
Multi-Objective Artificial Bee Colony Algorithm with Minimum Manhattan Distance for Passive Power Filter Optimization Problems


Abstract
:1. Introduction
1.1. Background
1.2. Aim and Contributions
1.3. Paper Organization
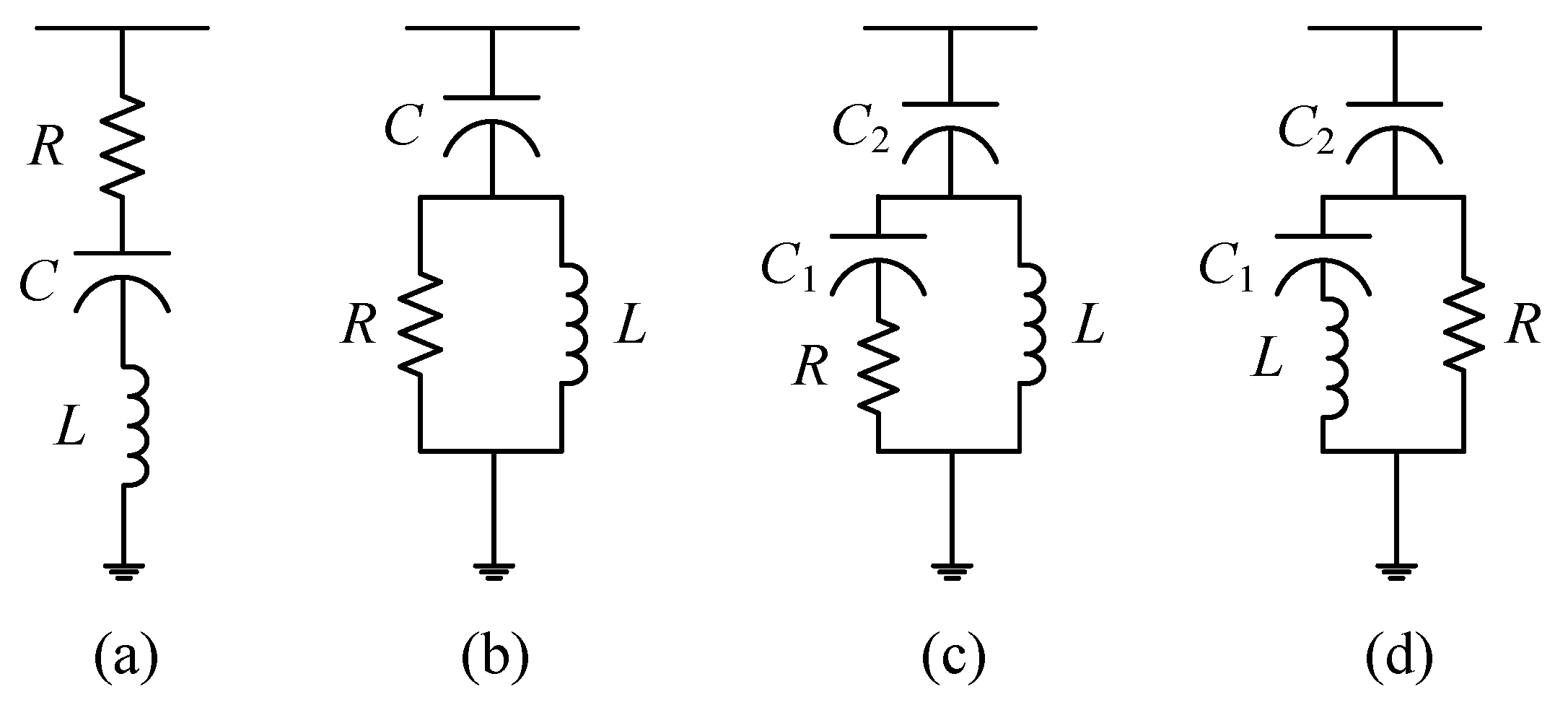
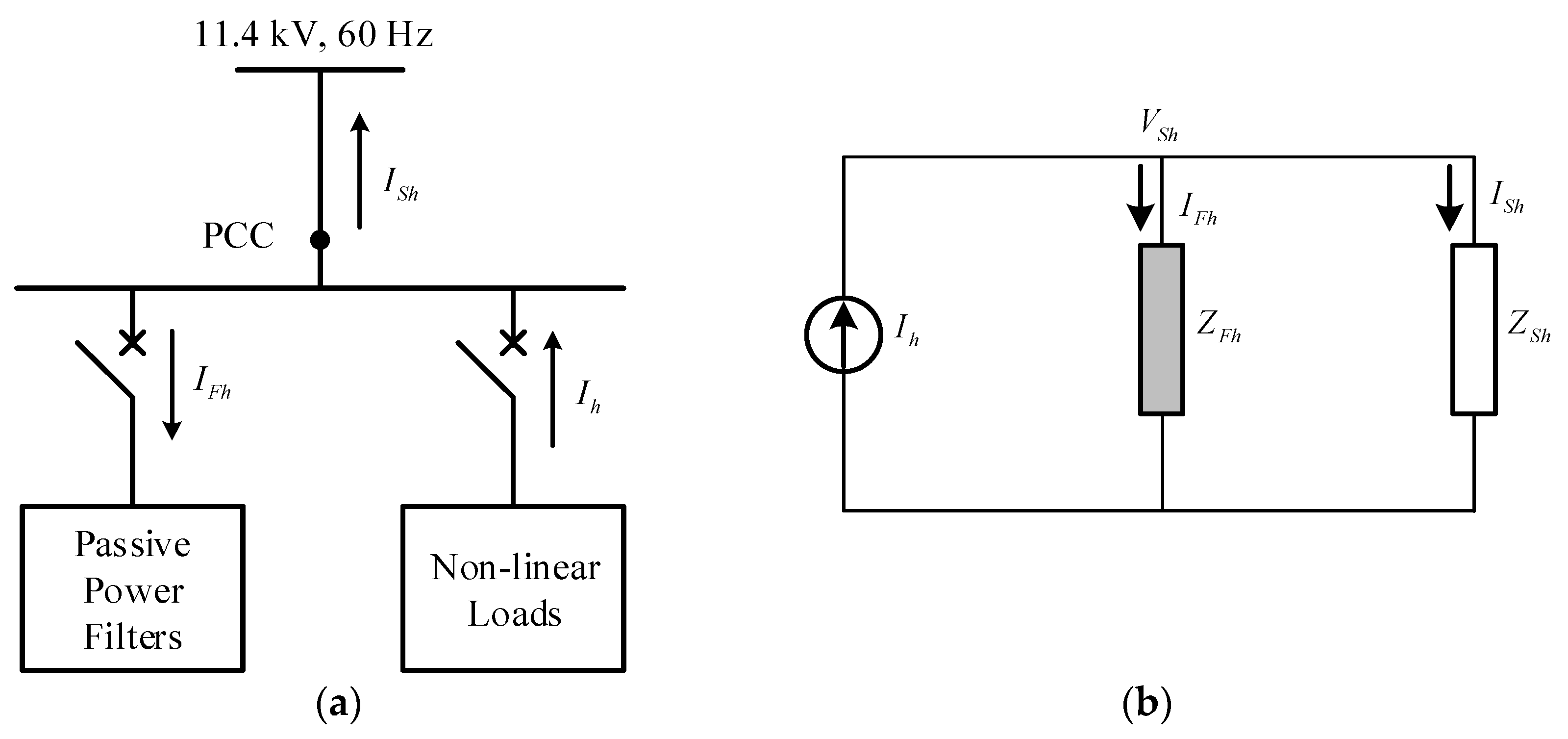
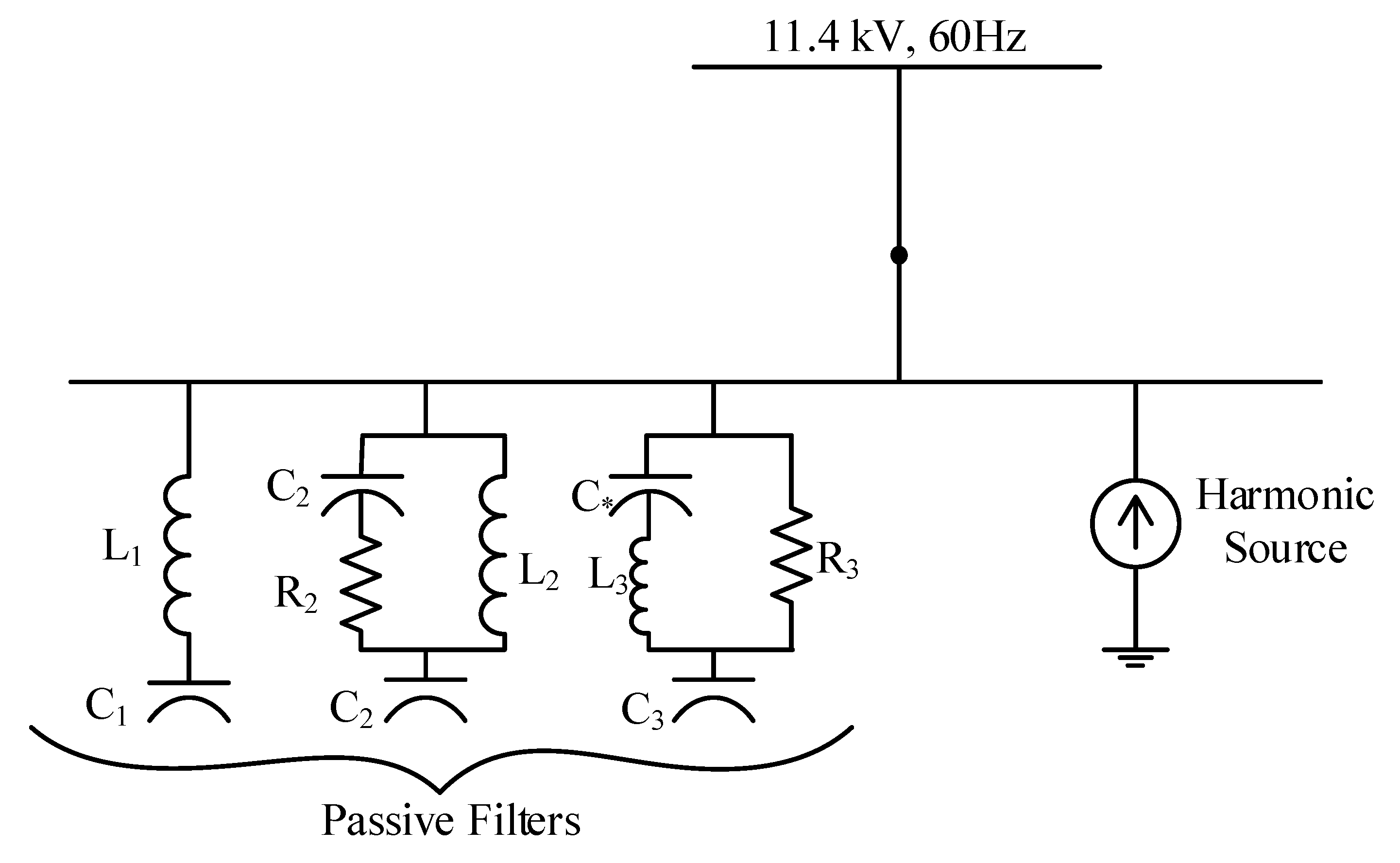
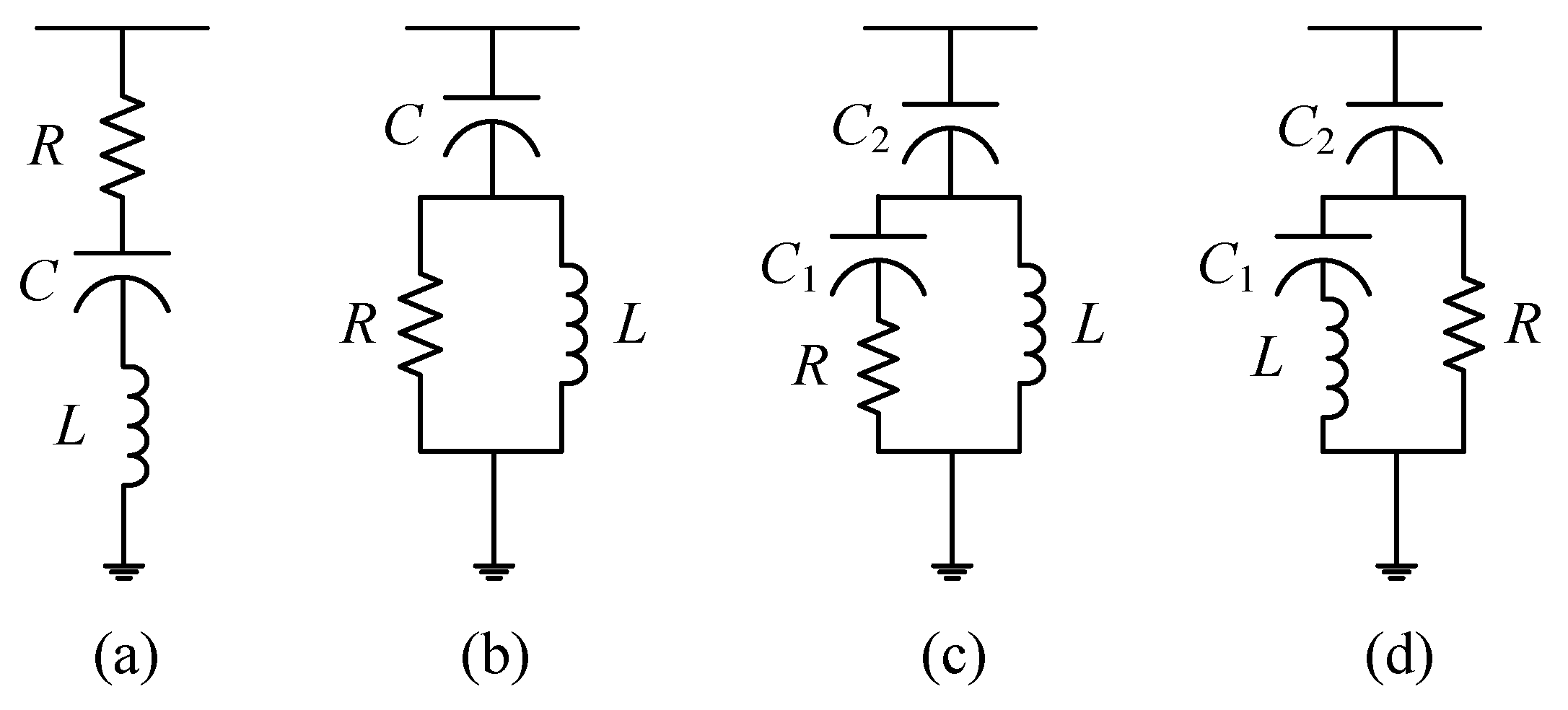
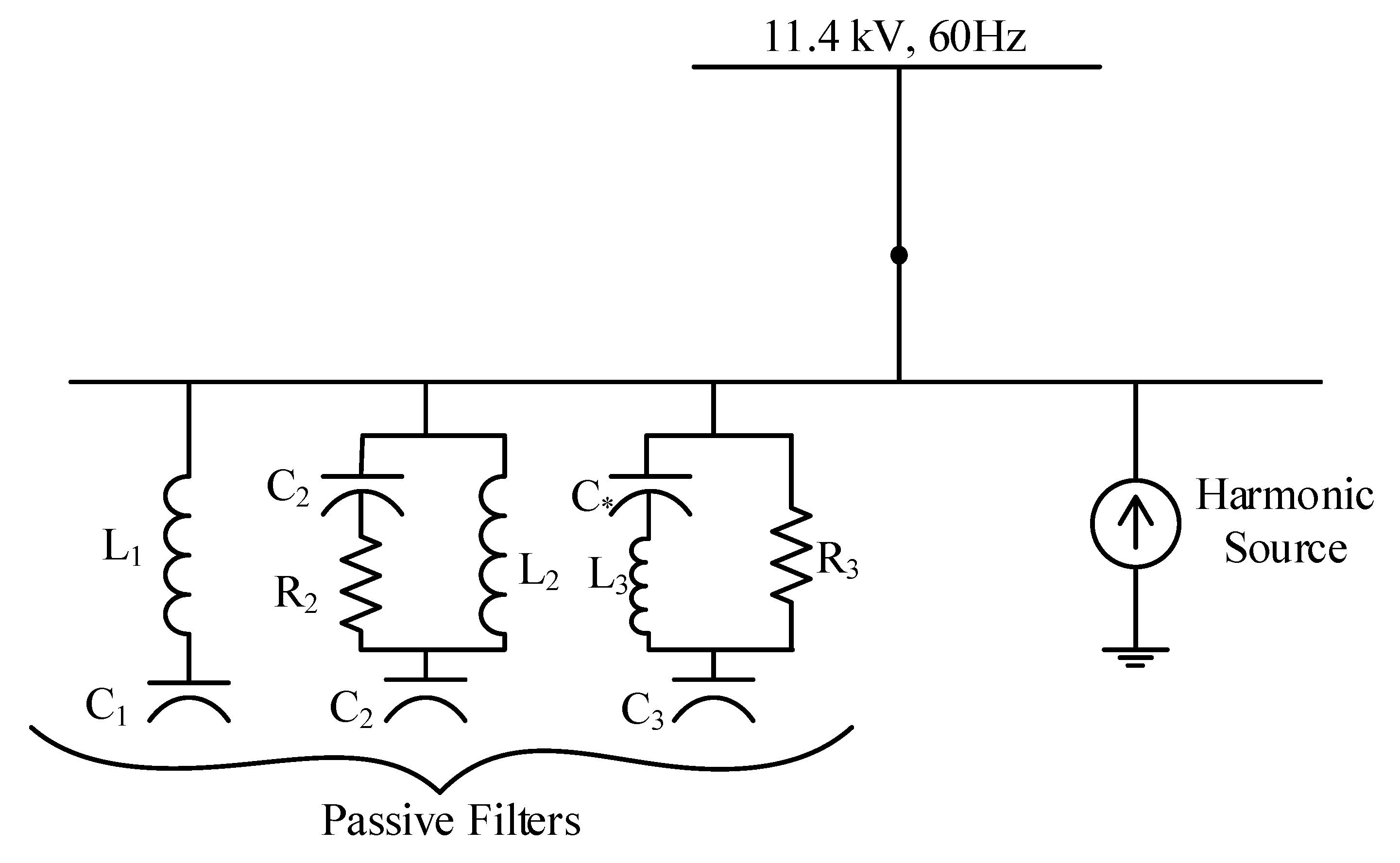
2. Passive Power Filters and Their Characteristics
3. Problem Formulation
3.1. Objective Functions
3.1.1. Minimizing Total Harmonic Distortion of Current
3.1.2. Minimizing Total Harmonic Distortion of Voltage
3.1.3. Minimizing Initial Investment Cost
3.1.4. Maximizing Total Fundamental Reactive Power Compensation
3.2. Constraints
3.2.1. Total Harmonic Distortion
3.2.2. Individual Harmonic Distortion
3.2.3. Total Fundamental Reactive Power Compensation
4. Proposed Algorithm
4.1. Single-Objective Artificial Bee Colony Algorithm
