1. Introduction
Queueing models with negative arrivals have been studied extensively over the last decades, owing to their applicability in the performance analysis of a wide range of systems, such as computers, telecommunication systems and manufacturing systems. The basic version of such models, known as the G-queue, is due to Gelenbe [
1] and considers the notion of a negative customer that, upon arrival, removes one ordinary (or positive) customer from the queueing system according to some killing strategy, such as the removal of the customer in service or the removal of the customer that arrived most recently, if any. Another type of negative arrival, introduced by Towsley and Tripathi [
2], is disasters that upon occurrence result in the simultaneous removal of all customers from the queueing system. As such, queueing models with disasters can be used to evaluate the impact of a machine breakdown in a production system, a system reset in a service facility or a virus infection affecting a computer system. Queues with disasters are also referred to in the literature as queues with mass exodus, catastrophes, queue flushing or stochastic clearing [
3].
In this paper, our focus is on queueing models with disasters in the discrete-time domain, which have so far been analyzed to a lesser extent than their continuous-time counterparts. The first study [
3] on discrete-time queues with disasters considered the Geo/Geo/1 queueing model with a Bernoulli distribution of the number of customer arrivals per slot and geometric service times under the impact of Bernoulli disasters. A similar disaster model was used in [
4] to model the behavior of an email contact center. A transient analysis of the system content in the Geo/Geo/1 disaster model was performed in [
5]. The extension to a discrete-time Geo/G/1 disaster model with Bernoulli arrivals and general independent service times was considered in [
6] (system content) and [
7,
8] (sojourn time). The Geo/G/1 disaster model was also analyzed in [
9] under an N-policy operation and in [
10,
11,
12] under repair times after a disaster. The queue length and sojourn time in a G/Geo/1 disaster queue with general independent interarrival times between customers and, at most, 1 customer arrival per slot were investigated in [
13], while disaster queues with bursty Bernoulli arrivals and geometric service times were considered in [
14,
15].
Our current work further extends the existing results in the literature to a discrete-time disaster model, where general probability distributions are allowed for both the number of customer arrivals during a slot and the length of a customer service time. We present a full queueing analysis of this queueing model with disasters and derive expressions for the probability generating functions as well as the mean values, variances and tail probabilities of both the system content and the sojourn time under a first-come-first-served (FCFS) policy.
For related work on discrete-time G-queues with negative customers, the reader is referred to [
3,
7,
14,
16,
17,
18,
19,
20,
21,
22,
23]. For work on continuous-time queueing models with negative customers and/or disasters, we refer to the bibliography in [
24,
25] and the more recent papers [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36]. Additionally, somewhat related to this paper in the sense that customers may leave the system before their service is completed are queueing models with customer impatience or deadlines; we refer to [
37] and the references therein for an overview of such models.
The paper is organized as follows. The specific assumptions of the considered queueing model are detailed in
Section 2. In
Section 3, system equations are established that describe the evolution of the state of the queueing system from slot to slot. Based on these system equations, an expression for the steady-state joint probability generating function (pgf) of the system state variables is obtained in
Section 4 in terms of the unknown probability of having an empty system. A technique to calculate this remaining unknown is presented in
Section 5, together with the analysis of the main characteristics of the system content.
Section 6 then derives the pgf of the unfinished work in the system, as an intermediate step for the analysis of the characteristics of the sojourn time in
Section 7. The customer loss probability due to a disaster occurrence is derived in
Section 8. Some numerical examples to illustrate the analysis are given in
Section 9, before the paper is concluded in
Section 10.
2. Queueing Model
We consider a discrete-time queueing system with one server and an infinite waiting room for customers. The time axis is divided into fixed-length slots. New customers arrive at the system in a stochastic way, according to a general independent arrival process, i.e., the numbers of customers arriving during the consecutive slots are assumed to be independent and identically distributed (i.i.d.) discrete random variables. Their common probability mass function (pmf) is indicated as
with corresponding pgf
The mean arrival rate, i.e., the mean number of customer arrivals during a slot, is given by
The service of a customer is assumed to require a positive integer number of slots and can start or end at slot boundaries only. More specifically, the service times of the customers are assumed to constitute a sequence of i.i.d. positive discrete random variables with common pmf
corresponding pgf
and mean service time
where
is the so-called mean service rate, i.e., the mean number of customers that can be served per slot. The service times are also assumed to be independent of the random variables used in the description of the arrival process.
The queueing system is subject to so-called independent Bernoulli disasters, i.e., during any slot, either a disaster occurs with probability () or no disaster occurs with probability , independently from slot to slot. When such a disaster occurs during a slot, all customers in the system as well as all new arrivals during the slot get lost. In the sequel, we specifically consider that in case of a disaster, all customers are removed from the system at the end of the disaster slot, thus leaving the system empty at the end of that slot.
3. System Equations
Let the random variable denote the system content, i.e., the total number of customers in the system, at the beginning of slot k. Let be the number of customer arrivals during slot k, and let indicate the number of disasters occurring during slot k. Clearly, to describe the evolution of the system content from slot k to slot , some information is also needed about the still remaining part of the service time of the customer in service, if any, at the beginning of slot k. We therefore define the random variable as follows: denotes the remaining number of slots needed to complete the service of the customer currently in service at the beginning of slot k, if , and if . Note that this definition implies that if and only if . Similarly, if and only if . Finally, we let indicate the service time of the next customer to receive service at the beginning of slot k.
