Abstract
This paper mainly focuses on some notions of the lightlike rectifying curves and the centrodes in Minkowski 3-space. Some geometrical characteristics of the three types of lightlike curves are obtained. In addition, we obtain the conditions of the centrodes of the lightlike curves are the lightlike rectifying curves. Meanwhile, a detailed analysis between the N-type lightlike slant helices and the centrodes of lightlike curves is provided in this paper. We give the projections of the lightlike rectifying curves to the timelike planes.
1. Introduction
Despite its long history, curve theory is still one of the most important interesting topics in differential geometry [1,2,3,4,5,6,7,8,9,10,11]. The rectifying curves and the centrodes, which were introduced by B.Y. Chen in [3] and played important roles in mechanics, engineering, joint kinematics, as well as in differential geometry, had been given attention in various applications [3,4,5,8,9,11,12]. Thus far, many mathematicians have researched the characterizations of the non-lightlike rectifying curves in Euclidean space [3,4,5,11] and Lorentz–Minkowski space [9,12,13,14,15,16]. The relationship between a non-lightlike rectifying curve and the centrode of a non-lightlike curve was given in [5,12]. A necessary and sufficient condition for the centrodes in Euclidean 3-space was researched in [5].
Motivated from [6,7,9,17,18,19,20,21,22,23], there are many new geometrical properties of the lightlike curves compared with the spacelike curves and the timelike curves. In physics, the most important property of a lightlike curve is clear from the following fact: a classical relativistic string is a single lightlike curve [19,20]. Penrose indicated that null curves were null geodesics [22]. Hiscock revealed that the null hypersurfaces were a part of horizon [23].
However, until recently, to the best of our knowledge, there has been little information available in the literature concerning the lightlike rectifying curves. In the present paper, we pursue and describe the geometrical characteristics of lightlike rectifying curves in Minkowski 3-space. In addition, we obtain the relationship between centrodes of the lightlike curves and the N-type lightlike slant helices.
We organize the present manuscript as follows: the second section contains the basic notions of Minkowski 3-space and the Frenet frame of a lightlike curve in We focus on geometrical characteristics of the three types of lightlike curves (lightlike rectifying curves, lightlike normal curves, and lightlike osculating curves) in Section 3. The main conclusions (Theorems 1 and 4) describe the geometrical properties of the lightlike rectifying curves. For the remainder of this article, we show the relationship between the N-type lightlike slant helices and the centrodes of the lightlike curves in Section 4. In Section 5, we deal with the projection equations of the lightlike rectifying curves to the timelike planes. Finally, two examples and graphs are used to certify our main conclusions.
2. Preliminaries
Let be a three-dimensional vector space. For any vectors and in the pseudo scalar product of and is defined to be . is called Minkowski 3-space and written by
A vector in is called a spacelike vector, a lightlike vector or a timelike vector if is positive, zero, or negative, respectively. The norm of a vector is defined by For any two vectors and in we call pseudo-perpendicular to if The pseudo vector product of vectors and is defined by
where is the canonical basis of . One can easily show that . For a real number we define the hyperplane with pseudo normal vector by We call a spacelike hyperplane, a timelike hyperplane or a lightlike hyperplane if is a timelike, spacelike or lightlike vector, respectively.
Definition 1.
Let be a curve with the Frenet frame , where is the tangent vector, is the normal vector, and is the binormal vector. is called a lightlike curve, a spacelike curve or a timelike curve if its tangent vector is a lightlike vector, spacelike vector, or timelike vector for , respectively.
Definition 2.
Let be a curve with the Frenet frame . Then, is said to be a rectifying curve if it satisfies ; in other words, the position vector always lies in its rectifying plane. As the same method, is said to be a normal curve or an osculating curve if or , respectively.
A lightlike curve with the Frenet frame , satisfies
The Frenet Equations of are given as follows [18]:
where and are called the curvature function and torsion function of , respectively.
3. Three Types of the Lightlike Curves
In this section, we consider some geometrical properties of the three types of lightlike curves (lightlike rectifying curves, lightlike normal curves, and lightlike osculating curves). Meanwhile, a necessary and sufficient condition of the lightlike rectifying curves is given in Theorem 4.
Theorem 1.
Let be a lightlike curve with the Frenet frame , , and the following statements are equivalent:
(1): is a lightlike rectifying curve in .
(2): The tangential component of the position vector of the curve is given by and , where are constants. When , ; when , .
(3): The distance function satisfies for constants .
