
A pde-Based Analysis of the Spectrogram Image for Instantaneous Frequency Estimation




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Spectrogram of AM-FM Signals
2.2. The Proposed Method
2.2.1. Estimation Error
2.2.2. Chirp Rate Regularization
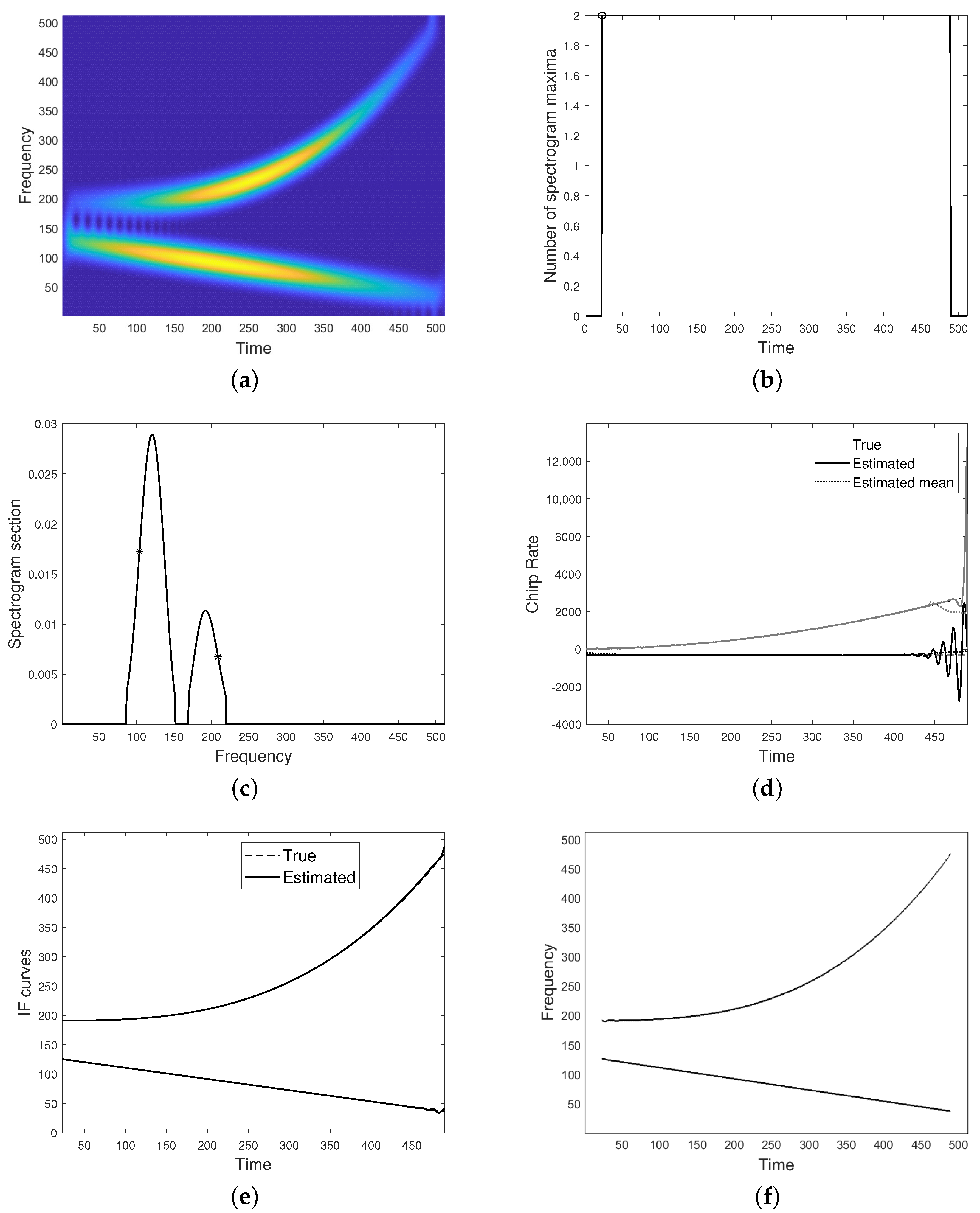
2.2.3. Crossing Point Detection
3. Results and Discussion
Some Remarks
- The proposed method requires two-component signals and prior knowledge of the presence of a non-separability region. A method for detecting the non-separability region, as the one proposed in [65], can be used as a preprocessing step, in case of constant amplitude signals. Furthermore, weakly amplitude modulation is assumed, as in most approaches.