With these definitions, the behavior of the queueing system is then characterized by the following system equations:
Equations (
1)–(
7) are based on the following observations. If there is a disaster in slot
k, all customers (including new arrivals during slot
k) are removed from the system, so we have an empty system at the beginning of slot
. In case no disaster occurs during slot
k and the system is empty at the beginning of slot
k, then at the beginning of slot
, the system only contains the new arrivals during slot
k, and, if any, one of these new arrivals are taken into service. If
and there is no disaster in slot
k, the customer in service leaves the system at the end of slot
k; moreover, the service of a new customer starts at the beginning of slot
unless the system has become empty. Finally, if
and there is no disaster in slot
k, no customer leaves the system at the end of slot
k, and the remaining service time of the customer in service decreases by one slot.
It is obvious from the system equations that knowledge of the values of and suffices to determine the joint probability distribution of and . The sequence of pairs , therefore, forms a two-dimensional first-order Markov chain and the state of the queueing system in slot k is fully characterized by the pair .
4. Queueing Analysis
By means of the system Equations (
1)–(
7), we can now analyze the queueing behavior. To do so, we first define
as the joint pgf of the state vector
at the beginning of slot
k:
where the operator
indicates the expected value of the random expression between the square brackets.
The next step in our analysis is then to derive a relationship between the pgfs
and
of the state vectors at the beginning of two consecutive slots. Using Equations (
1)–(
7), we write the function
as
Note that the system state variables
and
are statistically independent of the variables
,
and
due to the uncorrelated nature of both the customer arrival process and the occurrence of disasters from slot to slot and the i.i.d. nature of the service times of the customers. This allows us to further rewrite
as follows:
Using the property that
and the law of total expectation, we then obtain
Let us now define the function
as
such that
. Then we finally find the following relationship between
and
:
Since we are interested in the steady-state behavior of the queueing system, we let the time index
k go to
∞. In steady state (for
), the pgfs
and
both converge to a common limiting function
Note that due to the possible occurrence of disasters (
), such a steady state will always exist. Equation (
12) then leads to a linear equation for
with the following solution:
where
It now remains to determine the unknown function
and the two unknown probabilities
and
. This can be done as follows. First note that, due to the fact that
if and only if
, the following property holds:
In particular, this means that
as obtained from (
14) should equal
, which leads to the following relationship between
and
:
Next, we notice that the pgf
must be bounded for all values of its arguments
x and
z such that
and
. In particular, this should be true for
and
, since
for all such
z, as
is a pgf. If we now choose
in Equation (
14), where
, it is clear that the denominator of
vanishes. Of course, the numerator of
in (
14) must then also be equal to zero for
with
. This requirement together with the relation (
15) then leads to the following equation for
:
From (
14) together with Equations (
15) and (
16), an expression for
can then be derived in terms of the single unknown probability
:
The classical approach to determine the final remaining unknown would now be to express the normalization condition for the joint distribution of the state vector. However, in our case it turns out that , irrespective of the value of . So, a different approach is needed to obtain , which is presented in the next section. Once is determined and, hence, the joint probability generating function is fully known, all main performance measures of the queueing system (namely the moments and tail probabilities of the system content and the sojourn time as well as the customer loss probability) can be derived directly from the function , i.e., without any need for inversion of this joint pgf or calculation of joint probabilities. The methodology is explained in the next sections.
5. System Content
The pgf
of the system content
u observed at the beginning of a random slot in the steady state can be obtained from
by simply putting
:
. After rearranging some terms, we obtain
We can now find the unknown
by noting that the function
, as a pgf, must be bounded for all
z with
. Using Rouché’s theorem, it can be shown (see
Appendix A, Property A1) that the factor
in the denominator of
in (
18) has exactly one zero inside the unit circle in the complex
z-plane. Let us denote this zero by
. It satisfies the following equation:
Clearly, the zero
of the denominator must then also be a zero of the numerator of
. This property then yields the following linear equation for
:
where we also use Equation (
19). Since
and under the assumption that
, the probability
then directly follows from (
20) as
It is worth noting here that in view of (
19),
is only possible in the case that
. In such a case, new arrivals occur in each slot and the system can only be empty at the beginning of a slot if there is a disaster during the previous slot, so
. The latter is, in fact, in full agreement with the result (
21), so the expression (
21) for
turns out to be generally valid. The value of
in this expression for
needs to be determined numerically from (
19), e.g., by means of Newton–Raphson’s method.
Based on the pgf , the moments and tail probabilities of the system content can now be derived, as explained below.
5.1. Mean and Variance of the System Content
In general, any moment of the system-content distribution can be obtained by expressing the desired moment of
u as a function of the consecutive derivatives of the pgf
with respect to
z for
. Here, we give the results obtained from Equation (
18) for the mean value
and the variance
of the system content:
and
5.2. Tail Distribution of the System Content
Another important characteristic is the tail distribution of the system content. We use here an approximation technique as described, for example, in [
38]. Specifically, from the inversion formula for
z-transforms, it follows that the pmf of the system content can be expressed as a weighted sum of negative
nth powers of the poles of the pgf
. Since all these poles have a modulus larger than 1, it is clear that for
n sufficiently large,
is dominated by the contribution of the pole having the smallest modulus. It can be argued (see, for example, [
38]) that this dominant pole must be real and positive to ensure that the tail probabilities are non-negative anywhere. Moreover, it can be shown (see
Appendix A, Property A2) that the dominant pole of
has multiplicity 1. As such,
can be approximated as
for large
n, where
is the dominant pole of
and
is the residue of
in the point
. From the expression (
18) for
, it follows (see
Appendix A, Property A2) that
is the unique real root larger than 1 of the equation
Note that
and
are roots of the same equation; see also (
19). The value of
can be calculated numerically from (
25) via the Newton–Raphson procedure. The residue
can be calculated as
7. Sojourn Time
We define the sojourn time of a customer as the total (integer) number of slots between the end of the arrival slot of the customer and the departure instant of the customer from the system. In this section, we analyze the sojourn time of an arbitrary customer under the assumption of a FCFS queueing discipline.