(4): The curvatures satisfy one of the following conditions: or .
Proof.
A lightlike rectifying curve can be shown that
Differentiating the above equation
implies that
Solving the equations, and imply that and .
Substitute the to the middle equation of Equations (3), Hence, statement (2) is established.
Conversely, from statement (2), we obtain
By the Frenet Equations (1), is obvious for . The curve is a lightlike rectifying curve. For the other case, by the same method, statement (1) and statement (2) are equivalent.
Since , , where are constants. It is obvious that statement (2) and statement (3) are equivalent.
From Equations (3), , and . Hence,
which indicates statement (4).
Conversely, supposing , and , it shows that
Differentiating the above equation,
The equation is obvious by and Equation (1). Hence, the curve is a lightlike rectifying curve.
When , is obtained by Equation (3). The curve is a lightlike rectifying curve. Hence, statement (1) and statement (4) are equivalent. we complete the proof. □
In the following, we would like to obtain the geometrical properties of the other two types of lightlike curves in .
Theorem 2.
If the curve is a lightlike normal curve with in , the curvatures should satisfy , where .
Proof.
Let be a lightlike curve with the Frenet frame , if it is a normal curve, we can write
Differentiate the equation
and
Note that and . Substitute the to the third equation of Equation (7), one can obtain . We complete the proof. □
Theorem 3.
There is no any lightlike osculating curve with in
Proof.
If be a lightlike osculating curve with in
Differentiate the equation
there is no any s satisfying the equation.
□
It is worth mentioning that the important applications of the rectifying curves used in mathematic and physics [4,9,11,12] in .
Theorem 4.
Let be a lightlike curve with in , then is a lightlike rectifying curve if and only if when is a unit speed curve in ; or when is a unit speed curve in .
Proof.
Let be a lightlike rectifying curve with . According to Theorem 1, the distance function of the curve satisfies for some constants . Making a suitable parameter t, we have for constant C.
Define a curve in by
and
Differentiate the equation with respect to t,
and
where is the pseudo unit speed function of the spherical curve .
Let us put
for some translation, substituting in to Equation (8), is obtained.
When , choosing implies that
Conversely, supposing is a lightlike curve defined by , .
Then,
Since and are orthonormal vector fields, we can obtain that is lightlike curve and is a timelike unit curve in .
Suppose , , and , by the fact
we can obtain
As the same method as , we finish the proof. □
Remark 1.
By the same method as [8], if is a unit speed curve in or , for any constants C and , we have that is a lightlike rectifying curve in .
4. The Centrodes of Lightlike Curves
In this section, the centrodes of lightlike curves and the N-type lightlike slant helices in are given. Meanwhile, we obtain the relationship between the centrodes of lightlike curves and the N-type lightlike slant helices.
Definition 3.
For a curve with , the curve given by the Darboux vector is called the centrode of the curve .
Theorem 5.
The centrode of a lightlike curve is a lightlike rectifying curve, when the curvature and the torsion . As the same, when the centrode of a lightlike curve satisfies the torsion and the curvature , the lightlike curve is also a lightlike rectifying curve, where C is a constant.
Proof.
Supposing that is a lightlike curve with , we consider the centrode
Differentiate the equation above and use the Frenet Equations (1),
Case 1: when , we know and . Then, the tangent vector of and at the corresponding point are parallel. The position vector always lies in its rectifying plane. The centrode of is a lightlike curve. By Definition 2, the centrode is a lightlike rectifying curve.
Case 2: when , we know In addition, the tangent vector of is parallel to the binormal vector of . For the binormal vector is a lightlike vector, the centrode is a lightlike curve. The tangent vector field of and the binormal vector field of are parallel. The same as case 1, the centrode of the lightlike curve is also a rectifying curve. □
Definition 4.
Let be a lightlike curve with the Frenet frame . For a constant vector field satisfying , where C is constant, we call the curve be an N-type lightlike slant helix.
Theorem 6.
Let be an N-type lightlike slant helix in with if and only if the equation is established, where .
Proof.
Supposing a vector field , we obtain by Definition 4.
Differentiate the constant vector ,
and
Differentiate the second equation of Equations (12) and substitute the and to the first and third equation of Equation (12),
We obtain
Theorem 7.
Let be a lightlike curve in with . Then, the centrode is a rectifying curve and the curve is an N-type lightlike slant helix.
5. The Projections of the Lightlike Rectifying Curves
The projections of the non-lightlike curves onto the lightlike planes in were given in [9]. The lightlike curves belong to one of the lightlike planes in . In this section, we study the projections of the lightlike rectifying curves onto the timelike planes.