- Initialization: Initialization is the first step in which the population denoted by P of solution (food source position) is initialized. Moreover, each solution () is supposed to be a -dimensional vector, where is denoted as the number of onlookers/employed bees and is the number of parameters for optimization.
- Employed bee phase: In the starting phase, the employed bees are sent to identify the positions of food sources and update the feasible food sources in the memory. The memory is updated to produce a feasible candidate using (14) [32].where is considered as the new optimal position of the food source produced by the employed bee and is supposed to be a random number within the range of [−1, 1] to modify the production of neighboring food sources near and compare the positions of the two food sources.
- Onlooker bee phase: After evaluating the quality (fitness) of the food source position in the memory using (15), the onlooker bee chooses the best position of the food source, based on the probability proportional to the quality of food source through (16) [33]. Update the feasible candidate by the onlooker bees using (14).where is considered as the objective function value, is supposed to be the measure of the fitness value of the solution proportional to the nectar quantity of the food source, and is the number of employed/onlooker bees.
- Scout bee phase: If the food source cannot be improved via a limited number of trials, then the food source is discarded. In addition, the associated employed bee becomes a scout bee to randomly search for a new source of food using (17) [32,33].where and are the lower and upper bounds of each variable for the search scope, respectively. Here, in every vector, the range [, ] is the boundary of each component so that the scout bee does not leave the search space.
- Memory update: Save the best position of food source found so far.
- Termination check: Finally, a check is performed as to whether the termination condition is reached; if yes, the algorithm is terminated, and the final solutions are reported; otherwise, return to the starting search phase, that is, the employed bee phase.
