1. Introduction
There are many phenomena in the world that can be modelized in the form of mathematical problems such as HIV infection [
1,
2], smoking habit [
3], computer viruses [
4], energy supply-demand model [
5] and others [
6,
7]. They can help us to analyse and predict the phenomena using the mathematical methods, deep learning and big data. Such Volterra models that contain past information are called
hereditary systems. There are various applications in economics (Solow models of capital growth of global economy, optimal renovation), many examples from biology (Lotka–Volterra predator-prey, spread of epidemics, e.g., COVID epidemic), and from engineering (mechanical and electrical engineering, material sciences, and other application). Recently, many authors modelized the load leveling problem arising in the energy storages of the powering systems in the form of the linear and non-linear Volterra integral equation (VIE) with discontinuous kernel. They have been focused on solving this problem by numerical and semi-analytical methods. For introduction to the theory of the VIE of the first kind with discontinuous kernals readers may refer to the monograph [
8]. Such models belongs to the class of
ill-posed problems. The discontinuous kernels introduce fundamental difficulties in the theory of nonlinear Volterra equations of the first kind: there is a loss of uniqueness of solutions, solutions may blow-up or branching phenomena may occur (see ch. 5 in [
9,
10]). The existence of a continuous solution depending on free parameters and sufficient conditions for the existence of a unique continuous solution of the systems VIE of the first kind with discontinuous kernels were derived in [
11]. In [
12] the energy storages with renewable and diesel generation was analysed based on the VIEs. The system of VIEs with piecewise smooth kernels in linear and nonlinear cases was studied in [
13,
14] and the first kind VIE with discontinuous kernel was illustrated in [
15]. Also, in [
16], the VIE was applied to modelize the load forecast in EPS with renewable generation. The Taylor-collocation method and the homotopy perturbation method were applied for solving this problem in [
17,
18] and the validated numerical results were used to forecast the load leveling problem in [
19].The theory of Volterra operator equations of the first kind with piecewise continuous kernels is introduced in [
20]. The solvability of this problem was discussed in [
21] and the existence of a unique continuous solution of the system of VIEs with discontinuous kernels was illustrated in [
11]. In [
22], the application of the VIE with Abel’s kernel was discussed on the infrared tomography and in [
23] the convex majorants method was applied for solving nonlinear VIEs. Also, in [
24,
25] the weakly singular nonlinear VIE of the second kind was discussed numerically.The Volterra convolution integral equations of the first kind with general discontinuous kernels readers were attacked in [
26] using cubic “convolution spline” method. For the theory of linear and nonlinear ill-posed problems and their regularization readers may refer to the seminal monographs by A.N. Tikhonov et al. [
27,
28].
The Adomian decomposition method (ADM) is one of iterative and applicable methods for solving various problems such as the Klein-Gordon equation [
29], Triki-Biswas equation [
30], the problem of boundary layer convective heat transfer [
31], integral equations (IEs) of the first and second kinds with hypersingular kernels [
32,
33], the Volterra integral form of the Lane-Emden equations with initial values and boundary conditions [
34], Cauchy IEs of the first kind [
35], linear and nonlinear IEs [
36] and partial differential equations [
37].
We know that these methods and many other methods for solving the VIEs are based on the floating-point arithmetic (FPA). Thus in order to show the accuracy of the numerical results the authors apply the absolute error as follows
where
and
are the exact and approximate solutions. But we have some disadvantages. Condition (
1) depends on the value
and also the exact solution. But we do not know the optimal value of
and in many cases we do not have the exact solution to compare the results. If we choose the small values of
we will have extra iterations and if we have the large values then the numerical process will be stopped very soon and we will not be able to produce the accurate results.
Thus, in order to show the efficiency od the numerical procedures instead of condition (
1) we apply the following termination criterion
which depends on two successive approximations
and
and in the right hand side we have the informatical zero
. It shows that the NCSDs between two successive approximations is zero.