Let us consider an arbitrary customer, say customer
C, that arrives in the system during some slot in the steady state, referred to as slot
I. Let
t with pgf
denote the sojourn time of
C. To derive
, we use a two-step approach. Firstly, we focus on the number of slots
that
C would spend in the system until its service is completed in case no disasters occur while
C is in the system. Note that, due to the occurrence of disasters,
C can actually be removed from the system before its service is completed, so
is an upper bound on the actual sojourn time
t of
C. If we define
as the unfinished work observed at the beginning of slot
I and
f as the number of customers arriving during slot
I before customer
C, then the maximum sojourn time
is expressed as follows:
where
denotes
and the variables
are the service times of
C and the customers arriving during slot
I and to be served before
C. The pgf
of
f is known to be given by (see, for example, [
39])
Moreover, due to the uncorrelated nature of the arrival process from slot to slot,
has the same pgf
as the unfinished work at the beginning of an arbitrary slot and the variables
and
f are statistically independent. The variables
are i.i.d. with common pgf
. Translating (
30) to pgfs, we then find
or, using Equations (
29) and (
31),
Secondly, we note that for a given value of
, the actual sojourn time
t of
C cannot be larger than
, and its specific value depends on the occurrence process of disasters. In particular, in view of the independent Bernoulli nature of the disaster process, it can be shown that the conditional pmf of
t, given that
, equals
Indeed, the sojourn time
t is zero if a disaster occurs during slot
I. For
, the variable
t takes a value
n if there are no disasters in slot
I nor in the
slots following slot
I, and a disaster occurs in the
nth slot after slot
I. Finally, as long as there are no disasters in slot
I or in the
slots after slot
I, the customer spends the maximum number of
i slots in the system. Using the above conditional pmf (
34) and the law of total expectation, the pgf
of
t is then found as
The combination of Equations (
33) and (
35) finally leads to the following expression for
:
7.1. Mean and Variance of the Sojourn Time
Based on the moment-generating property of pgfs, the following expressions for the mean value and the variance of the sojourn time are obtained from the pgf
:
and
It was also verified that the above result for is in full agreement with Little’s law: .
7.2. Tail Distribution of the Sojourn Time
Similar to
Section 5.2, we use a dominant-pole approximation for the tail distribution of the sojourn time. The pmf