- It is worth underlying that the proposed method could be easily generalized to MCS with modes if the TF non-separability regions are known and they are sufficiently separated. Indeed, under these assumptions, the analysis of a more complex signal reduces to the analysis of a two-component signal locally. This point will be investigated in-depth in future studies.
- The proposed model allows for IFs estimation, up to an integration constant, whose accuracy can affect the final result, as previously shown. However, it is worth pointing out that this error often causes the recovery of a characteristic different from the ridge, but still a characteristic. As a result, it contains significant information concerning IF. The integration constant can be directly estimated from spectrogram ridges belonging to the separability region. Also in this case, a prior TF localization of the non-separability region would solve the problem.
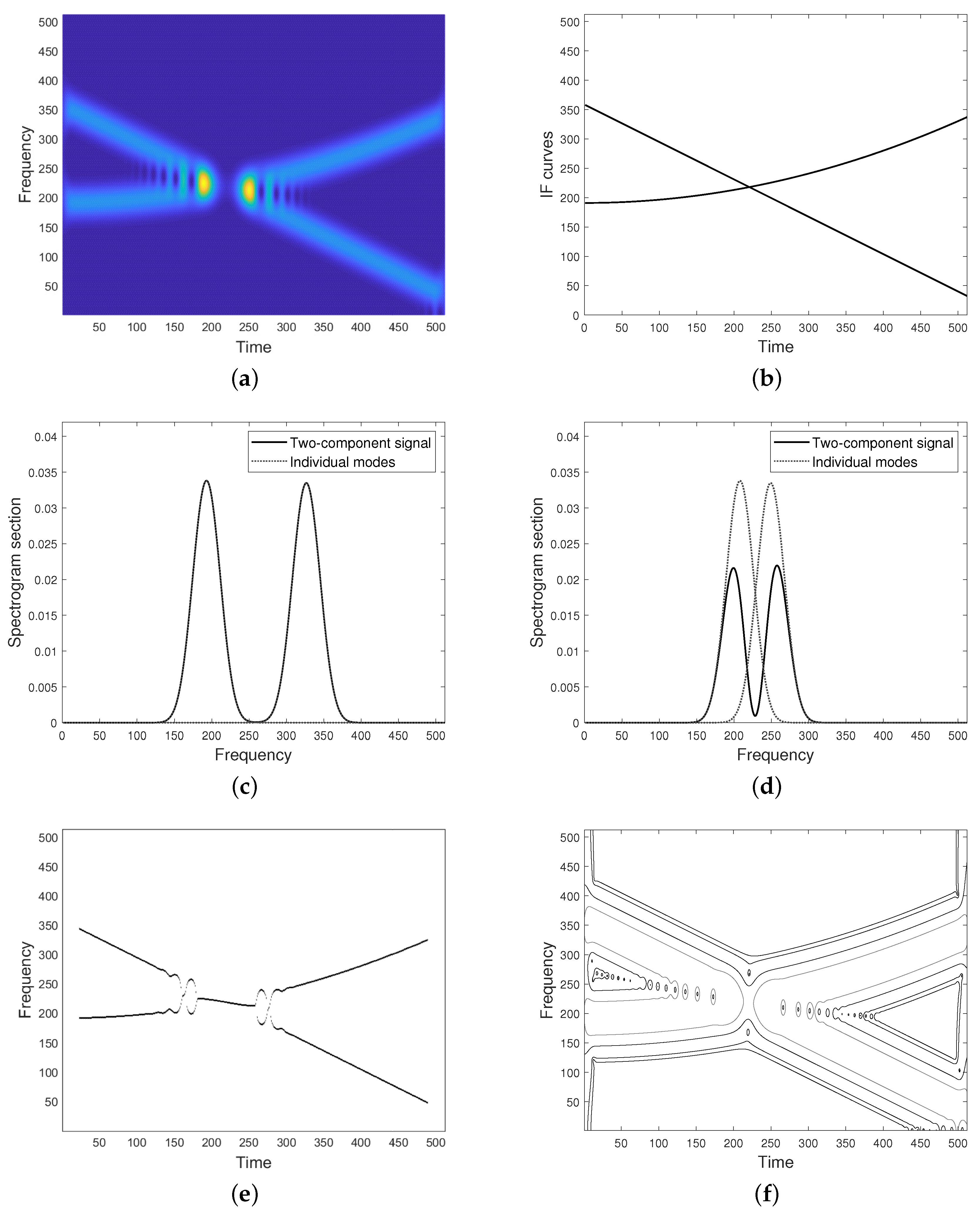
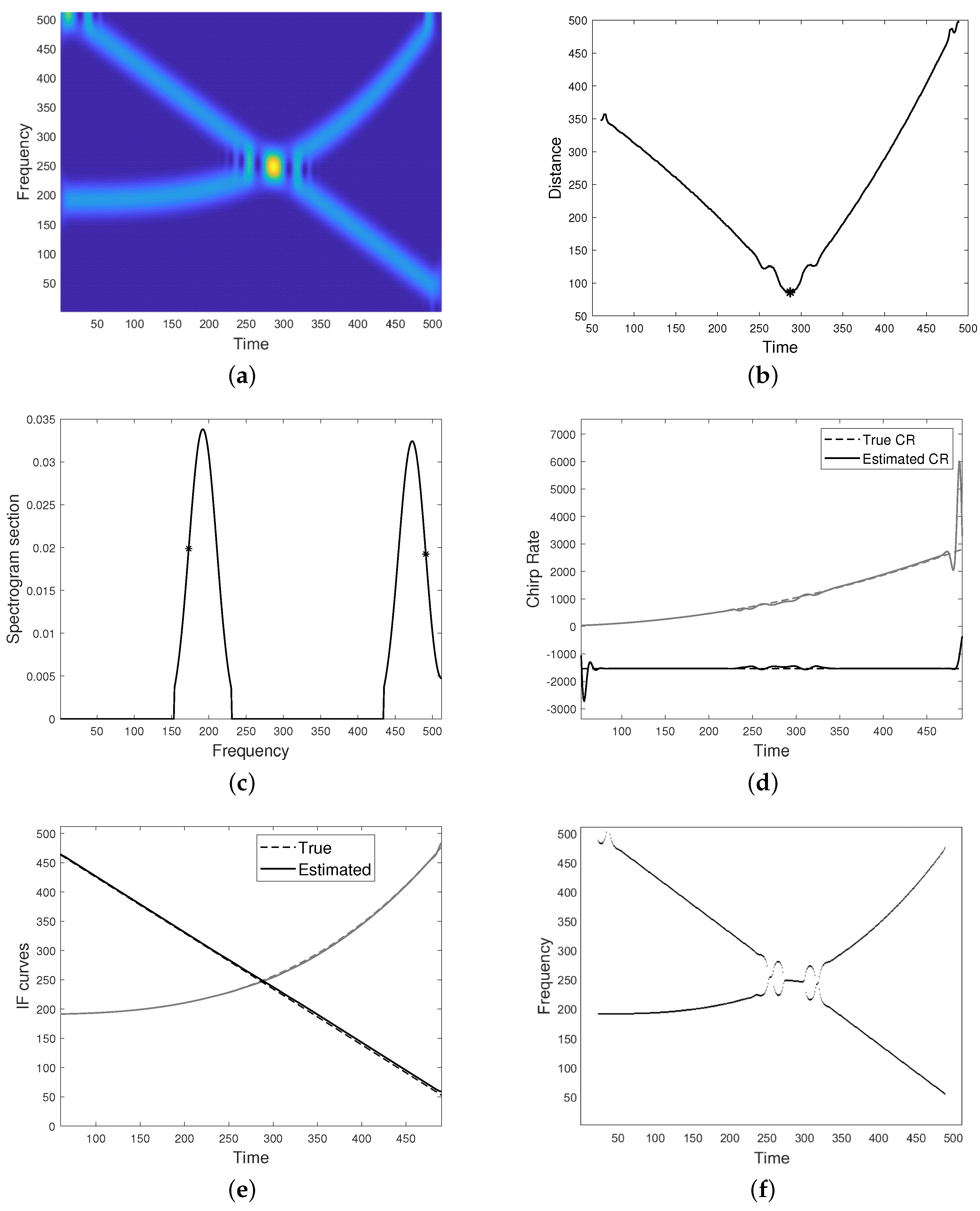
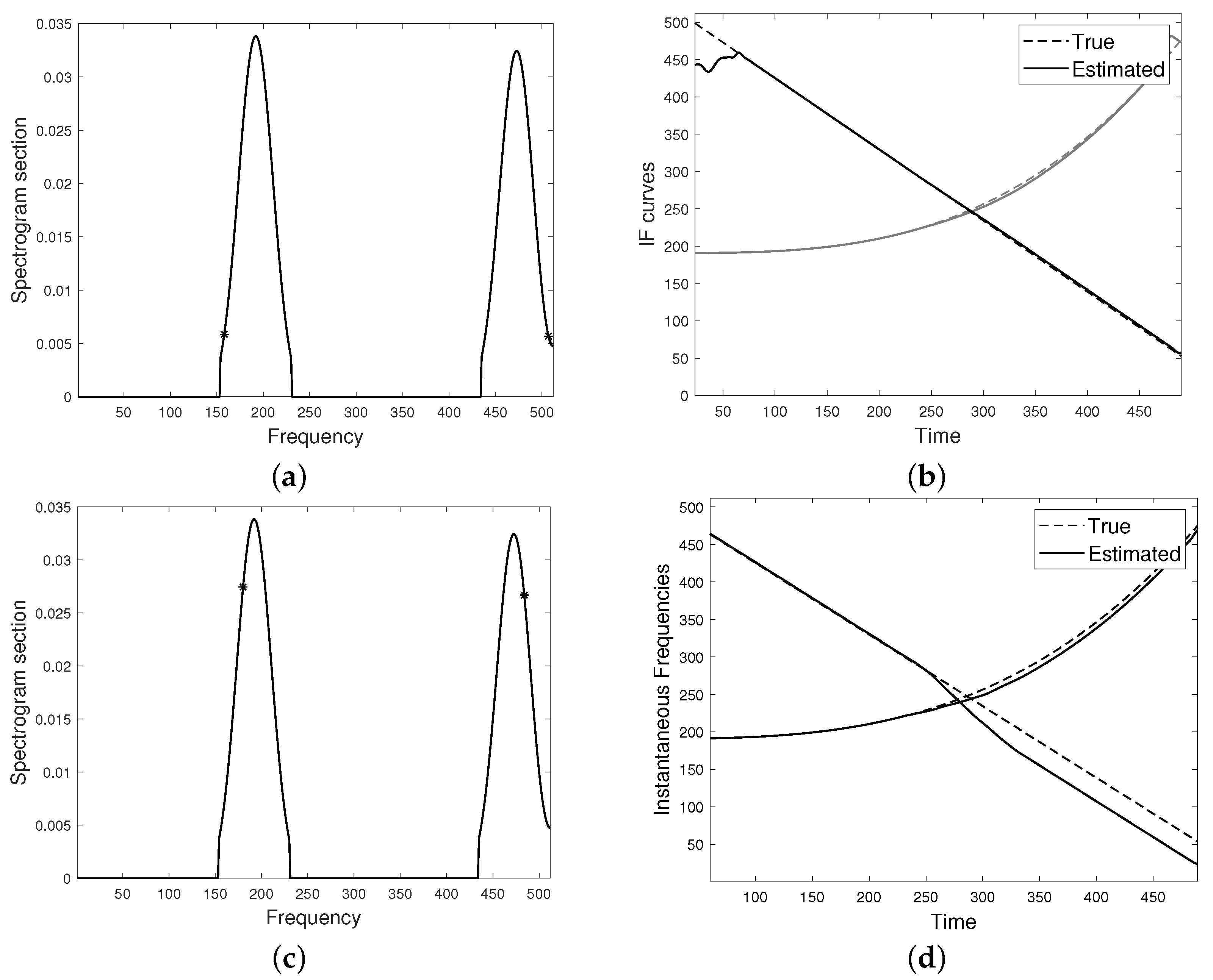
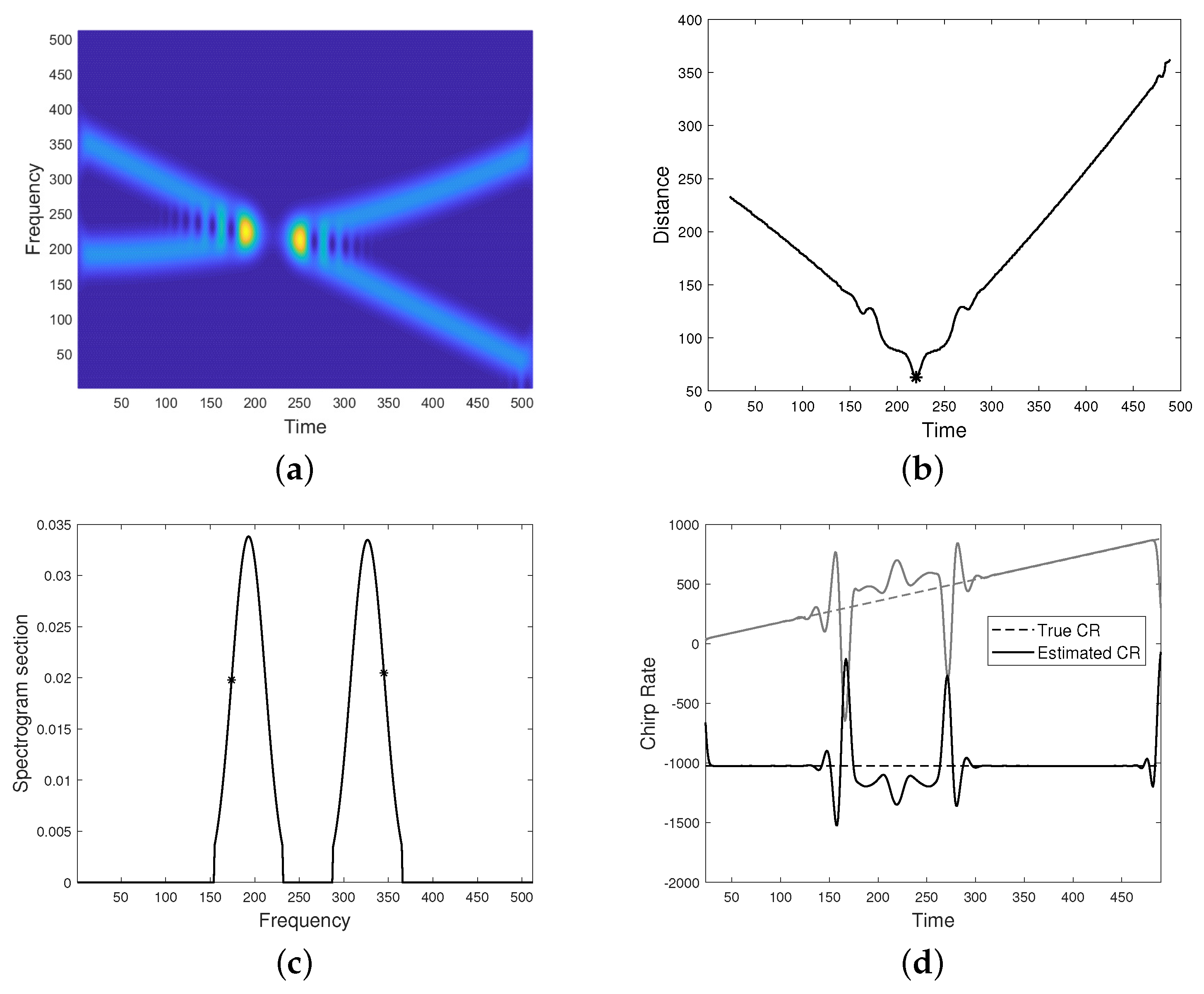
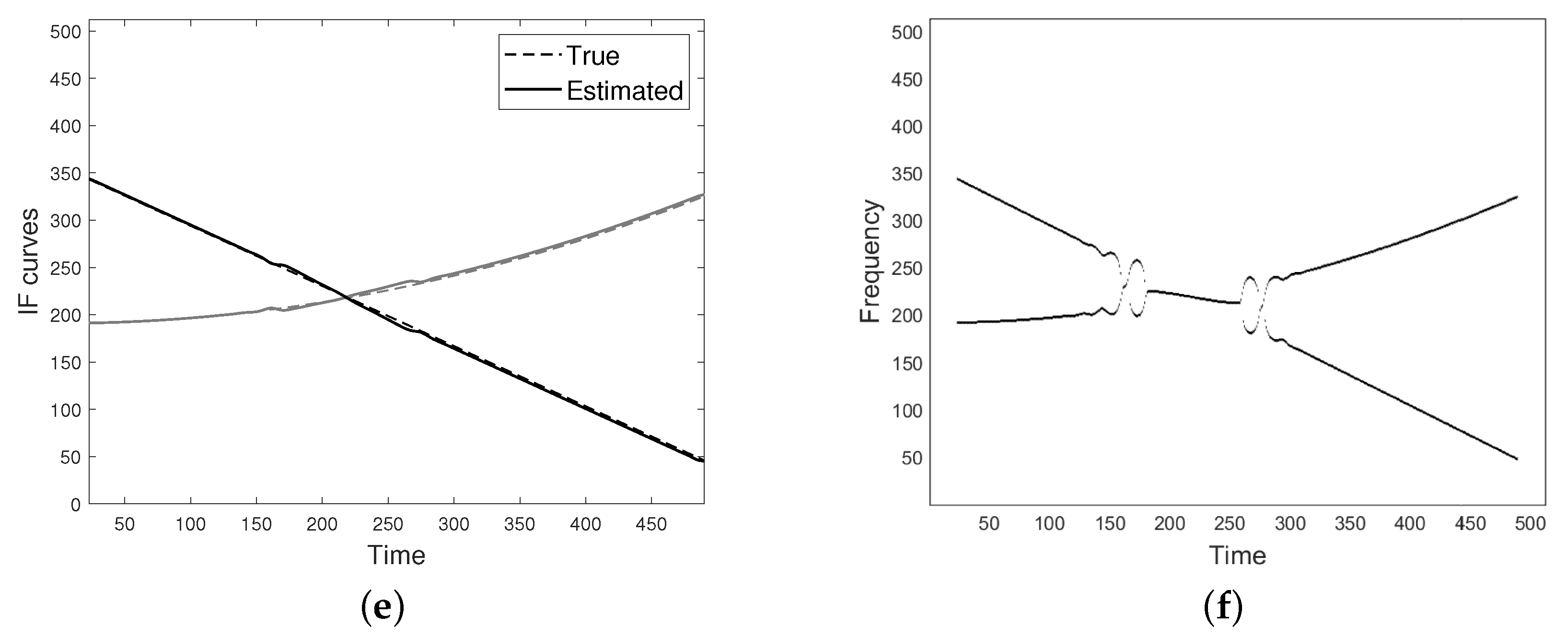
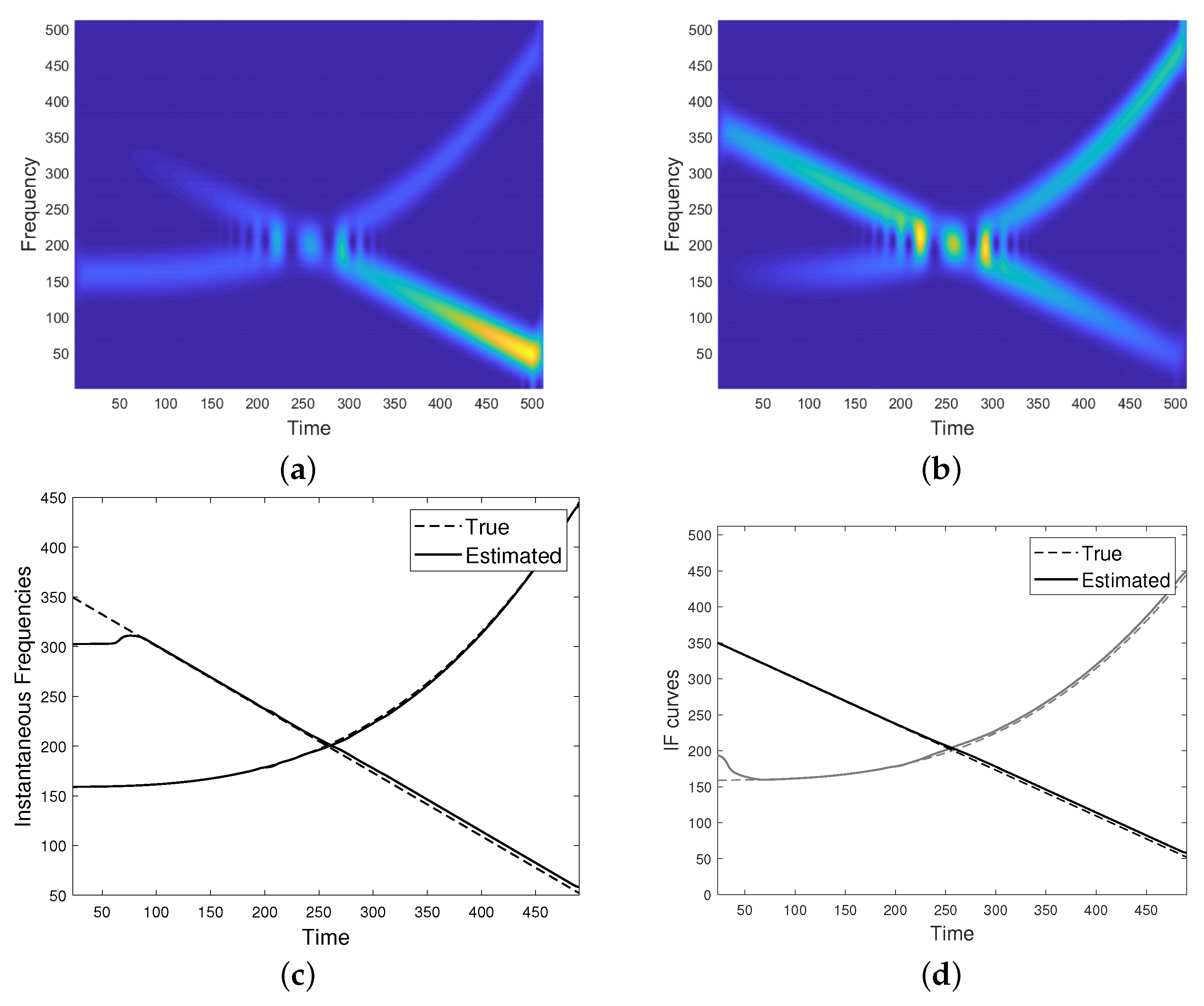
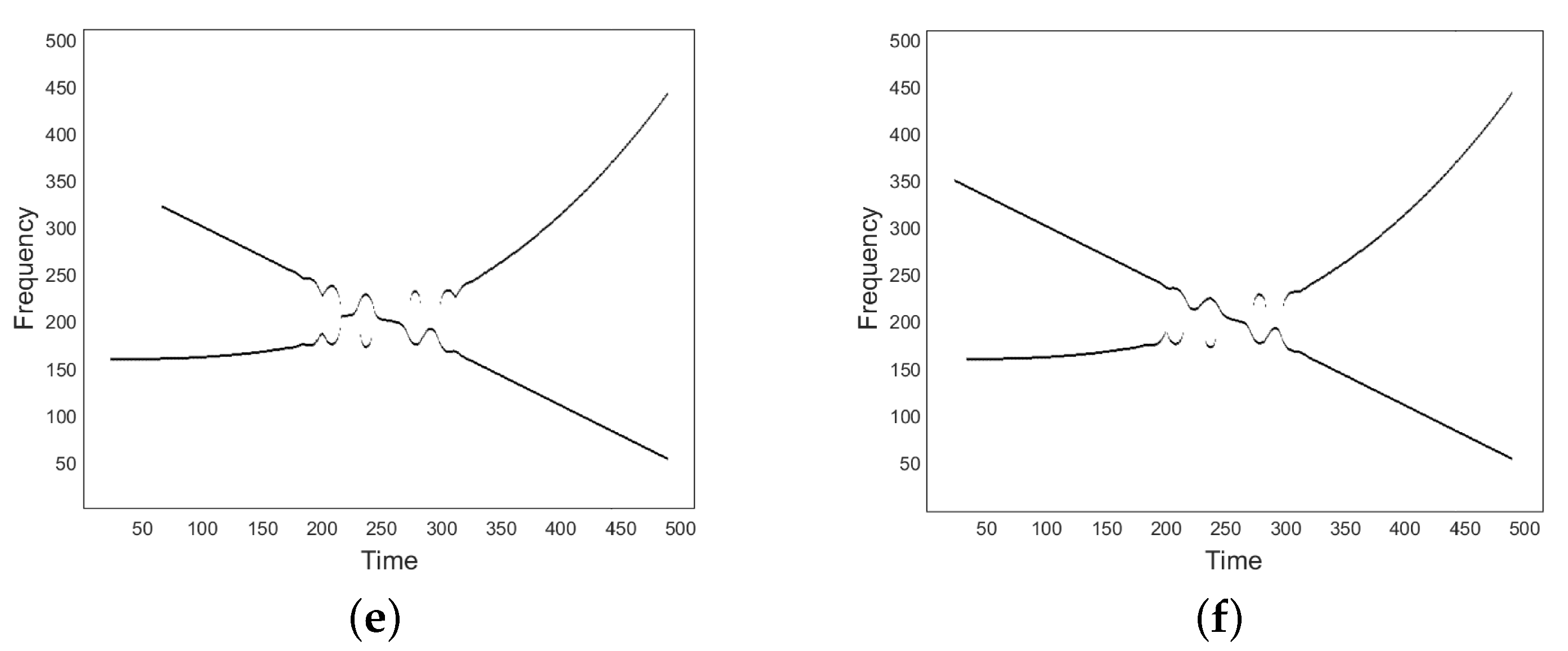
