
Symmetry Preserving Discretization of the Hamiltonian Systems with Holonomic Constraints

Abstract
1. Introduction
2. Lie Symmetry of Hamiltonian Systems with Holonomic Constraints
2.1. The Equations of the Constrained Hamiltonian System
2.2. Infnitesimal Generators and the Prolongations
2.3. Lie Symmetries for Hamiltonian Systems
3. The Lie Symmetry-Preserving Difference Scheme for Hamiltonian Systems with Holonomic Constraints
3.1. Invariance of Difference Equations of Hamiltonian Systems
3.2. The Lie Symmetry-Preserving Difference Scheme for Hamiltonian Systems
4. Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dorodnitsyn, V. Transformation groups in net spaces. J. Sov. Math. 1991, 55, 1490–1517. [Google Scholar] [CrossRef]
- Levi, D.; Winternitz, P. Continuous symmetries of difference equations. J. Phys. A Math. Gen. 2006, 39, R1–R63. [Google Scholar] [CrossRef]
- Olver, P.J. Applications of Lie groups to Differential Equations, 2nd ed.; Springer: New York, NY, USA, 2000. [Google Scholar]
- Dorodnitsyn, V.; Kozlov, R.; Winternitz, P. Lie group classification of second-order ordinary difference equations. J. Math. Phys. 2000, 41, 480–504. [Google Scholar] [CrossRef]
- Campoamor-Stursberg, R.; Rodrgue, M.A.; Winternitz, P. Symmetry preserving discretization of ordinary differential equations: Large symmetry groups and higher order equations. J. Phys. A Math. Theor. 2016, 49, 035201. [Google Scholar] [CrossRef]
- Shi, D.H.; Berchenko-Kogan, Y.; Zenkov, D.V.; Bloch, A.M. Hamel’s Formalism for infinite-dimensional mechanical systems. J. Nonlinear Sci. 2016, 27, 1–43. [Google Scholar] [CrossRef]
- Kozlov, R.; Kozlov, R. Conservative difference schemes for one-dimensional ows of polytropic gas. Commun. Nonlinear Sci. 2019, 78, 104864. [Google Scholar] [CrossRef]
- Zadra, M.; Mansfield, E.L. Using Lie group integrators to solve two and higher dimensional variational problems with symmetry. J. Comput. Dyn. 2019, 6, 485–511. [Google Scholar] [CrossRef]
- Sahadevan, R.; Nagavigneshwari, G. Continuous symmetries of certain nonlinear partial difference equations and their reductions. Phys. Lett. A 2014, 378, 3155–3160. [Google Scholar] [CrossRef]
- Liu, H.; Li, J. Symmetry reductions, dynamical behavior and exact explicit solutions to the Gordon types of equations. J. Comput. Appl. Math. 2014, 257, 144–156. [Google Scholar] [CrossRef]
- Zhislin, G.M. On the discrete spectrum of the Hamiltonians of n-particle systems with n in function spaces with various permutation symmetries. Funct. Anal. Appl. 2015, 49, 148–150. [Google Scholar] [CrossRef]