4.2. Multi-Objective Artificial Bee Colony Algorithm
4.2.1. Pareto Optimality
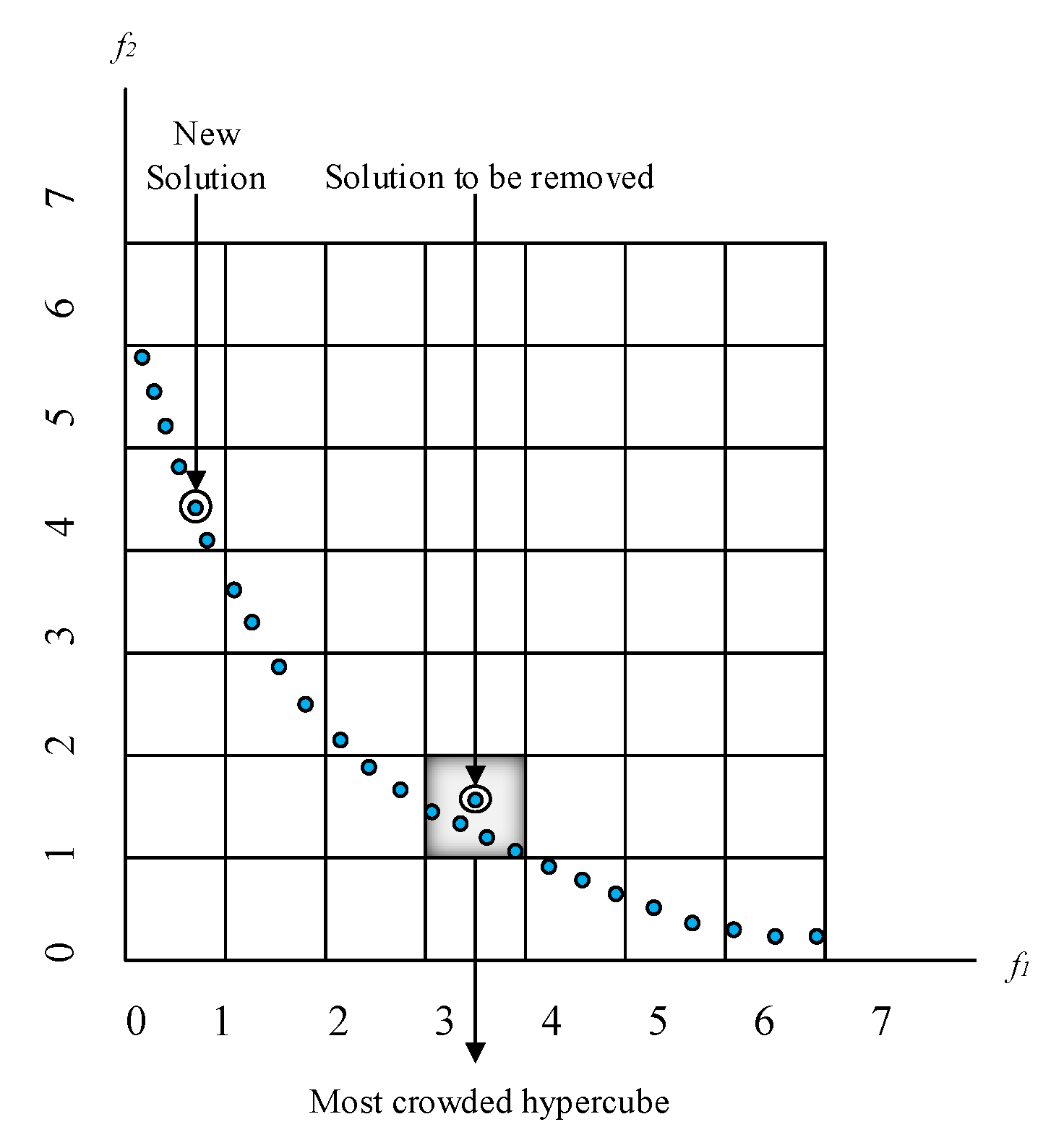
4.2.2. External Archive
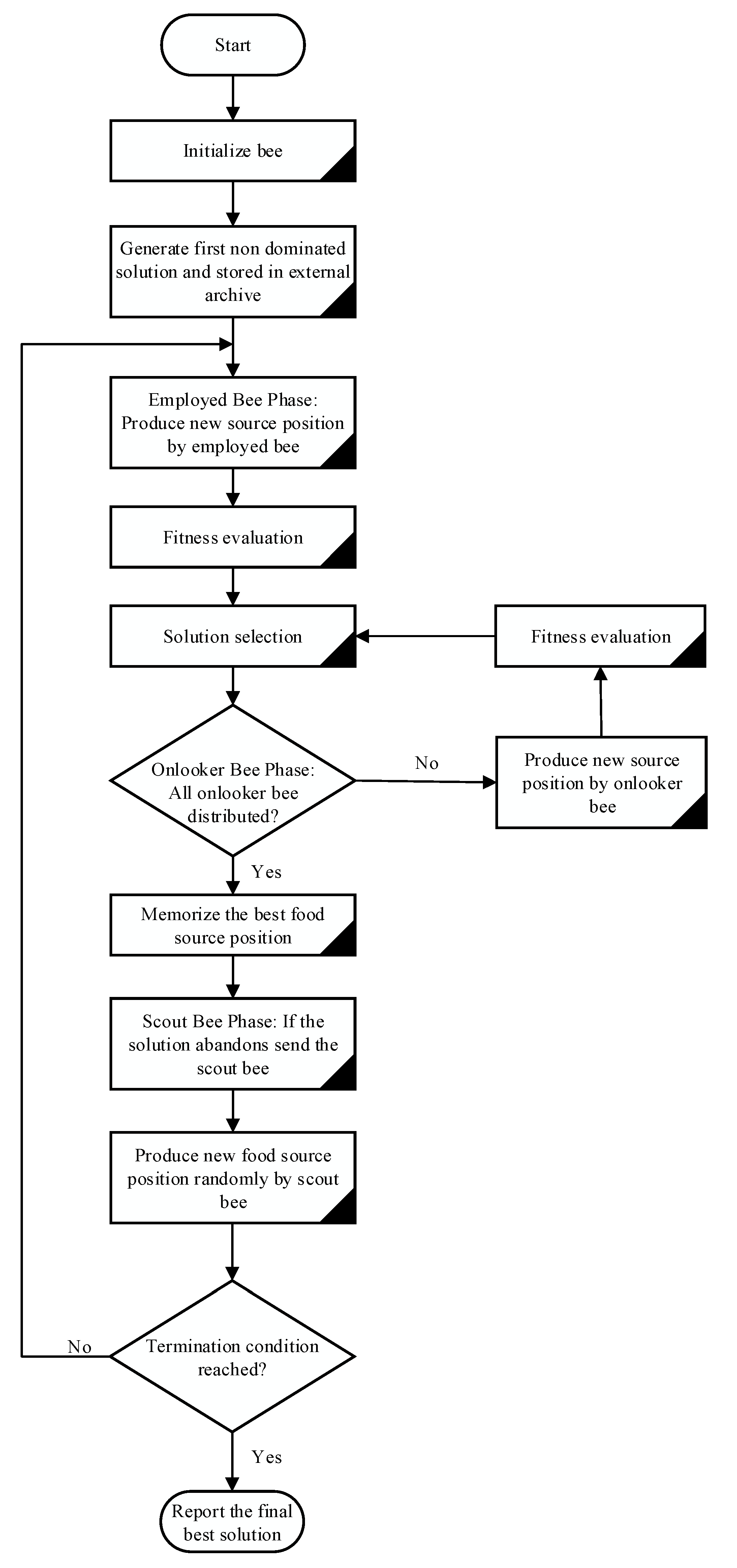
4.2.3. Modified Artificial Bee Colony Algorithm
- In the onlooker bee phase, a new search method is proposed for onlooker bees, in which the first position is determined using (16) by a roulette wheel mechanism from an external archive. Thereafter, the is used to adjust the moving trajectory in the next iteration. The position is updated using (24),where is the new location of the food source chosen by the onlooker bee, is the random number to adjust the production of neighbor food sources around , and is the global position vector for onlooker bees with that of the food source .
- The random number is chosen between [0, 1], which is different from the original ABC, and it creates a potential search space around .
- The Pareto approach and the external archive are integrated into the proposed MOABC algorithm.
- Initialization phase
- Initialize the food source position.
- Define trail counter limit for the population and scout bees.
- Generate the first non-dominated solution.
- Generate external archives by inserting non-dominated solutions.
- Define trial counters for the food sources.
- Assign the food sources to the employed bees.
- Employed bee phase
- Produce a new position of the food source.
- Evaluate the fitness of the identified food source position.
- If the fitness of the new position is better than the old one, update the new position, and decrease the trial counter by 1; otherwise, increase it by 1.
