmann Equation: For Complex States of Flowing Matter; OUP: Oxford, UK, 2018. [Google Scholar]
- Lallemand, P.; Luo, L.S.; Krafczyk, M.; Yong, W.A. The lattice Boltzmann method for nearly incompressible flows. J. Comput. Phys. 2020, 431, 109713. [Google Scholar] [CrossRef]
- Qian, Y.H.; d’Humières, D.; Lallemand, P. Lattice BGK models for Navier-Stokes equation. Europhys. Lett. 1992, 17, 479–484. [Google Scholar] [CrossRef]
- Toschi, F.; Succi, S. Lattice Boltzmann method at finite Knudsen numbers. Europhys. Lett. 2005, 69, 549. [Google Scholar] [CrossRef]
- Ansumali, S.; Karlin, I. Consistent Lattice Boltzmann Method. Phys. Rev. Lett. 2005, 95, 260605. [Google Scholar] [CrossRef]
- Shan, X.; Yuan, X.; Chen, H. Kinetic theory representation of hydrodynamics: A way beyond the Navier–Stokes equation. J. Fluid Mech. 2006, 550, 413–441. [Google Scholar] [CrossRef]
- Zhang, R.; Shan, X.; Chen, H. Efficient kinetic method for fluid simulation beyond the Navier-Stokes equation. Phys. Rev. E 2006, 74, 046703. [Google Scholar] [CrossRef]
- Ansumali, S.; Karlin, I.; Arcidiacono, S.; Abbas, A.; Prasianakis, N. Hydrodynamics beyond Navier-Stokes: Exact Solution to the Lattice Boltzmann Hierarchy. Phys. Rev. Lett. 2007, 98, 124502. [Google Scholar] [CrossRef]
- Niu, X.; Hyodo, S.; Munekata, T.; Suga, K. Kinetic lattice Boltzmann method for microscale gas flows: Issues on boundary condition, relaxation time, and regularization. Phys. Rev. E 2007, 76, 036711. [Google Scholar] [CrossRef]
- Kim, S.; Pitsch, H.; Boyd, I. Accuracy of higher-order lattice Boltzmann methods for microscale flows with finite Knudsen numbers. J. Comput. Phys. 2008, 227, 8655. [Google Scholar] [CrossRef]
- Tang, G.; Zhang, Y.; Emerson, D. Lattice Boltzmann models for nonequilibrium gas flows. Phys. Rev. E 2008, 77, 046701. [Google Scholar] [CrossRef]
- Meng, J.; Zhang, Y. Gauss-Hermite quadratures and accuracy of lattice Boltzmann models for non-equilibrium gas flows. Phys. Rev. E 2011, 83, 036704. [Google Scholar] [CrossRef]
- Suga, K. Lattice Boltzmann methods for complex micro-flows: Applicability and limitations for practical applications. Fluid Dyn. Res. 2013, 45, 034501. [Google Scholar] [CrossRef]
- Feuchter, C.; Schleifenbaum, W. High-order lattice Boltzmann models for wall-bounded flows at finite Knudsen numbers. Phys. Rev. E 2016, 94, 013304. [Google Scholar] [CrossRef]
- Ambruş, V.; Sofonea, V. Lattice Boltzmann models based on half-range Gauss–Hermite quadratures. J. Comp. Phys. 2016, 316, 760–788. [Google Scholar] [CrossRef]
- Ilyin, O. Gaussian Lattice Boltzmann method and its applications to rarefied flows. Phys. Fluids 2020, 32, 012007. [Google Scholar] [CrossRef]
- Wagner, A. An H-theorem for the lattice Boltzmann approach to hydrodynamics. Europhys. Lett. 1998, 44, 144–149. [Google Scholar] [CrossRef][Green Version]
- Yong, W.A.; Luo, L.S. Nonexistence of H theorems for the athermal lattice Boltzmann models with polynomial equilibria. Phys. Rev. E 2003, 67, 051105. [Google Scholar] [CrossRef]
- Yong, W.A.; Luo, L.S. Nonexistence of H Theorem for some Lattice Boltzmann models. J. Stat. Phys. 2005, 121, 91–103. [Google Scholar] [CrossRef]
- Karlin, I.; Ferrante, A.; Öttinger, H. Perfect entropy functions of the Lattice Boltzmann method. Europhys. Lett. 1999, 47, 182–188. [Google Scholar] [CrossRef]
- Ansumali, S.; Karlin, I.; Öttinger, H. Minimal entropic kinetic models for hydrodynamics. Europhys. Lett. 2003, 63, 798–804. [Google Scholar] [CrossRef]
- Karlin, I.; Ansumali, S.; Frouzakis, C.; Chikatamarla, S. Elements of the Lattice Boltzmann Method I: Linear Advection Equation. Commun. Comput. Phys. 2006, 1, 616–655. [Google Scholar]
- Karlin, I.; Chikatamarla, S.; Ansumali, S. Elements of the lattice Boltzmann method II: Kinetics and hydrodynamics in one dimension. Commun. Comput. Phys. 2007, 2, 196–238. [Google Scholar]
- Broadwell, J. Shock structure in a simple discrete velocity gas. Phys. Fluids 1964, 7, 1243–1247. [Google Scholar] [CrossRef]