is approximated by the following geometric form:
for
n that is sufficiently large. It can be proved (see
Appendix A, Property A3) that the dominant pole
of
is the unique real root larger than
with multiplicity 1 of the equation
The residue
then follows from (
36) as
9. Numerical Examples
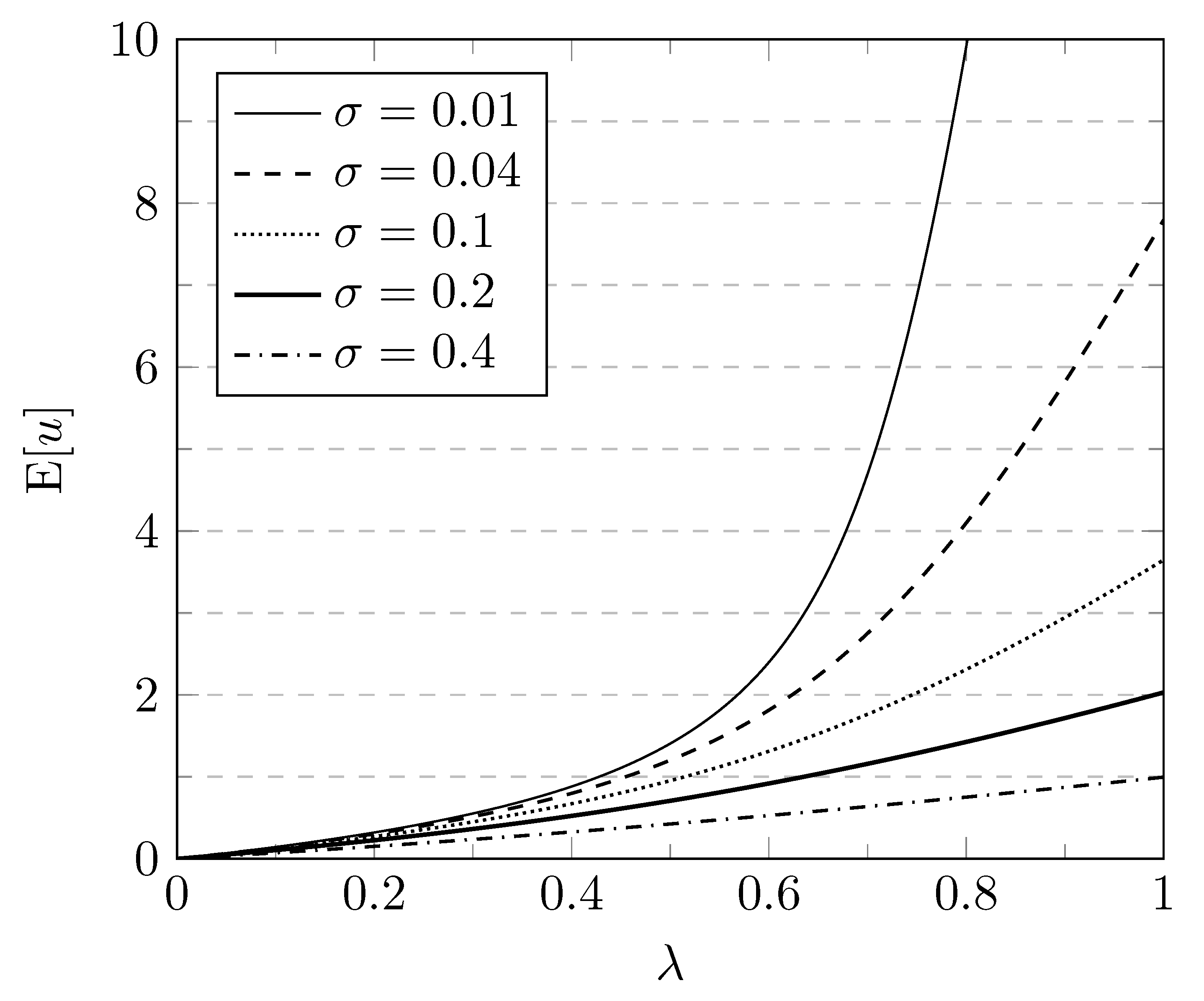
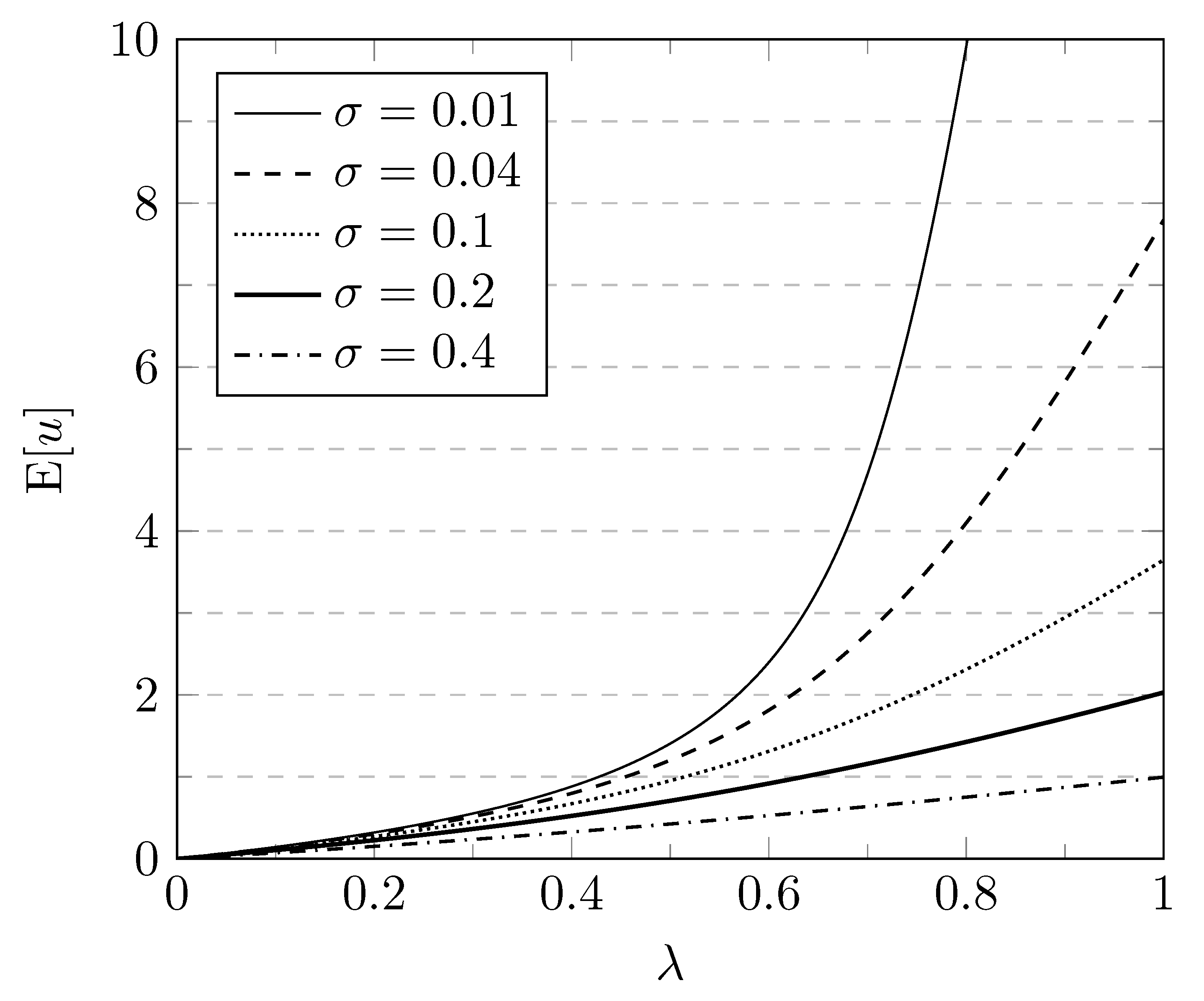
In order to illustrate the results obtained above, let us consider a number of numerical examples. In a first set of examples, in
Figure 1,
Figure 2,
Figure 3 and
Figure 4, we consider a Poisson distribution for the number of customer arrivals during a slot, i.e.,
and a (shifted) geometric distribution for the service times, i.e.,
with
(
). In
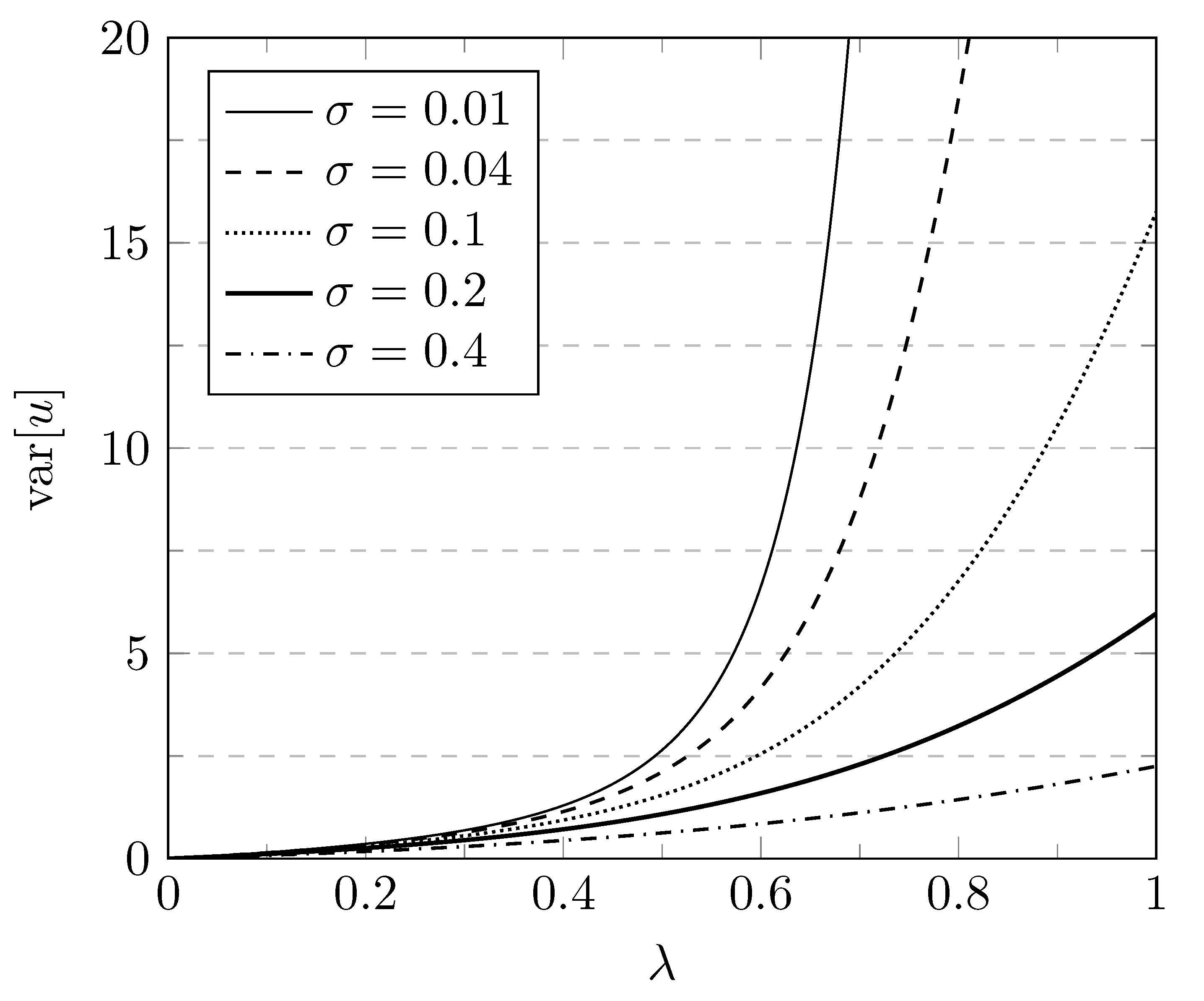
Figure 1, the mean system content
is plotted versus the arrival rate
, for different values of the disaster probability
. Similarly,
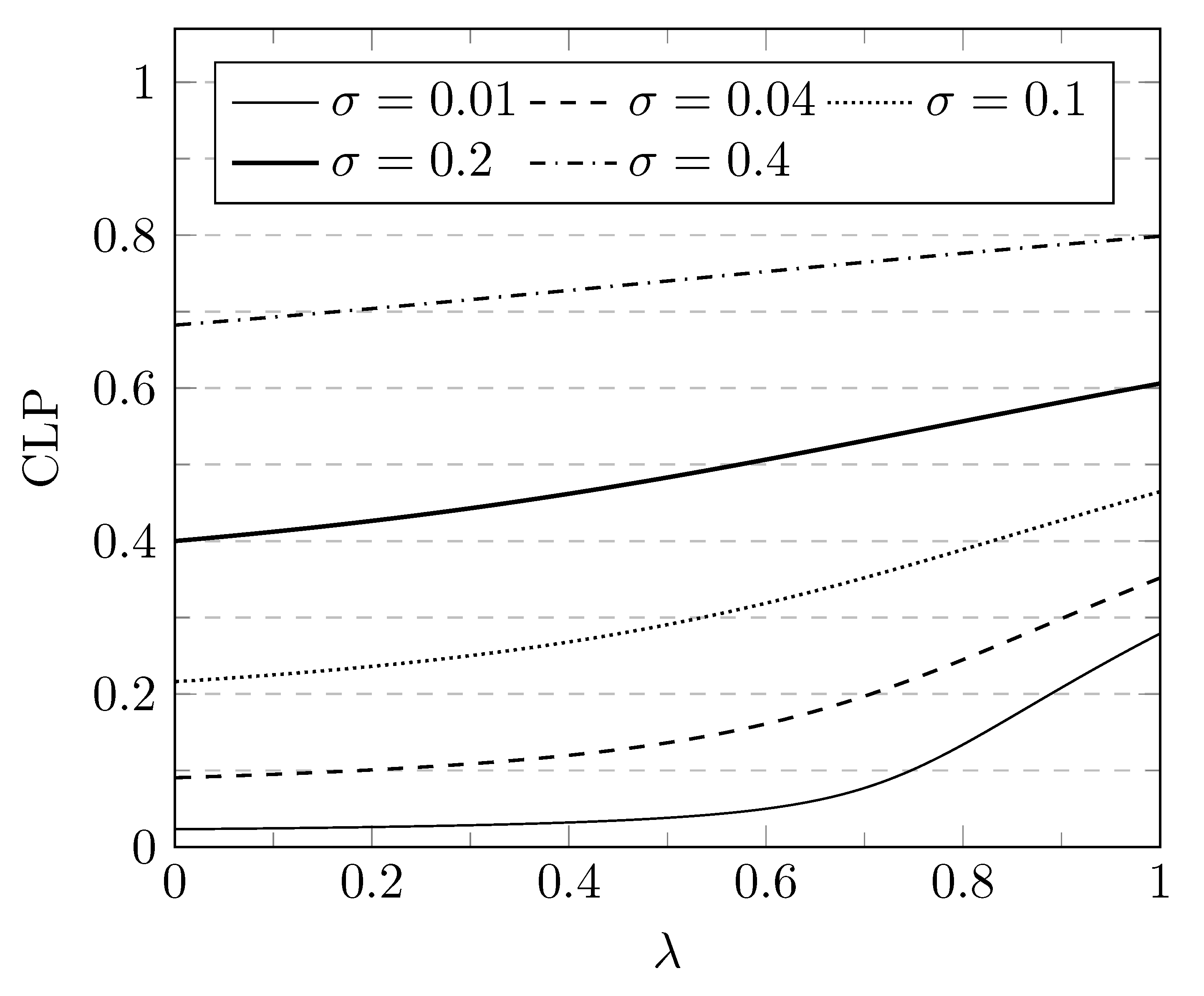
Figure 2 shows the variance of the system content
, the mean sojourn time
is plotted in
Figure 3 and the customer loss probability is shown in
Figure 4, all versus
for different values of
. We observe that for an increasing disaster probability,
,
and
are decreasing, while
