
Hybrid Gravitational–Firefly Algorithm-Based Load Frequency Control for Hydrothermal Two-Area System

 , , ,
, , ,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- To control the system load frequency.
- To control the tie-line power of the interconnected area.
- To ensure the economical operation of the power system, including the generation system.
- A new hybrid gravitational–firefly algorithm (hGFA), based on the gravitational search algorithm (GSA) and the firefly algorithm (FA), is proposed.
- A new methodology for adjusting the PI parameters to improve hGFA performance is proposed by the specific design of the hGFA for the two-area interconnected HTPS.
- Furthermore, the overall performance of the hGFA is compared with other well-known optimization techniques, such as the genetic algorithm (GA), particle swarm optimization (PSO), GSA, and FA using the ITAE as an objective function in different case studies. Furthermore, it is noted that, for the same computation time, the overshoot and settling time values of the load frequency, as well as tie-line power, are reduced significantly in each case study with the proposed algorithm.
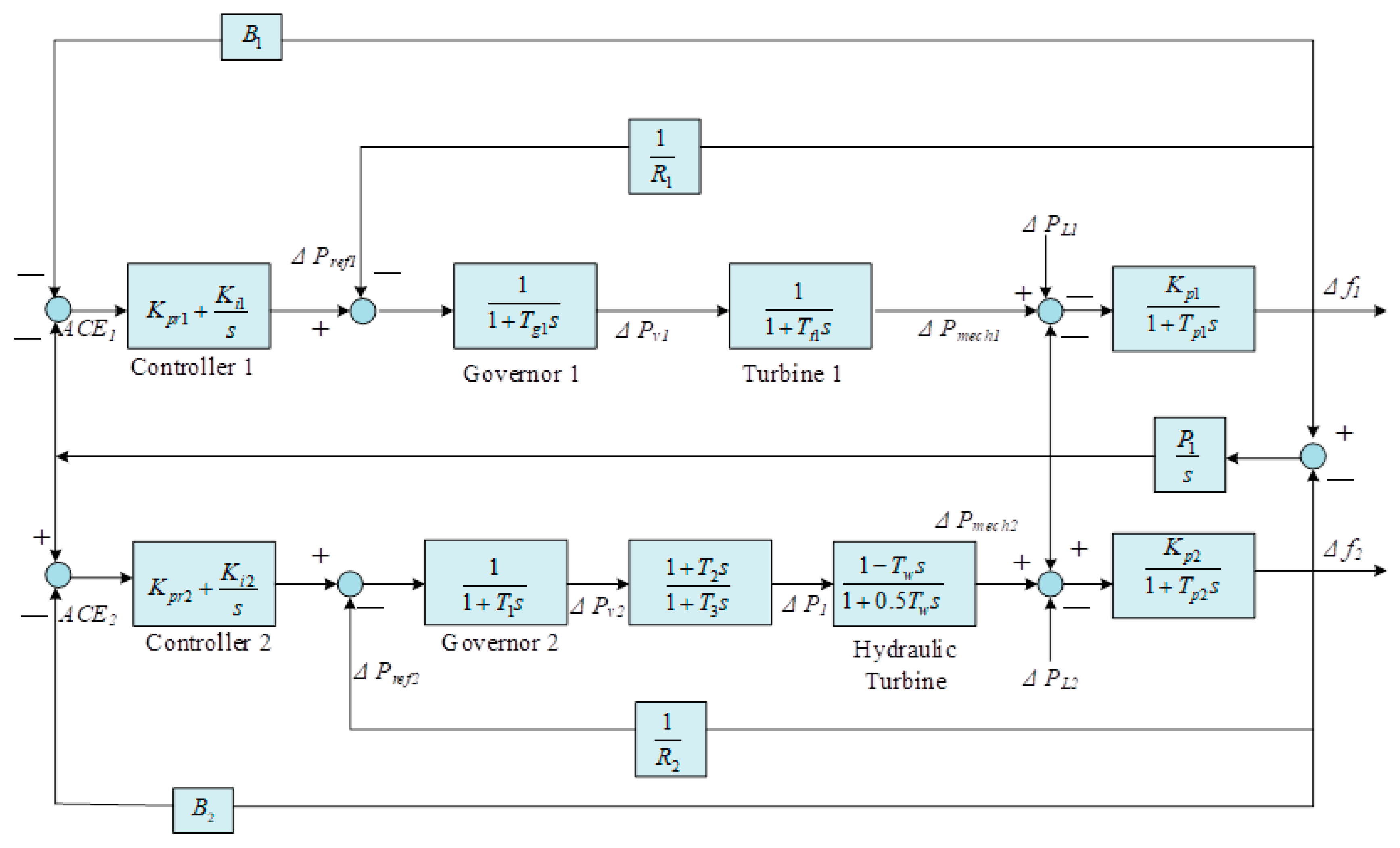
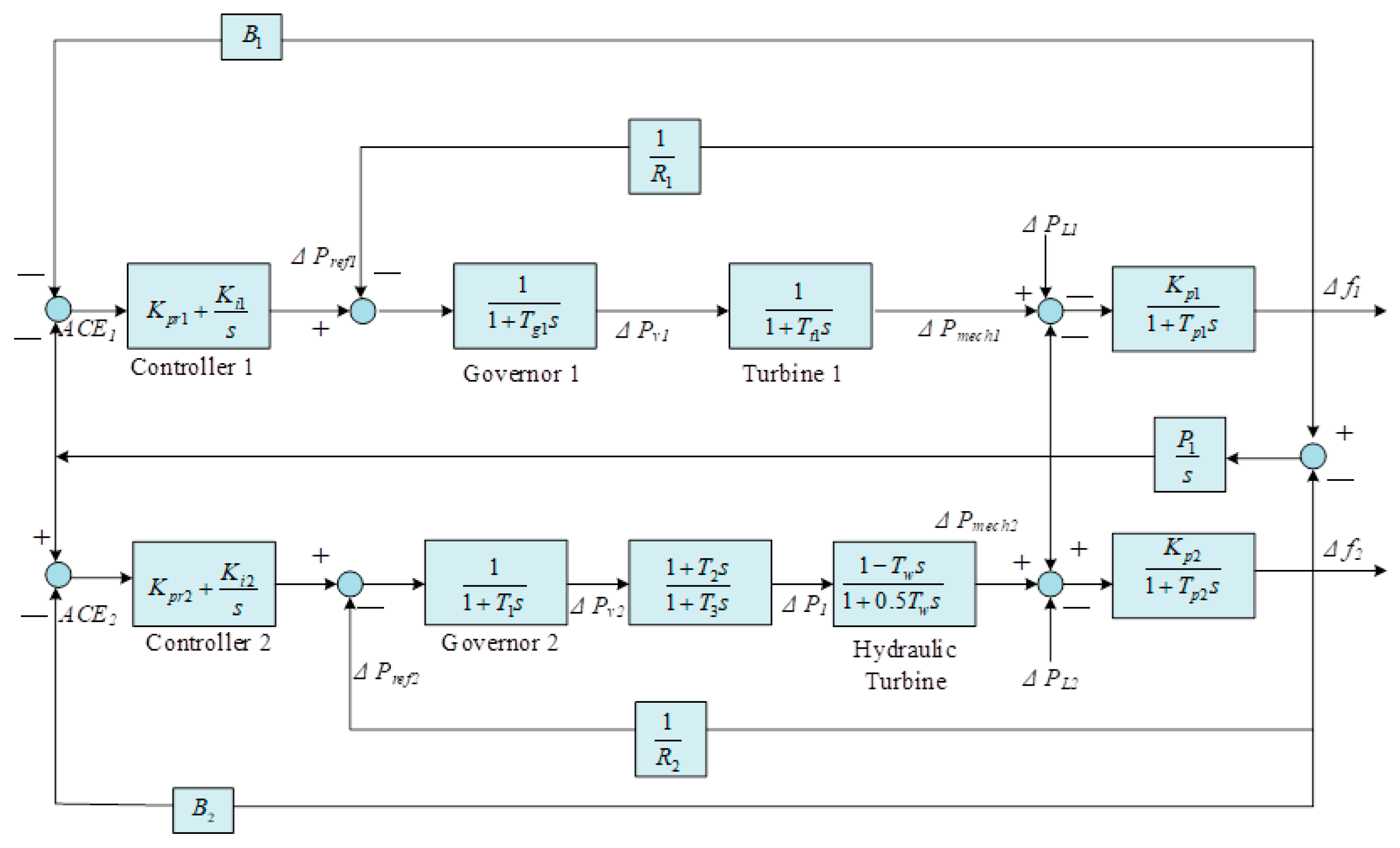
2. State Space Modeling of a Hydrothermal System