- Fu, J.L.; Chen, B.Y.; Chen, L.Q. Noether symmetries of discrete nonholonomic dynamical systems. Phys. Lett. A 2009, 373, 409–412. [Google Scholar] [CrossRef]
- Xia, L.L.; Bai, L. Preservation of adiabatic invariants for disturbed Hamiltonian systems under variational discretization. Acta Mech. 2020, 231, 783–793. [Google Scholar] [CrossRef]
- Payen, G.; Denis, M.; Ghislain, H. Modelling and structure-preserving discretization of Maxwell’s equations as port-Hamiltonian system. IFAC Pap. 2020, 53, 7581–7586. [Google Scholar] [CrossRef]
- Verstappen, R.W.C.P.; Veldman, A.E.P. Symmetry-preserving discretization of turbulent flow. J. Comput. Phys. 2003, 187, 343–368. [Google Scholar] [CrossRef]
- Bourlioux, A.; Rebelo, R.; Winternitz, P. Symmetry preserving discretization of SL (2, ℝ) invariant equations. J. Nonlinear Math. Phys. 2008, 15, 362–372. [Google Scholar] [CrossRef]
- Ozbenli, E.; Vedula, P. Construction of invariant compact finite-difference schemes. Phys. Rev. E 2020, 101, 023303. [Google Scholar] [CrossRef]
- Guermond, J.L.; Popov, B.; Tomas, I. Invariant domain preserving discretization-independent schemes and convex limiting for hyperbolic systems. Comput. Method. Appl. Mech. 2018, 347, 143–175. [Google Scholar] [CrossRef]
- Dorodnitsyn, V. Applications of Lie Groups to Difference Equations; Chapman and Hall/CRC: Raton, FL, USA, 2011. [Google Scholar]
- Ozbenli, E.; Vedula, P. Numerical solution of modified differential equations based on symmetry preservation. Phys. Rev. E 2017, 96, 063304. [Google Scholar] [CrossRef]
- Levi, D.; Martina, L.; Winternitz, P. Conformally invariant elliptic Liouville equation and its symmetry preserving discretization. Theor. Math. Phys. 2018, 196, 1307–1319. [Google Scholar] [CrossRef]
- Winternitz, P. Symmetries of Discrete Systems; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Rebelo, R.; Valiquette, F. Invariant discretization of partial differential equations admitting infinite dimensional symmetry groups. J. Differ. Equ. Appl. 2015, 21, 285–318. [Google Scholar] [CrossRef]
- Dorodnitsyn., V.; Kozlov, R.; Meleshko, S.V. One-dimensional gas dynamics equations of a polytropic gas in Lagrangian coordinates: Symmetry classification, conservation laws, difference schemes. Commun. Nonlinear Sci. 2019, 74, 201–218. [Google Scholar] [CrossRef]
- Dorodnitsyn, V.; Kaptsov, E.I. Shallow water equations in Lagrangian coordinates: Symmetries, conservation laws and its preservation in difference models. Commun. Nonlinear Sci. 2020, 89, 105343. [Google Scholar] [CrossRef]
