
The Transient POD Method Based on Minimum Error of Bifurcation Parameter

Abstract
1. Introduction
2. Transient POD of Parametric Domain Order Reduction
2.1. Order Reduction Conditions of Parametric Domain
2.2. Order Reduction Model Equivalence of Optimal Sampling Length
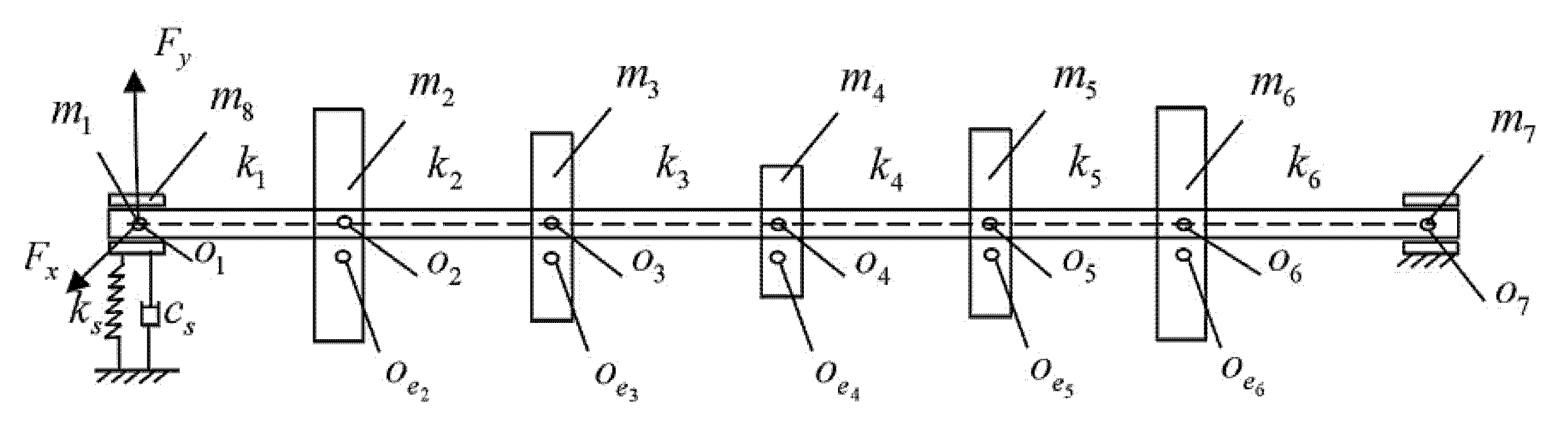
3. Modeling of Rotor-Bearing System with Looseness Fault
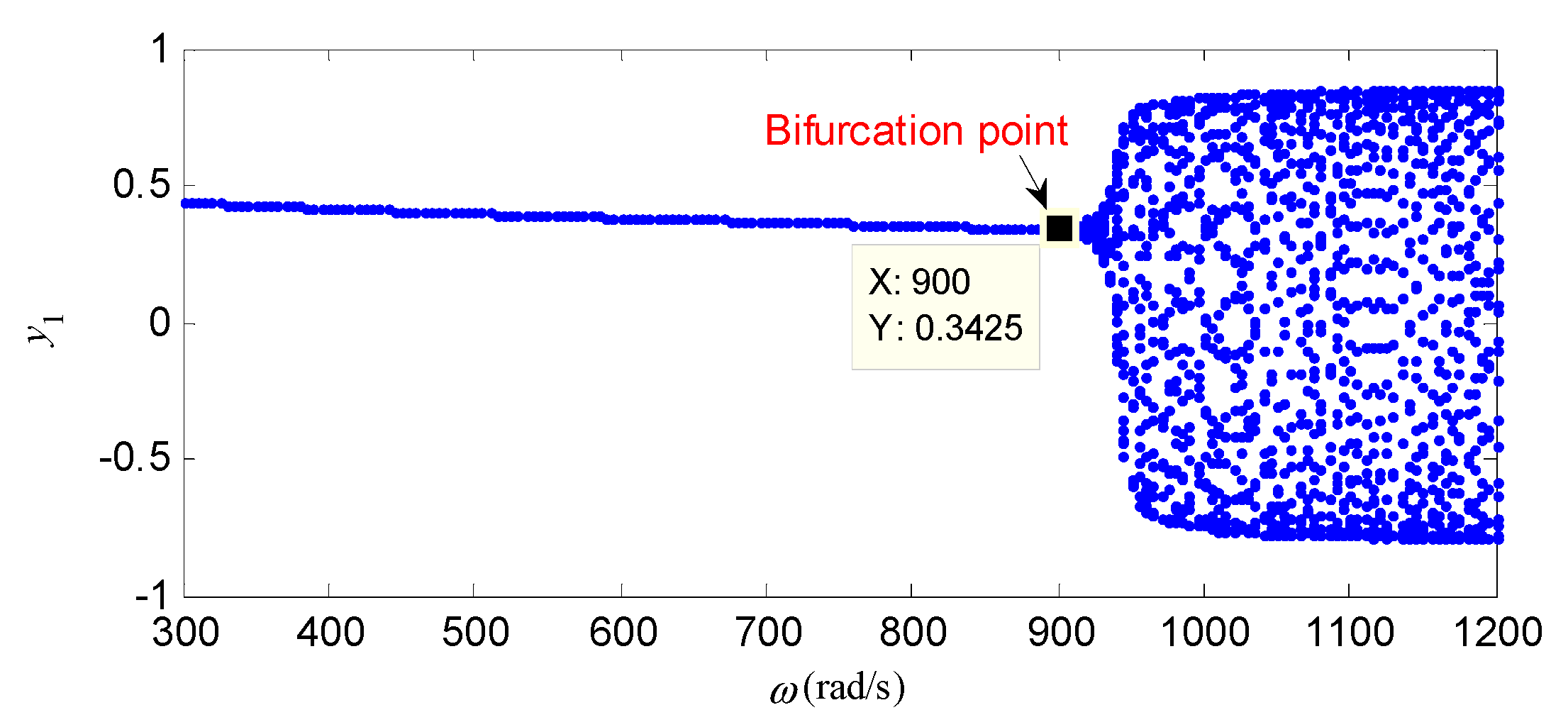
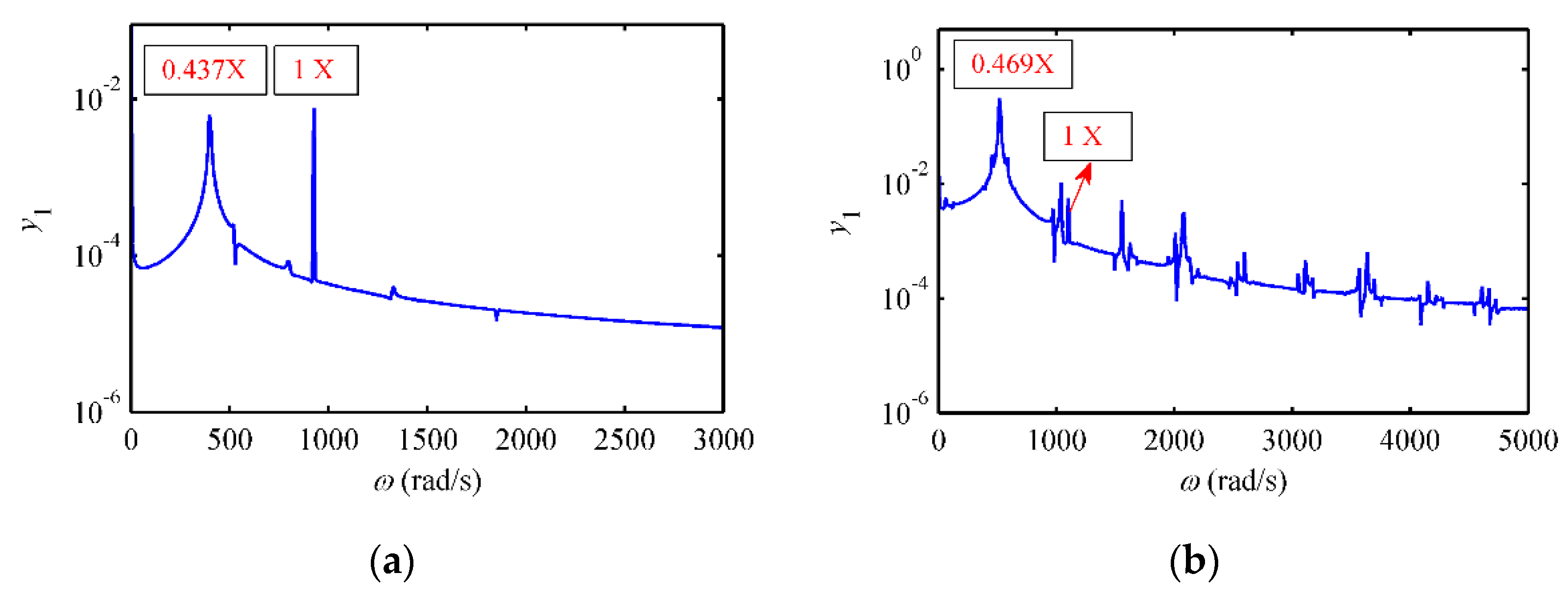
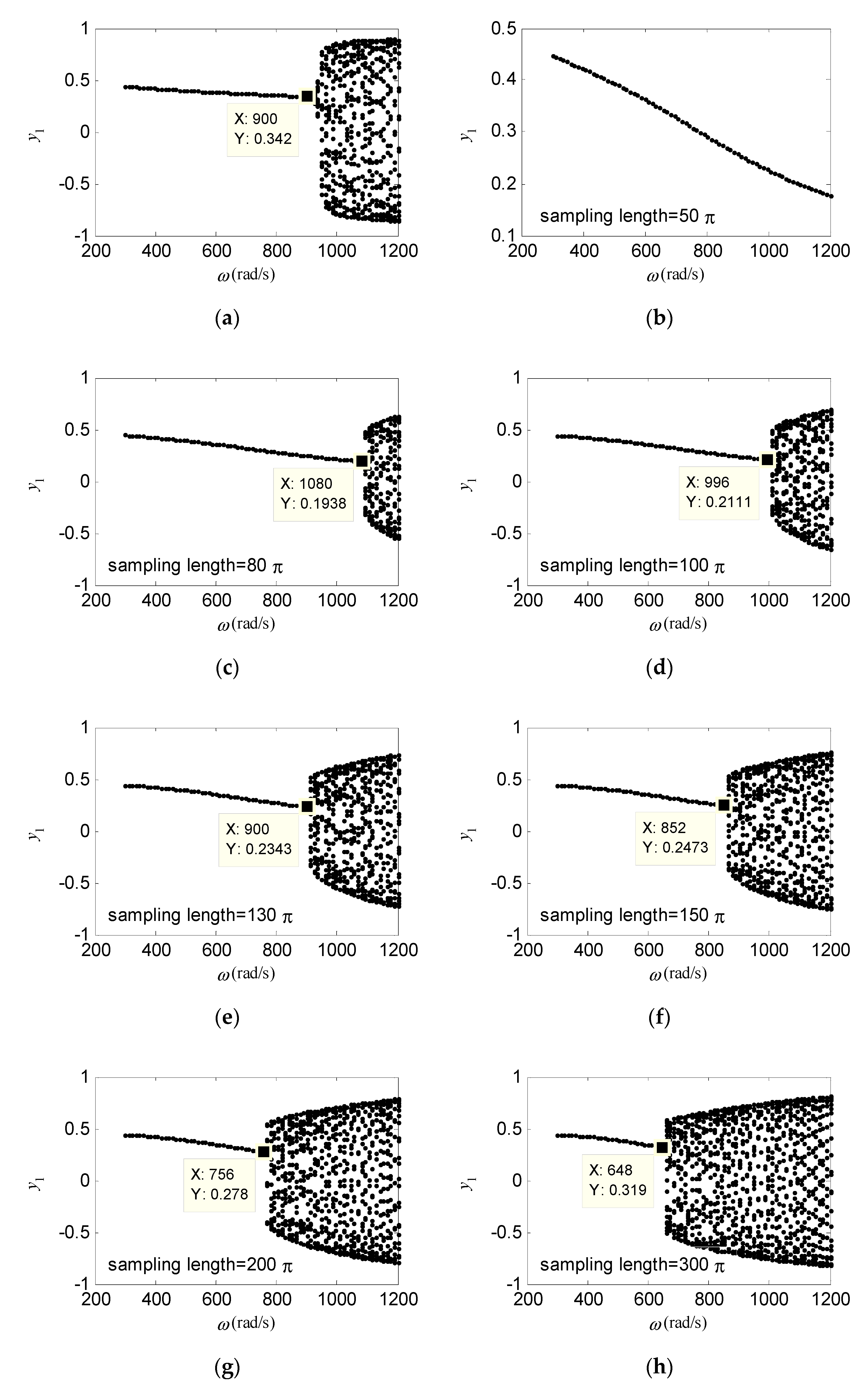
4. Analysis of Dynamics and Order Reduction Efficiency
5. Conclusions and Outlooks
- The transient POD method based on minimum error of bifurcation parameter has been proposed, and the order reduction of parameter domain of this method has been provided.
- The equivalence of different order reduction models that satisfy parameter domain order reduction conditions has been proved.
- A rotor system with looseness fault and supported by sliding bearings has been established by the Newton’s second law.
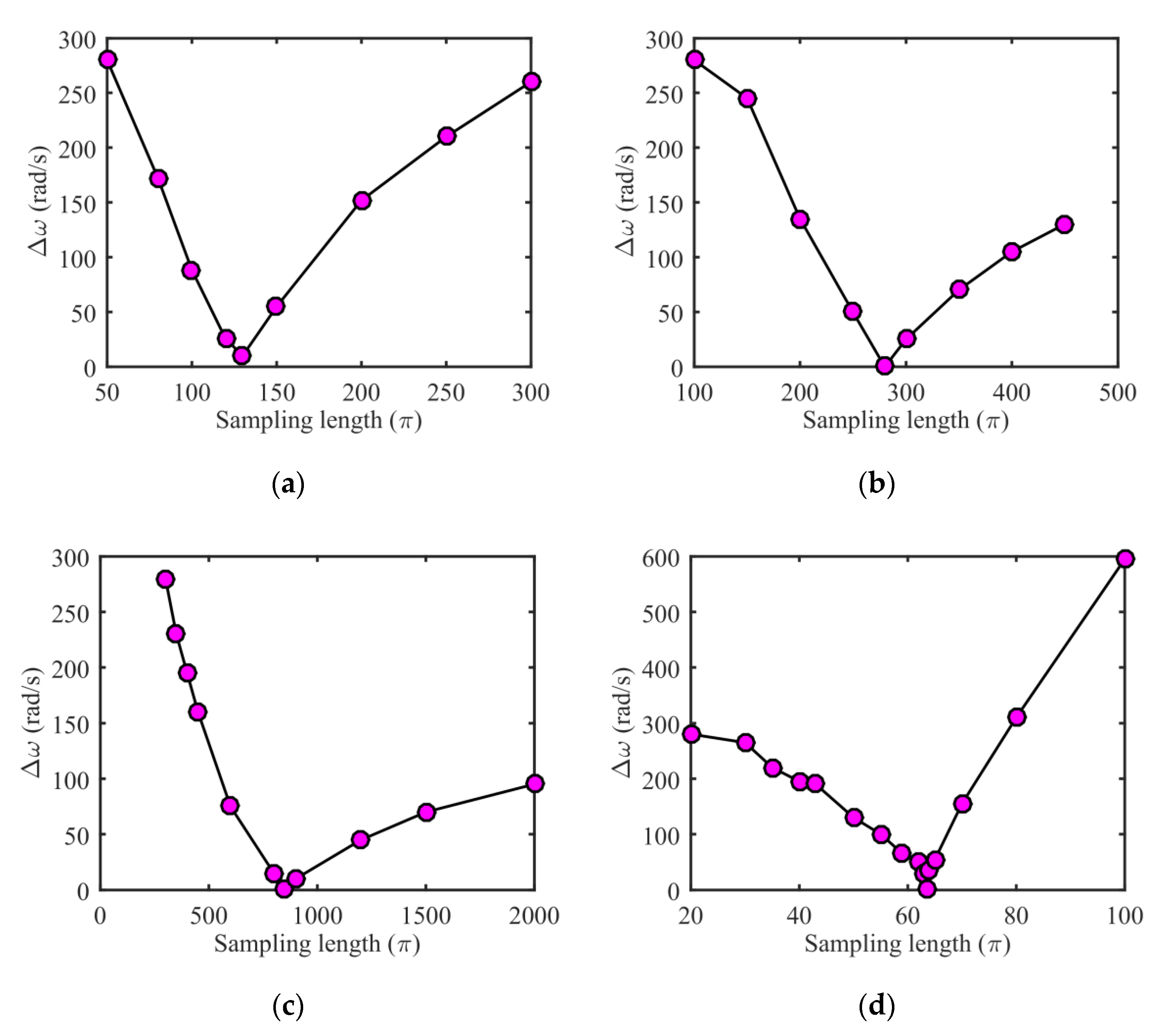
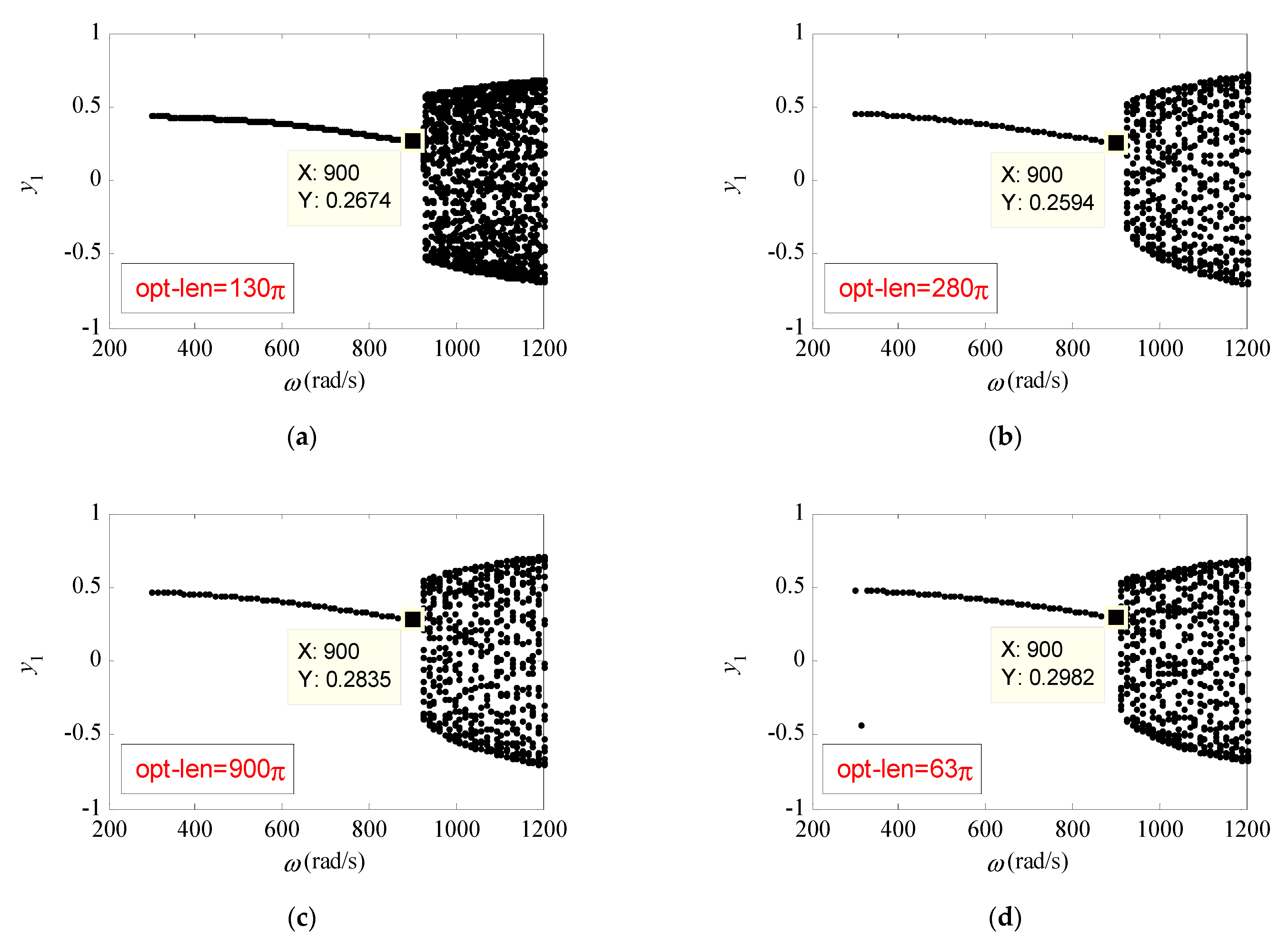