Because of these problems, we introduce the stochastic arithmetic (SA) instead of the FPA. In the SA, we apply the CESTAC method and instead of the absolute error we use the termination criterion based on two successive approximations. So we do not need to have the exact solution. Also, in the right hand side we have the informatical zero
instead of
. The numerical algorithm will be stopped when the number of common significant digits(NCSDs) of two successive approximations equals zero. Also, the CESTAC method can be implemented on the CADNA library using LINUX operating system that its codes must be written by ADA, FORTRAN or C/C++ codes [
38]. Using the CESTAC method and the CADNA library we can find the optimal approximation, error and iteration of the numerical procedure [
39,
40]. The CESTAC method was studied by Laporet and Vignes for the first time and after that some researchers from LIP6, the computer science laboratory in Sorbonne University in Paris, France (
https://www-pequan.lip6.fr/) extended this method by producing the CADNA library [
41,
42,
43,
44]. Also, recently this method has been applied to validate the results of the Newton–Cotes integration rule [
45], Gaussian integration rule [
46], collocation method for solving Fredholm IEs [
47], finding the optimal convergence control parameter of the homotopy analysis method [
48], solving fuzzy IEs by Sinc-collocation method [
49], solving fuzzy numerical integrals [
50], finding the optimal regularization parameter for solving first kind IEs [
51], solving osmosis model [
52,
53], solving load leveling problem and solving the VIEs with discontinuous kernel using the homotopy perturbation method and the Taylor-collocation method [
17,
18,
19].
This study applies the ADM for solving the linear and non-linear VIE with discontinuous kernel and validates the numerical results using the CESTAC method and the CADNA library. So we will be able to find the optimal approximation, the optimal error and the optimal iteration of the ADM for solving Equation (
4). The uniqueness theorem, the error theorem and the convergence theorem of the ADM are proved. Also, the main theorem of the CESTAC method is discussed. Based on this theorem, we can apply the new termination criterion instead of the absolute error. Several examples are solved and the CESTAC method is applied to validate the results and finding the optimal results of the ADM for solving the mentioned problem.
2. Stochastic Arithmetic and the CESTAC Method
The CESTAC method is based on a probabilistic approach of the round-off error propagation which can help us to replace the FPA by a random arithmetic. The parallel implementation is one of the good aspect of this method. Applying this method,
k runs of the computer program can be done in parallel. Thus, a new arithmetic that we call the SA is defined. For definitions and properties of the SA please see [
54]. In order to apply the CESTAC method, we should substitute the SA instead of the FPA. Thus we will be able to run each arithmetical operation
k times synchronously before running the next operation. All of this process should be done using the CADNA library. During the run, the CADNA library can be found the NCSDs of each results and if the result is zero then the CADNA library will be stopped by showing the informatical zero
. Thus each result can be appeared as a random variable.
If we produce the representable values by computer and collect them in
B, then
can be written for
with
mantissa bits of the binary FPA as
where
and
E are sign, missing segment of the mantissa and the binary exponent of the result, respectively. Also, we know that for
, the numerical results can be produced in single and double precisions [
39,
40]. By assuming
as a casual variable that uniformly distributed on
, we will be able to make perturbation on last mantissa bit of
. Then the mean
and the standard deviation
values can be produced for results of
which have important role to identify the precision of
. If we repeat the process for
k times, we will have the quasi Gaussian distribution on
and we will have equality between
and the exact
.
Algorithm 1, shows the process step by step, where
is the value of
T distribution as the confidence interval is
, with
freedom degree [
40,
42,
43,
44].
| Algorithm 1: Algorithm of the CESTAC method. |
| Step 1- Produce k samples of in the form of by making perturbation on the last bit of mantissa. |
| Step 2- Calculate . |
| Step 3- Find . |
| Step 4- Apply
to find the NCSDs between and . |
| Step 5- Show if or . |
In order to apply the CESTAC method we do not need to apply the mentioned algorithm directly by the usual softwares such as MATLAB, Mathematica, Maple and others. This method can be implemented using the CADNA library that we need to write the CADNA codes using C, C++, FORTRAN or ADA codes [
38], then the CESTAC method can be done automatically on the numerical procedures.