2.1. The Proportional Plus Integral Controller
2.2. Test Model for the Two-Area Hydrothermal System
2.3. State Space Modeling
3. Hybrid Gravitational–Firefly Algorithm
3.1. GSA
3.2. Firefly Algorithm
4. Methodology and Simulation Results
4.1. Simulation Methodology
4.2. Simulation Results
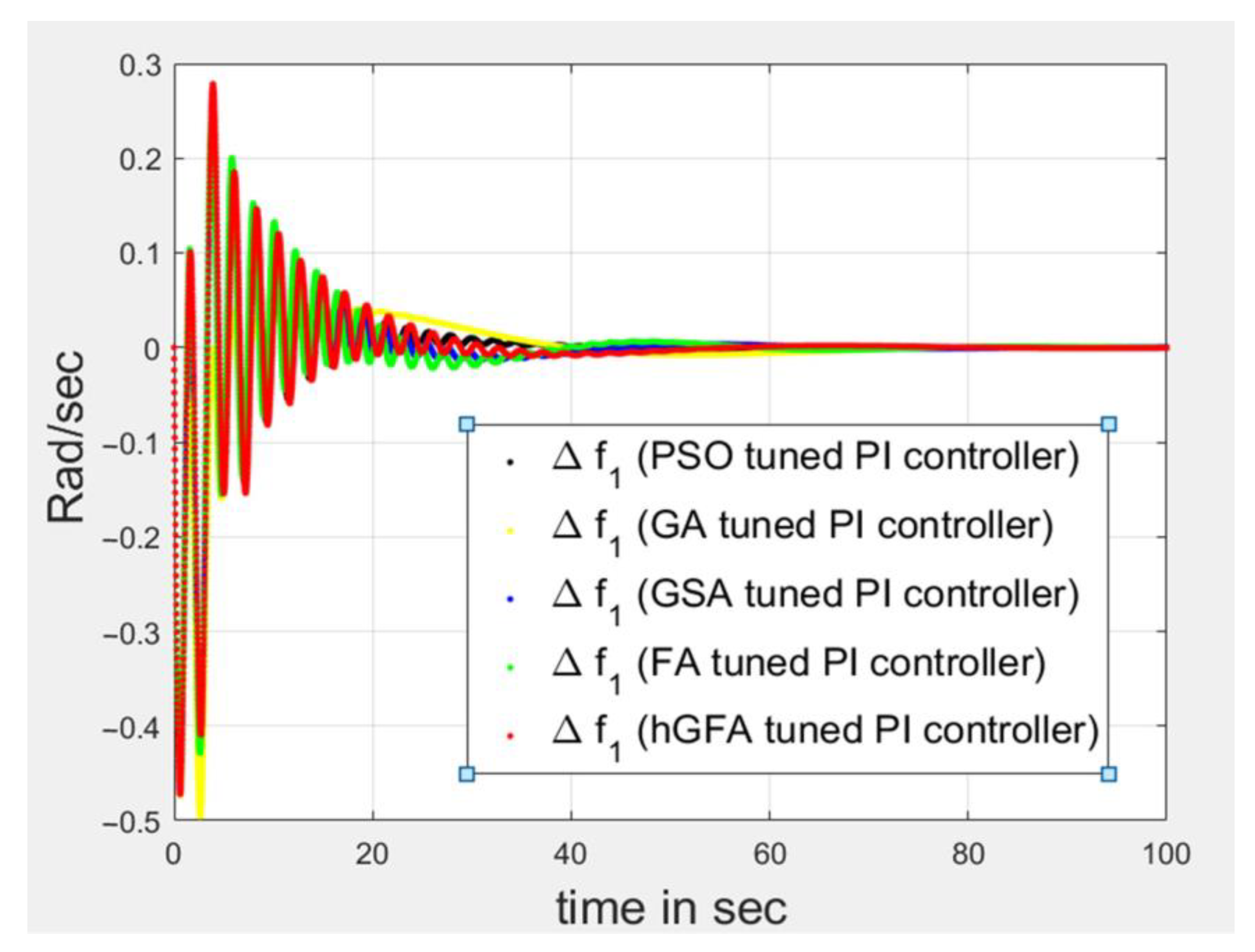
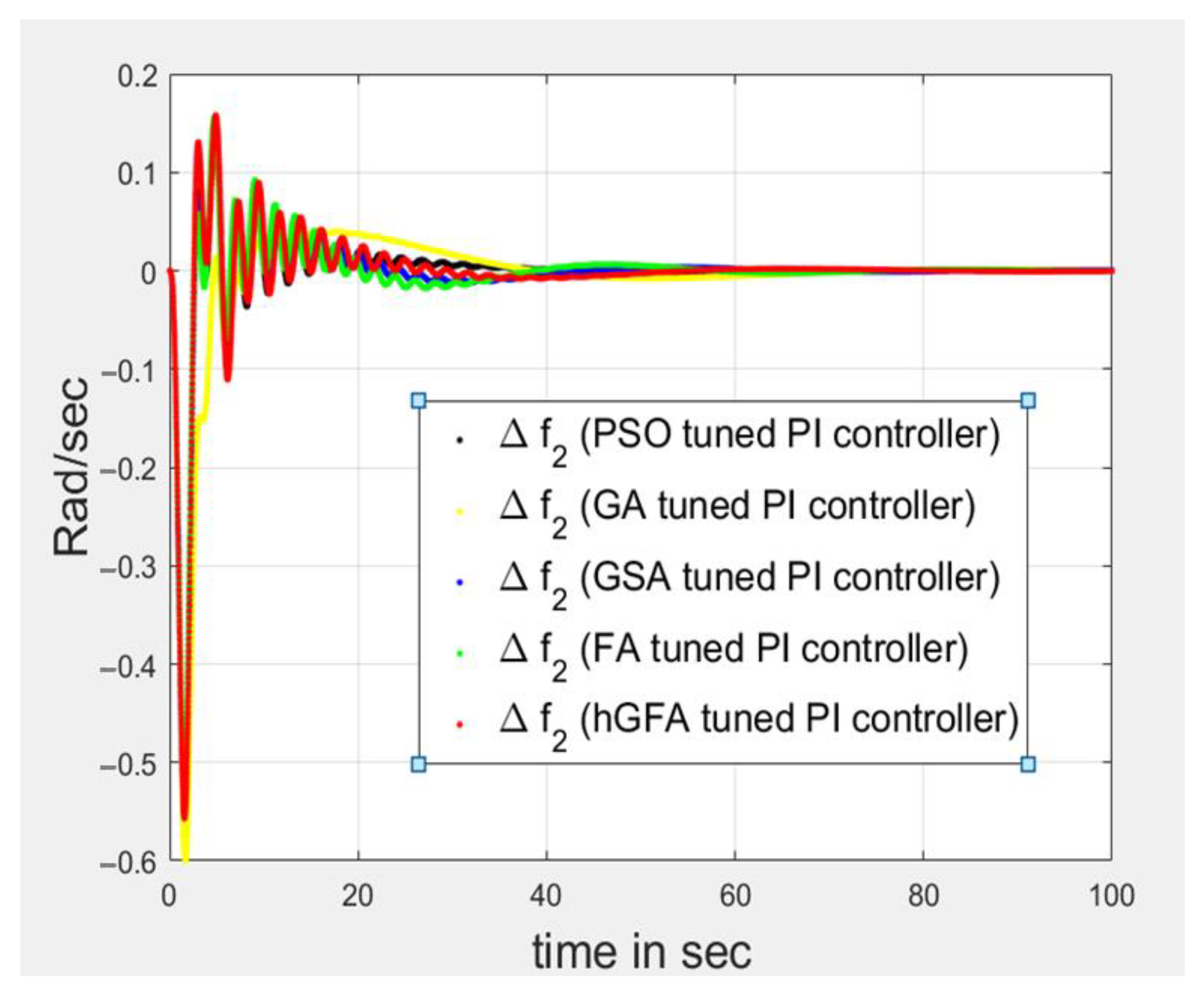
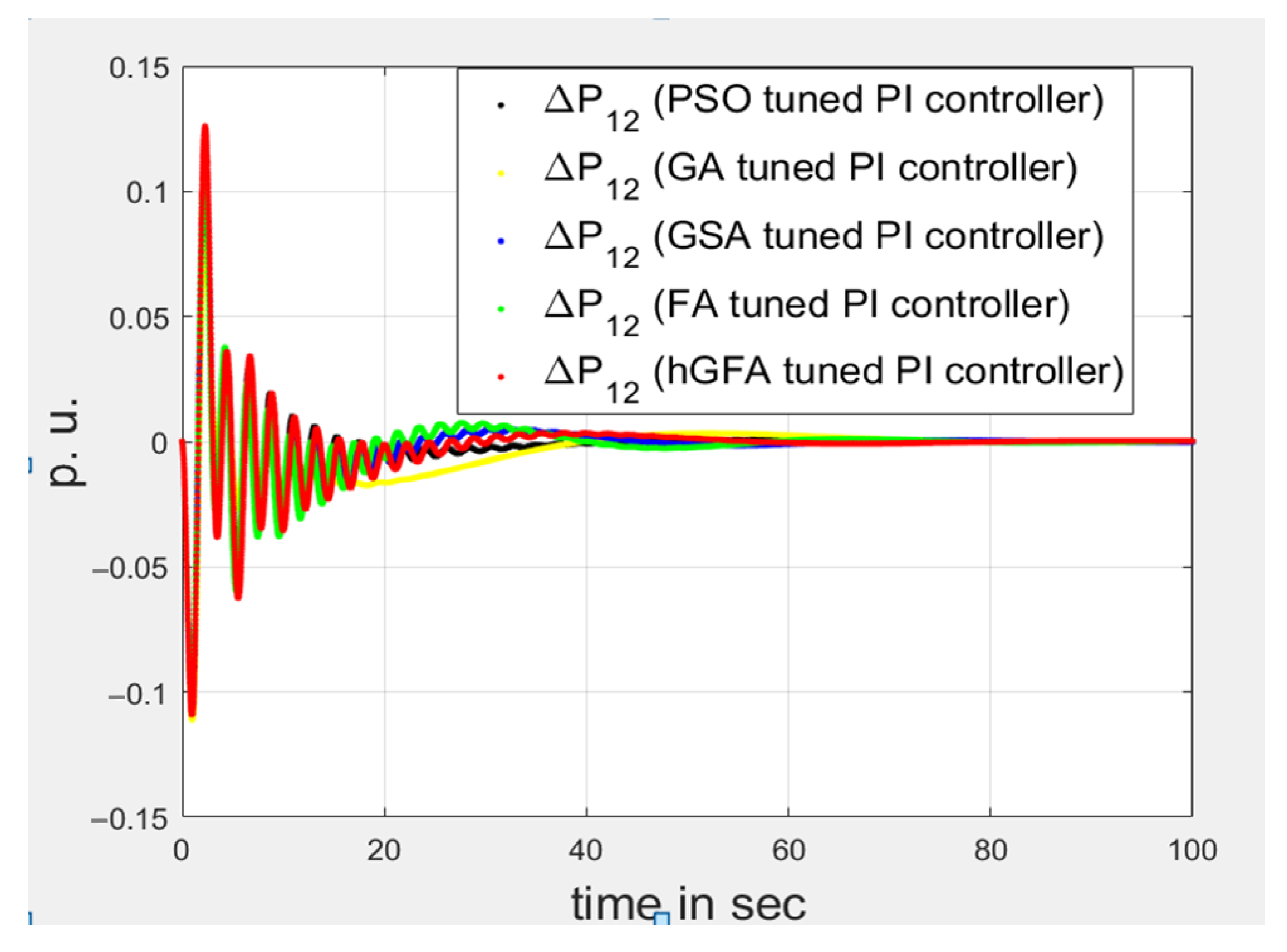
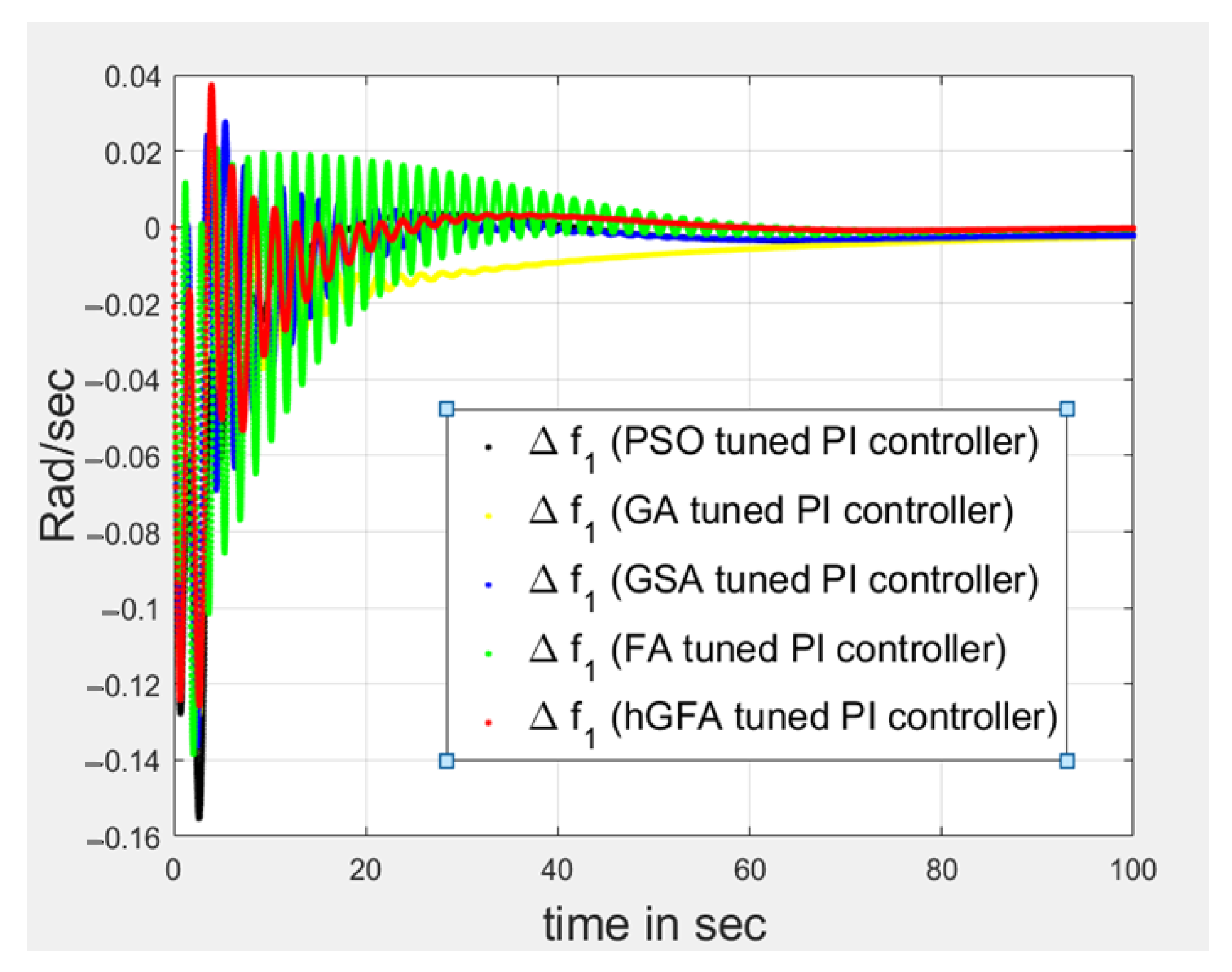
