
An Enhanced DC-Link Voltage Response for Wind-Driven Doubly Fed Induction Generator Using Adaptive Fuzzy Extended State Observer and Sliding Mode Control




Abstract
:1. Introduction
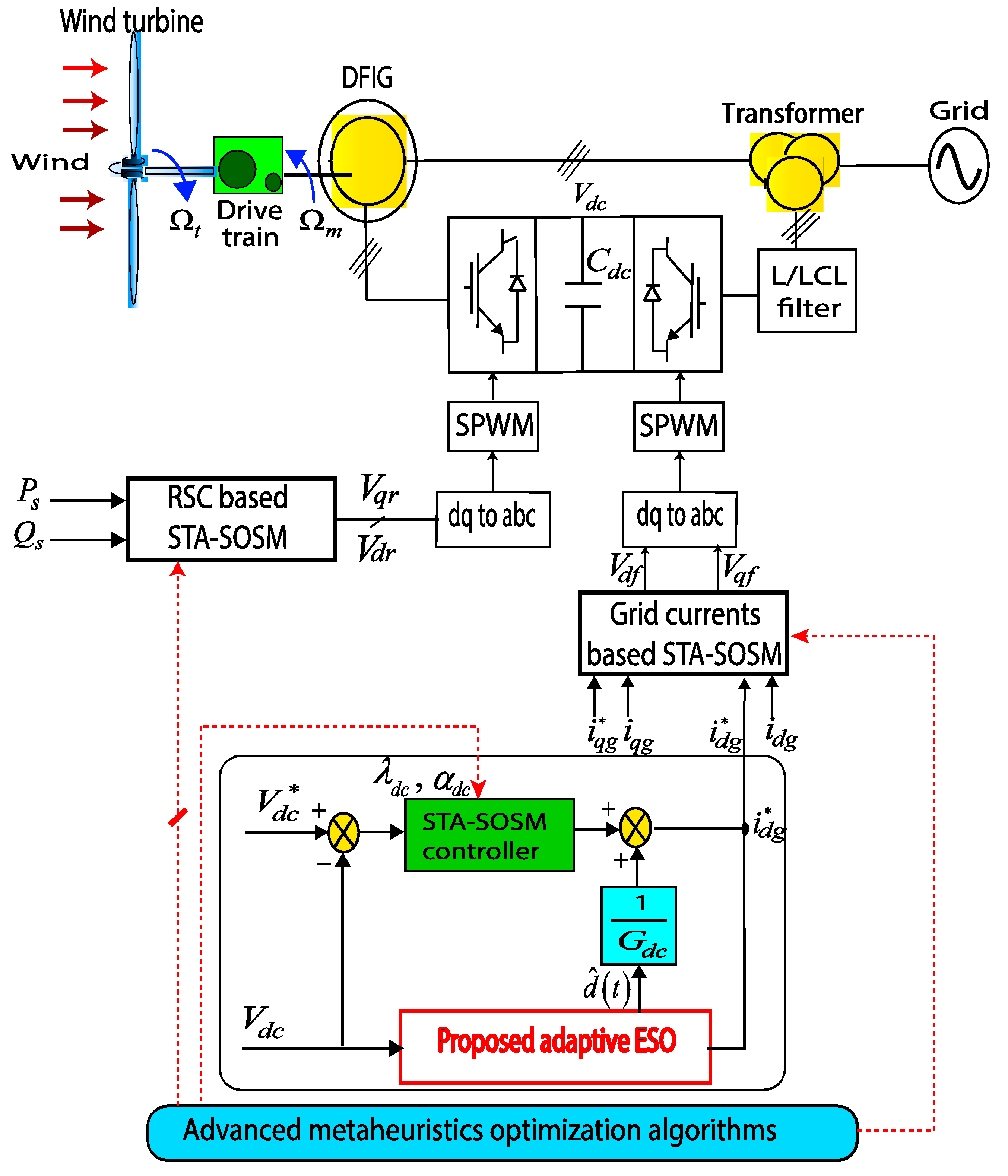
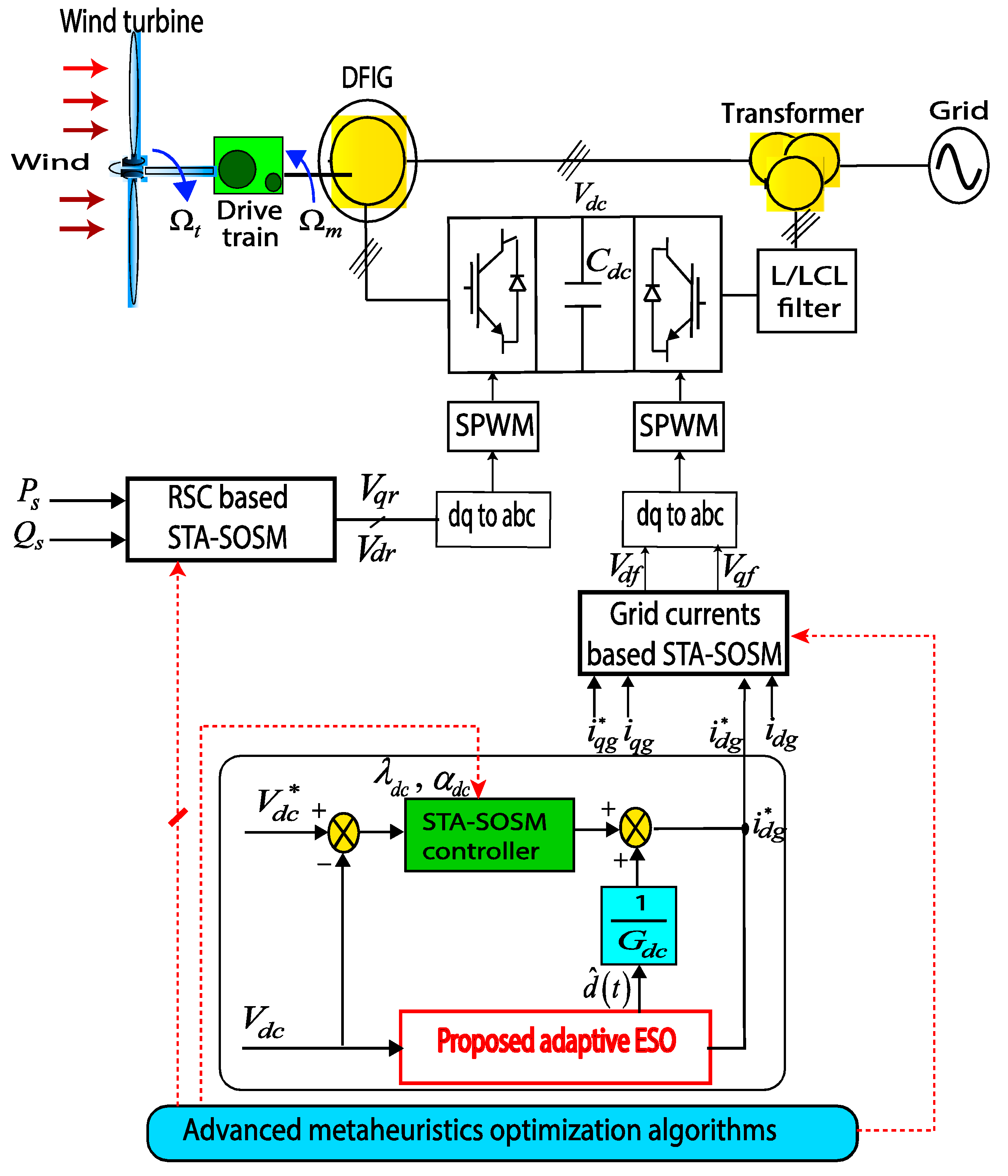
2. Modeling of the DFIG Based Wind Energy Converter
3. Design of Second-Order Sliding Mode Controller
3.1. Controller Design
3.2. Operational Constraints
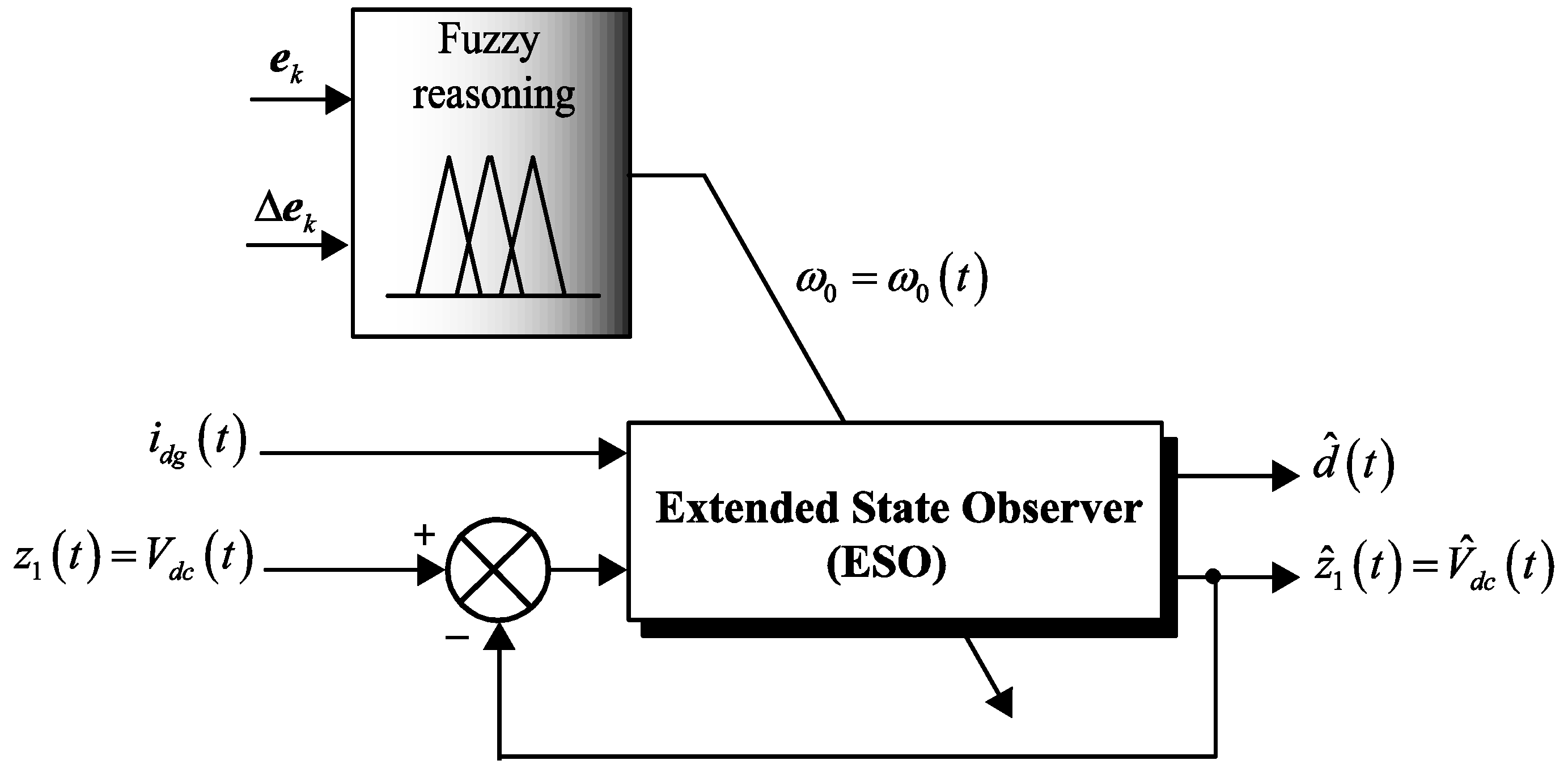
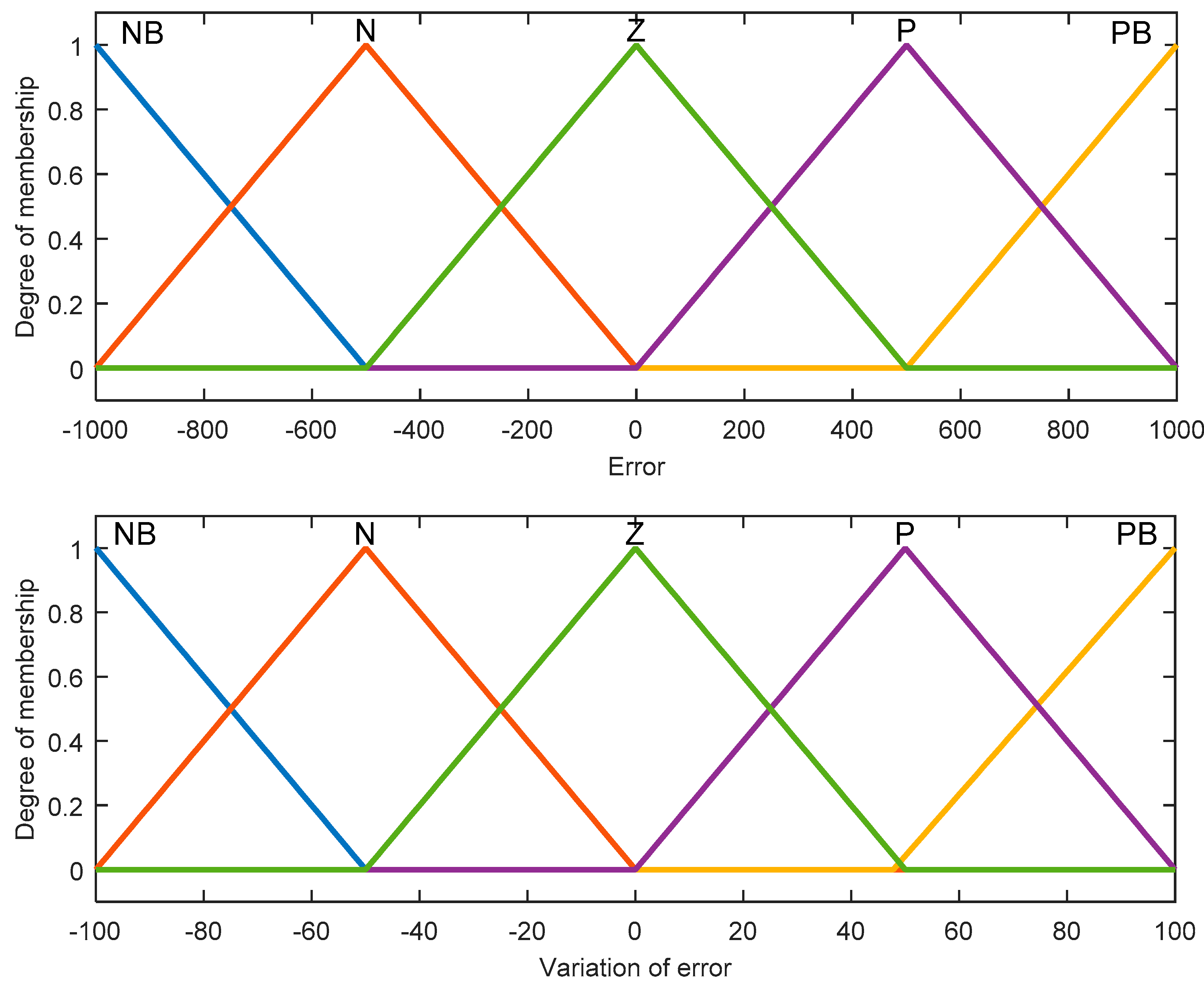
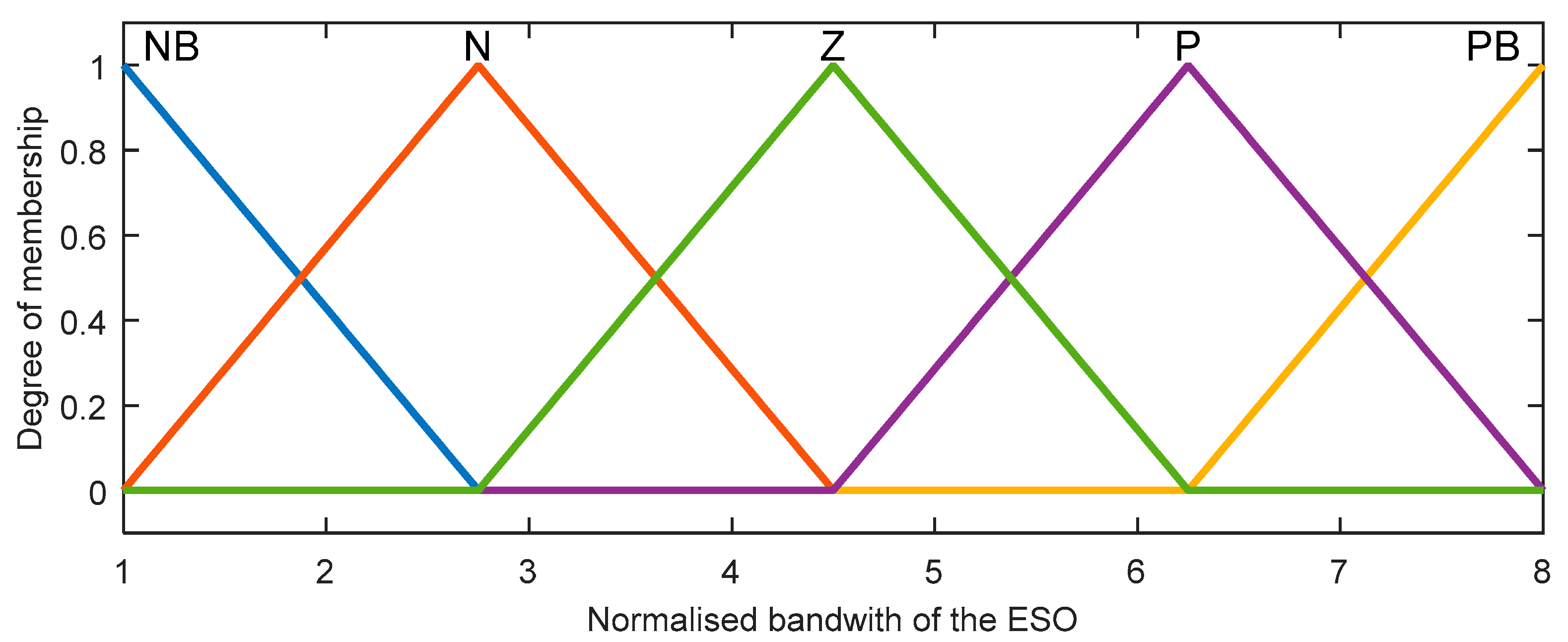
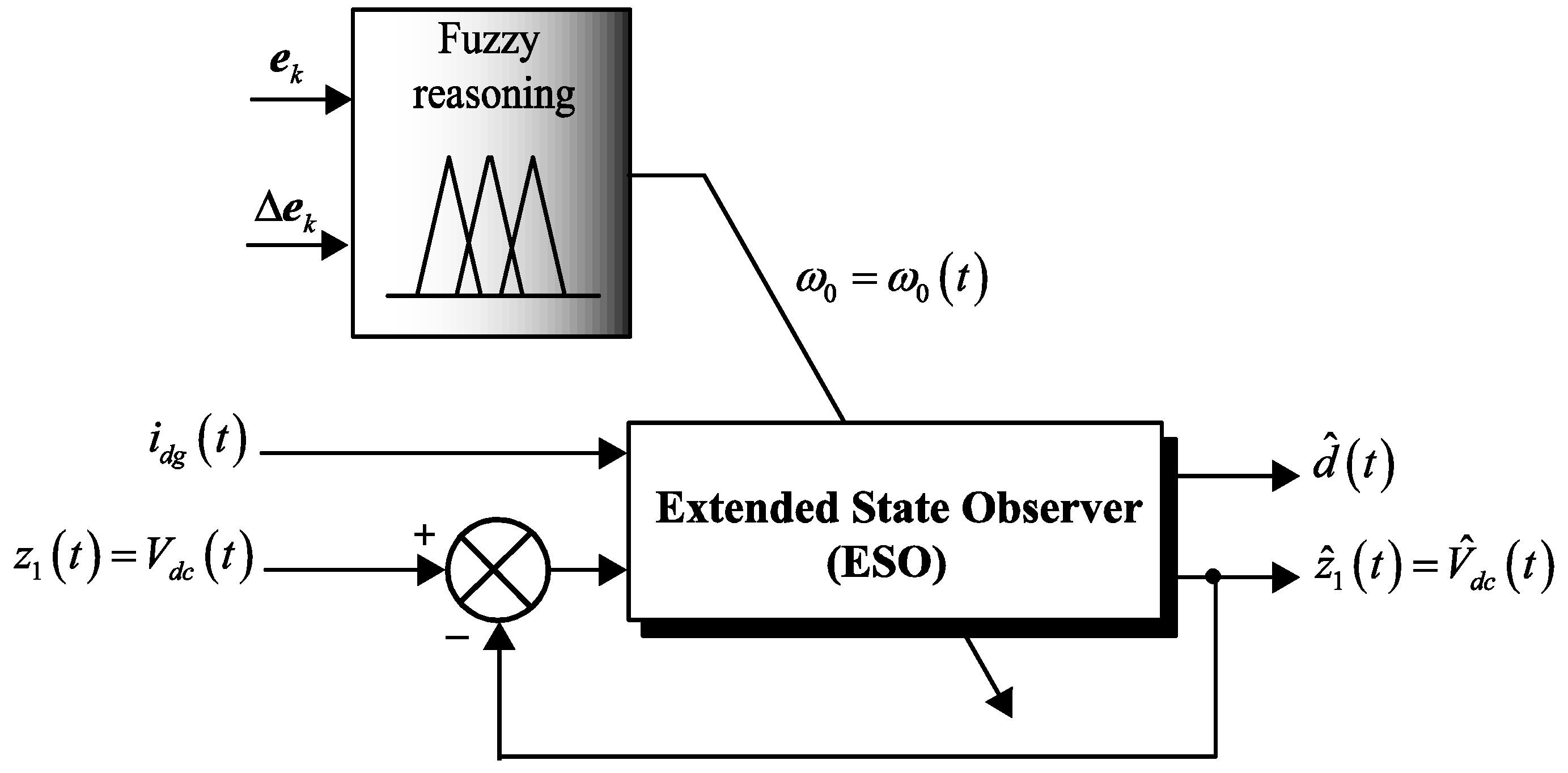
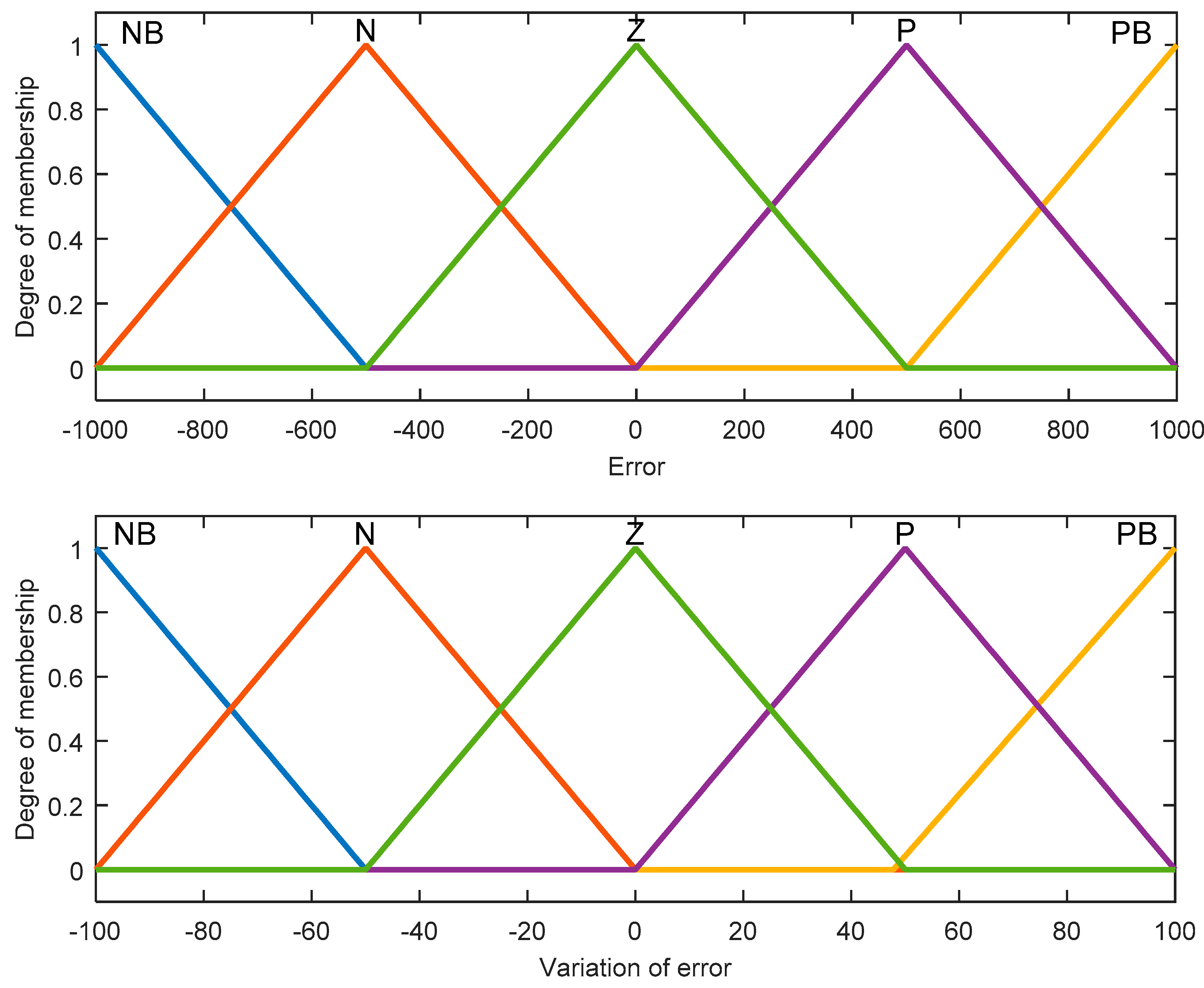
4. Adaptive Fuzzy ESO-Based Sliding Mode Controller
4.1. Concept of Extended State Observers
4.2. Extended State Observer for the DC-Link Voltage Loop
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khaligh, A.; Onar, O.C. Energy Harvesting Solar, Wind, and Ocean Energy Conversion Systems, 1st ed.; CRC Press, Taylor & Francis Group: New York, NY, USA, 2009. [Google Scholar]
- Ahsan, H.; Mufti, M.D. Systematic development and application of a fuzzy logic equipped generic energy storage system for dynamic stability reinforcement. Int. J. Energy Res. 2020, 44, 8974–8987. [Google Scholar] [CrossRef]