- The effects of speed, initial conditions, sampling length, and POM number to parameter domain order reduction has been analyzed and the existence of the optimal sampling length has been verified.
Author Contributions
Funding
Conflicts of Interest
References
- Xumin, G.; Jin, Z.; Hui, M.; Chenguang, Z.; Xi, Y.; Bangchun, W. A dynamic model for simulating rubbing between blade and flexible casing. J. Sound Vib. 2020, 466, 115036. [Google Scholar]
- Fu, C.; Xu, Y.; Yang, Y.; Lu, K.; Gu, F.; Ball, A. Response analysis of an accelerating unbalanced rotating system with both random and interval variables. J. Sound Vib. 2020, 466, 115047. [Google Scholar] [CrossRef]
- Yongfeng, Y.; Qinyu, W.; Yanlin, W.; Weiyang, Q.; Kuan, L. Dynamic Characteristics of Cracked Uncertain Hollow-shaft. Mech. Syst. Signal Process. 2019, 124, 36–48. [Google Scholar] [CrossRef]
- Shibo, Z.; Xingmin, R.; Wangqun, D.; Kuan, L.; Yongfeng, Y.; Chao, F. A transient characteristic-based balancing method of rotor system without trail weights. Mech. Syst. Signal Process. 2021, 148, 107117. [Google Scholar]
