
Generalized Convexity Properties and Shape-Based Approximation in Networks Reliability


Abstract
:1. Introduction
- Computing the first non-trivial (different from zero) coefficient of the reliability polynomial of a network enables one to directly obtain the value of the last non-trivial (different from the binomial coefficient) coefficient of the reliability polynomial of the dual network.
- Adjusting approximated coefficients of a network can be done more efficiently when duality is considered, as more information is taken into account.
- The error of simultaneous approximation of two dual networks can be more accurately estimated when compared to a single network approximation.
1.1. Our Contribution
1.2. Outline of the Article
2. Preliminaries on Network Reliability
2.1. Matchstick Minimal Two-Terminal Networks
Matchstick Minimal Networks
- if there is a matchstick at position ;
- if there is no matchstick at position .
Hammock Networks
Duality Properties
2.2. Reliability Polynomial
- ;
- ;
Parallel-of-Series and Series-of-Parallel
3. Mutual Shape Properties of the Reliability Polynomials of Two Dual Networks
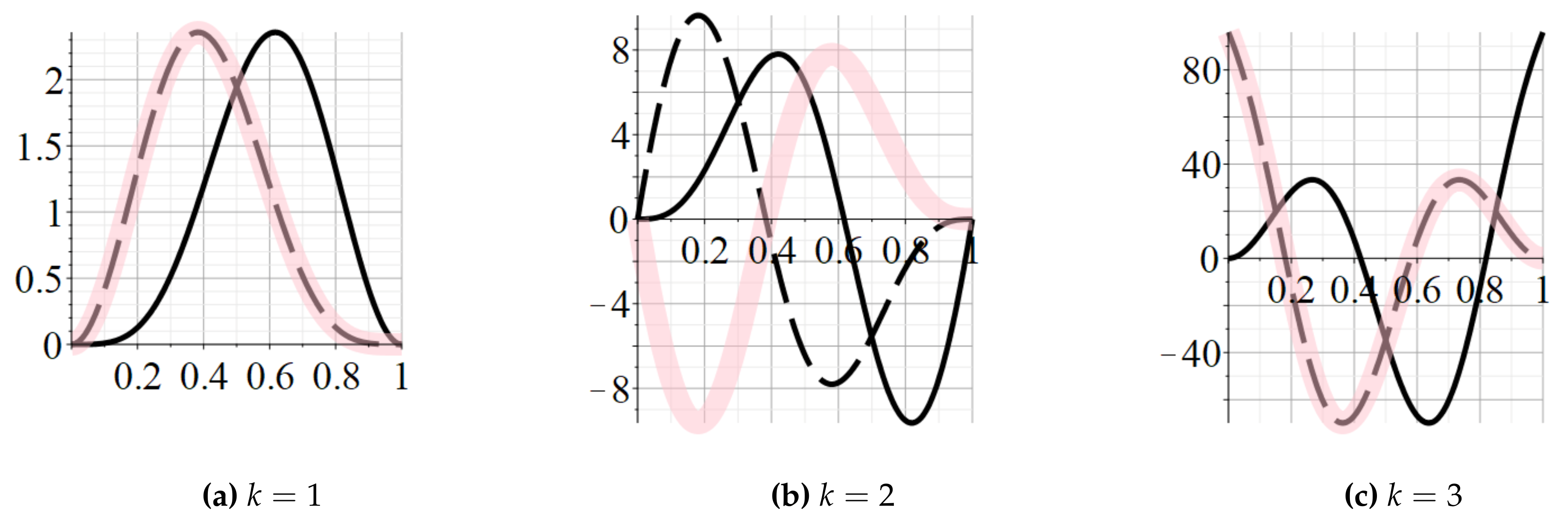