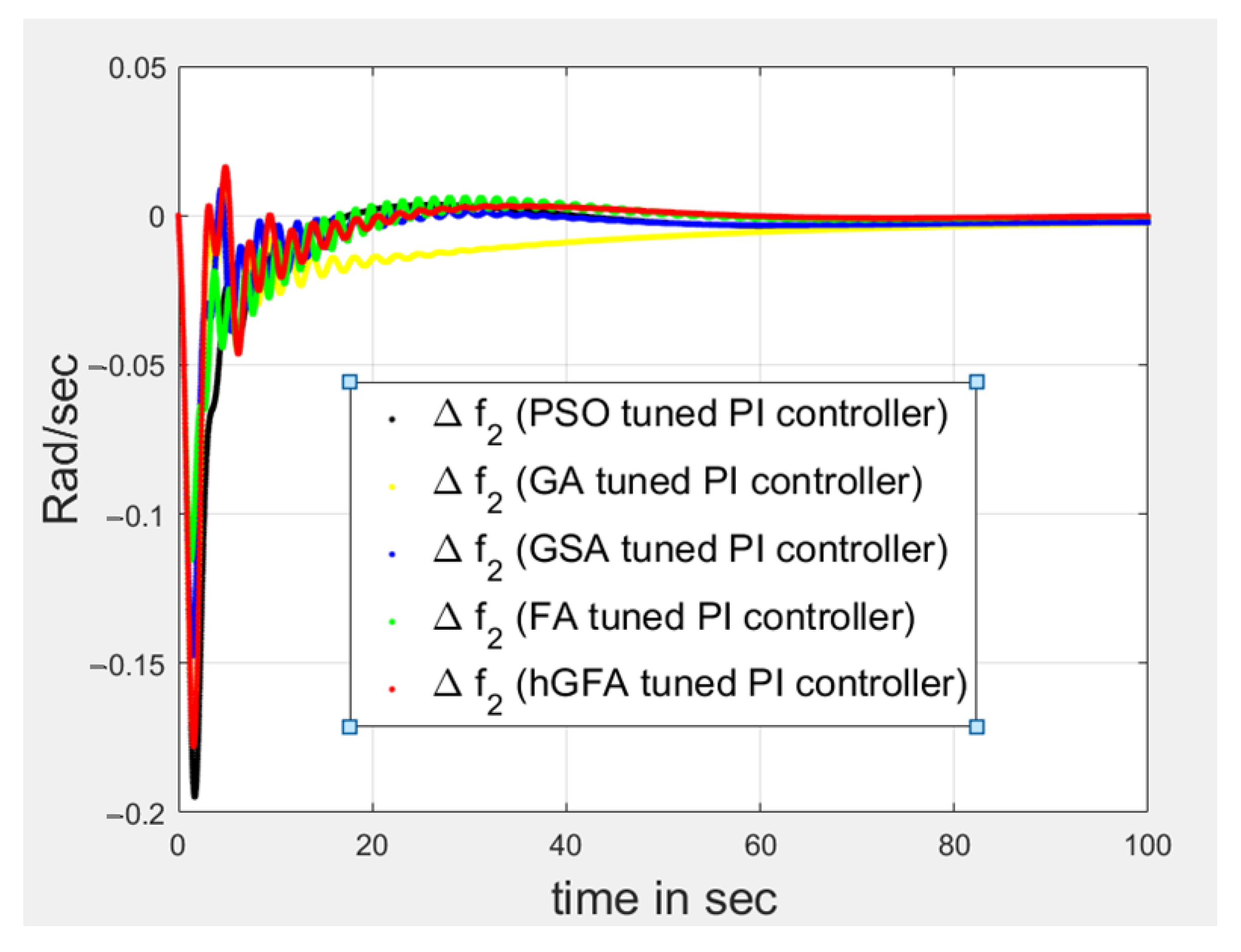
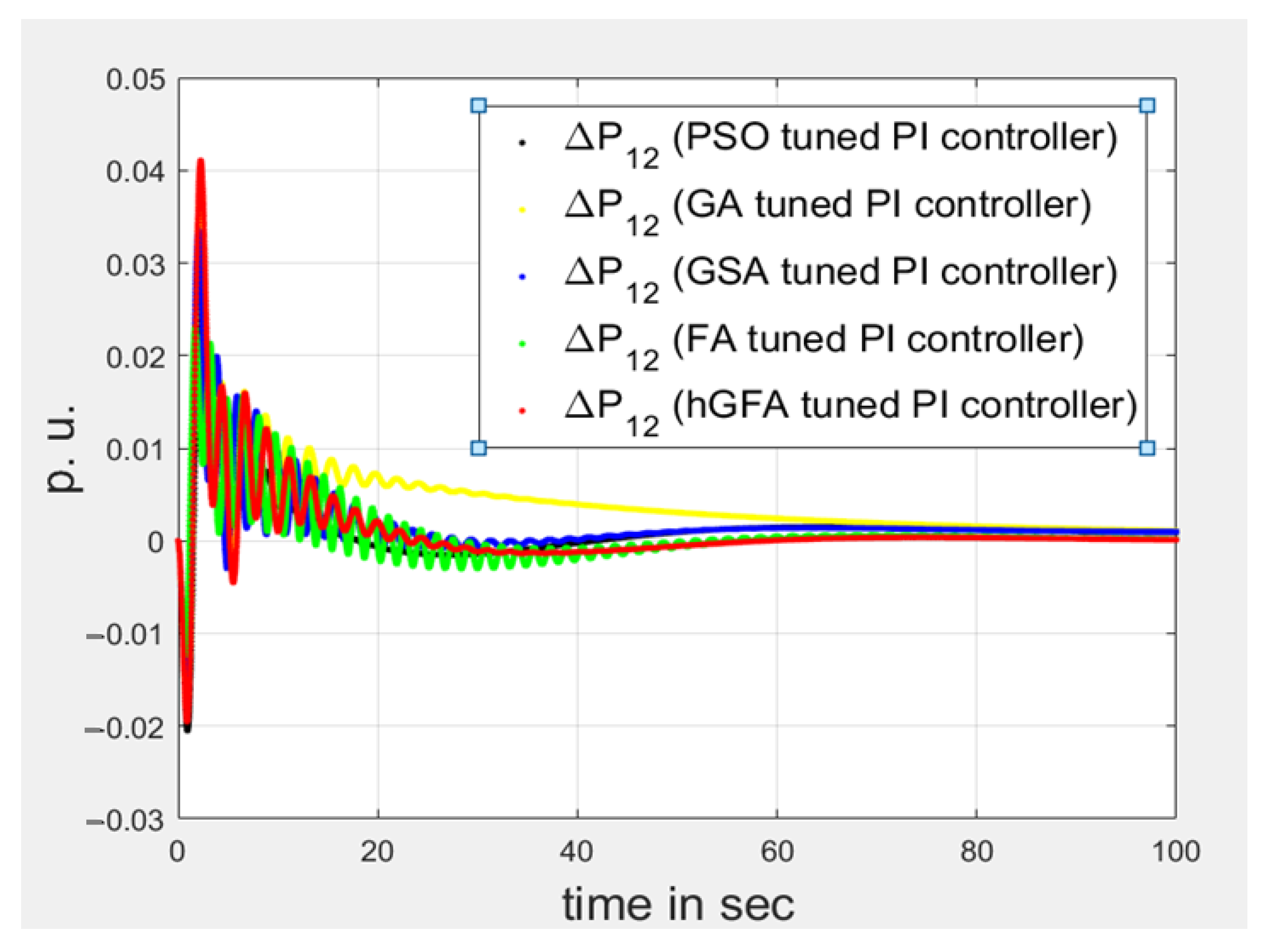
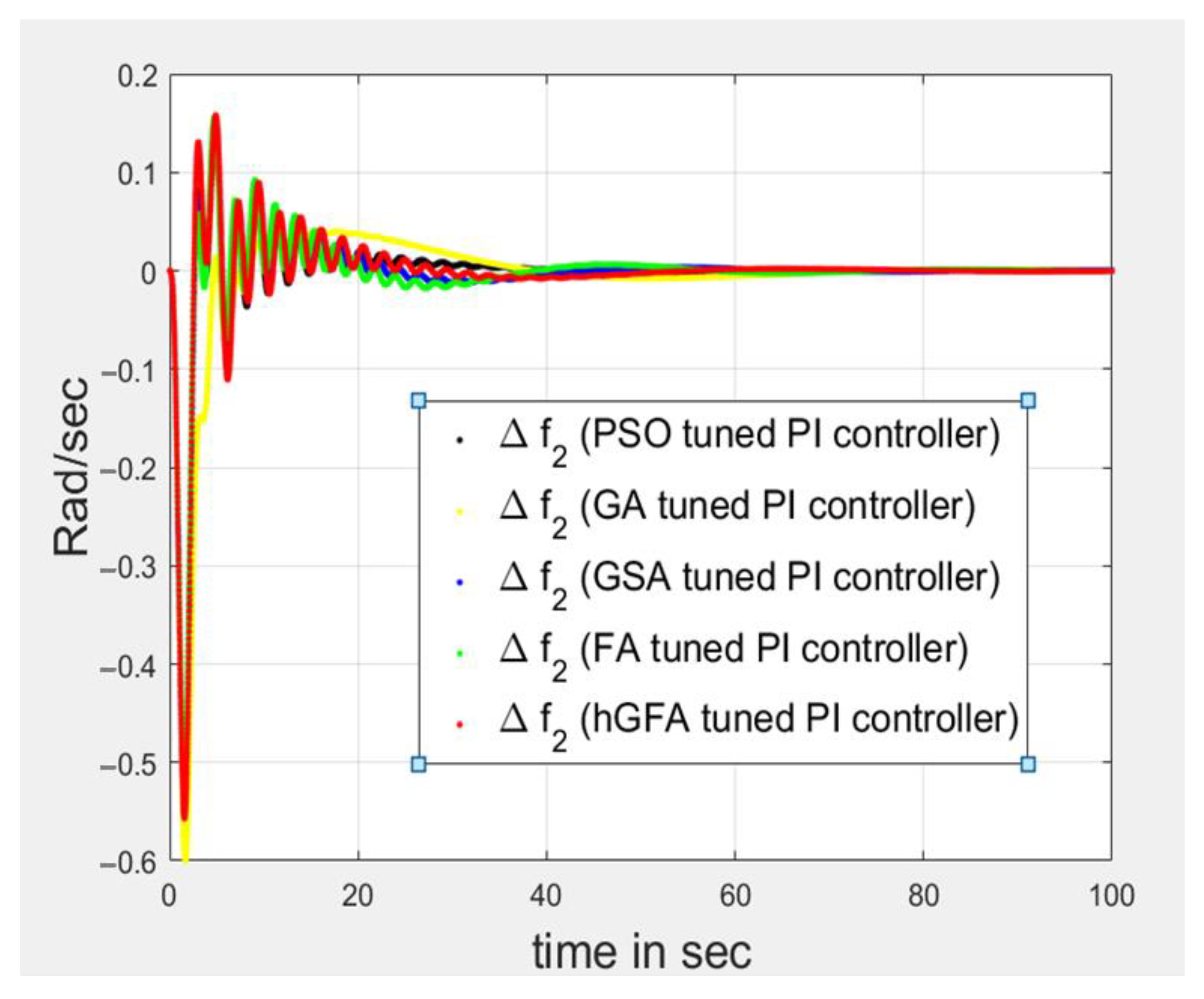
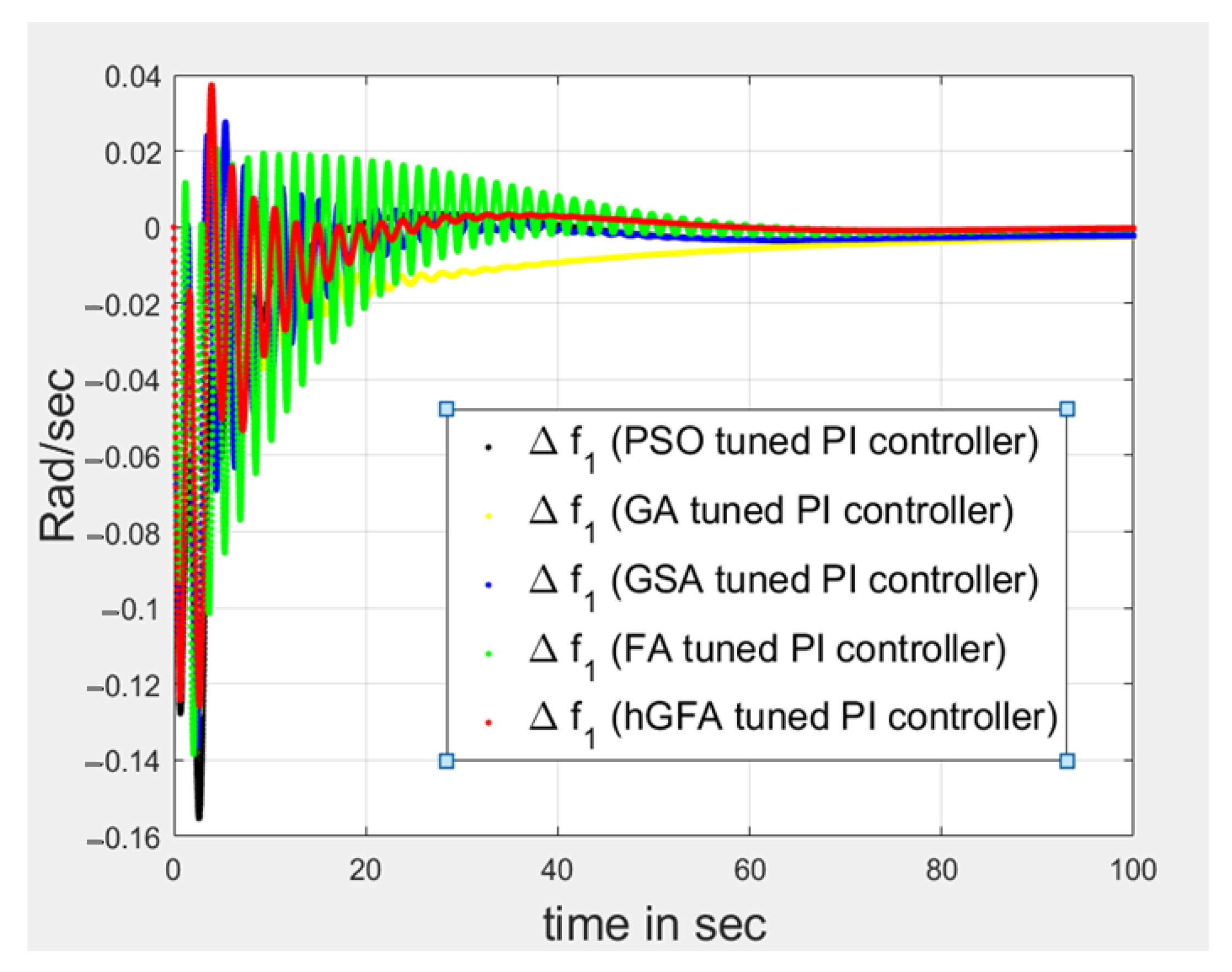
4.2.1. Case Study-I
4.2.2. Case Study-II
5. Analysis and Discussion
5.1. Case Study-I
5.2. Case Study-II
6. Conclusions
- The novel optimization technique, hGFA, based on the GSA and the FA, is proposed in this paper to address the LFC and tie-line power flow issues of the two-area HTPS.
- The performance of the proposed algorithm is compared with other well-known optimization techniques such as PSO, GA, GSA, and FA using ITAE as the objective function.
- For almost the same overshoot, the settling time value of the LF as well as the TLP is lowered by almost 15% in case study-I, and it is lowered by almost 50% in case study-II using the proposed hGFA, as compared to PSO, GA, GSA, and FA.