is increasing. This is clearly as intuitively expected. Indeed, the more often the system gets emptied due to a disaster occurrence (higher
), the more customers are expected to get lost and the lower and less variable the system content and sojourn time thus become.
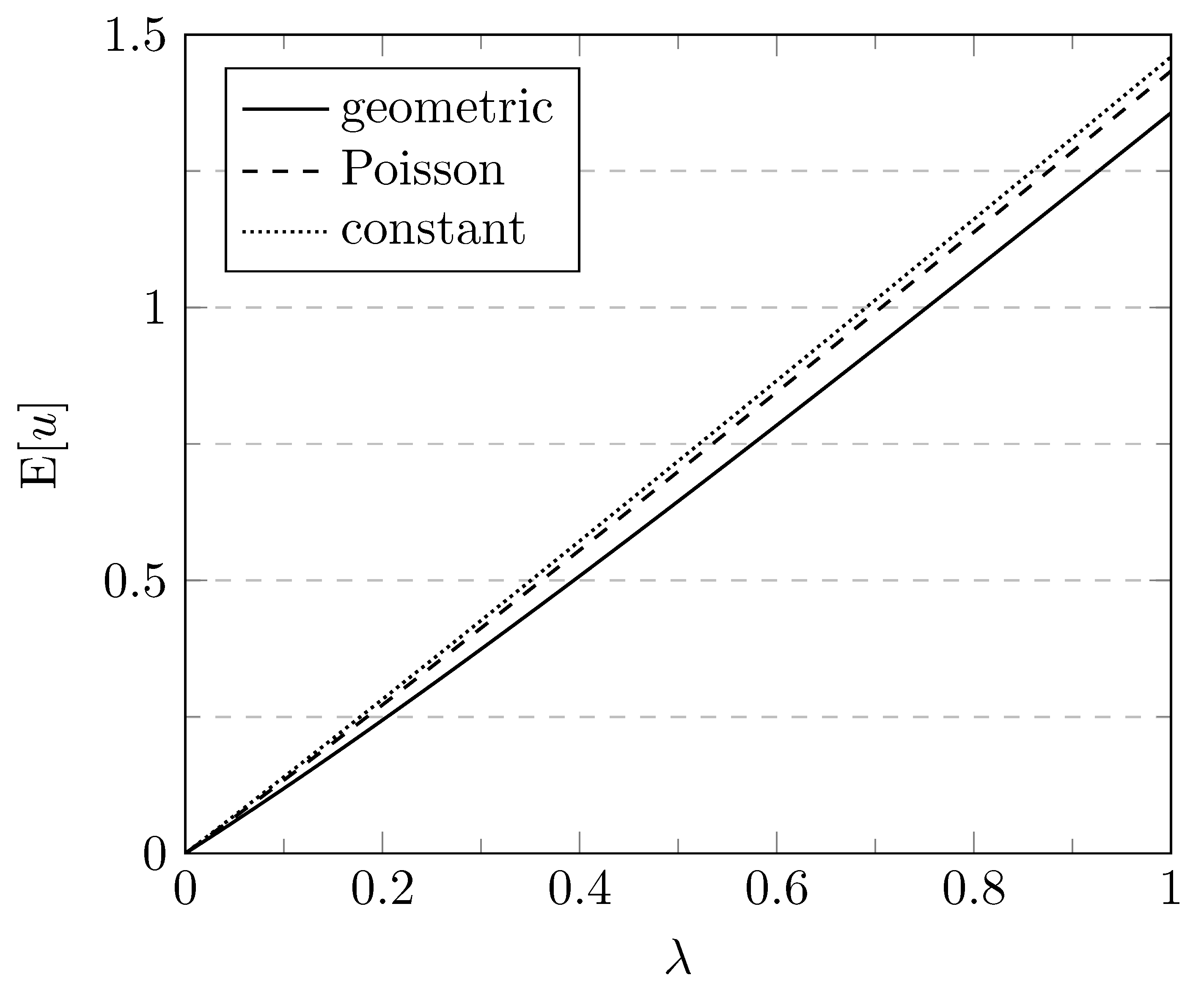
Next, in
Figure 5, a number of different distributions are considered for the customer service times, all with the same mean service time
: a (shifted) geometric distribution, a (shifted) Poisson distribution with
and constant service times with
Figure 5 shows the mean system content versus
, for Poisson arrivals and a disaster probability
. For
, the variance of the service times increases from 0 in the case of constant service times, to
in the case of Poisson service times, and finally to
in the case of geometric service times. We observe that
decreases as the variance of the service times increases. Note that this is different from what is seen in classical queueing systems without disasters, where the mean system content typically increases with higher irregularity in the service times. The behavior of
Figure 5 then follows from the fact that in the case of disaster occurrence, typically more customers are removed from the system when the service times are more variable, resulting in a lower system content on average.