- Jin, Z.; Chenguang, Z.; Hui, M.; Kun, Y.; Bangchun, W. Rubbing dynamic characteristics of the blisk-casing system with elastic supports. Aerosp. Sci. Technol. 2019, 95, 105481. [Google Scholar]
- Yulin, J.; Kuan, L.; Chongxiang, H.; Lei, H.; Yushu, C. Nonlinear dynamic analysis of a complex dual rotor-bearing system based on a novel model reduction method. Appl. Math. Model. 2019, 75, 553–571. [Google Scholar]
- Marion, M.; Temam, R. Nonlinear Galerkin methods. SIAM J. Numer. Anal. 1989, 26, 1139–1157. [Google Scholar] [CrossRef]
- Kim, S.M.; Kim, J.G.; Chae, S.W.; Park, K.C. Evaluating mode selection methods for component mode synthesis. AIAA J. 2016, 54, 2852–2863. [Google Scholar] [CrossRef]
- Willcox, K.; Peraire, J. Balanced model reduction via the proper orthogonal decomposition. AIAA J. 2002, 40, 2323–2330. [Google Scholar] [CrossRef]
- Kuan, L.; Yulin, J.; Pangfeng, H.; Fan, Z.; Haopeng, Z.; Chao, F.; Yushu, C. The applications of POD method in dual rotor-bearing systems with coupling misalignment. Mech. Syst. Signal Process. 2021, 150, 107236. [Google Scholar]
- Daniele, D.; Edoardo, F. Modal parameter estimation for a wetted plate under flow excitation: A challenging case in using POD. J. Sound Vibr. 2019, 469, 214–234. [Google Scholar]