Theorem 8.
Let be a lightlike rectifying curve in and an orthogonal projection on the timelike plane. Then, we can obtain the parametrical as
where C is a constant.
Proof.
Let be an orthogonal projection of onto the timelike plane. Then, is given by
where is a spacelike vector; supposing for any another spacelike vector, we have the same method, and is a non-constant differentiable function. Assuming is a osculating curve on the timelike plane satisfying
Then, for . We know
By , one obtains
Case 1: when , where C is constant;
Case 2: when , where are constants;
Case 3: when , the curve is on the timelike plane, we omit it here.
In the following text, we only consider case 2, case 1 is a special case of case 2. When the arclength parameter of is
and
therefore,
We obtain
and
When or , the lightlike rectifying curve belongs to or , respectively.
In addition,
By the conditions and we have
Hence, ,
□
6. Some Examples
In this section, we give some examples about the lightlike rectifying curves to certify our main conclusions. The graphics of the lightlike rectifying curves and the centrodes are described in the following graphs. In addition, we give the projection graph of a lightlike rectifying curve to the timelike plane in Example 1.
Example 1.
For a lightlike curve with the Frenet frame , where
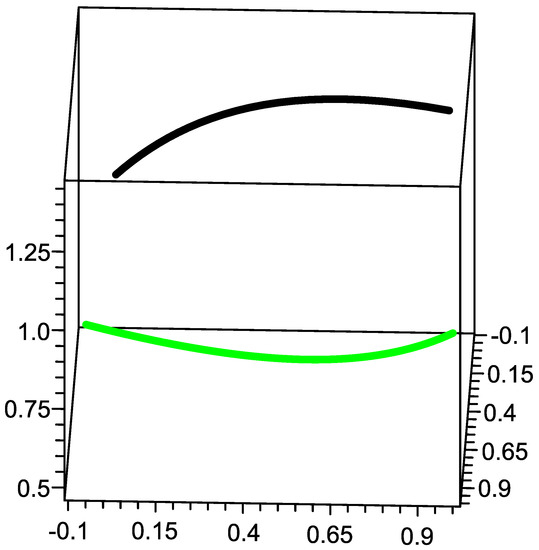
the projection equation of the lightlike rectifying curve to the timelike plane as
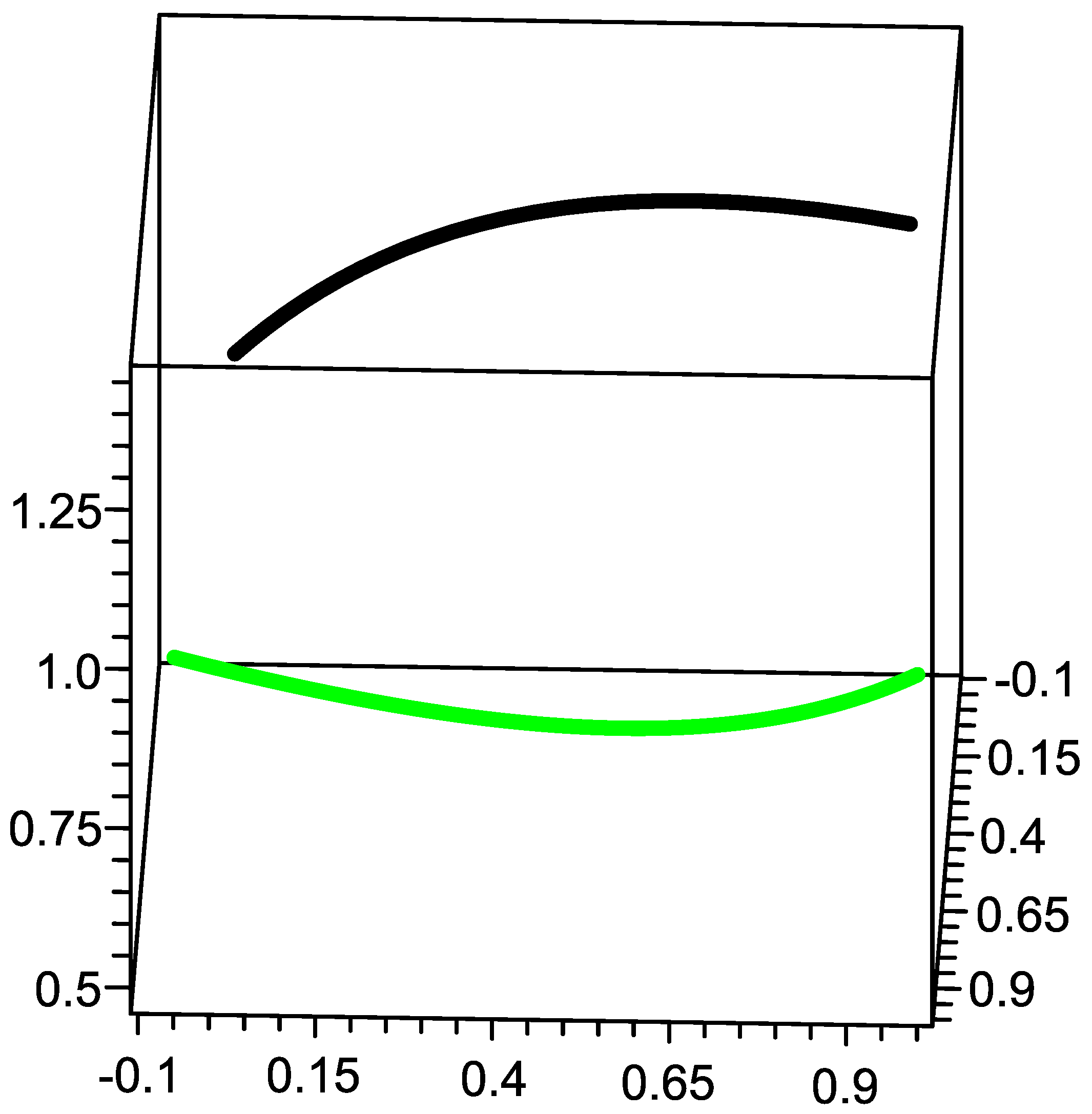