- Alhato, M.M.; Bouallègue, S. Direct power control optimization for doubly fed induction generator based wind turbine systems. Math. Comput. Appl. 2019, 24, 77. [Google Scholar] [CrossRef] [Green Version]
- Naika, K.A.; Gupta, C.P.; Fernandez, E. Design and implementation of interval type-2 fuzzy logic-PI based adaptive controller for DFIG based wind energy system. Int. J. Electr. Power Energy Syst. 2020, 115, 105468. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.; Asher, G. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231. [Google Scholar] [CrossRef] [Green Version]
- Gagra, S.K.; Mishra, S.; Sing, M. Performance analysis of grid integrated doubly fed induction generator for a small hydro-power plant. Int. J. Renew. Energy Res. 2018, 8, 2310–2323. [Google Scholar]
- Djilali, L.; Sanchez, E.N.; Belkheiri, M. Real-time implementation of sliding-mode field-oriented control for a DFIG-based wind turbine. Int. Trans. Electr. Energy Syst. 2018, 28, e2539. [Google Scholar] [CrossRef]
- Merabet, A.; Eshaft, H.; Tanvir, A.A. Power-current controller based sliding mode control for DFIG-wind energy conversion system. IET Renew. Power Gener. 2018, 12, 1155–1163. [Google Scholar] [CrossRef]
- Barambones, O.; Cortajarena, J.A.; Alkorta, P.; De Durana, J.M.G. A Real-Time Sliding Mode Control for a Wind Energy System Based on a Doubly Fed Induction Generator. Energies 2014, 7, 6412–6433. [Google Scholar] [CrossRef]
- Xiong, L.; Li, P.; Li, H.; Wang, J. Sliding Mode Control of DFIG Wind Turbines with a Fast Exponential Reaching Law. Energies 2017, 10, 1788. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.-C.; Nguyen, T.H.; Lee, D.-C.; Lee, K.-B.; Kim, J.-M. Fault Tolerant Control of DC-Link Voltage Sensor for Three-Phase AC/DC/AC PWM Converters. J. Power Electron. 2014, 14, 695–703. [Google Scholar] [CrossRef] [Green Version]
- Merai, M.; Naouar, M.W.; Slama-Belkhodja, I.; Monmasson, E. An improved dc-link voltage control for a three-phase PWM rectifier using an adaptive PI controller combined with load current estimation. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–10. [Google Scholar]