- The computation time is almost the same for all algorithms analyzed in this study, so the complexity of the proposed algorithm remains comparable to the basic algorithms and is used as a benchmark for evaluating performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Tabatabaei, N.M.; Kabalci, E.; Bizon, N. Microgrid Architectures, Control and Protection Methods, 1st ed.; Springer: London, UK, 2019. [Google Scholar]
- Thounthong, P.; Mungporn, P.; Pierfederici, S.; Guilbert, D.; Bizon, N. Adaptive Control of Fuel Cell Converter Based on a New Hamiltonian Energy Function for Stabilizing the DC Bus in DC Microgrid Applications. Mathematics 2020, 8, 2035. [Google Scholar] [CrossRef]
- Tabatabaei, N.M.; Ravadanegh, S.N.; Bizon, N. Power Systems Resiliency: Modeling, Analysis and Practice; Springer: London, UK, 2018. [Google Scholar]
- Li, Y.; Zhang, H.; Liang, X.; Huang, B. Event-Triggered-Based Distributed Cooperative Energy Management for Multienergy Systems. IEEE Trans. Industr. Inform. 2019, 15, 2008–2022. [Google Scholar] [CrossRef]
- Yushuai, L.; Gao, W.; Gao, W.; Zhang, H.; Zhou, J. A Distributed Double-Newton Descent Algorithm for Cooperative Energy Management of Multiple Energy Bodies in Energy Internet. IEEE Trans. Industr. Inform. 2020. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, Y.; Sun, H.; Li, Y.; Chow, M. Distributed Power Management for Networked AC–DC Microgrids with Unbalanced Microgrids. IEEE Trans. Industr. Inform. 2020, 16, 1655–1667. [Google Scholar] [CrossRef]
- Jha, A.V.; Ghazali, A.N.; Appasani, B.; Ravariu, C.; Srinivasulu, A. Reliability Analysis of Smart Grid Networks Iincorporating Hardware Failures and Packet Loss. Rev. Roum. Sci. Tech. El. 2021, 65, 245–252. [Google Scholar]
- Mishra, S.K.; Bhargav, A.; Jha, A.V.; Garrido, I.; Garrido, A.J. Centralized Airflow Control to Reduce Output Power Variation in a Complex OWC Ocean Energy Network. Complexity 2020, 2020, 2625301. [Google Scholar] [CrossRef]
- Jha, A.V.; Ghazali, A.N.; Appasani, B.; Mohanta, D.K. Risk Identification and Risk Assessment of Communication Networks in Smart Grid Cyber-Physical Systems. In Security in Cyber-Physical Systems; Studies in Systems, Decision and Control; Awad, A.I., Furnell, S., Paprzycki, M., Sharma, S.K., Eds.; Springer: Cham, Switzerland, 2021; Volume 339. [Google Scholar] [CrossRef]
- Li, Y.; Gao, W.; Yan, W.; Huang, S.; Wang, R.; Gevorgian, V.; Gao, D.W. Data-Driven Optimal Control Strategy for Virtual Synchronous Generator via Deep Reinforcement Learning Approach. J. Mod. Power Syst. Clean Energy 2021, 9, 27–36. [Google Scholar] [CrossRef]
- Saadat, H. Power System Analysis, 2nd ed.; McGraw-Hill: New York, NY, USA, 2009. [Google Scholar]
- Kundur, P. Power System Stability and Control, 1st ed.; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Wood, A.J.; Woolenberg, B.F. Power Generation Operation and Control, 3rd ed.; John Wiley and Sons: Hoboken, NJ, USA, 1984. [Google Scholar]
- Nanda, J.; Kaul, B.L. Automatic generation control of an interconnected power system. Proc. IEEE 1978, 125, 385–390. [Google Scholar] [CrossRef]
- Working Group Prime Mover and Energy Supply. Hydraulic turbine and turbine control models for system dynamic studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar] [CrossRef]
- Khodabakhshian, A.; Golbon, N. Unified PID design for load frequency control. In Proceedings of the International Conference on Control Applications, Taipei, Taiwan, 2–4 September 2004; IEEE: New York, NY, USA, 2004; pp. 1627–1632. [Google Scholar] [CrossRef]
- Nanda, J.; Kothari, M.L.; Satsangi, P.S. Automatic generation control of an interconnected hydrothermal system in continuous and discrete modes considering generation rate constraints. Proc. Inst. Elect. Eng. 1983, 130, 17–27. [Google Scholar] [CrossRef]
- Ramakrishna, K.S.S.; Bhatti, T.S. Load Frequency Control of Interconnected Hydro-Thermal Power Systems. In Proceedings of the International Conference on Energy and Environment, New Delhi, India, Month–August 2006; Available online: https://scholar.google.com/scholar?hl=en&as_sdt=0%2C5&q=Load+frequency+control+of+interconnected+hydro-thermal+power+systems&btnG= (accessed on 7 February 2021).
- Jha, A.V.; Gupta, D.K.; Appasani, B. The PI Controllers and its optimal tuning for Load Frequency Control (LFC) of Hybrid Hydro-thermal Power Systems. In Proceedings of the International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 17–19 July 2019; IEEE: New York, NY, USA, 2019; pp. 1866–1870. [Google Scholar] [CrossRef]
- Arora, K.; Kumar, A.; Kamboj, V.K.; Prashar, D.; Shrestha, B.; Joshi, G.P. Impact of Renewable Energy Sources into Multi Area Multi-Source Load Frequency Control of Interrelated Power System. Mathematics 2021, 9, 186. [Google Scholar] [CrossRef]
- Gupta, D.K.; Naresh, R.; Jha, A.V. Automatic Generation Control for Hybrid Hydro-Thermal System using Soft Computing Techniques. In 2018 5th IEEE Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering (UPCON 2018), Proceedings of the 5th IEEE Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering (UPCON), Gorakhpur, India, 2–4 September 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Prakash, S.; Sinha, S.K. Application of artificial intelligent and load frequency control of interconnected power system. Int. J. Eng. Sci. Technol. 2011, 3, 377–384. [Google Scholar] [CrossRef]
- Gupta, D.K.; Jha, A.V.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Load Frequency Control Using Hybrid Intelligent Optimization Technique for Multi-Source Power Systems. Energies 2021, 14, 1581. [Google Scholar] [CrossRef]