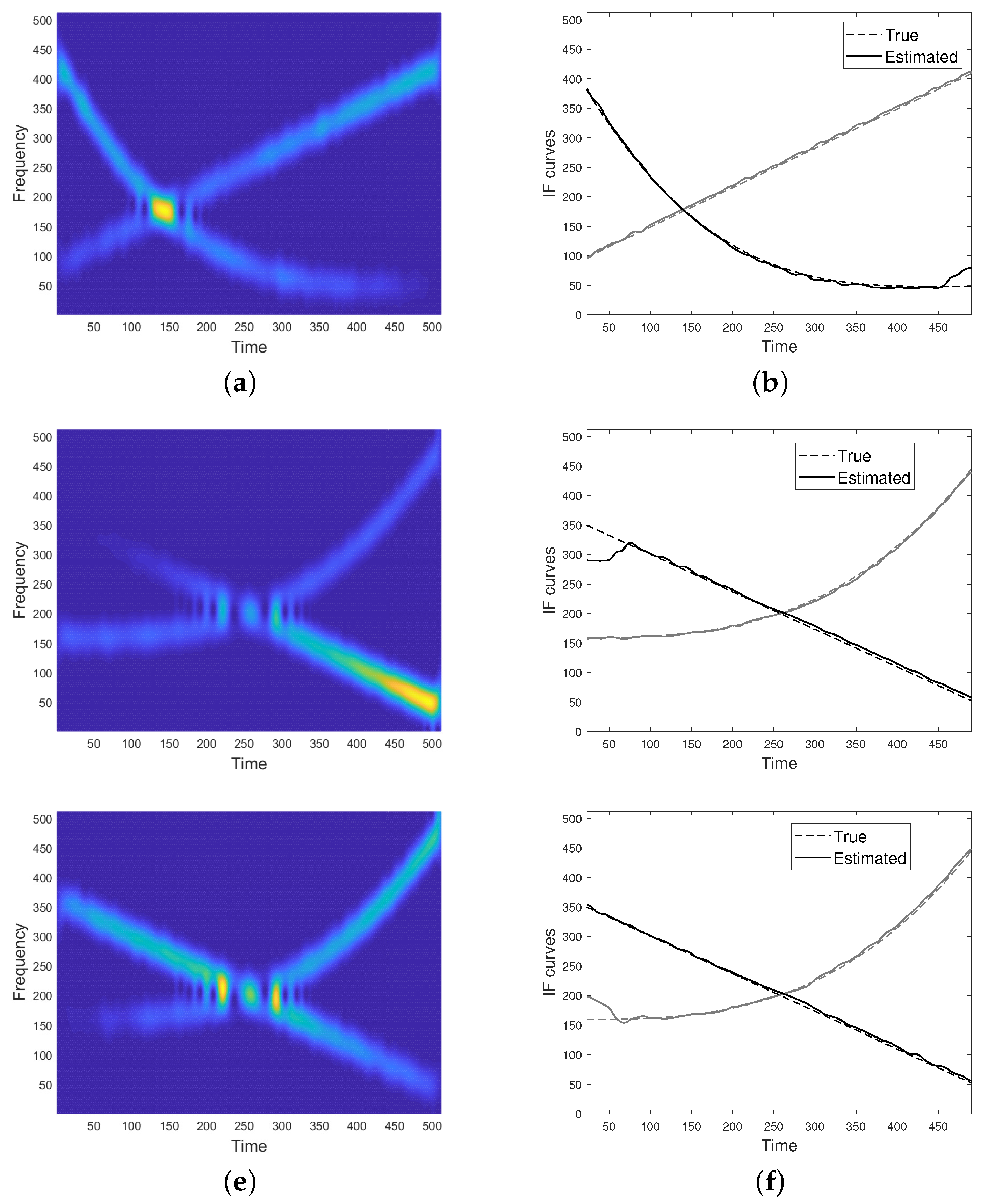
- The proposed procedure requires two frequency points for defining the linear system as in Equation (11), for each fixed u. The sensitivity to their selection has been numerically investigated. As shown in Figure 5 and Figure 6, involving too low characteristic curves can affect the final accuracy due to boundary effects, while characteristic at higher levels are generally more subjected to interference, resulting in inaccurate IFs estimate. For this reason, a good compromise can be achieved by selecting two frequency points close to the one where spectrogram concavity changes, as done in the presented simulations.