Applying the CESTAC method and the CADNA library we have the following advantages than the mathematical methods based on the FPA:
Generally, the FPA depends the absolute error that we need to have the exact solution but in the CESTAC method we do not need to the exact solution.
In some cases, the absolute error depends on the positive small value that we do not know its optimal value. In the CESTAC method we do not need to have this value.
In the CESTAC method the algorithm will be stopped in the optimal iteration but in the FPA, the extra iterations can be produced without improving the accuracy of results.
In the FPA, the numerical algorithm can be stopped very soon before producing the accurate results.
In the CESTAC method, we will be able to identify the optimal values such as optimal iteration, approximation and error but in the FPA we can not do it.
The following codes are the sample codes of the CADNA library:
#include <cadna.h>
cadnainit(-1);
main()
{
doublest Parameter;
do
{
Write the main program here;
printf(“ %s ”,strp(Parameter));
}
while(u[n]-u[n-1]!=0);
cadnaend();
}
3. Main Idea
Consider the following second kind nonlinear VIE with discontinuous kernel
where
and
[
15,
20]. Also,
we assume that
is bounded and
is discontinuous along continuous curves
such that
and the nonlinear term
satisfies in the Lipschitz continuous such that
.
The ADM assumes that the unknown function
can be constructed by an infinite series of the form
and the Adomian polynomials [
55] can be obtained in the following form:
where
shows the partial sum. Then we have
Also, the nonlinear term
can be decomposed by an infinite series of polynomials given by
where
which is called the Adomian polynomials.
The following theorems show the uniqueness, convergence and error of the method. The well known contraction mapping principle is applied to prove them.
Lemma 1. If we apply the ADM for solving Equation (4), the obtained solution will be unique whenever , where . Theorem 1. The series solution (5) for solving Equation (4) using the ADM converges if and . Proof. Let
be the Banach space of all continuous functions on
J such that
. Let
be the sequence of partial sums where
and
are arbitrary partial sums with
. We should prove that
is a Cauchy sequence in the Banach space:
Using Equation (
6), we can write
and then
and for
we have
Applying the triangle inequality we have
Since
we can write
and we have
We know that is bounded and . So, converges to zero, as m approaches infinity. It can shows that is a Cauchy sequence in and the series converges. □
Theorem 2. If we apply the series solution (5) for solving Equation (4), the maximum absolute error truncation can be obtained as followswhere . Proof. Applying inequality (
10) and Theorem 1 lead to
If
n approaches
∞ then
will approach to
and
and
Finally, the maximum error on
J can be obtained as
□
Remark 1. Introducing an auxiliary parameter and differentiating with respect to it for calculating the initial approximations was effectively employed and in other nonlinear problems. Here readers may refer to [56]. Definition 1 ([
40]).
The NCSDs for two real numbers can be obtained as follows(2) for all real numbers , .
Theorem 3. Let and be the exact and numerical solutions of problem (4) which is obtained by using the ADM. We havewhere shows the NCSDs of and is the NCSDs of two successive iterations . Proof. Using Definition 1 we get
Applying Equations (
13) and (
14) we have
From Theorem 2 we can write
. Thus for
n enough large we get
□
Theorem 3 shows that when n increases, the NCSDs between two sequential results obtained from the algorithm is almost equal to the NCSDs of the n-th iteration and the exact solution at the given point t which means that for an optimal index like , when then .
4. Numerical Results
In this section, we apply the ADM for solving the mentioned examples. The numerical results are obtained based on the FPA and the SA. In the FPA, the numerical algorithm depend on the value
. Also, the number of iterations for different values of
are obtained. It is obvious that for small values of
the algorithm can not be stopped and we will have many iterations without improving the accuracy of the results. Also, for large values of
, the algorithm will be stopped very soon without providing the accurate results. In the SA and applying the CESTAC method and the CADNA library we can find the optimal results and the optimal iteration and error of the ADM for solving the VIEs in linear and nonlinear forms with discontinuous kernels. Clearly, we can see that applying the CESTAC method, CADNA library and the novel termination criterion (
2) is better and applicable than the FPA and the stopping condition (
1).