and the graph of the projection curve is in Figure 1.
Figure 1.
The lightlike rectifying curve (black curve) and the projection (green curve) in .
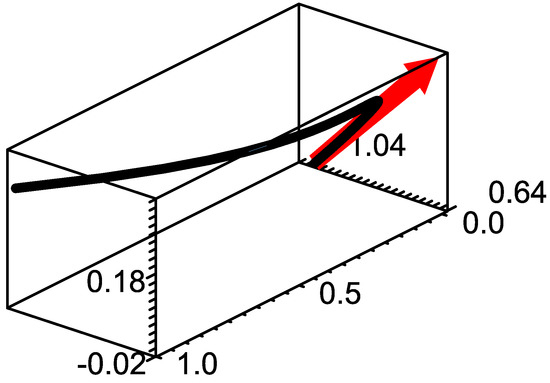
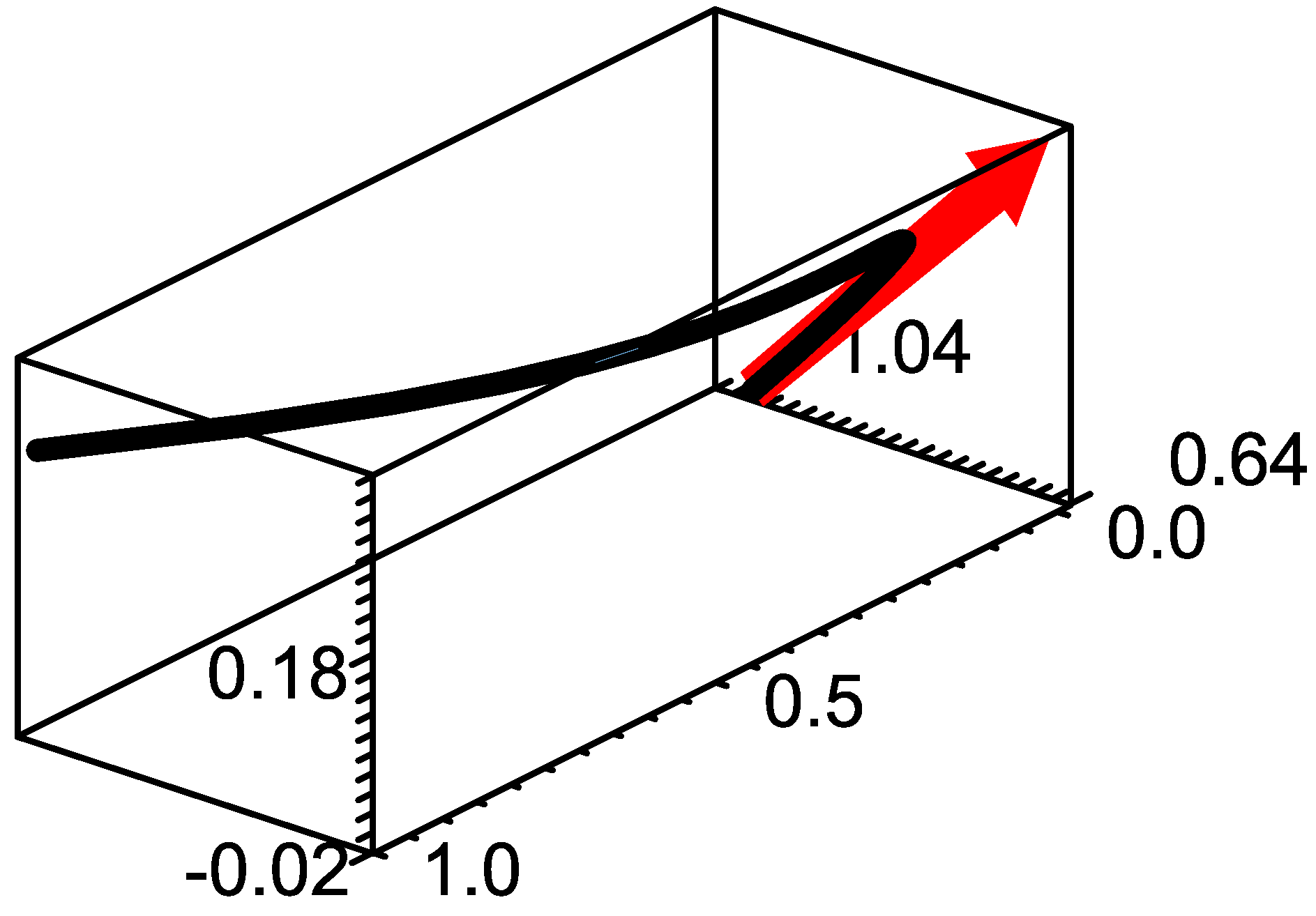
where the graph of the lightlike curve and the tangent vector are in Figure 2.
Figure 2.
The lightlike rectifying curve (black curve) with the tangent vector (red vector).
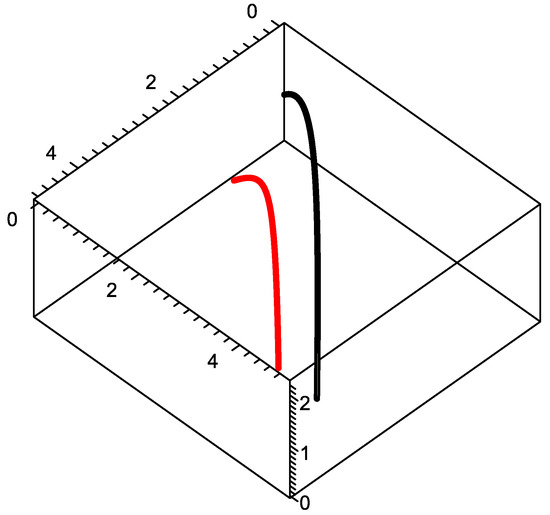
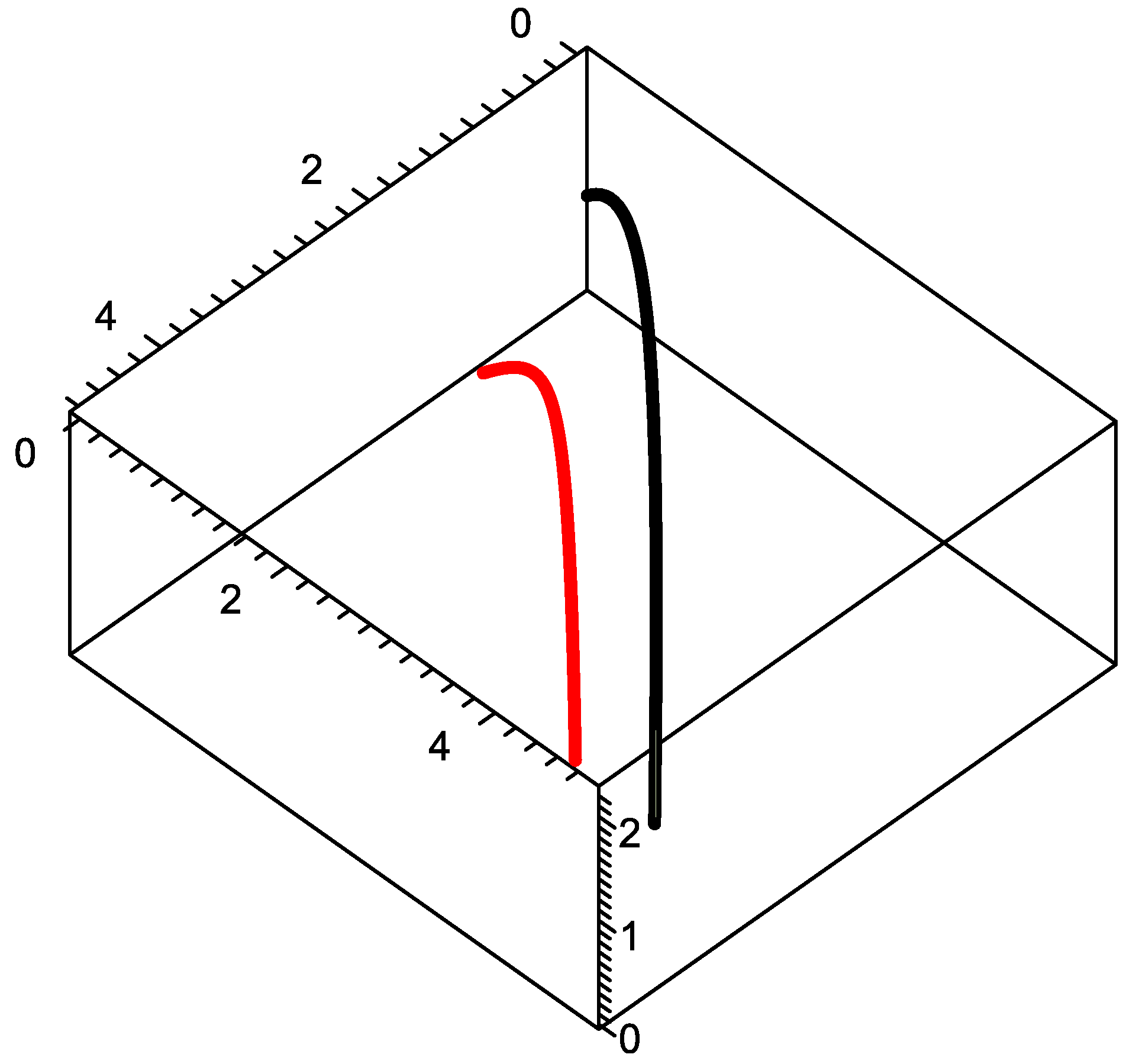
The curvatures are
The centrode of the lightlike curve is
the centrode of the lightlike curve is in Figure 3.
Figure 3.
The lightlike curve (black curve) and its centrode (red curve).
Example 2.
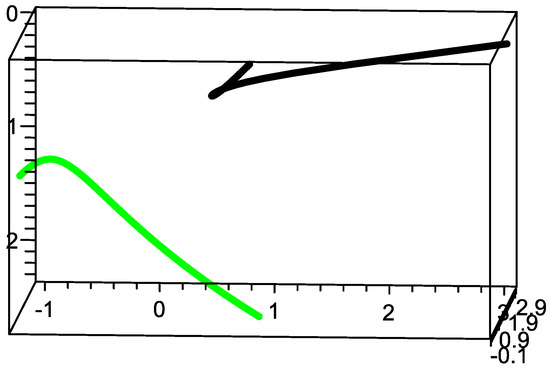