- Koley, I.; Bhowmik, P.S.; Datta, A. Load frequency control in a hybrid thermal-wind-photovoltaic power generation system. In Proceedings of the 4th International Conference on Power, Control & Embedded Systems (ICPCES), Allahabad, India, 9–11 March 2017; IEEE: New York, NY, USA, 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Khadanga, R.K.; Kumar, A. Hybrid adaptive ‘gbest’-guided gravitational search and pattern search algorithm for automatic generation control of multi-area power system. IET Gener. Transm. Distrib. 2016, 11, 3257–3267. [Google Scholar] [CrossRef]
- Khezri, R.; Oshnoei, A.; Oshnoei, S.; Bevrani, H.; Muyeen, S.M. An intelligent coordinator design for GCSC and AGC in a two-area hybrid power system. Appl. Soft Comput. 2019, 76, 491–504. [Google Scholar] [CrossRef]
- Gondaliya, S.; Arora, K. Automatic generation control of multi area power plants with the help of advanced controller. Int. J. Eng. Res. Technol. 2015, 4, 470–474. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. Secondary load frequency control for multi-microgrids: HiL real-time simulation. Soft Comput. 2019, 23, 5785–5798. [Google Scholar] [CrossRef]
- Çelik, E. Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft Comput. 2020, 25, 1–25. [Google Scholar] [CrossRef]
- Ionescu, L.-M.; Bizon, N.; Mazare, A.-G.; Belu, N. Reducing the Cost of Electricity by Optimizing Real-Time Consumer Planning Using a New Genetic Algorithm-Based Strategy. Mathematics 2020, 8, 1144. [Google Scholar] [CrossRef]
- Haes Alhelou, H.; Hamedani Golshan, M.E.; Hajiakbari Fini, M. Wind driven optimization algorithm application to load frequency control in interconnected power systems considering GRC and GDB nonlinearities. Electr. Power Compon. Syst. 2018, 46, 1223–1238. [Google Scholar] [CrossRef]
- Attia, A.E.-F.; Mohammed, A.E.-H. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimizer. IET Gener. Transm. Distrib. 2017, 11, 637–648. [Google Scholar]
- Nikmanesh, E.; Hariri, O.; Shams, H.; Fasihozaman, M. Pareto design of Load Frequency Control for interconnected power systems based on multi-objective uniform diversity genetic algorithm (MUGA). Int. J. Electr. Power Energy Syst. 2016, 80, 333–346. [Google Scholar] [CrossRef]
- Sahu, P.C.; Mishra, S.; Prusty, R.C.; Panda, S. Improved-salp swarm optimized type-II fuzzy controller in load frequency control of multi area islanded AC microgrid. Sustain. Energy Grids Netw. 2018, 16, 380–392. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms, 2nd ed.; Luniver Press: Beckington, UK, 2008. [Google Scholar]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the 1995 IEEE International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: New York, NY, USA; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, Y.; Ma, Z.; Li, X. A Comparative Study of Swarm Intelligence Algorithms for UCAV Path-Planning Problems. Mathematics 2021, 9, 171. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| O.T. | Kpr1 | Kpr2 | Ki1 | Ki2 |
|---|---|---|---|---|
| GA | 0.068627 | 1.9095 | 0.33831 | 0.033451 |
| PSO | 0.048043 | 1.2241 | 0.75369 | 0.001 |
| GSA | 1.4718 | 9.1185 | 0.4606 | 0.0006 |
| FA | 0.6366 | 5.5908 | 0.8408 | 0.0343 |
| hGFA | 0.0015 | 3.3537 | 0.8210 | 0.0600 |
| O.T. | Kpr1 | Kpr2 | Ki1 | Ki2 |
|---|---|---|---|---|
| GA | 0.033451 | 0.092078 | 0.7018 | 0.01 |
| PSO | 0.0010 | 1.5064 | 0.2833 | 0.0128 |
| GSA | 0.4273 | 1.9126 | 0.7865 | 0.0104 |
| FA | 1.2880 | 1.5767 | 0.5235 | 0.0333 |
| hGFA | 0.0010 | 1.5534 | 0.7537 | 0.0363 |
| Case Study | |||
|---|---|---|---|
| Optimization Techniques | System Variables | Overshoot | Settling Time (s) |
| Genetic Algorithm (GA) | ∆f1 | −0.5 | 40 |
| ∆f2 | −0.6 | 41 | |
| ∆P12 | −0.12 | 45 | |
| Particle Swarm Optimization (PSO) | ∆f1 | −0.47 | 40 |
| ∆f2 | −0.55 | 38 | |
| ∆P12 | −0.12 | 39 | |
| Gravitational Search Algorithm (GSA) | ∆f1 | −0.46 | 40 |
| ∆f2 | −0.52 | 40 | |
| ∆P12 | −0.12 | 43 | |
| Firefly Algorithm (FA) | ∆f1 | −0.47 | 45 |
| ∆f2 | −0.51 | 43 | |
| ∆P12 | −0.11 | 42 | |
| Hybrid Gravitational–Firefly Algorithm (hGFA) | ∆f1 | −0.46 | 35 |
| ∆f2 | −0.50 | 33 | |
| ∆P12 | −0.11 | 35 | |
| Case Study | |||
|---|---|---|---|
| Optimization Techniques | System Variables | Overshoot | Settling Time (s) |
| Genetic Algorithm (GA) | ∆f1 | −0.13 | 75 |
| ∆f2 | −0.17 | 70 | |
| ∆P12 | −0.02 | 70 | |
| Particle Swarm Optimization (PSO) | ∆f1 | −0.158 | 70 |
| ∆f2 | −0.2 | 60 | |
| ∆P12 | −0.021 | 45 | |
| Gravitational Search Algorithm (GSA) | ∆f1 | −0.15 | 65 |
| ∆f2 | −0.15 | 65 | |
| ∆P12 | −0.018 | 70 | |
| Firefly Algorithm (FA) | ∆f1 | −0.14 | 70 |
| ∆f2 | −0.12 | 60 | |
| ∆P12 | −0.014 | 70 | |
| Hybrid Gravitational–Firefly Algorithm (hGFA) | ∆f1 | −0.12 | 35 |
| ∆f2 | −0.17 | 30 | |
| ∆P12 | −0.02 | 30 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gupta, D.K.; Soni, A.K.; Jha, A.V.; Mishra, S.K.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Hybrid Gravitational–Firefly Algorithm-Based Load Frequency Control for Hydrothermal Two-Area System. Mathematics 2021, 9, 712. https://doi.org/10.3390/math9070712
Gupta DK, Soni AK, Jha AV, Mishra SK, Appasani B, Srinivasulu A, Bizon N, Thounthong P. Hybrid Gravitational–Firefly Algorithm-Based Load Frequency Control for Hydrothermal Two-Area System. Mathematics. 2021; 9(7):712. https://doi.org/10.3390/math9070712
Chicago/Turabian StyleGupta, Deepak Kumar, Ankit Kumar Soni, Amitkumar V. Jha, Sunil Kumar Mishra, Bhargav Appasani, Avireni Srinivasulu, Nicu Bizon, and Phatiphat Thounthong. 2021. "Hybrid Gravitational–Firefly Algorithm-Based Load Frequency Control for Hydrothermal Two-Area System" Mathematics 9, no. 7: 712. https://doi.org/10.3390/math9070712
APA StyleGupta, D. K., Soni, A. K., Jha, A. V., Mishra, S. K., Appasani, B., Srinivasulu, A., Bizon, N., & Thounthong, P. (2021). Hybrid Gravitational–Firefly Algorithm-Based Load Frequency Control for Hydrothermal Two-Area System. Mathematics, 9(7), 712. https://doi.org/10.3390/math9070712