
Theoretical Disquisition on the Static and Dynamic Characteristics of an Adaptive Stepped Hydrostatic Thrust Bearing with a Displacement Compensator

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Modeling
3. Static Characteristics of the Thrust Bearing
3.1. Setting the Parameters of the “Calculated Point” Mode
3.2. Static Characteristics and their Discussion
4. Dynamic Characteristics of the Thrust Bearing
4.1. Linear Model of Thrust Bearing Dynamics
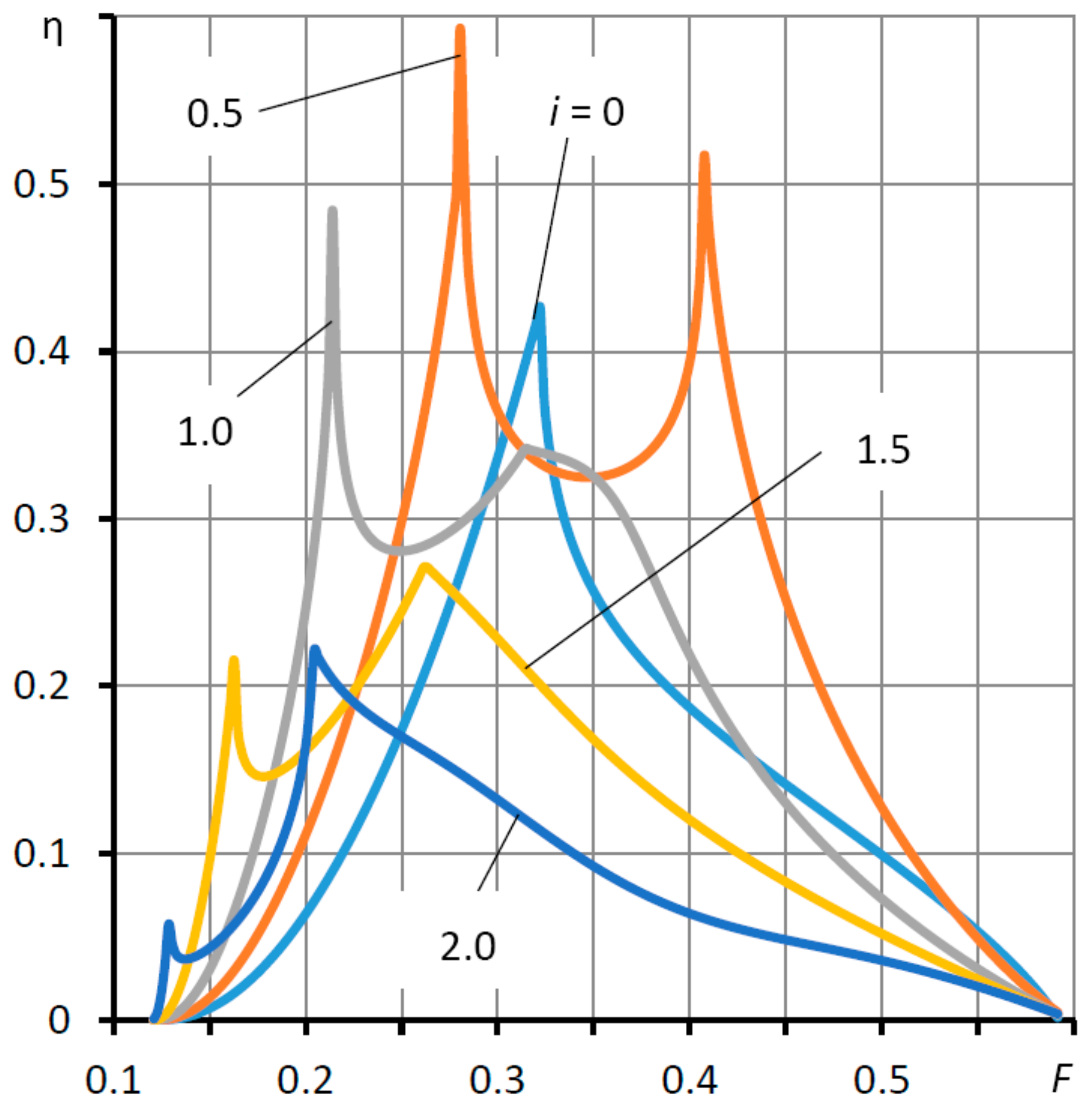
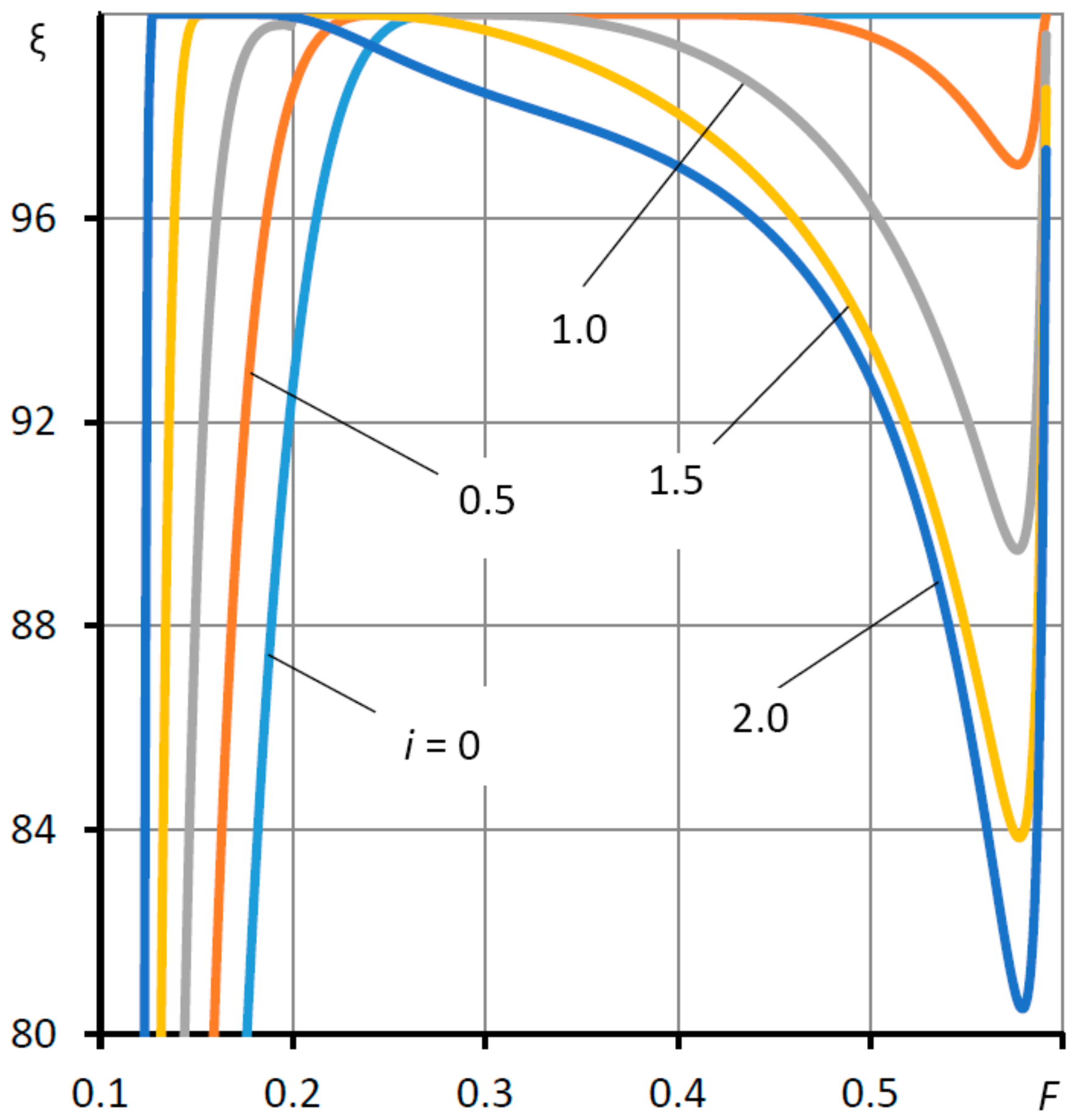
4.2. Quality Criteria of the Linear Dynamic System
- -
- The degree of stability where si are the zeros of the characteristic polynomial of the dynamical system, which is the polynomial of the denominator of the transfer function (42).