Example 1. Consider the following linear VIE with discontinuous kernelwhereand the exact solution is . In Table 1 the numerical results are obtained using the ADM based on the FPA for and the algorithm is stopped at . Also, in Table 2, the number of iterations for various ε are shown. It is obvious that for large and small values of ε the accurate results can not be found. But in Table 3, the results are obtained based on the SA using the CESTAC method and the CADNA library. We do not have ε in this table. The algorithm is stopped at and it shows the optimal iteration of the ADM for solving this problem. Also, the optimal error is and the optimal approximation is . Example 2. Consider the following linear VIE with discontinuous kernelwhereand the exact solution is . The numerical results are obtained based on the FPA for and demonstrated in Table 4. Also, the number of iterations for different values of ε are presented in Table 5. The numerical results based on the SA are demonstrated in Table 6. Using this table, the optimal iteration, the optimal approximation and the optimal error can be found that they are and . Example 3. Consider the following nonlinear VIE with non-smooth kernelwhereand the exact solution is . In Table 7, the numerical results are obtained from the CESTAC method and the CADNA library. We can find that the optima iteration for solving this example using the ADM is , the optimal approximation is and the optimal error is . The informatical zero , shows that the NCSDs between are almost equal to the NCSDs between and . In Table 8, the number of iterations for different values of ε are obtained based on the FPA. We can find that for small values of ε we have large number of iterations and for large values of ε we do not have enough iterations and it is one of the main problems of the FPA in comparison with the SA. Example 4. Consider the following nonlinear VIEwhereand the exact solution is . The numerical results of the CESTAC method are presented in Table 9. For finding these results we applied the termination criterion (2) which depends on two successive approximations. We should note that the third column in this table is only for comparison between results and