In
Figure 6,
Figure 7 and
Figure 8, we consider Poisson arrivals and a (shifted) Poisson distribution for the service times. In
Figure 6, the mean system content is shown versus the mean service time
for
and various values of
. Similarly,
Figure 7 shows the variance
of the system content, and
Figure 8 shows the customer loss probability. From these figures, it can be seen that for a given value of
,
,
and
all increase with increasing values of
, which could be expected due to the increasing system load
. For increasing values of
, we observe again that
and
are decreasing, while the loss probability increases, as is intuitively clear.
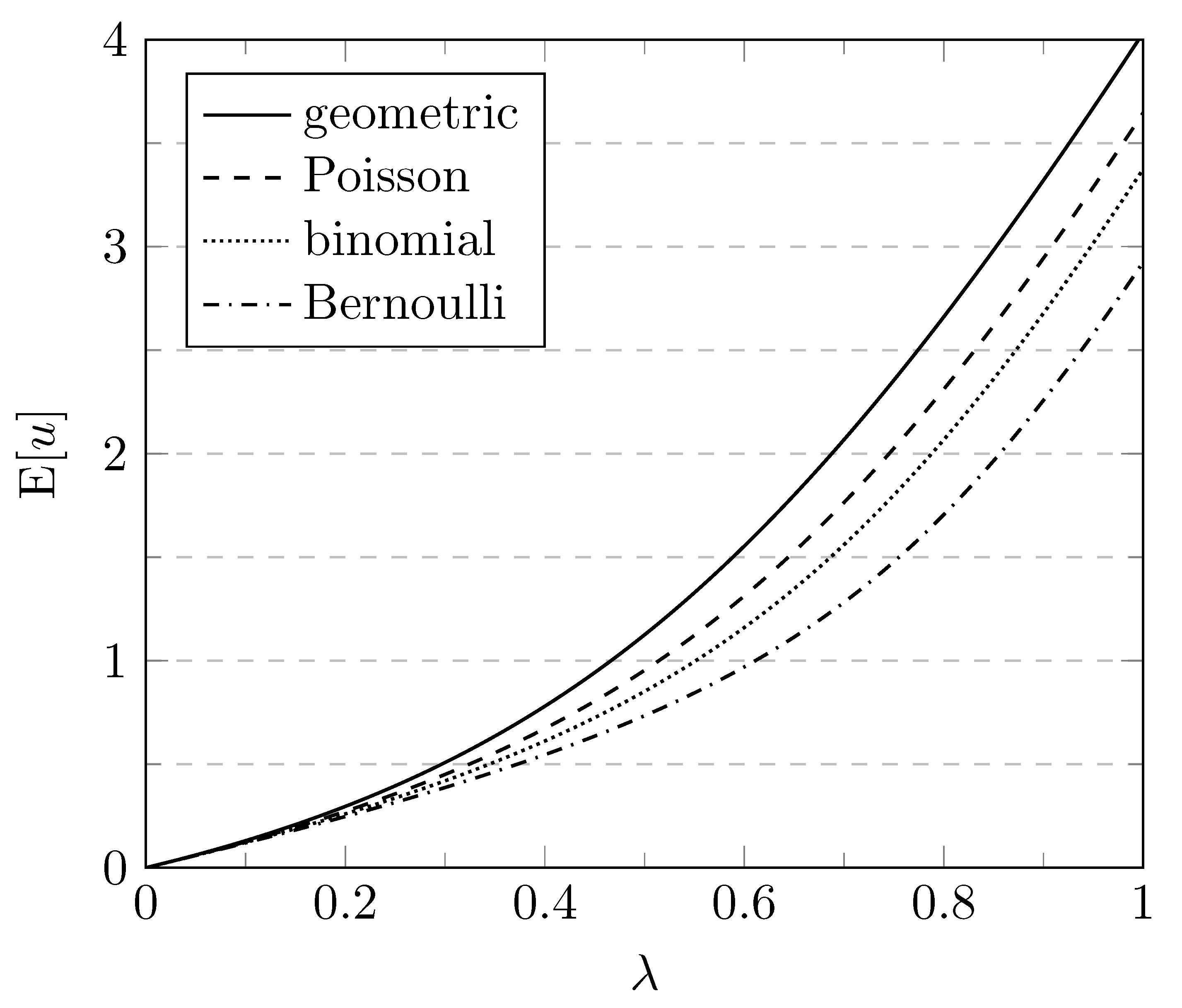
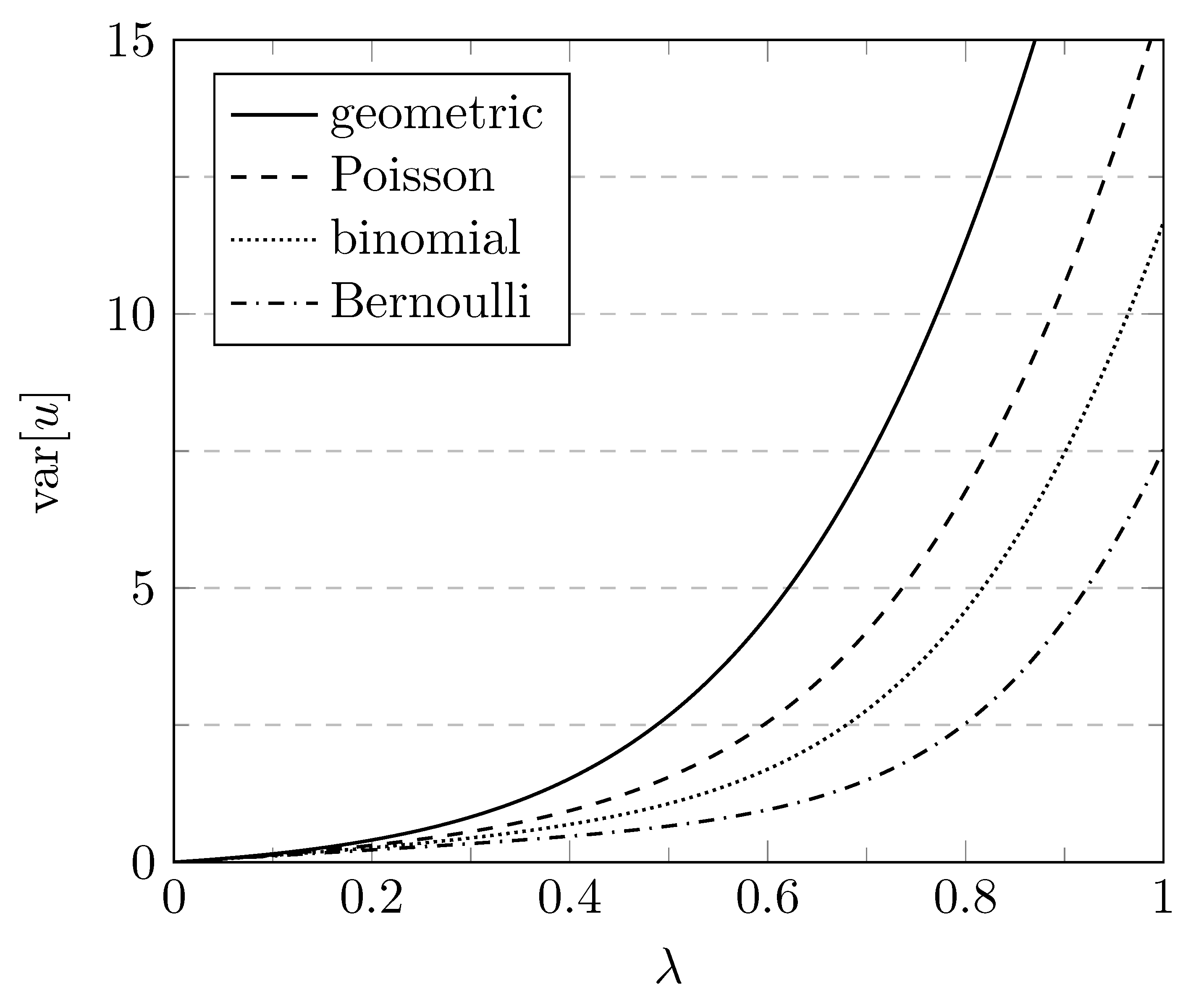
In
Figure 9,
Figure 10 and
Figure 11, (shifted) geometric service times are considered with
. A number of different arrival distributions are considered, all with the same mean arrival rate
: Poisson arrivals, Bernoulli arrivals, i.e.,
geometric arrivals, i.e.,
and binomial arrivals, i.e.,
where
.
Figure 9 and
Figure 10 show the mean system content
and the variance of the system content
versus
, for a fixed disaster probability
. We observe that both
and
decrease in the order of geometric, Poisson, binomial and Bernoulli arrivals. This means that for given values of
and
,
and
decrease as the variance of the number of arrivals per slot decreases.
In
Figure 11, the variance of the system content is plotted versus
for the same four arrival distributions with a fixed value of
. For all arrival distributions, the variance
decreases while the value of
is increasing, in accordance with the observations of
Figure 2.
In
Figure 12, the tail distribution of the system content is plotted on a logarithmic scale for (shifted) Poisson service times with
, Poisson arrivals with arrival rate
and different values of the disaster probability
. For the same setting,
Figure 13 shows the tail distribution of the sojourn time. We observe that, similar to the moments of the system content and the sojourn time, also the corresponding tail probabilities are decreasing functions of the disaster probability.
Finally,
Table 1 presents some numerical results on the tail probabilities, the mean value and the variance of both the system content
u and the sojourn time
t for two different values of the disaster probability
. We consider Poisson arrivals with
and Poisson service times with
(
).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}