- -
- The damping of oscillations for a period where β is the imaginary part of the root of the characteristic equation with the largest real part.
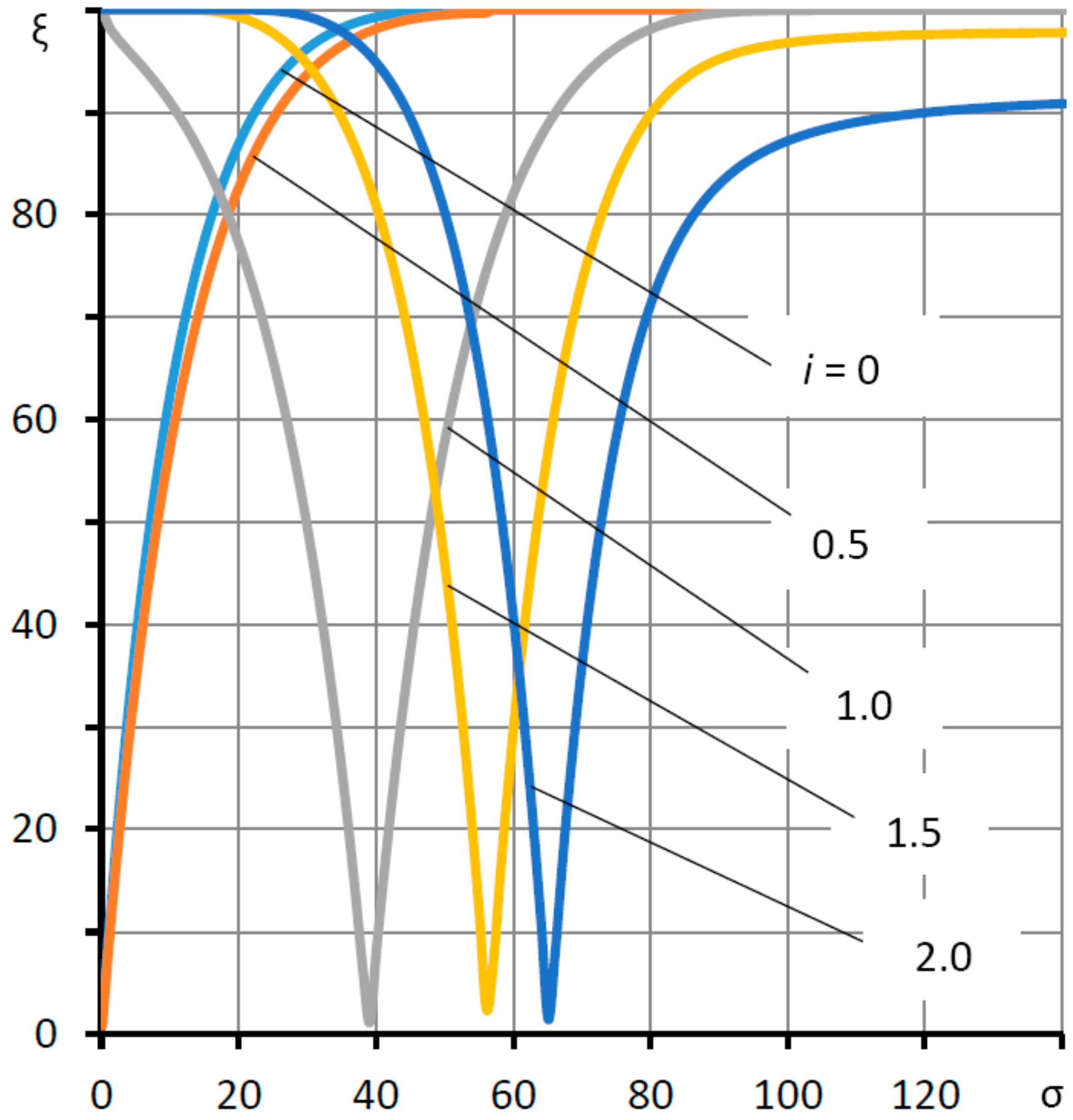
4.3. Dynamic Characteristics of the Thrust Bearing and their Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| H, h | dimensionless thickness, thickness of the gap |