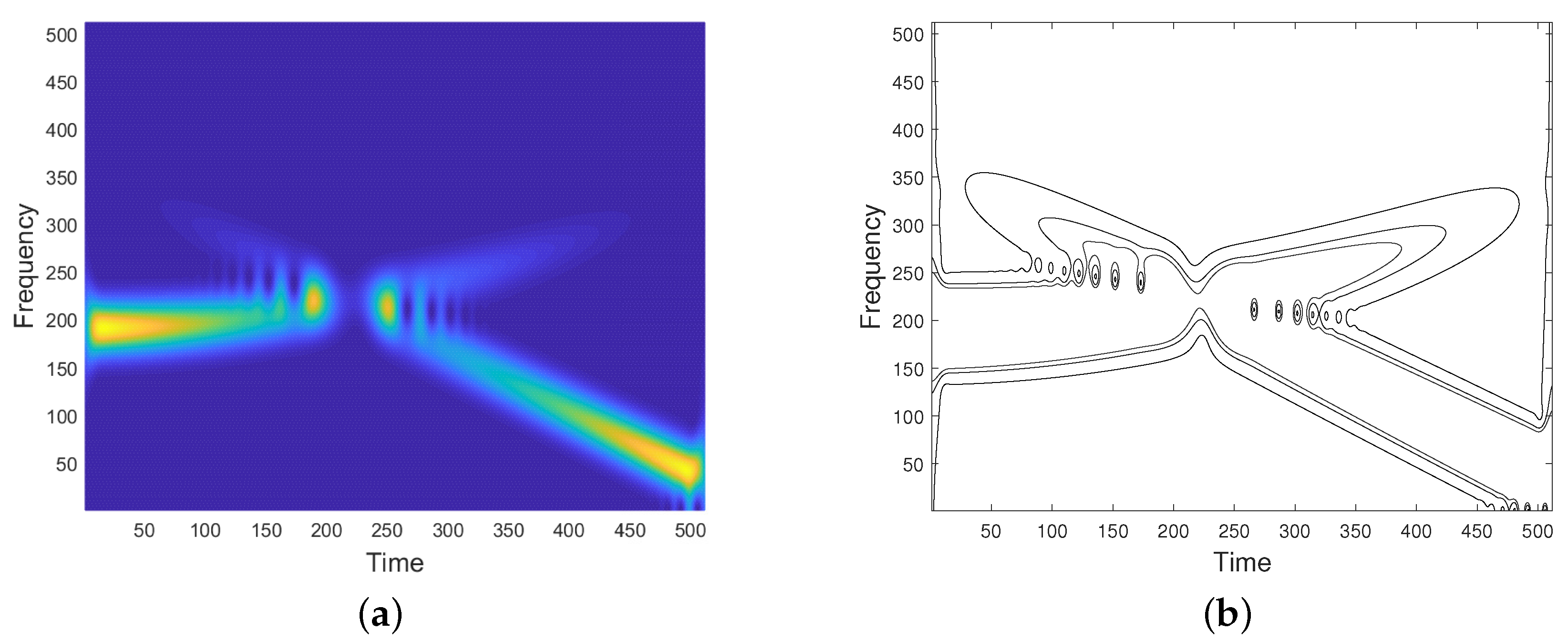
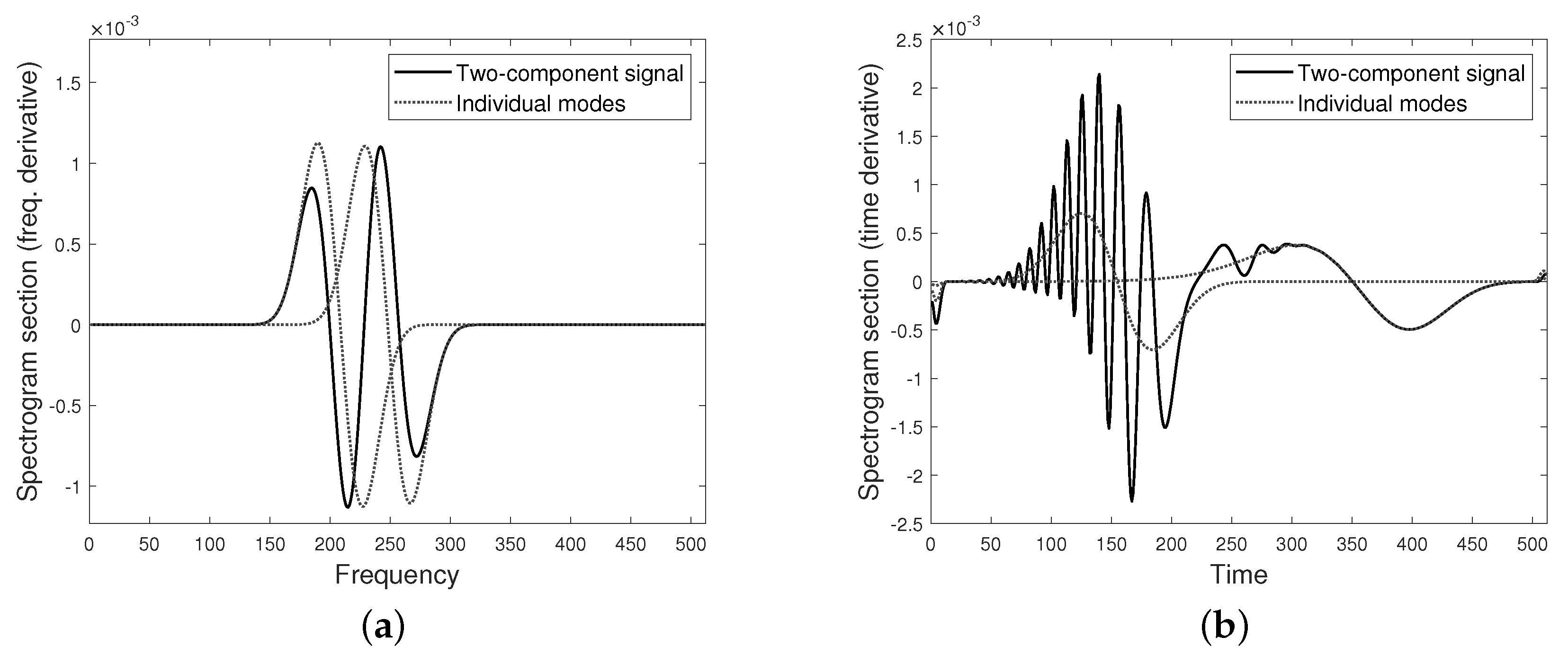
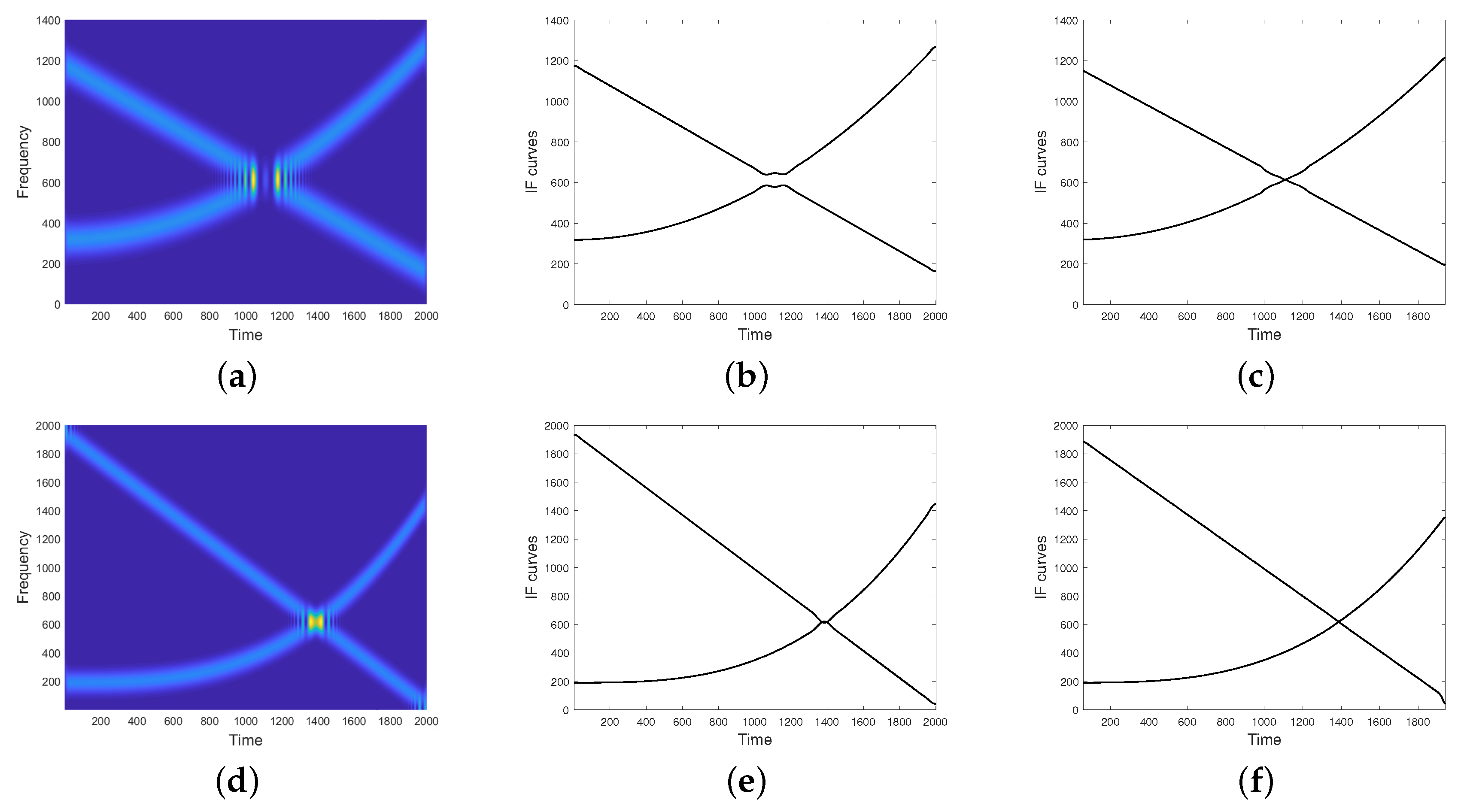
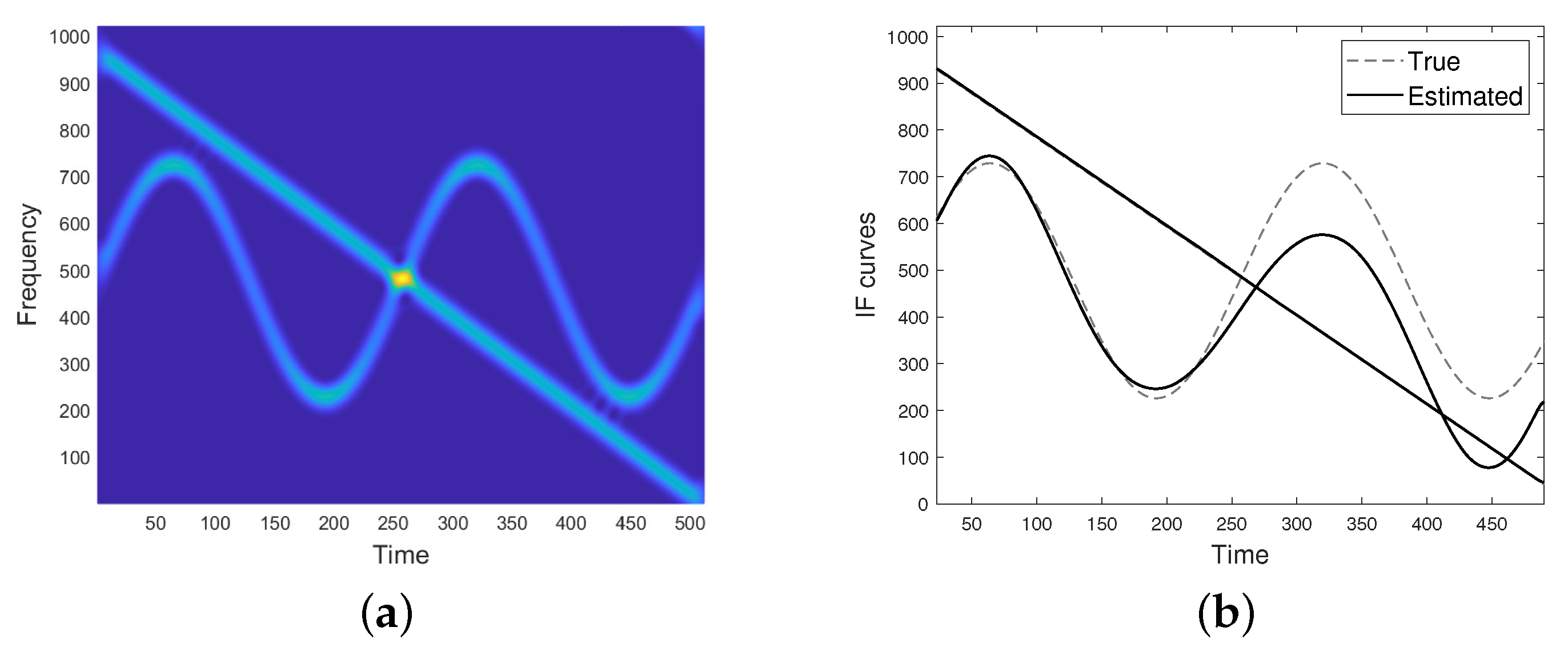
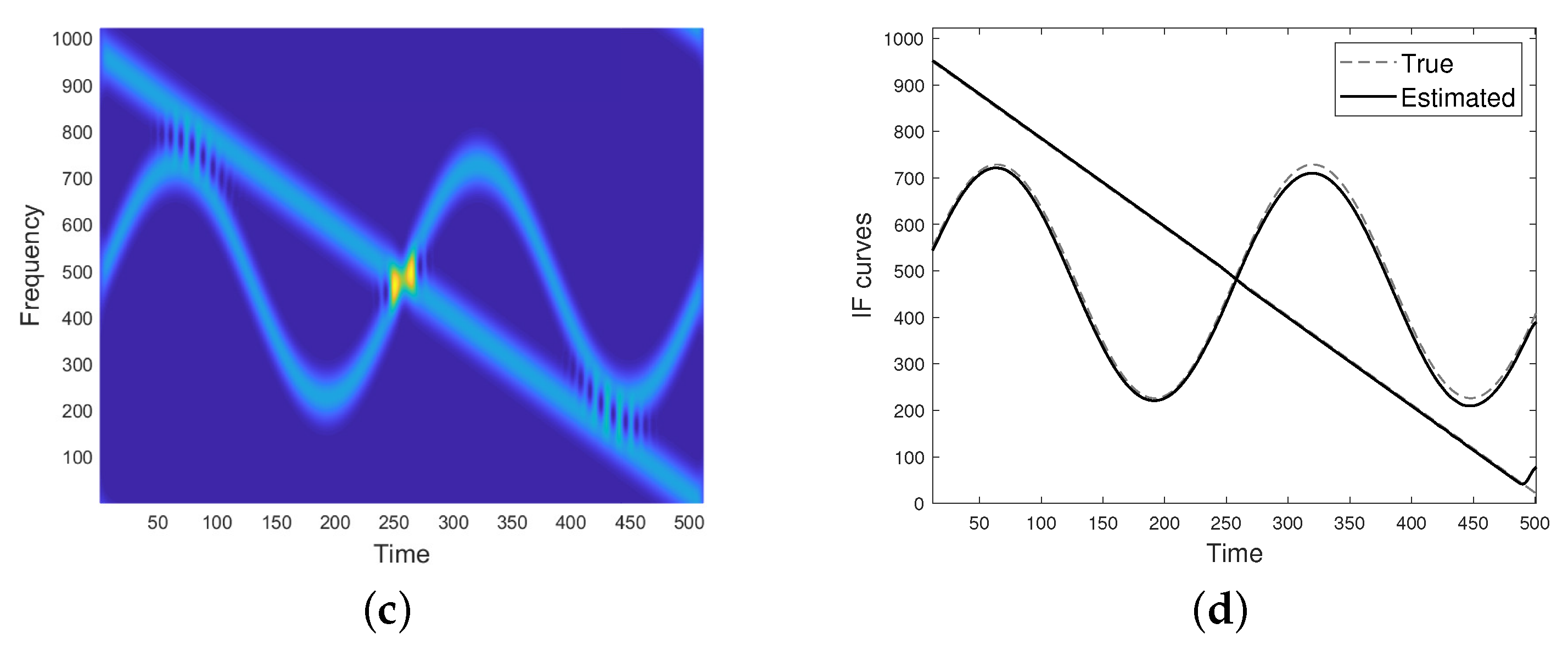
- As shown in the experimental results, the proposed method is robust to additive interference and cross-terms. The presence of spectrogram values close to zero, which occurs in case of strong amplitude modulation as well as destructive interference, could result in instabilities in the derivatives approximation, that can affect the final IFs estimation. However, it is worth highlighting that the proposed approach outperforms the state-of-the-art method in dealing with the critical case of destructive interference, as shown in Figure 7 and Figure 12. In addition, the proposed method has shown robustness to moderate noise.