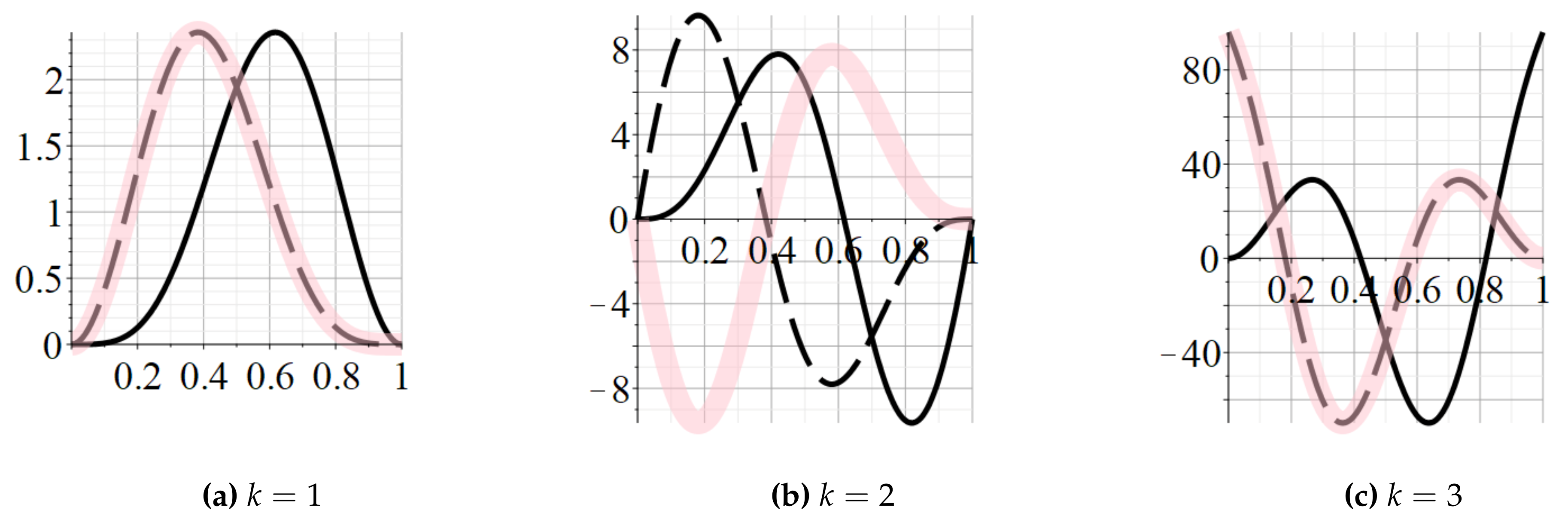
3.1. Convexity of High Order
3.2. Convexity Properties of the Reliability Polynomials of Two Dual Minimal Networks
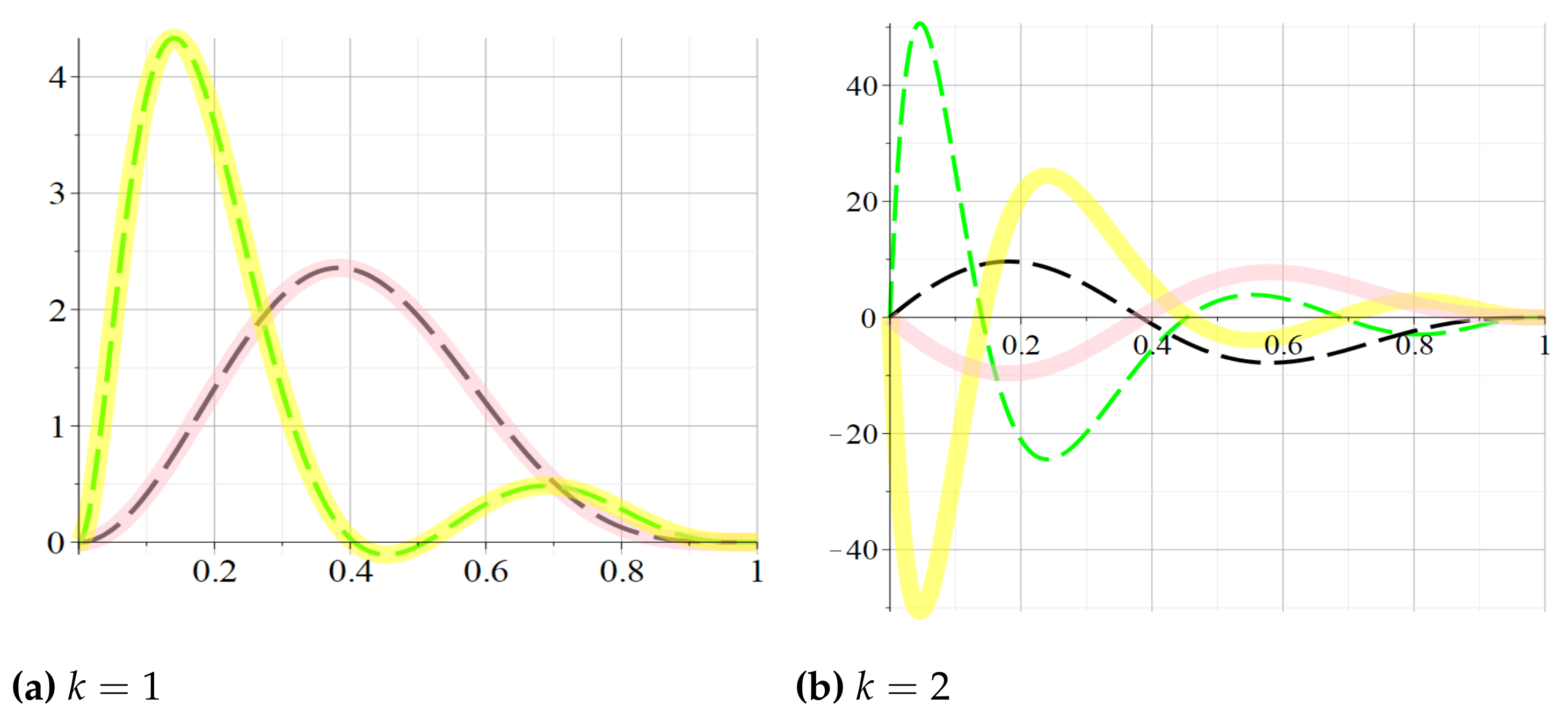
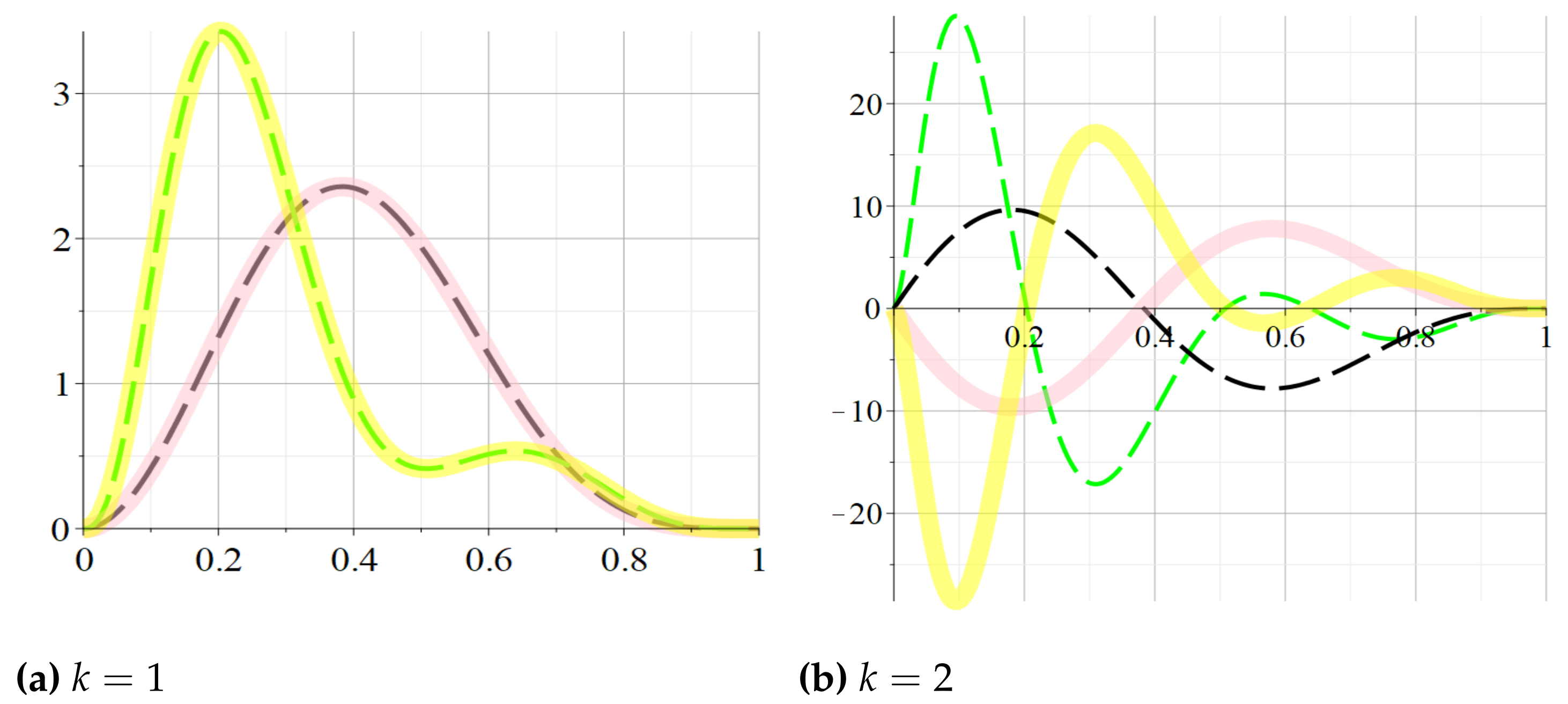
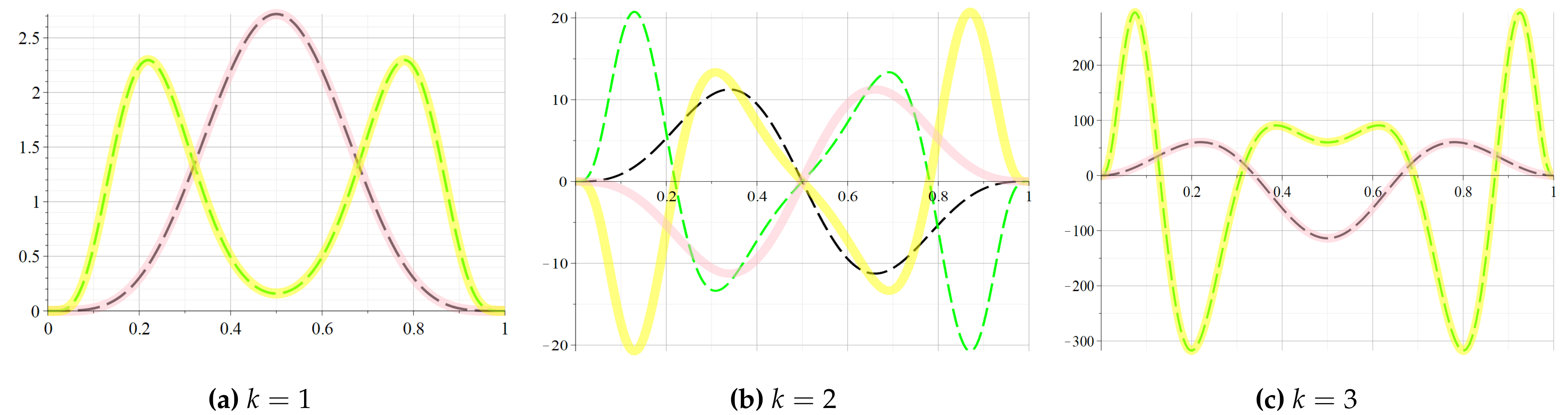
- 1.
- If k is odd, then and are -th order functions of the same type on each sub-interval of : either both are -th order convex or both are -th order concave.
- 2.
- If k is even then and are -th order functions of opposite types on each sub-interval of : if one polynomial is -th order convex then the other one is -th order concave, and conversely.
3.3. Extremal Properties of the Coefficients Functions
4. Shape-Preserving Simultaneous Approximation of the Reliability Polynomials of Two Dual Two-Terminal Networks
4.1. An Efficient Constructive Method
- Step 1.
- Compute the values of two coefficients and using some technique from literature. If and are chosen then we use the method from [11] and then we compute the values and using (4).Here, we put and .
- Step 2.
- Compute the coefficients of the approximate functions and , by
- Step 3.
- Step 4.
- Compute ,
- Step 5.