- Zhang, H.B.; Lv, H.S.; Gu, S.L. The Lie point symmetry-preserving difference scheme of holonomic constrained mechanical systems. Acta Phys. Sin. 2010, 59, 5213–5218. [Google Scholar]
- Baumann, G. Symmetry analysis of differential equations using MathLie. Math. Comput. Model. 2002, 25, 1052–1069. [Google Scholar]
- Abdigapparovich, N.O. Lie algebra of infinitesimal generators of the symmetry group of the heat equation. J. Appl. Math. Phys. 2018, 6, 373–381. [Google Scholar] [CrossRef]
- Carminati, J.; Devitt, J.S.; Greg, J.F. Isogroups of differential equations using algebraic computing. J. Symb. Comput. 1992, 14, 103–120. [Google Scholar] [CrossRef][Green Version]
- Carminati, J.; Vu, K. Symbolic computation and differential equations: Lie symmetries. J. Symb. Comput. 2000, 29, 95–116. [Google Scholar] [CrossRef]
- Filho, T.; Figueiredo, A. [SADE] a maple package for the symmetry analysis of differential equations. Comput. Phys. Commun. 2011, 182, 467–476. [Google Scholar] [CrossRef]
- Cheviakov, A.F. GeM software package for computation of symmetries and conservation laws of differential equations. Comput. Phys. Commun. 2007, 176, 48–61. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
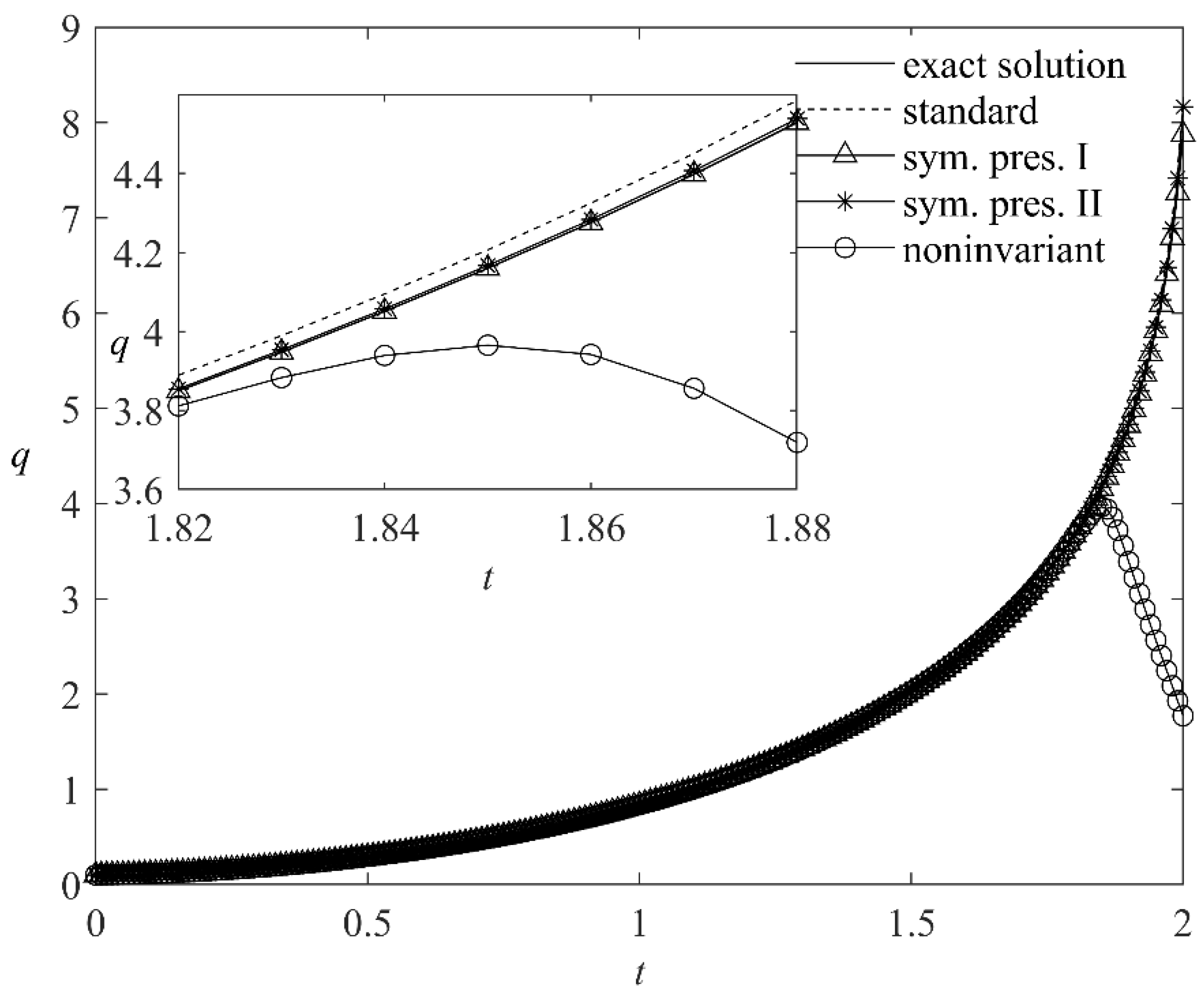
| Scheme | t = 1.2 | t = 1.4 | t = 1.6 |
|---|---|---|---|
| Exact solution | 1.199773 | 1.698965 | 2.428005 |
| Sym.pres. I | 1.199750 | 1.698918 | 2.427891 |
| Sym.pres. II | 1.200082 | 1.699542 | 2.429250 |
| Standard | 1.208324 | 1.711019 | 2.446514 |
| Scheme | Standard | Sym.pres. I | Sym.pres. II |
|---|---|---|---|
| Elapsed time | 0.192247 | 0.165179 | 0.159947 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, L.; Wu, M.; Ge, X. Symmetry Preserving Discretization of the Hamiltonian Systems with Holonomic Constraints. Mathematics 2021, 9, 2959. https://doi.org/10.3390/math9222959
Xia L, Wu M, Ge X. Symmetry Preserving Discretization of the Hamiltonian Systems with Holonomic Constraints. Mathematics. 2021; 9(22):2959. https://doi.org/10.3390/math9222959
Chicago/Turabian StyleXia, Lili, Mengmeng Wu, and Xinsheng Ge. 2021. "Symmetry Preserving Discretization of the Hamiltonian Systems with Holonomic Constraints" Mathematics 9, no. 22: 2959. https://doi.org/10.3390/math9222959
APA StyleXia, L., Wu, M., & Ge, X. (2021). Symmetry Preserving Discretization of the Hamiltonian Systems with Holonomic Constraints. Mathematics, 9(22), 2959. https://doi.org/10.3390/math9222959