- Rega, G.; Troger, H. Dimension reduction of dynamical systems: Methods, models, applications. Nonlinear Dyn. 2005, 41, 1–15. [Google Scholar] [CrossRef]
- Steindl, A.; Troger, H. Methods for dimension reduction and their application in nonlinear dynamics. Int. J. Solids Struct. 2001, 38, 2131–2147. [Google Scholar] [CrossRef]
- Kuan, L.; Yulin, J.; Yushu, C.; Yongfeng, Y.; Lei, H.; Zhiyong, Z.; Zhonggang, L.; Chao, F. Review for order reduction based on proper orthogonal decomposition and outlooks of applications in mechanical systems. Mech. Syst. Signal Process. 2019, 123, 264–297. [Google Scholar]
- Kerschen, G.; Golinval, J.C.; Vakakis, A.F.; Bergman, L.A. The method of proper orthogonal decomposition for dynamical characterization and order reduction of mechanical systems: An overview. Nonlinear Dyn. 2005, 41, 147–169. [Google Scholar] [CrossRef]
- Kramer, B.; Willcox, K. Nonlinear model order reduction via lifting transformation and proper orthogonal decomposition. AIAA J. 2019, 57, 2297–2307. [Google Scholar] [CrossRef]
- Swischuk, R.; Mainini, L.; Peherstorfer, B.; Willcox, K. Projection-based model reduction: Formulation for physics-based machnie learing. Comput. Fluids 2019, 197, 704–717. [Google Scholar] [CrossRef]
- Yulin, J.; Kuan, L.; Lei, H.; Yushu, C. An adaptive proper orthogonal decomposition method for model order reduction of multi-disc rotor system. J. Sound Vib. 2017, 411, 210–231. [Google Scholar]
- Kuan, L.; Yushu, C.; Qingjie, C.; Lei, H.; Yulin, J. Bifurcation analysis of reduced rotor model based on nonlinear transient POD method. Int. J. Non-Linear Mech. 2017, 89, 83–92. [Google Scholar]
- Yang, Y.; Yiren, Y.; Dengqing, C.; Guo, C.; Yulin, J. Response evaluation of imbalance-rub-pedestal looseness coupling fault on a geometrically nonlinear rotor system. Mech. Syst. Signal Process. 2019, 118, 423–442. [Google Scholar] [CrossRef]
- Songhan, W.; Wenxiu, L.; Fulei, C. Speed characteristics of disk–shaft system with rotating part looseness. J. Sound Vib. 2020, 469, 115–127. [Google Scholar]
- Hui, M.; Xueyan, Z.; Yunnan, T.; Bangchun, W. Analysis of dynamic characteristics for a rotor system with pedestal looseness. Shock Vib. 2011, 18, 13–27. [Google Scholar]