- Lu, J.; Golestan, S.; Savaghebi, M.; Vasquez, J.C.; Guerrero, J.M.; Marzabal, A. An Enhanced State Observer for DC-Link Voltage Control of Three-Phase AC/DC Converters. IEEE Trans. Power Electron. 2018, 33, 936–942. [Google Scholar] [CrossRef] [Green Version]
- Song, G.; Cao, B.; Chang, L.; Shao, R.; Xu, S. A Novel DC-Link Voltage Control for Small-Scale Grid-Connected Wind Energy Conversion System. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 2461–2466. [Google Scholar]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended State Observer-Based Sliding-Mode Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2016, 64, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Blasko, V.; Kaura, V. A new mathematical model and control of a three-phase AC-DC voltage source converter. IEEE Trans. Power Electron. 1997, 12, 116–123. [Google Scholar] [CrossRef]
- Alhato, M.M.; Bouallègue, S. Thermal exchange optimization based control of a doubly fed induction generator in wind en-ergy conversion system. Indones. J. Electr. Eng. Comput. Sci. 2020, 20, 1–8. [Google Scholar]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm—A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110, 151–166. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Diab, A.A.Z.; Rezk, H. Partial shading mitigation of PV systems via different meta-heuristic techniques. Renew. Energy 2019, 130, 1159–1175. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 276, 66–72. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper Optimisation Algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Geem, Z.W.; Kim, J.H.; Loganathan, G. A New Heuristic Optimization Algorithm: Harmony Search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Alhato, M.M.; Bouallègue, S. Whale optimization algorithm for active damping of LCL-filter-based grid-connected converters. Int. J. Renew. Energy Res. 2019, 9, 986–996. [Google Scholar]
- Alhato, M.M.; Bouallègue, S.; Rezk, H. Modeling and Performance Improvement of Direct Power Control of Doubly-Fed Induction Generator Based Wind Turbine through Second-Order Sliding Mode Control Approach. Mathematics 2020, 8, 2012. [Google Scholar] [CrossRef]
- Matas, J.; Castilla, M.; Guerrero, J.M.; De Vicuna, L.G.; Miret, J. Feedback Linearization Of Direct-Drive Synchronous Wind-Turbines Via a Sliding Mode Approach. IEEE Trans. Power Electron. 2008, 23, 1093–1103. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Moreno, J.A.; Plestan, F.; Fridman, L.M.; Poznyak, A.S. Super-twisting adaptive sliding mode control: A Lyapunov design. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010; pp. 5109–5113. [Google Scholar]
- Liu, X.; Han, Y.; Wang, C. Second-order sliding mode control for power optimization of DFIG-based variable speed wind turbine. IET Renew. Power Gener. 2017, 11, 408–418. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Zheng, Q.; Gao, L.Q.; Gao, L. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3501–3506. [Google Scholar]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Zhao, Z.-Y.; Tomizuka, M.; Isaka, S. Fuzzy gain scheduling of PID controllers. IEEE Trans. Syst. Man Cybern. 1993, 23, 1392–1398. [Google Scholar] [CrossRef] [Green Version]
- Blanchett, T.; Kember, G.; Dubay, R. PID gain scheduling using fuzzy logic. ISA Trans. 2000, 39, 317–325. [Google Scholar] [CrossRef]
- Zhou, D.; Blaabjerg, F. Bandwidth oriented proportional-integral controller design for back-to-back power converters in DFIG wind turbine system. IET Renew. Power Gener. 2017, 11, 941–951. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | N | ZE | P | PB | ||
|---|---|---|---|---|---|---|
| NB | NB | NB | NB | N | ZE | |
| N | NB | N | N | N | ZE | |
| ZE | NB | N | ZE | P | PB | |
| P | ZE | P | P | P | PB | |
| PB | ZE | P | PB | PB | PB | |
| Performance Criteria | STA-SOSM Controllers’ Gains | |
|---|---|---|
| IAE | 26.10 | 14.50 |
| ISE | 17.40 | 93.60 |
| ITAE | 1.90 | 90.50 |
| ITSE | 12.30 | 53.90 |
| Control Strategies | Unit Step Change Response | |||
|---|---|---|---|---|
| TEO-tuned PI controller | 0.005 | 4.019 | 2.54 | 0.253 |
| TEO-tuned STA-SOSM controller | 0.004 | 4.012 | 2.95 | 0.246 |
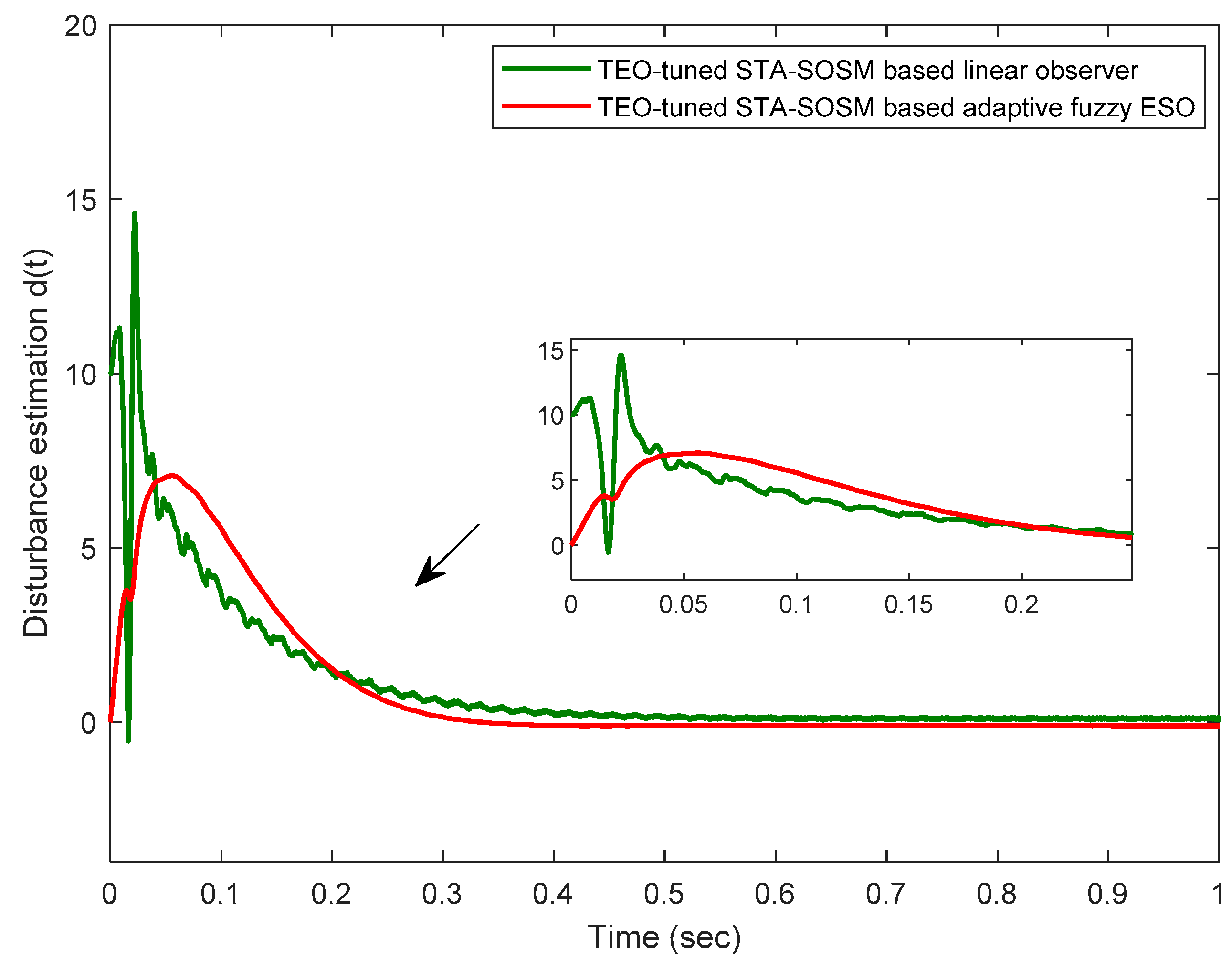
| STA-SOSM controller-based linear observer | 0.002 | 4.006 | 2.38 | 0.115 |
| STA-SOSM controller-based adaptive fuzzy ESO | 0.002 | 4.005 | 1.81 | 0.086 |
| Control Strategies | THD (%) | |
|---|---|---|
| Stator Current | Rotor Current | |
| TEO-tuned PI controller | 0.77 | 0.85 |
| TEO-tuned STA-SOSM controller | 0.28 | 0.32 |
| STA-SOSM controller-based linear observer | 0.27 | 0.30 |