- Onlooker bee phase
- Choose the solution from the population using tournament selection probability.
- For each onlooker bee, produce a new food source position.
- Evaluate the fitness of the candidate food source.
- Apply the greedy selection procedure to choose the best source.
- Save the best solution obtained so far.
- Scout bee phase
- If the solution cannot be improved after a limited number of trials, then a scout bee occurs, and a new food source position is produced.
- Evaluate the fitness of the produced food-source position.
- Reset its trial counter.
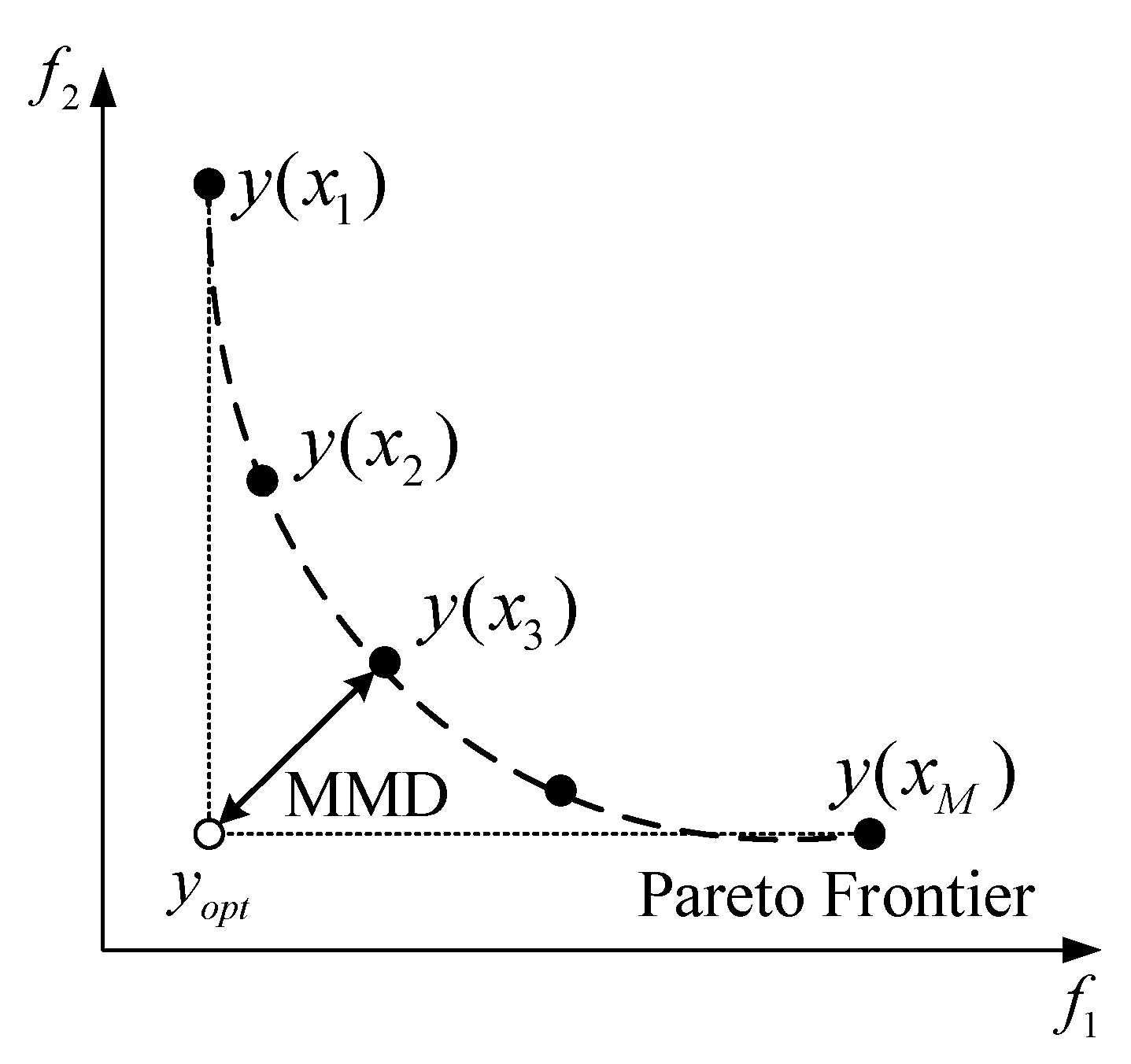
4.2.4. Multi-Criteria Decision Making
5. Simulation Result
5.1. Sample System
5.2. Setting Parameters
5.3. Accuracy Test
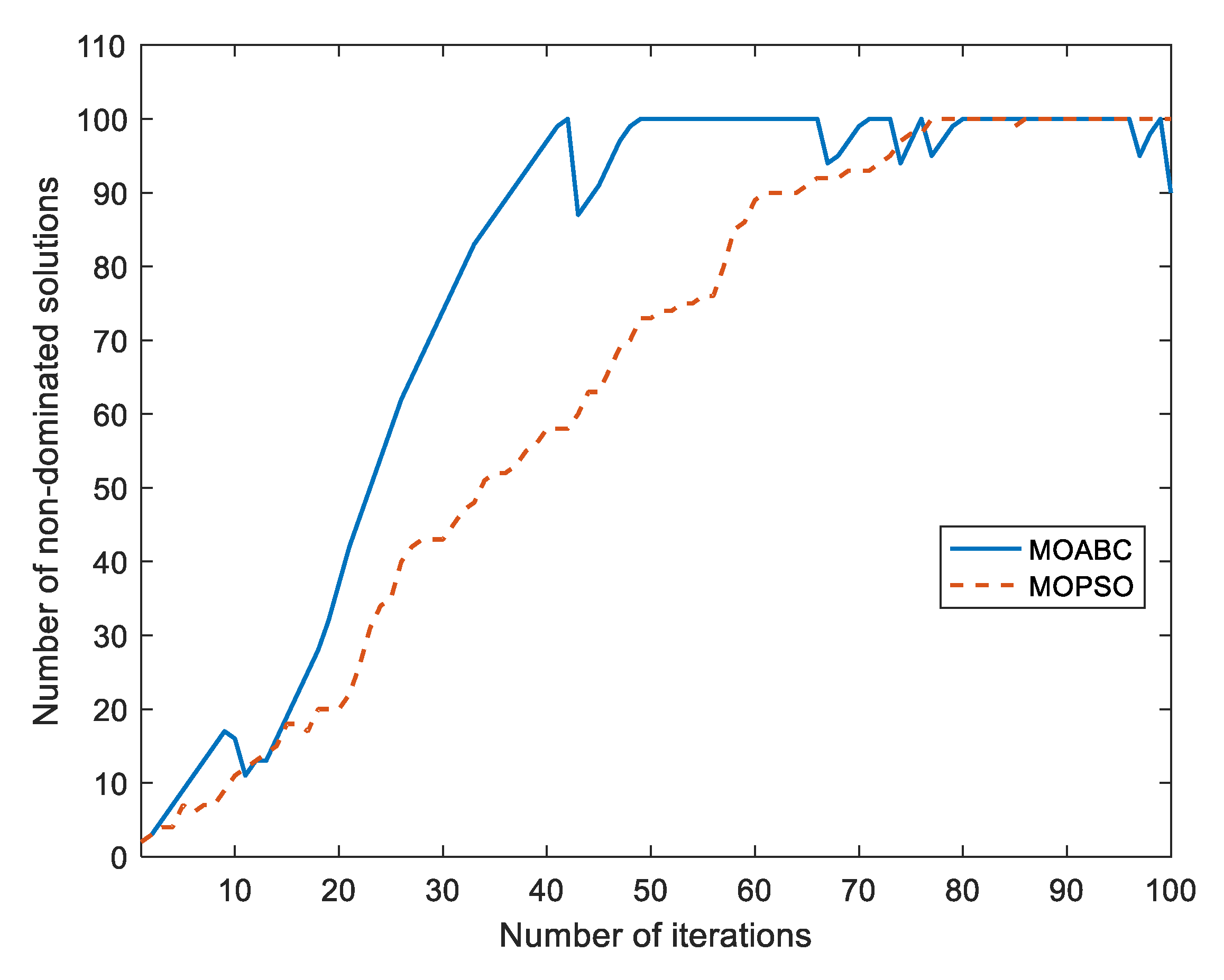
5.4. Performance Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Eroğlu, H.; Cuce, E.; Cuce, P.M.; Gul, F.; Iskenderoğlu, A. Harmonic problems in renewable and sustainable energy systems: A comprehensive review. Sustain. Energy Technol. Assess. 2021, 48, 101566. [Google Scholar] [CrossRef]
- Baliyan, A.; Jamil, M.; Rizwan, M. Power Quality Improvement Using Harmonic Passive Filter in Distribution System. In Advances in Energy Technology; Springer: Singapore, 2022; pp. 435–445. [Google Scholar]
- Michalec, L.; Jasiński, M.; Sikorski, T.; Leonowicz, Z.; Jasiński, L.; Suresh, V. Impact of Harmonic Currents of Nonlinear Loads on Power Quality of a Low Voltage Network–Review and Case Study. Energies 2021, 14, 3665. [Google Scholar] [CrossRef]
- Manito, A.; Bezerra, U.; Tostes, M.; Matos, E.; Carvalho, C.; Soares, T. Evaluating Harmonic Distortions on Grid Voltages Due to Multiple Nonlinear Loads Using Artificial Neural Networks. Energies 2018, 11, 3303. [Google Scholar] [CrossRef] [Green Version]
- Caicedo, J.; Romero, A.; Zini, H. Frequency domain modeling of nonlinear loads, considering harmonic interaction. In Proceedings of the 2017 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA), Bogota, Colombia, 31 May–2 June 2017; pp. 1–6. [Google Scholar]
- Gheisarnejad, M.; Mohammadi-Moghadam, H.; Boudjadar, J.; Khooban, M.H. Active power sharing and frequency recovery control in an islanded microgrid with nonlinear load and nondispatchable DG. IEEE Syst. J. 2019, 14, 1058–1068. [Google Scholar] [CrossRef]
- Ismael, S.M.; Aleem, S.H.A.; Abdelaziz, A.Y.; Zobaa, A.F. State-of-the-art of hosting capacity in modern power systems with distributed generation. Renew. Energy 2019, 130, 1002–1020. [Google Scholar] [CrossRef]
- Ali, Z.M.; Diaaeldin, I.M.; Aleem, S.H.E.A.; El-Rafei, A.; Abdelaziz, A.Y.; Jurado, F. Scenario-Based Network Reconfiguration and Renewable Energy Resources Integration in Large-Scale Distribution Systems Considering Parameters Uncertainty. Mathematics 2021, 9, 26. [Google Scholar] [CrossRef]
- Li, D.; Yang, K.; Zhu, Z.Q.; Qin, Y. A Novel Series Power Quality Controller with Reduced Passive Power Filter. IEEE Trans. Ind. Electron. 2016, 64, 773–784. [Google Scholar] [CrossRef]
- Azebaze Mboving, C.S. Investigation on the Work Efficiency of the LC Passive Harmonic Filter Chosen Topologies. Electronics 2021, 10, 896. [Google Scholar] [CrossRef]
- Bollen, M.H.; Das, R.; Djokic, S.; Ciufo, P.; Meyer, J.; Rönnberg, S.K.; Zavodam, F. Power Quality Concerns in Implementing Smart Distribution-Grid Applications. IEEE Trans. Smart Grid 2017, 8, 391–399. [Google Scholar] [CrossRef] [Green Version]
- Kalair, A.; Abas, N.; Saleem, Z.; Khan, N. Review of harmonic analysis, modeling and mitigation techniques. Renew. Sustain. Energy Rev. 2017, 78, 1152–1187. [Google Scholar] [CrossRef]