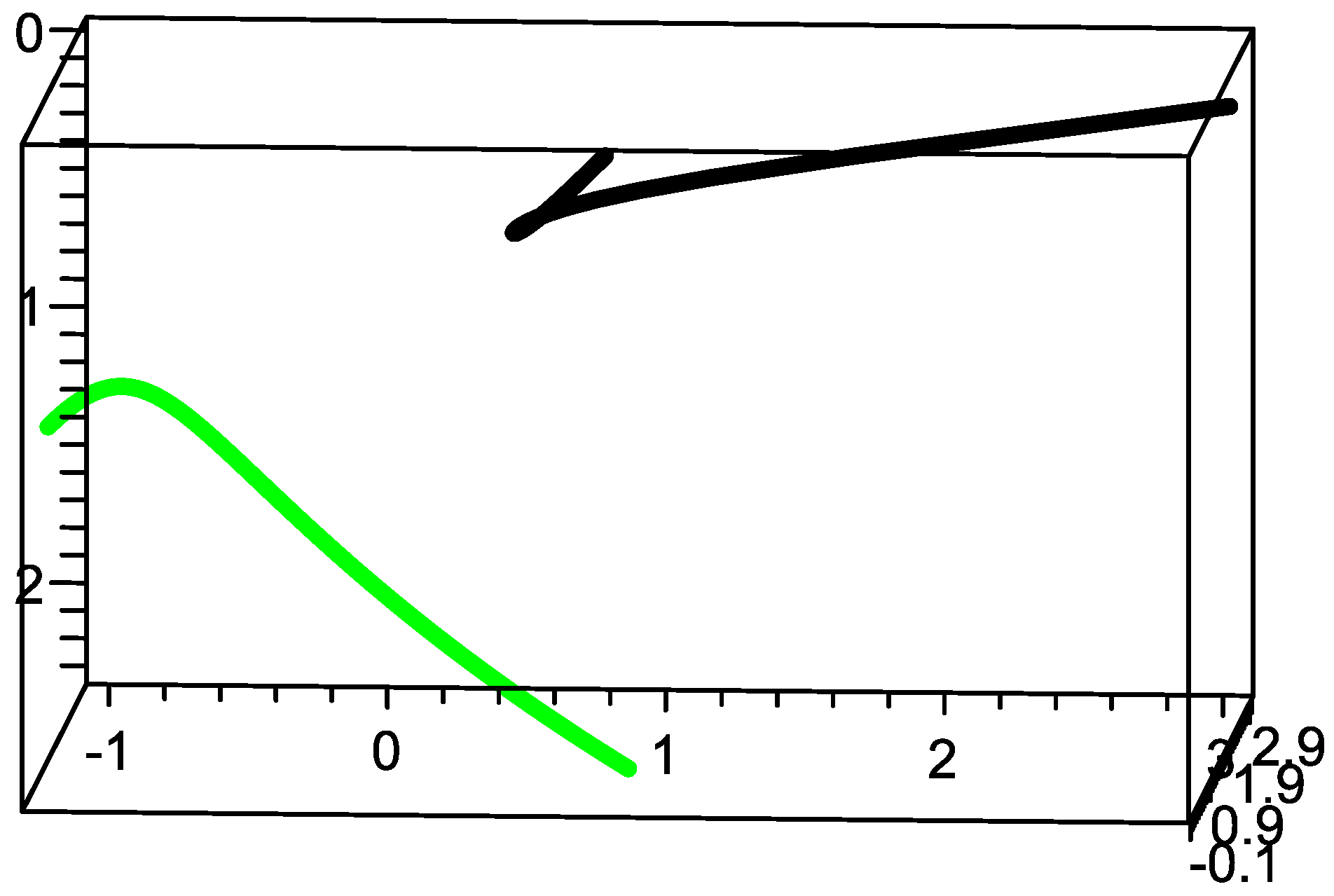
For a lightlike curve with the Frenet frame ,
the graph of the centrode of the lightlike curve is drawn in Figure 4.
Figure 4.
The lightlike curve (black curve) and its centrode (green curve).
7. Conclusions
This paper considered the geometrical properties of three types of lightlike curves in Minkowski 3-space (lightlike rectifying curves, lightlike normal curves, and lightlike osculating curves). The lightlike rectifying curves are mainly studied. In addition, the conditions that the centrodes of the lightlike curves are the lightlike rectifying curves are obtained. Furthermore, we obtain the relationship between the N-type lightlike slant helices and the centrodes of lightlike curves. In addition, the projections of the lightlike rectifying curves to the timelike planes are researched.
In the following research, we will continue study the geometric properties of the lightlike rectifying curves in high dimensional spaces, such as in 4-space. Some unique geometric properties of curves in high dimensional space are desired to be obtained in the future.
Author Contributions
Writing—Original Draft Preparation, J.S.; Writing—Review and Editing, J.S., Y.Z.; Funding Acquisition, J.S., X.J. All authors have read and agreed to the published version of this manuscript.
Funding
The authors were supported by Shandong Provincial Natural Science Foundation (No. ZR2021MA052) and the National Natural Science Foundation of China (No. 11601520.)