- Adiletta, G.; Guido, A.R.; Rossi, C. Chaotic motions of a rigid rotor in short journal bearings. Nonlinear Dyn. 1996, 10, 251–269. [Google Scholar] [CrossRef]
- Ti, C.; Hao, W.; Haiyan, H.; Dongping, J. Quasi-time-optimal controller design for a rigid-flexible multibody system via absolute coordinate-based formulation. Nonlinear Dyn. 2017, 88, 623–633. [Google Scholar]
- Xu, Y.; Zhen, D.; Gu, J.; Rabeyee, K.; Chu, F.; Gu, F.; Ball, A.D. Autocorrelated Envelopes for early fault detection of rolling bearings. Mech. Syst. Signal Process. 2021, 146, 106990. [Google Scholar] [CrossRef]
- Xie, Z.; Shen, N.; Zhu, W.; Tian, W.; Hao, L. Theoretical and experimental investigation on the influences of misalignment on the lubrication performances and lubrication regimes transition of water lubricated bearing. Mech. Syst. Signal Process. 2021, 149, 107211. [Google Scholar] [CrossRef]
- Zhou, W.; Qiu, N.; Wang, L.; Gao, B.; Liu, D. Dynamic analysis of a planar multi-stage centrifugal pump rotor system based on a novel coupled model. J. Sound Vib. 2018, 434, 237–260. [Google Scholar] [CrossRef]