generally we do not need to have the exact solution in the CESTAC method. Based on this table we can find the optimal iteration , the optimal approximation and the optimal error . In Table 10, we can find the number of iterations of the ADM for solving this example based on the FPA. Example 5. (direct and inverse problems) This example is presented to study the sensitivity of for solving VIEs with discontinuous kernels. Consider the following nonlinear VIEwhere the exact solution is(solution with fluctuations), and the discontinuous kernel iswhere p is a parameter. The direct problem(calculating ):
Nonuniform grid of nodes, identical to t and τ, is given bywhere N is the number of nodes. The right hand-side is calculated numerically using the trapezoidal formula on grids (18) according to Algorithm 2. | Algorithm 2: Algorithm of calculating . |
| p=0.5+1e-10; x(1)=ye(1); %ye is the exact solution (16) |
| for i=2:N |
| int=0; |
| for j=2:i |
| int=int+(t(j)-t(j-1))/2*(K(i,j-1)*ye(j-1)^2+K(i,j)*ye(j)^2); |
| end %j |
| x(i)=ye(i)-int; |
| end %i |
In Example 5, the grid of nodes is
i.e., , , .
The inverse problem(solving of VIE):
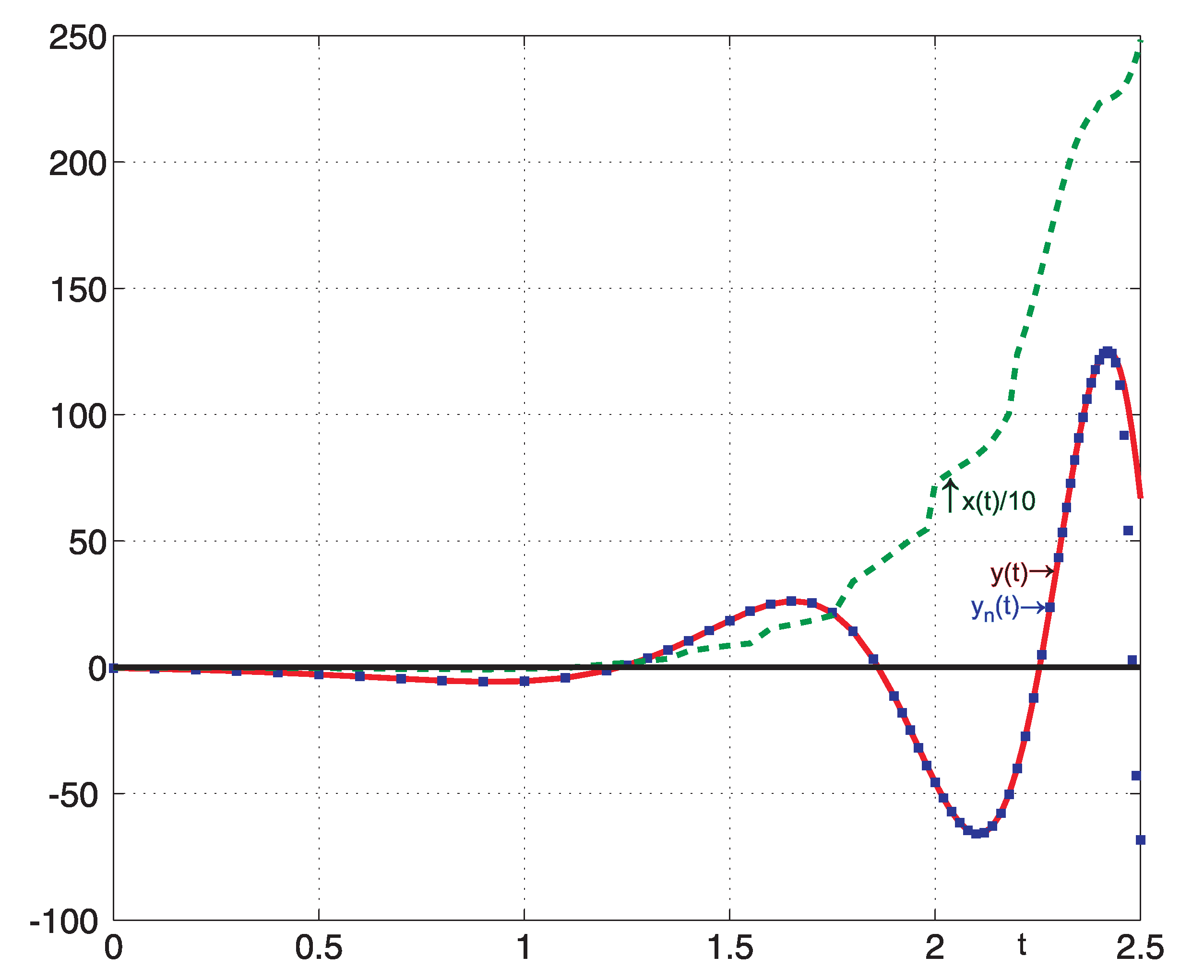
The recurrent solution is obtained based on Algorithm 3. Figure 1 shows the right hand-side , exact solution and obtained solution ([57], pp. 41–43). Moreover, the parameter p of the kernel in the direct and inverse problems has slightly different values. As a result, the solution at (with large fluctuation) differs markedly from the exact solution. Further, regularization should be applied to increase the stability of the solution. | Algorithm 3: Algorithm of the recurrent solution. |
| p=0.5; y1=x1; h2=t2-t1; h22=h2/2; |
| y2-h22*(K21*y1^2+K22*y2^2)=x2; |
| h22*K22*y2^2-y2+x2+h22*K21*y1^2=0; %quadratic equation for y2 |
| y2=(1-\sqrt(1-2*h2*K22*(x2+h22*K21*y1^2)))/(h2*K22); %solution of QE |
| for i=3:N |
| yi-\sum_{j=2}^i hj/2*(K(i,j-1)*y(j-1)^2+Kij*yj^2)=xi; |
| hi2=hi/2; int=xi+hi2*K(i,i-1)*y(i-1)^2; |
| for j=2:i-1 |
| int=int+hj/2*(K(i,j-1)*y(j-1)^2+Kij*yj^2); |
| end %j |
| hi2*Kii*yi^2-yi+int=0; %quadratic equation for yi |
| yi=(1-\sqrt(1-2*hi*Kii*int))/(hi*Kii); %solution of QE |
| end %i |


 ,
, 





{kind=link}