- Spectrogram is widely used in practical applications because of its simplicity and computational benefit. It is well-known that, in case of MCS, spectrogram of close modes suffers from the presence of cross-terms that can affect each estimation concerning the signal. For this reason, more advanced and adaptive kernels with attenuated cross-terms, such as S-Transform or Locally Adaptive TF distribution, are often preferred in the literature. However, it is worth noticing that many real-life measurements, such as the ones concerning human gait classification and detection, precisely deal with spectrograms. That is why spectrogram processing is still of interest, today. In addition, cross-terms do not represent a limitation for the presented method, but a tool for estimating IF.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AM | Amplitude Modulated |
| CR | Chirp Rate |
| FM | Frequency Modulated |
| IA | Instantaneous Amplitude |
| IF | Instantaneous Frequency |
| MCS | Multicomponent Signal(s) |
| RPRM | Ridge Path Regrouping Method |
| STFT | Short-Time Fourier Transform |
| TF | Time-Frequency |
| TFD | Time-Frequency Distribution |
| WSC | Weakened Separability Condition |
Appendix A
References
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Lyonnet, B.; Ioana, C.; Amin, M.G. Human gait classification using microdoppler time-frequency signal representations. In Proceedings of the 2010 IEEE Radar Conference, Washington, DC, USA, 10–14 May 2010; pp. 915–919. [Google Scholar] [CrossRef]
- Zhang, Q.; Yeo, T.S.; Tan, H.S.; Luo, Y. Imaging of a Moving Target With Rotating Parts Based on the Hough Transform. IEEE Trans. Geosci. Remote Sens. 2008, 46, 291–299. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, D.; Ji, H.; Dai, R. Application of Synchrosqueezed Wavelet Transform in Microseismic Monitoring of Mines. In Proceedings of the 2019 IOP Conference Series: Earth and Environmental Science, Ho Chi Minh City, Vietnam, 25–28 February 2019; IOP Publishing: Bristol, UK, 2019; Volume 384, p. 012075. [Google Scholar] [CrossRef]
- Candes, E.J.; Charlton, P.R.; Helgason, H. Detecting highly oscillatory signals by chirplet path pursuit. Appl. Comput. Harmon. Anal. 2008, 24, 14–40. [Google Scholar] [CrossRef]
- Pham, D.H.; Meignen, S. High-order synchrosqueezing transform for multicomponent signals analysis with an application to gravitational-wave signal. IEEE Trans. Signal Process. 2017, 65, 3168–3178. [Google Scholar] [CrossRef]
- Guillemain, P.; Kronland-Martinet, R. Characterization of acoustic signals through continuous linear time-frequency representations. Proc. IEEE 1996, 84, 561–585. [Google Scholar] [CrossRef]
- Zeng, F.G.; Nie, K.; Stickney, G.S.; Kong, Y.Y.; Vongphoe, M.; Bhargave, A.; Wei, C.; Cao, K. Speech recognition with amplitude and frequency modulations. Proc. Natl. Acad. Sci. USA 2005, 102, 2293–2298. [Google Scholar] [CrossRef]
- Ioana, C.; Gervaise, C.; Stéphan, Y.; Mars, J.I. Analysis of underwater mammal vocalisations using time–frequency-phase tracker. Appl. Acoust. 2010, 71, 1070–1080. [Google Scholar] [CrossRef]
- Wang, G.; Teng, C.; Li, K.; Zhang, Z.; Yan, X. The removal of EOG artifacts from EEG signals using independent component analysis and multivariate empirical mode decomposition. IEEE J. Biomed. Health Inform. 2015, 20, 1301–1308. [Google Scholar] [CrossRef]
- Boashash, B. Time-Frequency Signal Analysis and Processing: A Comprehensive Reference; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Cicone, A. Nonstationary signal decomposition for dummies. In Advances in Mathematical Methods and High Performance Computing; Springer: Berlin/Heidelberg, Germany, 2019; pp. 69–82. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Upadhyay, A.; Sharma, M.; Pachori, R.B.; Sharma, R. A Nonparametric Approach for Multicomponent AM–FM Signal Analysis. Circuits Syst. Signal Process. 2020, 39, 6316–6357. [Google Scholar] [CrossRef]
- Doweck, Y.; Amar, A.; Cohen, I. Joint model order selection and parameter estimation of chirps with harmonic components. IEEE Trans. Signal Process. 2015, 63, 1765–1778. [Google Scholar] [CrossRef]
- Yang, Y.; Dong, X.; Peng, Z.; Zhang, W.; Meng, G. Component extraction for non-stationary multi-component signal using parameterized de-chirping and band-pass filter. IEEE Signal Process. Lett. 2015, 22, 1373–1377. [Google Scholar] [CrossRef]
- Feng, Z.; Chu, F.; Zuo, M.J. Time–frequency analysis of time-varying modulated signals based on improved energy separation by iterative generalized demodulation. J. Sound Vib. 2011, 330, 1225–1243. [Google Scholar] [CrossRef]
- Stankovic, L. Analysis of noise in time-frequency distributions. IEEE Signal Process. Lett. 2002, 9, 286–289. [Google Scholar] [CrossRef]
- Stankovic, L.; Katkovnik, V. The Wigner distribution of noisy signals with adaptive time-frequency varying window. IEEE Trans. Signal Process. 1999, 47, 1099–1108. [Google Scholar] [CrossRef]
- Bouchikhi, A.; Boudraa, A.O.; Cexus, J.C.; Chonavel, T. Analysis of multicomponent LFM signals by Teager Huang-Hough transform. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1222–1233. [Google Scholar] [CrossRef]
- Barbarossa, S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform. IEEE Trans. Signal Process. 1995, 43, 1511–1515. [Google Scholar] [CrossRef]
- Wood, J.C.; Barry, D.T. Radon transformation of time-frequency distributions for analysis of multicomponent signals. IEEE Trans. Signal Process. 1994, 42, 3166–3177. [Google Scholar] [CrossRef]
- Alieva, T.; Bastiaans, M.J.; Stankovic, L. Signal reconstruction from two close fractional Fourier power spectra. IEEE Trans. Signal Process. 2003, 51, 112–123. [Google Scholar] [CrossRef]
- Stankovic, L.; Dakovic, M.; Thayaparan, T.; Popovic-Bugarin, V. Inverse radon transform–based micro-Doppler analysis from a reduced set of observations. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1155–1169. [Google Scholar] [CrossRef]
- Bruni, V.; Tartaglione, M.; Vitulano, D. Radon spectrogram-based approach for automatic IFs separation. EURASIP J. Adv. Signal Process. 2020, 13, 1–21. [Google Scholar] [CrossRef]
- Khan, N.A.; Boashash, B. Multi-component instantaneous frequency estimation using locally adaptive directional time frequency distributions. Int. J. Adapt. Control Signal Process. 2016, 30, 429–442. [Google Scholar] [CrossRef]
- Mohammadi, M.; Pouyan, A.A.; Khan, N.A.; Abolghasemi, V. Locally optimized adaptive directional time–frequency distributions. Circuits Syst. Signal Process. 2018, 37, 3154–3174. [Google Scholar] [CrossRef]
- Carmona, R.A.; Hwang, W.L.; Torresani, B. Characterization of signals by the ridges of their wavelet transform. IEEE Trans. Signal Process. 1997, 45, 2586–2590. [Google Scholar] [CrossRef]
- Carmona, R.; Hwang, W.; Torresani, B. Multiridge detection and time-frequency reconstruction. IEEE Trans. Signal Process. 1999, 47, 480–492. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, Z.; Gao, J.; Li, W. Two robust approaches to multicomponent signal reconstruction from STFT ridges. Mech. Syst. Signal Process. 2019, 115, 720–735. [Google Scholar] [CrossRef]
- Bruni, V.M.S.; Piccoli, B.; Vitulano, D. Instantaneous frequency detection via ridge neighbor tracking. In Proceedings of the 2010 2nd International Workshop on Cognitive Information Processing, Elba, Italy, 14–16 June 2010. [Google Scholar] [CrossRef]