- Chao, F.; Guojin, F.; Jiaojiao, M.; Kuan, L.; Yongfeng, Y.; Fengshou, G. Predicting the dynamic response of dual-rotor system subject to interval parametric uncertainties based on the non-intrusive metamodel. Mathematics 2020, 8, 736. [Google Scholar]
- Ma, J.; Fu, C.; Zhang, H.; Chu, F.; Shi, Z.; Gu, F.; Ball, A. Modelling non-Gaussian surfaces and misalignment for condition monitoring of journal bearings. Measurement 2021, 174, 108983. [Google Scholar] [CrossRef]
- Liu, X.; Elishakoff, I. A combined importance sampling and active learning Kriging reliability method for small failure probability with random and correlated interval variables. Struct. Saf. 2020, 82, 101875. [Google Scholar] [CrossRef]
- Sinou, J.J.; Jacquelin, E. Influence of Polynomial Chaos expansion order on an uncertain asymmetric rotor system response. Mech. Syst. Signal Process. 2015, 50, 718–731. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m1 = m7 (kg) | 4 | c1 = c7 (N.s/m) | 800 |
| m2 = m6 (kg) | 25 | c2 =c6 (N.s/m) | 1750 |
| m3 = m5 (kg) | 20 | c3 =c5(N.s/m) | 1550 |
| m4 (kg) | 10 | c4(N.s/m) | 1350 |
| m8 (kg) | 5 | (N.s/m) | 350 |