- Das, J.C. Passive filters—Potentialities and limitations. IEEE Trans. Ind. Appl. 2004, 40, 232–241. [Google Scholar] [CrossRef]
- Ahmed, M.; Nahid-Al-Masood; Aziz, T. An approach of incorporating harmonic mitigation units in an industrial distribution network with renewable penetration. Energy Rep. 2021, 7, 6273–6291. [Google Scholar] [CrossRef]
- Murugan, A.S.S. Meta-Heuristic Firefly Algorithm Based Optimal Design of Passive Harmonic Filter for Harmonic Mitigation. Int. Res. J. Adv. Sci. Hub 2021, 3, 18–22. [Google Scholar]
- Chang, G.W.; Wang, H.L.; Chuang, G.S.; Chu, S.Y. Passive Harmonic Filter Planning in a Power System with Considering Probabilistic Constraints. IEEE Trans. Power Deliv. 2009, 24, 208–218. [Google Scholar] [CrossRef]
- He, N.; Xu, D.G.; Huang, L.N. The Application of Particle Swarm Optimization to Passive and Hybrid Active Power Filter Design. IEEE Trans. Ind. Electron. 2009, 56, 2841–2851. [Google Scholar] [CrossRef]
- Chang, Y.P.; Tseng, W.K.; Tsao, T.F. Application of combined feasible-direction method and genetic algorithm to optimal planning of harmonic filters considering uncertainty conditions. IEE Proc.-Gener. Transm. Distrib. 2005, 152, 729–736. [Google Scholar] [CrossRef]
- Ko, C.N.; Chang, Y.P.; Wu, C.J. A PSO Method With Nonlinear Time-Varying Evolution for Optimal Design of Harmonic Filters. EEE Trans. Power Syst. 2009, 24, 437–444. [Google Scholar] [CrossRef]
- Kawann, C.; Emanuel, A.E. Passive shunt harmonic filters for low and medium voltage: A cost comparison study. IEEE Trans. Power Syst. 1996, 11, 1825–1831. [Google Scholar] [CrossRef]
- Lin, K.P.; Lin, M.H.; Lin, T.P. An advanced computer code for single-tuned harmonic filter design. IEEE Trans. Ind. Appl. 1998, 34, 640–648. [Google Scholar] [CrossRef]
- Makram, E.B.; Subramaniam, E.V.; Girgis, A.A.; Catoe, R. Harmonic Filter Design Using Actual Recorded Data. IEEE Trans. Ind. Appl. 1993, 29, 1176–1183. [Google Scholar] [CrossRef]
- Chen, Y.M. Passive filter design using genetic algorithms. IEEE Trans. Ind. Electron. 2003, 50, 202–207. [Google Scholar] [CrossRef]
- Chang, G.W.; Wang, H.L.; Chu, S.Y. Strategic placement and sizing of passive filters in a power system for controlling voltage distortion. IEEE Trans. Power Deliv. 2004, 19, 1204–1211. [Google Scholar] [CrossRef]
- Chou, C.J.; Liu, C.W.; Lee, J.Y.; Lee, K.D. Optimal planning of large passive-harmonic-filters set at high voltage level. EEE Trans. Power Syst. 2000, 15, 433–441. [Google Scholar] [CrossRef] [Green Version]
- Badugu, R.; Acharya, D.; Das, D.K.; Prakash, M. Class Topper Optimization Algorithm based Optimum Passive Power Filter Design for Power System. In Proceedings of the 2021 5th International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 8–10 April 2021; pp. 648–652. [Google Scholar]
- Wang, Y.; Liu, H.; Yin, K.; Yuan, Y. A Full-Tuned Filtering Method for Dynamic Tuning Passive Filter Power Electronics. J. Control. Autom. Electr. Syst. 2021, 32, 1771–1781. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, K.; Liu, H.; Yuan, Y. A Method for Designing and Optimizing the Electrical Parameters of Dynamic Tuning Passive Filter. Symmetry 2021, 13, 1115. [Google Scholar] [CrossRef]
- Azab, M. Multi-objective design approach of passive filters for single-phase distributed energy grid integration systems using particle swarm optimization. Energy Rep. 2020, 6, 157–172. [Google Scholar] [CrossRef]
- Wang, S.; Ding, X.; Wang, J. Multi-objective optimization design of passive filter based on particle swarm optimization. J. Physics Conf. Ser. 2020, 1549, 032017. [Google Scholar] [CrossRef]