- Compute ,
- Step 6.
- Computefor each .
- Step 7.
- Compute , and .
- Step 8.
- If then replace , and put (or converse, if the dual coefficient is negative).
- Step 9.
- Output the approximation polynomials
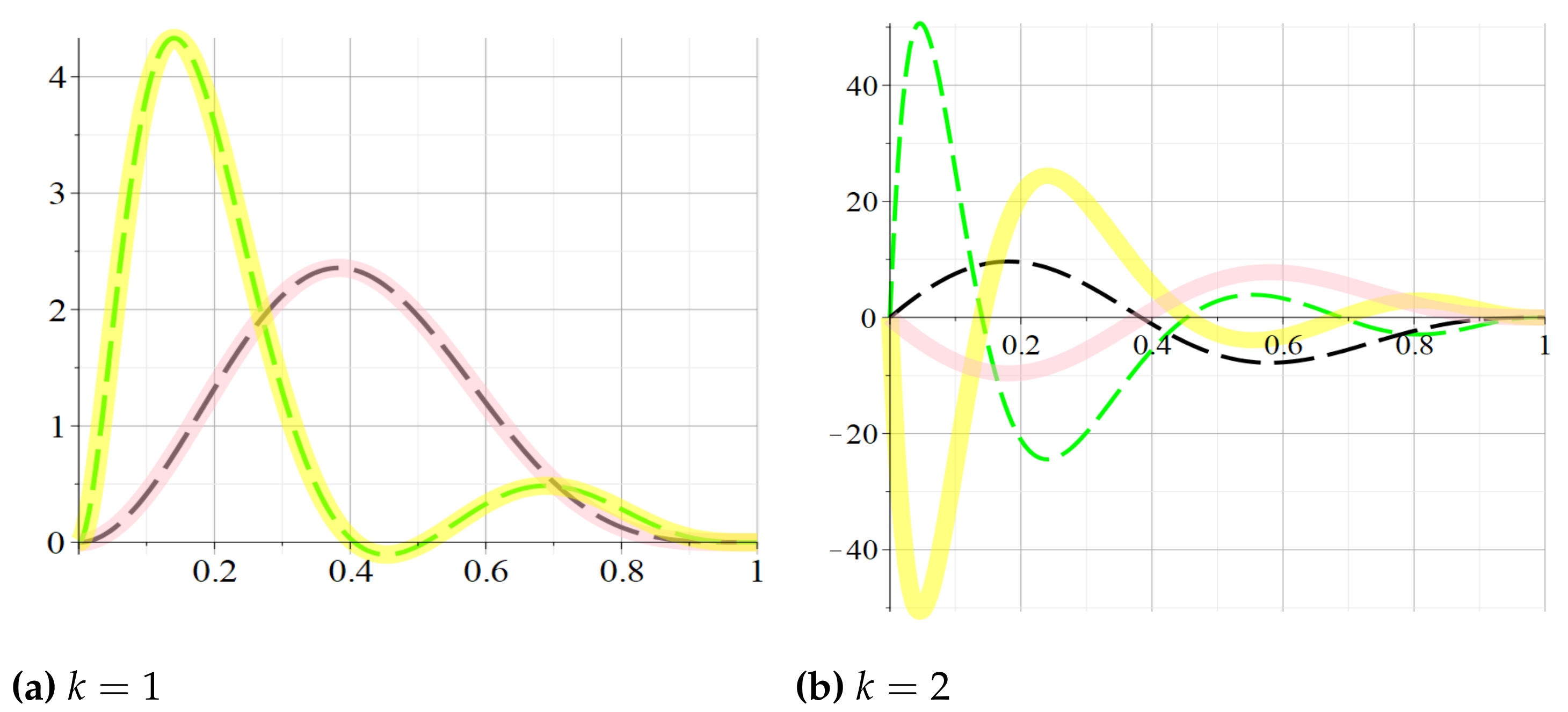
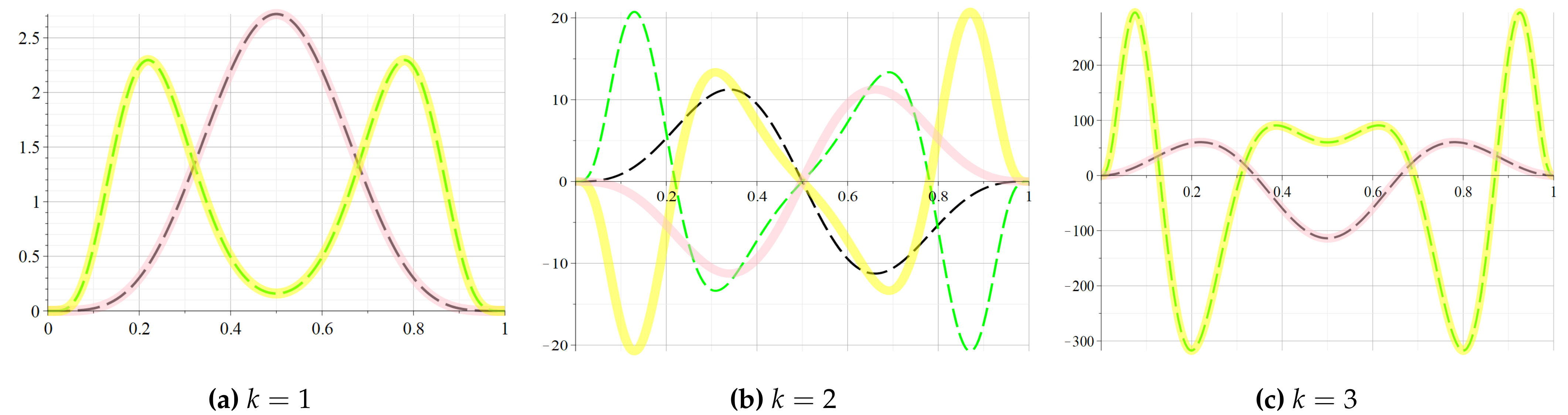
4.2. Shape and Extremum Properties of the Approximation Operator
- If and then and , which means that the approximant is concave. As one can see, Property 4 and Property 5 are valid. But , exceeding the upper bound from Property 7.
- If and , then and , which means that the approximant is convex. As neither Property 4, nor Property 5, nor Property 7 is valid.
- If and then and , which means that the approximant is concave, validating Property 4. But and also . It means that Property 5 is true, but Property 7 is not valid.
- If -dual and then and , which means that the approximant is convex. As neither Property 4, nor Property 5, nor Property 7 is valid.
- If -dual and then and , which means that the approximant is concave, validating Property 4. However, and also . It means that Property 5 is true, but Property 7 is not valid.
4.3. Error Estimation
5. Simulation Results
Properties of the Approximated Polynomials
- ;
- .
The Case of Self-Dual Networks
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brown, J.I.; Colbourn, C.J.; Cox, D.; Graves, C.; Mol, L. Network reliability: Heading out on the highway. Networks 2020, 77, 146–160. [Google Scholar] [CrossRef]
- Moore, E.F.; Shannon, C.E. Reliable circuits using less reliable relays—Part I. J. Frankl. Inst. 1956, 262, 191–208. [Google Scholar] [CrossRef]
- Moore, E.F.; Shannon, C.E. Reliable circuits using less reliable relays—Part II. J. Frankl. Inst. 1956, 262, 281–297. [Google Scholar] [CrossRef]
- von Neumann, J. Probabilistic Logics and the Synthesis of Reliable Organisms from Unreliable Components. In Automata Studies; Shannon, C.E., Ed.; Princeton University Press: Princeton, NJ, USA, 1956; pp. 43–98. [Google Scholar]
- Valiant, L. The Complexity of Enumeration and Reliability Problems. SIAM J. Comput. 1979, 8, 410–421. [Google Scholar] [CrossRef]
- Cristescu, G.; Drăgoi, V.F. Cubic Spline Approximation of the Reliability Polynomials of Two Dual Hammock Networks. Transylv. J. Math. Mech. 2019, 11, 77–90. [Google Scholar]