| ki (i = 1…6) (N/m) | 5 × 108 | (N.s/m) | 500 |
| (N/m) | 2.5 × 108 | (mm) | 0.22 |
| (N/m) | 1 × 109 | L (mm) | 30 |
| e3 (mm) | 0.01 | R (mm) | 30 |
| (pa.s) | 0.018 | c (mm) | 0.11 |
| m1 = m7(kg) | 4 | c1 = c7 (N.s/m) | 800 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Zhang, H.; Zhang, K.; Jin, Y.; Zhao, S.; Fu, C.; Chen, Y. The Transient POD Method Based on Minimum Error of Bifurcation Parameter. Mathematics 2021, 9, 392. https://doi.org/10.3390/math9040392
Lu K, Zhang H, Zhang K, Jin Y, Zhao S, Fu C, Chen Y. The Transient POD Method Based on Minimum Error of Bifurcation Parameter. Mathematics. 2021; 9(4):392. https://doi.org/10.3390/math9040392
Chicago/Turabian StyleLu, Kuan, Haopeng Zhang, Kangyu Zhang, Yulin Jin, Shibo Zhao, Chao Fu, and Yushu Chen. 2021. "The Transient POD Method Based on Minimum Error of Bifurcation Parameter" Mathematics 9, no. 4: 392. https://doi.org/10.3390/math9040392
APA StyleLu, K., Zhang, H., Zhang, K., Jin, Y., Zhao, S., Fu, C., & Chen, Y. (2021). The Transient POD Method Based on Minimum Error of Bifurcation Parameter. Mathematics, 9(4), 392. https://doi.org/10.3390/math9040392