- Yang, N.-C.; Liu, S.-W. Multi-Objective Teaching–Learning-Based Optimization with Pareto Front for Optimal Design of Passive Power Filters. Energies 2021, 14, 6408. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-TR06; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Mansouri, P.; Asady, B.; Gupta, N. The Bisection-Artificial Bee Colony algorithm to solve Fixed point problems. Appl. Soft Comput. 2015, 26, 143–148. [Google Scholar] [CrossRef]
- Benyoucef, A.S.; Chouder, A.; Kara, K.; Silvestre, S.; Sahed, O.A. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef] [Green Version]
- Zou, W.P.; Zhu, Y.L.; Chen, H.N.; Zhang, B.W. Solving Multiobjective Optimization Problems Using Artificial Bee Colony Algorithm. Discret. Dyn. Nat. Soc. 2011, 2011, 569784. [Google Scholar] [CrossRef] [Green Version]
- Karaboga, D.; Akay, B. A modified Artificial Bee Colony (ABC) algorithm for constrained optimization problems. Appl. Soft Comput. 2011, 11, 3021–3031. [Google Scholar] [CrossRef]
- Akay, B. Synchronous and asynchronous Pareto-based multi-objective Artificial Bee Colony algorithms. J. Glob. Optim. 2013, 57, 415–445. [Google Scholar] [CrossRef]
- Xiang, Y.; Zhou, Y.R. A dynamic multi-colony artificial bee colony algorithm for multi-objective optimization. Appl. Soft Comput. 2015, 35, 766–785. [Google Scholar] [CrossRef]
- Akbari, R.; Hedayatzadeh, R.; Ziarati, K.; Hassanizadeh, B. A multi-objective artificial bee colony algorithm. Swarm Evol. Comput. 2012, 2, 39–52. [Google Scholar] [CrossRef]
- Xiang, Y.; Zhou, Y.R.; Liu, H.L. An elitism based multi-objective artificial bee colony algorithm. Eur. J. Oper. Res. 2015, 245, 168–193. [Google Scholar] [CrossRef]
- Chu, R.F.; Wang, J.C.; Chiang, H.D. Strategic-Planning of Lc Compensators in Nonsinusoidal Distribution-Systems. EEE Trans. Power Deliv. 1994, 9, 1558–1563. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Knowles, J.D.; Corne, D.W. Approximating the Nondominated Front Using the Pareto Archived Evolution Strategy. Evol. Comput. 2000, 8, 149–172. [Google Scholar] [CrossRef] [PubMed]
- Knowles, J.; Corne, D. Properties of an adaptive archiving algorithm for storing nondominated vectors. IEEE Trans. Evol. Comput. 2003, 7, 100–116. [Google Scholar] [CrossRef]
- Reyes-Sierra, M.; Coello, C.C. Multi-objective particle swarm optimizers: A survey of the state-of-the-art. Int. J. Comput. Intell. Res. 2006, 2, 287–308. [Google Scholar]
- Coello, C.C.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002; pp. 1051–1056. [Google Scholar]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Chiu, W.-Y.; Yen, G.G.; Juan, T.-K. Minimum manhattan distance approach to multiple criteria decision making in multiobjective optimization problems. IEEE Trans. Evol. Comput. 2016, 20, 972–985. [Google Scholar] [CrossRef] [Green Version]
- Mernik, M.; Liu, S.H.; Karaboga, D.; Crepinsek, M. On clarifying misconceptions when comparing variants of the Artificial Bee Colony Algorithm by offering a new implementation. Inf. Sci. 2015, 291, 115–127. [Google Scholar] [CrossRef]
- Xiang, Y.; Peng, Y.M.; Zhong, Y.B.; Chen, Z.Y.; Lu, X.W.; Zhong, X.J. A particle swarm inspired multi-elitist artificial bee colony algorithm for real-parameter optimization. Comput. Optim. Appl. 2014, 57, 493–516. [Google Scholar] [CrossRef]
- Yang, N.C.; Le, M.D. Multi-objective bat algorithm with time-varying inertia weights for optimal design of passive power filters set. IET Gener. Transm. Distrib. 2015, 9, 644–654. [Google Scholar] [CrossRef]
- IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems; IEEE: New York, NY, USA, 1993; pp. 1–100.