- Cristescu, G.; Drăgoi, V.F. Efficient Approximation of Two-Terminal Networks Reliability Polynomials Using Cubic Splines. IEEE Trans. Reliab. 2021, 70, 1193–1203. [Google Scholar] [CrossRef]
- Dăuş, L.; Jianu, M. Full Hermite interpolation of the reliability of a hammock network. Appl. Anal. Discret. Math. 2020, 14, 198–220. [Google Scholar] [CrossRef] [Green Version]
- Dăuş, L.; Jianu, M. The Shape of the Reliability Polynomial of a Hammock Network. In Intelligent Methods in Computing, Communications and Control; Dzitac, I., Dzitac, S., Filip, F.G., Kacprzyk, J., Manolescu, M.J., Oros, H., Eds.; Springer International Publishing: Cham, Swizerland, 2021; pp. 93–105. [Google Scholar]
- Drăgoi, V.F.; Beiu, V. Fast reliability ranking of matchstick minimal networks. Networks 2021, 1–22. [Google Scholar] [CrossRef]
- Cowell, S.R.; Beiu, V.; Dăuş, L.; Poulin, P. On the Exact Reliability Enhancements of Small Hammock Networks. IEEE Access 2018, 6, 25411–25426. [Google Scholar] [CrossRef]
- Drăgoi, V.F.; Beiu, V. Studying the Binary Erasure Polarization Subchannels Using Network Reliability. IEEE Commun. Lett. 2020, 24, 62–66. [Google Scholar] [CrossRef]
- Drăgoi, V.F.; Cristescu, G. Bhattacharyya Parameter of Monomial Codes for the Binary Erasure Channel: From Pointwise to Average Reliability. Sensors 2021, 21, 2976. [Google Scholar] [CrossRef] [PubMed]
- Popoviciu, T. Les fonctions convexes; Actualités Scientifiques et Industrielles: Paris, France, 1945. [Google Scholar]
- Hopf, E. Ueber die zusammenhänge zwischen gewissen höheren Differenzenquotienten reeller Funktionen eines Variablen und deren differenzierbarkeitseigenschaften. Ph.D. Thesis, Friedrich-Wilhelms Universitat zu Berlin, Berlin, Germany, 1926. [Google Scholar]
- Popoviciu, T. Sur le prolongement des fonctions convexes d’ordre supérieur. Bull. Math. Soc. Roum. Des Sc. 1934, 36, 75–108. [Google Scholar]
- Popoviciu, T. Sur l’approximation des fonctions convexes d’ordre supérieur. Mathematica (Cluj) 1935, 10, 49–54. [Google Scholar]
- Huh, J. h-Vectors of matroids and logarithmic concavity. Adv. Math. 2015, 270, 49–59. [Google Scholar] [CrossRef]
- Webster, R. Convexity; Oxford University Press: Oxford, UK, 1994. [Google Scholar]