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The first author is very grateful to Lyle Noakes for his effective suggestions on this paper during discussion at the University of Western Australia. The authors are supported by the Shandong Provincial Natural Science Foundation (No. ZR2021MA052).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bozkurt, Z.; Gök, Y.; Ekmekci, N. A new approach for magnetic curves in 3D Riemannian manifolds. J. Math. Phys. 2014, 55, 053501. [Google Scholar] [CrossRef]
- Cartan, E. Lecons sur la Geometrie des Espaces de Riemann; Gauthier Villars: Paris, France, 1946. [Google Scholar]
- Chen, B.Y. When does the position vector of a space curve always lie in its rectifying plane? Am. Math. Mon. 2003, 110, 147–152. [Google Scholar] [CrossRef]
- Chen, B.Y. Rectifying curves and geodesics on a cone in the Euclidean 3-space. Tamkang J. Math. 2017, 48, 209–214. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.Y.; Dillen, F. Rectifying curves as centrodes and extremal curves. Bull.-Inst. Math. Acad. Sin. 2005, 33, 77–90. [Google Scholar]
- Choi, J.H.; Kim, J.H. Associated curves of a Frenet curve and their applications. Appl. Math. Comput. 2012, 218, 9116–9124. [Google Scholar] [CrossRef]
- Choi, J.H.; Kim, J.H.; Ali, A.T. Some associated curves of Frenet non-lightlike curves in . J. Math. Anal. Appl. 2012, 394, 712–723. [Google Scholar] [CrossRef]
- Deshmukh, S.; Chen, B.Y.; Alshammari, S. On rectifying curves in Euclidean 3-space. Turk. J. Math. 2018, 42, 609–620. [Google Scholar] [CrossRef]
- Grovic, M.; Nesovic, E. Some relations between rectifying and normal curves in Minkowski 3-space. Math. Commun. 2012, 17, 655–664. [Google Scholar]
- Sun, J.G.; Jiang, X.Y.; Ji, F.H. Geometrical Properties of the Pseudo null Hypersurfaces in Semi-Euclidean 4-Space. Mathematics 2021, 9, 1274. [Google Scholar] [CrossRef]
- Lucas, P.; Ortega-Yagües, J.A. Rectifying curves in the three-dimensional sphere. J. Math. Anal. Appl. 2015, 421, 1855–1868. [Google Scholar] [CrossRef]
- Jie, H.; Pei, D. Singular Special Curves in 3-Space Forms. Mathematics 2020, 8, 846. [Google Scholar] [CrossRef]
- İlarslan, K.; Nesovic, E.; Petrovic-Torgasev, M. Some characterizations of rectifying curves in the Minkowski 3-space. Novi Sad J. Math. 2003, 33, 23–32. [Google Scholar]
- Du, L.; Zhang, J. Show citation Classification of f-Biharmonic Curves in Lorentz–Minkowski Space. J. Math. 2020, 2020, 7529284. [Google Scholar] [CrossRef]
- Iqbal, Z.; Sengupta, J. Null (Lightlike) f-Rectifying Curves in the Three Dimensional Minkowski 3-Space. Fundam. J. Math. Appl. 2020, 3, 8–16. [Google Scholar] [CrossRef]
- Yayli, Y.; Gök, I.; Hacisalihoǧlu, H.H. Extended rectifying curves as new kind of modified darboux vectors. TWMS J. Pure Appl. Math. 2018, 9, 18–31. [Google Scholar]
- Cöken, A.C.; ÜCiftci, A.C. On the Cartan curvatures of a null curve in Minkowski spacetime. Geom. Dedicata 2005, 114, 71–78. [Google Scholar] [CrossRef]
- Duggal, K.L.; Jin, D.H. Null Curves and Hypersurfaces of Semi-Riemannian Manifolds; World Scientific: New York, NY, USA, 2007. [Google Scholar]
- Neill, B.O. Semi-Riemannian Geometry with Application to Relativity; Academic Press: New York, NY, USA, 1983. [Google Scholar]
- Sakaki, M. Notes on null curves in Minkowski spaces. Turk. J. Math. 2010, 34, 417–424. [Google Scholar]
- Jiang, X.Y.; Sun, J.G. Local geometric properties of the lightlike Killing magnetic curves in de Sitter 3-space. AIMS Math. 2021, 6, 12543–12559. [Google Scholar] [CrossRef]
- Penrose, R. Gravitational collapse and space-time singularities. Phys. Rev. Lett. 1965, 14, 57–62. [Google Scholar] [CrossRef] [Green Version]
- Hiscock, W.A. Models of evaporating black holes. I. Phys. Rev. D 1981, 23, 2813–2822. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).