- Van Veldhuizen, D.A.; Lamont, G.B. Multiobjective Evolutionary Algorithm Research: A History and Analysis. 1998. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.35.8924 (accessed on 1 October 2021).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | ||
|---|---|---|
| ST | ||
| SD | ||
| TD 1 | ||
| CD 2 |
| Cases | Harmonic Orders | Current, A | Voltage, V | IEEE Standard 519 | |||
|---|---|---|---|---|---|---|---|
| Current, A | Current, % | Voltage, V | Voltage, % | ||||
| Case 1 | 1 | 828.37 | 6581.79 | - | - | - | - |
| 2 | 7.02 | 11.18 | 8.28 | 1 | 197.5 | 3 | |
| 3 | 8.64 | 20.63 | 33.1 | 4 | 197.5 | 3 | |
| 4 | 5.92 | 18.85 | 8.28 | 1 | 197.5 | 3 | |
| 5 | 45.8 | 182.3 | 33.1 | 4 | 197.5 | 3 | |
| 7 | 19.0 | 105.9 | 33.1 | 4 | 197.5 | 3 | |
| 11 | 15.4 | 134.9 | 16.6 | 2 | 197.5 | 3 | |
| 13 | 9.4 | 97.28 | 16.6 | 2 | 197.5 | 3 | |
| THD (%) | 6.55 | 4.11 | - | 5 | - | 5 | |
| Case 2 | 1 | 1558.3 | 6581.79 | - | - | - | - |
| 2 | 19.2 | 30.57 | 15.58 | 1 | 197.5 | 3 | |
| 3 | 36.8 | 87.88 | 62.33 | 4 | 197.5 | 3 | |
| 4 | 5.41 | 17.23 | 15.58 | 1 | 197.5 | 3 | |
| 5 | 98.0 | 390.1 | 62.33 | 4 | 197.5 | 3 | |
| 7 | 18.0 | 100.3 | 62.33 | 4 | 197.5 | 3 | |
| 11 | 13.2 | 124.3 | 31.17 | 2 | 197.5 | 3 | |
| 13 | 12.6 | 130.4 | 31.17 | 2 | 197.5 | 3 | |
| THD (%) | 7.04 | 6.86 | - | 5 | - | 5 | |
| Case 3 | 1 | 1558.3 | 6581.79 | - | - | - | - |
| 2 | 9.45 | 15.05 | 15.58 | 1 | 197.5 | 3 | |
| 3 | 15.6 | 37.26 | 62.33 | 4 | 197.5 | 3 | |
| 4 | 3.77 | 12.0 | 15.58 | 1 | 197.5 | 3 | |
| 5 | 62.7 | 249.6 | 62.33 | 4 | 197.5 | 3 | |
| 7 | 21.0 | 117.0 | 62.33 | 4 | 197.5 | 3 | |
| 11 | 19.4 | 166.9 | 31.17 | 2 | 197.5 | 3 | |
| 13 | 17.0 | 175.9 | 31.17 | 2 | 197.5 | 3 | |
| 17 | 16.0 | 216.5 | 23.38 | 1.5 | 197.5 | 3 | |
| 19 | 15.5 | 234.4 | 23.38 | 1.5 | 197.5 | 3 | |
| THD (%) | 4.92 | 7.42 | - | 5 | - | 5 | |
| Parameter | MOABC | MOPSO | MOBA |
|---|---|---|---|
| Number of iterations | 200 | 200 | 200 |
| Population size | 20 | 20 | 20 |
| Other related parameters | Trial counter limit, Number of employed bees, Number of onlookers, Number of scouts, | Cognitive parameter, Social parameter, | Maximum frequency, Minimum frequency, Constants, |
| Item | Feasible Ranges of Parameters |
|---|---|
| Number of iterations | 200 |
| Population size | 20 |
| Number of objectives | 4 |
| Number of constraints | 22 |
| Size of external archive | 100 |
| Number of divisions | 30 |
| Maximum initial IC | 4000 pu |
| R for PPFs | 0.01–100 Ω |
| L for PPFs | 0.01–50 mH |
| C for PPFs | 0.01–900 μF |
| Title | Generational Distance | ||||
|---|---|---|---|---|---|
| Best | Worst | Average | Median | Std. Dev | |
| MOABC | 0.00000123 | 0.0186 | 0.0001646 | 0.0001193 | 0.000499 |
| MOPSO | 0.00000196 | 0.0258 | 0.0002459 | 0.0001707 | 0.000854 |
| Cases | Types of Filters | MOABC | SA |
|---|---|---|---|
| Case 1 (PF = 0.95) | Single-tuned | ||
| Single-tuned | |||
| (%) | 4.70 | 4.79 | |
| (%) | 1.29 | 1.30 | |
| Cost (pu) | 233.70 | 234.26 | |
| Case 2 (PF = 0.97) | Single-tuned | ||
| C-Type | |||
| (%) | 4.93 | 4.95 | |
| (%) | 1.32 | 1.35 | |
| Cost (pu) | 3176.23 | 3280.66 | |
| Case 3 (PF = 0.97) | Single-tuned | ||
| 3rd-order | |||
| C-Type | |||
| (%) | 3.87 | 4.81 | |
| (%) | 1.89 | 2.11 | |
| Cost (pu) | 1827.38 | 2431.17 |
| Type of Filters | Sol. No. | Parameter | Cost | THDI | THDV | PF | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 07 | 4.13 | 96.13 | 204.65 | 4.85 | 1.21 | 0.99 | ||||||||
| 1 | 35 | 4.54 | 68.70 | 311.24 | 3.76 | 1.04 | 0.99 | ||||||||
| 1 | 16.95 | 28.75 | |||||||||||||
| 1 | 67 | 7.07 | 44.13 | 496.85 | 4.23 | 1.13 | 0.99 | ||||||||
| 2 | 51.20 | 10.46 | 50.00 | ||||||||||||
| 1 | 76 | 8.01 | 38.95 | 665.61 | 4.41 | 1.18 | 0.98 | ||||||||
| 3 | 48.37 | 12.36 | 47.70 | ||||||||||||
| Type of Filters | Sol. No. | Parameter | Cost | THDI | THDV | PF | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 33 | 3.45 | 90.35 | 3461.57 | 4.80 | 1.26 | 0.98 | ||||||||
| 4 | 51.31 | 7.71 | 310.27 | 912.61 | |||||||||||
| 1 | 11 | 2.76 | 113.11 | 3651.03 | 4.85 | 1.19 | 0.99 | ||||||||
| 1 | 24.36 | 20.00 | |||||||||||||
| 4 | 84.75 | 8.32 | 277.42 | 845.70 | |||||||||||
| 1 | 48 | 3.51 | 88.76 | 3917.31 | 4.76 | 1.26 | 0.99 | ||||||||
| 2 | 86.77 | 34.27 | 34.49 | ||||||||||||
| 4 | 87.85 | 8.85 | 273.56 | 795.05 | |||||||||||
| 1 | 01 | 3.57 | 87.28 | 3983.80 | 4.58 | 1.23 | 0.99 | ||||||||
| 3 | 99.91 | 16.86 | 53.82 | ||||||||||||
| 4 | 81.59 | 9.76 | 260.48 | 720.92 | |||||||||||
| Type of Filters | Sol. No. | Parameter | Cost | THDI | THDV | PF | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 46 | 3.23 | 96.51 | 913.74 | 3.63 | 1.84 | 0.99 | ||||||||
| 1 | 10.40 | 46.88 | |||||||||||||
| 2 | 22.20 | 10.02 | 189.74 | ||||||||||||
| 1 | 58 | 3.12 | 100.00 | 1345.24 | 3.83 | 1.88 | 0.99 | ||||||||
| 1 | 8.69 | 56.05 | |||||||||||||
| 3 | 28.82 | 19.80 | 142.50 | ||||||||||||
| 1 | 21 | 3.97 | 78.48 | 2078.88 | 3.84 | 1.41 | 0.98 | ||||||||
| 2 | 100.0 | 1.46 | 42.69 | ||||||||||||
| 4 | 24.14 | 50.00 | 274.03 | 140.72 | |||||||||||
| 1 | 66 | 4.85 | 64.31 | 1874.34 | 3.99 | 1.63 | 0.99 | ||||||||
| 3 | 25.21 | 2.14 | 59.11 | ||||||||||||
| 4 | 12.37 | 47.55 | 286.64 | 147.97 | |||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, N.-C.; Mehmood, D.; Lai, K.-Y. Multi-Objective Artificial Bee Colony Algorithm with Minimum Manhattan Distance for Passive Power Filter Optimization Problems. Mathematics 2021, 9, 3187. https://doi.org/10.3390/math9243187
Yang N-C, Mehmood D, Lai K-Y. Multi-Objective Artificial Bee Colony Algorithm with Minimum Manhattan Distance for Passive Power Filter Optimization Problems. Mathematics. 2021; 9(24):3187. https://doi.org/10.3390/math9243187
Chicago/Turabian StyleYang, Nien-Che, Danish Mehmood, and Kai-You Lai. 2021. "Multi-Objective Artificial Bee Colony Algorithm with Minimum Manhattan Distance for Passive Power Filter Optimization Problems" Mathematics 9, no. 24: 3187. https://doi.org/10.3390/math9243187
APA StyleYang, N.-C., Mehmood, D., & Lai, K.-Y. (2021). Multi-Objective Artificial Bee Colony Algorithm with Minimum Manhattan Distance for Passive Power Filter Optimization Problems. Mathematics, 9(24), 3187. https://doi.org/10.3390/math9243187