- Godunov, S.; Sultangazin, U. On discrete models of the kinetic Boltzmann equation. Russ. Math. Surv. 1971, 26, 1–56. [Google Scholar] [CrossRef]
- Gatignol, R. The hydrodynamical description for a discrete velocity model of gas. Complex Syst. 1987, 1, 709–725. [Google Scholar]
- Platkowski, T.; Illner, R. Discrete velocity models of the Boltzmann equation: A survey on the mathematical aspects of the theory. SIAM Rev. 1988, 30, 213–255. [Google Scholar] [CrossRef]
- Bobylev, A.; Spiga, G. On a class of exact two-dimensional stationary solutions for the Broadwell model of the Boltzmann equation. J. Phys. A Math. Gen. 1994, 27, 7451–7459. [Google Scholar] [CrossRef]
- Bobylev, A. Exact solutions of discrete kinetic models and stationary problems for the plane Broadwell model. Math. Methods Appl. Sci. 1996, 19, 825–845. [Google Scholar] [CrossRef][Green Version]
- Bobylev, A.; Toscani, G. Two dimensional half-space problems for the Broadwell discrete velocity model. Contin. Mech. Termodyn. 1996, 8, 257–274. [Google Scholar] [CrossRef]
- Bobylev, A.; Caraffini, G.; Spiga, G. Non-stationary two-dimensional potential flows by the Broadwell model equations. Eur. J. Mech. B Fluids 2000, 19, 303–315. [Google Scholar] [CrossRef]
- Ilyin, O. The analytical solutions of 2D stationary Broadwell kinetic model. J. Stat. Phys. 2012, 146, 67–72. [Google Scholar] [CrossRef]
- Ilyin, O. Symmetries, the current function, and exact solutions for Broadwell’s two-dimensional stationary kinetic model. Theor. Math. Phys. 2014, 179, 679–688. [Google Scholar] [CrossRef]
- Chen, H.; Goldhirsch, I.; Orszag, S. Discrete rotational symmetry, moment isotropy, and higher order lattice Boltzmann models. J. Sci. Comput. 2008, 34, 87–112. [Google Scholar] [CrossRef]
- Uchiyama, K. On the Boltzmann-Grad limit for the Broadwell model of the Boltzmann equation. J. Stat. Phys. 1988, 52, 331–355. [Google Scholar] [CrossRef]
- Bobylev, A.; Cercignani, C. Discrete velocity models without nonphysical invariants. J. Stat. Phys. 1999, 97, 677–686. [Google Scholar] [CrossRef]
- Bobylev, A.; Vinerean, M. Construction of discrete kinetic models with given invariants. J. Stat. Phys. 2008, 132, 153–170. [Google Scholar] [CrossRef]
- Vinerean, M.; Windfäll, Å.; Bobylev, A. Construction of normal discrete velocity models of the Boltzmann equation. Nuovo Cim. 2010, 33, 257–264. [Google Scholar]
- Bernhoff, N.; Vinerean, M. Discrete velocity models for mixtures without nonphysical collision invariants. J. Stat. Phys. 2016, 165, 434–453. [Google Scholar] [CrossRef]
- Chauvat, P.; Gatignol, R. Euler and Navier-Stokes description for a class of discrete models of gases with different moduli. Transp. Theory Stat. Phys. 1992, 21, 417–435. [Google Scholar] [CrossRef]
- Vedenyapin, V.; Orlov, Y. Conservation laws for polynomial Hamiltonians and for discrete models of the Boltzmann equation. Theor. Math. Phys. 1999, 121, 1516–1523. [Google Scholar] [CrossRef]
- Vedenyapin, V. Velocity inductive construction for mixtures. Transp. Theor. Stat. Phys. 1999, 28, 727–742. [Google Scholar] [CrossRef]
- Babovsky, H. “Small” kinetic models for transitional flow simulations. AIP Conf. Proc. 2012, 1501, 272–278. [Google Scholar]
- Babovsky, H. Discrete kinetic models in the fluid dynamic limit. Comput. Math. with Appl. 2014, 67, 256–271. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ilyin, O. Discrete Velocity Boltzmann Model for Quasi-Incompressible Hydrodynamics. Mathematics 2021, 9, 993. https://doi.org/10.3390/math9090993
Ilyin O. Discrete Velocity Boltzmann Model for Quasi-Incompressible Hydrodynamics. Mathematics. 2021; 9(9):993. https://doi.org/10.3390/math9090993
Chicago/Turabian StyleIlyin, Oleg. 2021. "Discrete Velocity Boltzmann Model for Quasi-Incompressible Hydrodynamics" Mathematics 9, no. 9: 993. https://doi.org/10.3390/math9090993
APA StyleIlyin, O. (2021). Discrete Velocity Boltzmann Model for Quasi-Incompressible Hydrodynamics. Mathematics, 9(9), 993. https://doi.org/10.3390/math9090993