- Rankine, L.; Mesbah, M.; Boashash, B. IF estimation for multicomponent signals using image processing techniques in the time–frequency domain. Signal Process. 2007, 87, 1234–1250. [Google Scholar] [CrossRef]
- Zhang, H.; Bi, G.; Yang, W.; Razul, S.G.; See, C.M.S. IF estimation of FM signals based on time-frequency image. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 326–343. [Google Scholar] [CrossRef]
- Stankovic, L.; Djurovic, I.; Ohsumi, A.; Ijima, H. Instantaneous frequency estimation by using Wigner distribution and Viterbi algorithm. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, Hong Kong, China, 6–10 April 2003; Volume 6, pp. 6–121. [Google Scholar] [CrossRef]
- Djurović, I.; Stanković, L. An algorithm for the Wigner distribution based instantaneous frequency estimation in a high noise environment. Signal Process. 2004, 84, 631–643. [Google Scholar] [CrossRef]
- Khan, N.A.; Mohammadi, M.; Djurović, I. A Modified Viterbi Algorithm-Based IF Estimation Algorithm for Adaptive Directional Time–Frequency Distributions. Circuits Syst. Signal Process. 2019, 38, 2227–2244. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Q.H. IF estimation of overlapped multicomponent signals based on Viterbi algorithm. Circuits Syst. Signal Process. 2020, 39, 3105–3124. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Q.H. An improved Viterbi algorithm for IF extraction of multicomponent signals. Signal Image Video Process. 2018, 12, 171–179. [Google Scholar] [CrossRef]
- Khan, N.A.; Mohammadi, M.; Ali, S. Instantaneous frequency estimation of intersecting and close multi-component signals with varying amplitudes. Signal Image Video Process. 2019, 13, 517–524. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Xing, G.; Peng, Z.; Zhang, W.; Meng, G. Separation of overlapped non-stationary signals by ridge path regrouping and intrinsic chirp component decomposition. IEEE Sens. J. 2017, 5994–6005. [Google Scholar] [CrossRef]
- Dong, X.; Chen, S.; Xing, G.; Peng, Z.; Zhang, W.; Meng, G. Doppler Frequency Estimation by Parameterized Time-Frequency Transform and Phase Compensation Technique. IEEE Sens. J. 2018, 18, 3734–3744. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Peng, Z.; Zhang, W.; Meng, G. Nonlinear chirp mode decomposition: A variational method. IEEE Trans. Signal Process. 2017, 65, 6024–6037. [Google Scholar] [CrossRef]
- Bruni, V.; Marconi, S.; Piccoli, B.; Vitulano, D. Instantaneous frequency estimation of interfering FM signals through time-scale isolevel curves. Signal Process. 2013, 93, 882–896. [Google Scholar] [CrossRef]
- Stanković, L.; Mandić, D.; Daković, M.; Brajović, M. Time-frequency decomposition of multivariate multicomponent signals. Signal Process. 2018, 142, 468–479. [Google Scholar] [CrossRef]
- Ding, Y.; Tang, J. Micro-Doppler trajectory estimation of pedestrians using a continuous-wave radar. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5807–5819. [Google Scholar] [CrossRef]
- Chen, S.; Yang, Y.; Wei, K.; Dong, X.; Peng, Z.; Zhang, W. Time-varying frequency-modulated component extraction based on parameterized demodulation and singular value decomposition. IEEE Trans. Instrum. Meas. 2015, 65, 276–285. [Google Scholar] [CrossRef]
- Yang, Y.; Peng, Z.; Dong, X.; Zhang, W.; Meng, G. Application of parameterized time-frequency analysis on multicomponent frequency modulated signals. IEEE Trans. Instrum. Meas. 2014, 63, 3169–3180. [Google Scholar] [CrossRef]
- Ioana, C.; Jarrot, A.; Gervaise, C.; Stéphan, Y.; Quinquis, A. Localization in underwater dispersive channels using the time-frequency-phase continuity of signals. IEEE Trans. Signal Process. 2010, 58, 4093–4107. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Yang, Y.; Zhang, W.; Peng, Z.; Meng, G. Chirplet path fusion for the analysis of time-varying frequency-modulated signals. IEEE Trans. Ind. Electron. 2016, 64, 1370–1380. [Google Scholar] [CrossRef]
- Swärd, J.; Brynolfsson, J.; Jakobsson, A.; Hansson-Sandsten, M. Sparse semi-parametric estimation of harmonic chirp signals. IEEE Trans. Signal Process. 2015, 64, 1798–1807. [Google Scholar] [CrossRef]
- Djurović, I.; Simeunović, M.; Wang, P. Cubic phase function: A simple solution to polynomial phase signal analysis. Signal Process. 2017, 135, 48–66. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, Z.; Zhang, H.; Gao, J.; Li, B. Generalized Ridge Reconstruction Approaches Toward more Accurate Signal Estimate. Circuits Syst. Signal Process. 2019, 1–26. [Google Scholar] [CrossRef]
- Auger, F.; Flandrin, P.; Lin, Y.-T.; McLaughlin, S.; Meignen, S.; Oberlin, T.; Wu, H.-T. Time-Frequency reassignment and synchrosqueezing: An overview. IEEE Signal Process. Mag. 2013, 30, 32–41. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef]
- Daubechies, I.; Wang, Y.; Wu, H. ConceFT: Concentration of frequency and time via a multitapered synchrosqueezed transform. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 374, 20150193. [Google Scholar] [CrossRef] [PubMed]
- Yu, G.; Yu, M.; Xu, C. Synchroextracting transform. IEEE Trans. Aerosp. Electron. Syst. 2017, 64, 8042–8054. [Google Scholar] [CrossRef]
- Zhu, X.; Yang, H.; Zhang, Z.; Gao, J.; Liu, N. Frequency-chirprate reassignment. Digit. Signal Process. 2020, 102783. [Google Scholar] [CrossRef]
- Bruni, V.; Tartaglione, M.; Vitulano, D. A fast and robust spectrogram reassignment method. Mathematics 2019, 7, 358. [Google Scholar] [CrossRef]
- Bruni, V.; Tartaglione, M.; Vitulano, D. An iterative approach for spectrogram reassignment of frequency modulated multicomponent signals. Math. Comput. Simul. 2020, 176, 96–119. [Google Scholar] [CrossRef]
- Mallat, S. A Wavelet Tour of Signal Processing; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Bruni, V.; Tartaglione, M.; Vitulano, D. A Signal Complexity-Based Approach for AM–FM Signal Modes Counting. Mathematics 2020, 8, 2170. [Google Scholar] [CrossRef]
- Variational Nonlinear Chirp Mode Decomposition. Available online: https://www.mathworks.com/matlabcentral/fileexchange/64292-variational-nonlinear-chirp-mode-decomposition (accessed on 2 December 2020).
- Bruni, V.; Della Cioppa, L.; Vitulano, D. A Multiscale Energy-Based Time-Domain Approach for Interference Detection in Non-stationary Signals. In International Conference on Image Analysis and Recognition; Springer: Berlin/Heidelberg Germany, 2020; pp. 36–47. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bruni, V.; Tartaglione, M.; Vitulano, D. A pde-Based Analysis of the Spectrogram Image for Instantaneous Frequency Estimation. Mathematics 2021, 9, 247. https://doi.org/10.3390/math9030247
Bruni V, Tartaglione M, Vitulano D. A pde-Based Analysis of the Spectrogram Image for Instantaneous Frequency Estimation. Mathematics. 2021; 9(3):247. https://doi.org/10.3390/math9030247
Chicago/Turabian StyleBruni, Vittoria, Michela Tartaglione, and Domenico Vitulano. 2021. "A pde-Based Analysis of the Spectrogram Image for Instantaneous Frequency Estimation" Mathematics 9, no. 3: 247. https://doi.org/10.3390/math9030247
APA StyleBruni, V., Tartaglione, M., & Vitulano, D. (2021). A pde-Based Analysis of the Spectrogram Image for Instantaneous Frequency Estimation. Mathematics, 9(3), 247. https://doi.org/10.3390/math9030247