| STA-SOSM controller-based adaptive fuzzy ESO | 0.26 | 0.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhato, M.M.; Ibrahim, M.N.; Rezk, H.; Bouallègue, S. An Enhanced DC-Link Voltage Response for Wind-Driven Doubly Fed Induction Generator Using Adaptive Fuzzy Extended State Observer and Sliding Mode Control. Mathematics 2021, 9, 963. https://doi.org/10.3390/math9090963
Alhato MM, Ibrahim MN, Rezk H, Bouallègue S. An Enhanced DC-Link Voltage Response for Wind-Driven Doubly Fed Induction Generator Using Adaptive Fuzzy Extended State Observer and Sliding Mode Control. Mathematics. 2021; 9(9):963. https://doi.org/10.3390/math9090963
Chicago/Turabian StyleAlhato, Mohammed Mazen, Mohamed N. Ibrahim, Hegazy Rezk, and Soufiene Bouallègue. 2021. "An Enhanced DC-Link Voltage Response for Wind-Driven Doubly Fed Induction Generator Using Adaptive Fuzzy Extended State Observer and Sliding Mode Control" Mathematics 9, no. 9: 963. https://doi.org/10.3390/math9090963
APA StyleAlhato, M. M., Ibrahim, M. N., Rezk, H., & Bouallègue, S. (2021). An Enhanced DC-Link Voltage Response for Wind-Driven Doubly Fed Induction Generator Using Adaptive Fuzzy Extended State Observer and Sliding Mode Control. Mathematics, 9(9), 963. https://doi.org/10.3390/math9090963