- Lenz, M. The f-vector of a representable-matroid complex is log-concave. Adv. Appl. Math. 2013, 51, 543–545. [Google Scholar] [CrossRef]
- Cowell, S.R.; Dăuş, L.; Beiu, V.; Poulin, P. On hammock networks - sixty years after. In Proceedings of the 2017 12th International Conference on Design Technology of Integrated Systems In Nanoscale Era (DTIS), Palma de Mallorca, Spain, 4–6 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Cristescu, G.; Lupşa, L. Non-Connected Convexities and Applications; Springer: Berlin/Heidelberg, Germany, 2002; Volume 68. [Google Scholar]
- Lorentz, G.G. Bernstein Polynomials; University of Toronto Press: Totonto, ON, Canada, 1953. [Google Scholar]
- Natanson, I.P. Constructive Function Theory: Volume I: Uniform Approximation; Frederick Ungar Publishing Company: New York, NY, USA, 1964. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Networks and Reliability | |||
|---|---|---|---|
| two-terminal network | n | number of devices of a network | |
| MMN | matchstick minimal network | w | width of a network (length of the dual network) |
| series-of-parallel | l | length of a network (width of the dual network) | |
| parallel-of-series | p | probability that a device works | |
| MMN | reliability polynomial of | ||
| dual of | reliability polynomial of | ||
| Hammock network | coefficient of | ||
| Integers, Reals, and Incidence Matrices | |||
| set of natural numbers | set of real numbers | ||
| binomial coefficient | ⊕ | XOR (addition mod 2) operation | |
| set of binary matrices | all-ones/all-zeros matrix | ||
| matchstick incidence matrix of | bitwise complement of | ||
| Approximations | |||
| segmentary linear function of a -type MMN | quadratic spline functions that approximate | ||
| segmentary linear function of a -type MMN | quadratic spline functions that approximate | ||
| coefficients of | coefficients of | ||
| adjusted approximation of | adjusted approximation of | ||
| approximation of | approximation of | ||
| maximum point of function | maximum point of function | ||
| correction factor for the approximation | |||
| w | l | ||||
|---|---|---|---|---|---|
| 2 | 3 | 10 | 4 | ||
| 4 | 20 | 6 | |||
| 4 | 24 | 5 | |||
| 5 | 56 | 7 | |||
| 3 | 2 | 16 | 3 | ||
| 3 | 84 | 5 | |||
| 4 | 450 | 7 | |||
| 5 | 2443 | 9 | |||
| 4 | 2 | 62 | 4 | ||
| 2 | 66 | 4 | |||
| 3 | 698 | 7 | |||
| 4 | 7700 | 9 | |||
| 4 | 8312 | 9 | |||
| 5 | 88,948 | 11 | |||
| 5 | 2 | 244 | 5 | ||
| 3 | 5653 | 8 | |||
| 4 | 132,750 | 11 | |||
| 5 | 3,162,650 | 14 |
| s | ||||||
|---|---|---|---|---|---|---|
| 438 | 3072 | 13,178 | 15,468 | |||
| −265128 | 39523 | 1626302 | 1741992 | 0 |
| s | ||||||
|---|---|---|---|---|---|---|
| 36 | 510 | 3334 | 4816 | |||
| −36095 | 6390 | 450586 | 608704 | 0 |
| s | ||||||
|---|---|---|---|---|---|---|
| 994 | 8983 | 50796 | 53078 | |||
| −901834 | 888337 | 12504244 | 11493942 | 0 |
| 0 | 0 | 0 | 16 | 178 | 889 | 2562 | 4663 | 5653 | 4811 | 2982 | 1365 | 455 | 105 | 15 | 1 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Alg(l-1,n-w,n-w+1) | 0 | 0 | 0 | 455 | 1365 | 3003 | 4555 | 5352 | 5256 | 4266 | 2814 | 1365 | 455 | 105 | 15 | 1 | |
| Alg(l,n-w,n-w+1) | 0 | 0 | 0 | 16 | 1330 | 2803 | 4251 | 5208 | 5244 | 4358 | 2982 | 1365 | 455 | 105 | 15 | 1 | |
| 0 | 0 | 0 | 0 | 0 | 21 | 194 | 782 | 1772 | 2443 | 2114 | 1187 | 439 | 105 | 15 | 1 | ||
| Alg(w-1,n-l,n-l+1) | 0 | 0 | 0 | 0 | 0 | 189 | 738 | 1179 | 1082 | 449 | 0 | 0 | 0 | 105 | 15 | 1 | |
| Alg(w,n-l,n-l+1) | 0 | 0 | 0 | 0 | 0 | 21 | 646 | 1191 | 1227 | 753 | 200 | 34 | 439 | 105 | 15 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cristescu, G.; Drăgoi, V.-F.; Hoară, S.H. Generalized Convexity Properties and Shape-Based Approximation in Networks Reliability. Mathematics 2021, 9, 3182. https://doi.org/10.3390/math9243182
Cristescu G, Drăgoi V-F, Hoară SH. Generalized Convexity Properties and Shape-Based Approximation in Networks Reliability. Mathematics. 2021; 9(24):3182. https://doi.org/10.3390/math9243182
Chicago/Turabian StyleCristescu, Gabriela, Vlad-Florin Drăgoi, and Sorin Horaţiu Hoară. 2021. "Generalized Convexity Properties and Shape-Based Approximation in Networks Reliability" Mathematics 9, no. 24: 3182. https://doi.org/10.3390/math9243182
APA StyleCristescu, G., Drăgoi, V.-F., & Hoară, S. H. (2021). Generalized Convexity Properties and Shape-Based Approximation in Networks Reliability. Mathematics, 9(24), 3182. https://doi.org/10.3390/math9243182