| Ht | dimensionless thickness of the step gap |
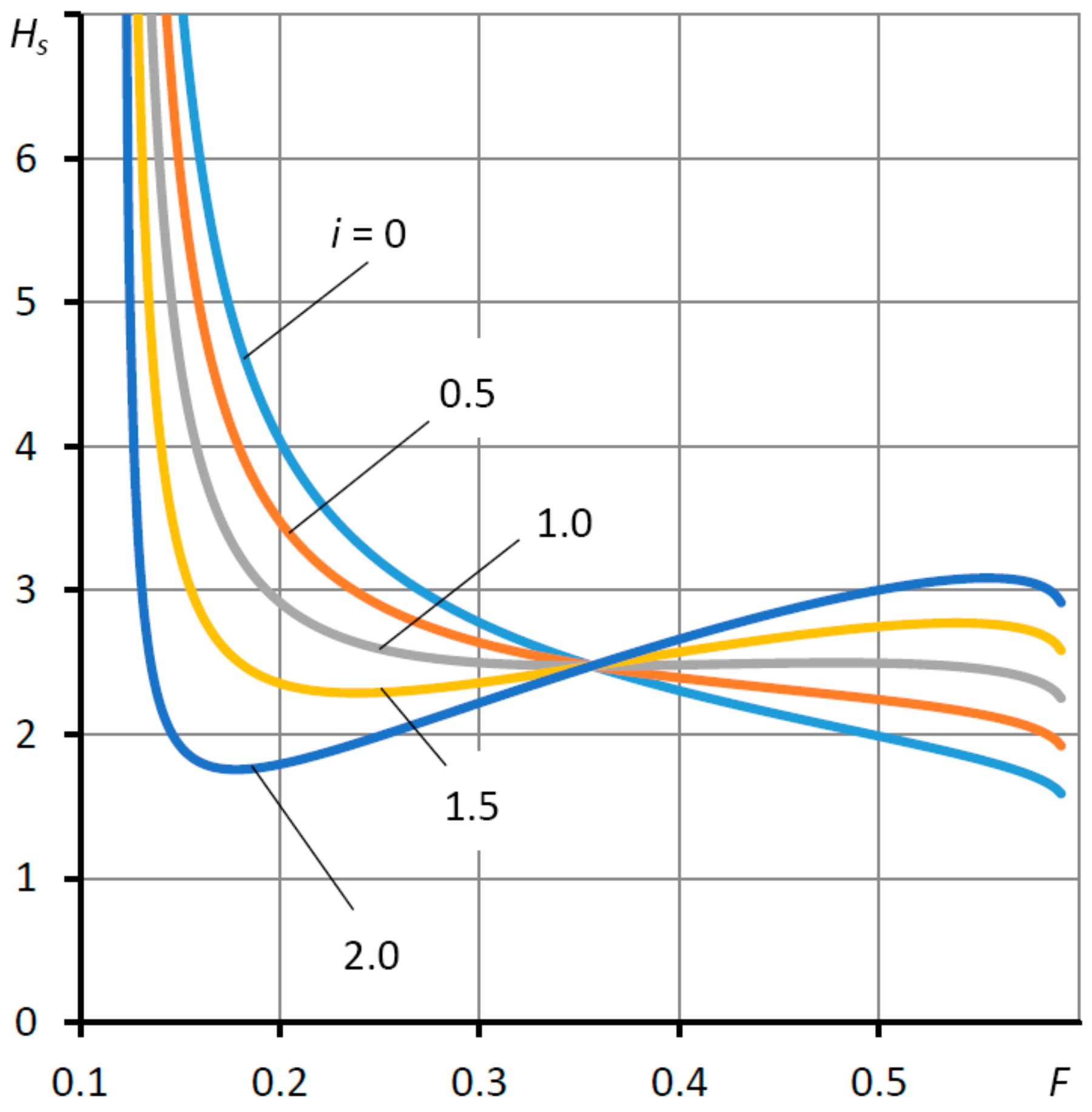
| Hs | dimensionless thickness of the total gap |
| ε | dimensionless deformation of elastic ring 4 |
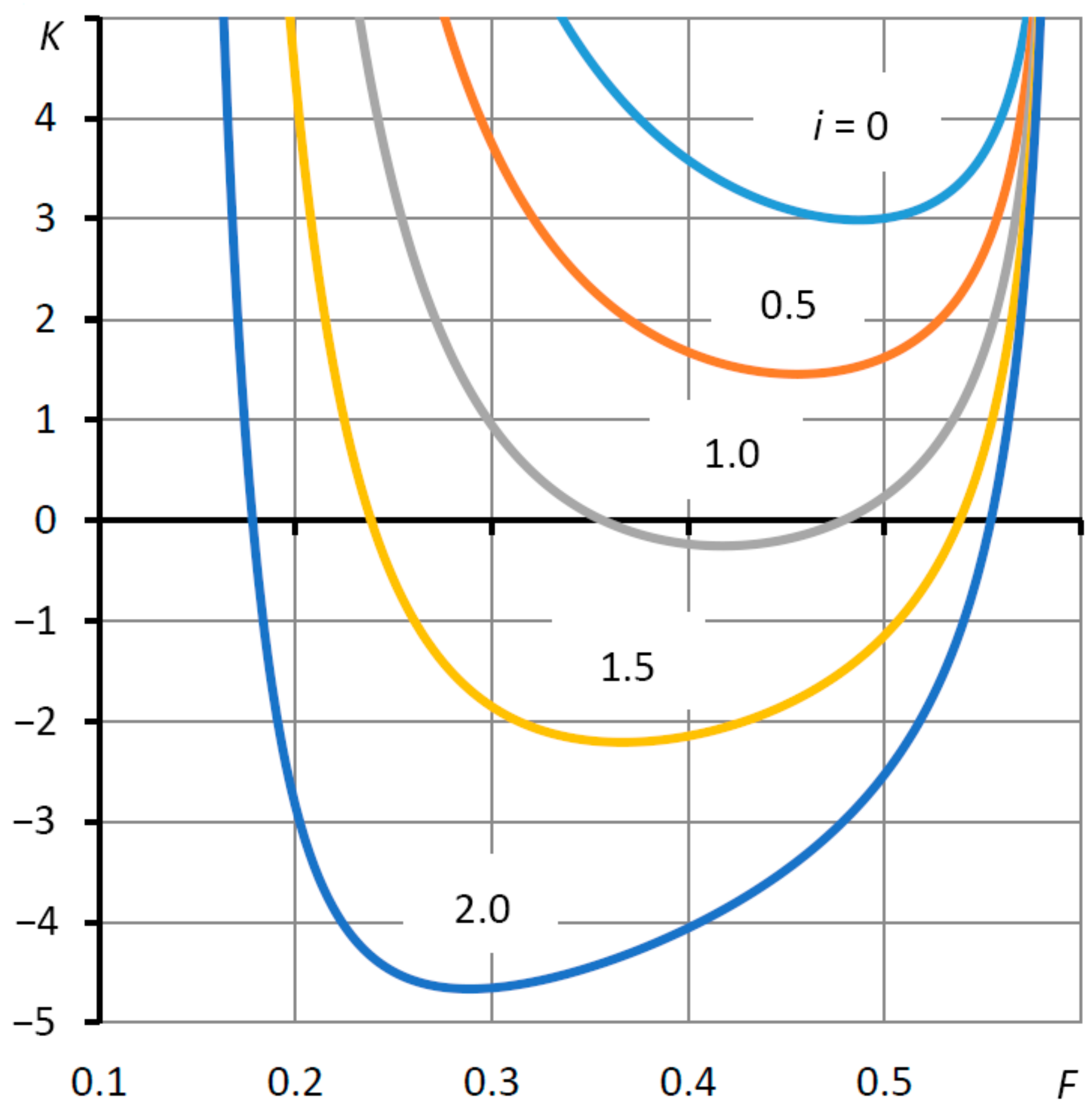
| K, Ke | dimensionless compliance of bearing and elastic ring 4 |
| P (R,τ) | dimensionless dynamic pressure in the bearing gap |
| pt | lubricant pressure at the junction of the step and the ledge |
| ps | supply pressure |
| Qh | dimensionless flow rate through the gap |
| Qt | dimensionless flow rate at the entrance to the gap Ht |
| Qs | dimensionless flow rate at the outlet of the gap Hs |
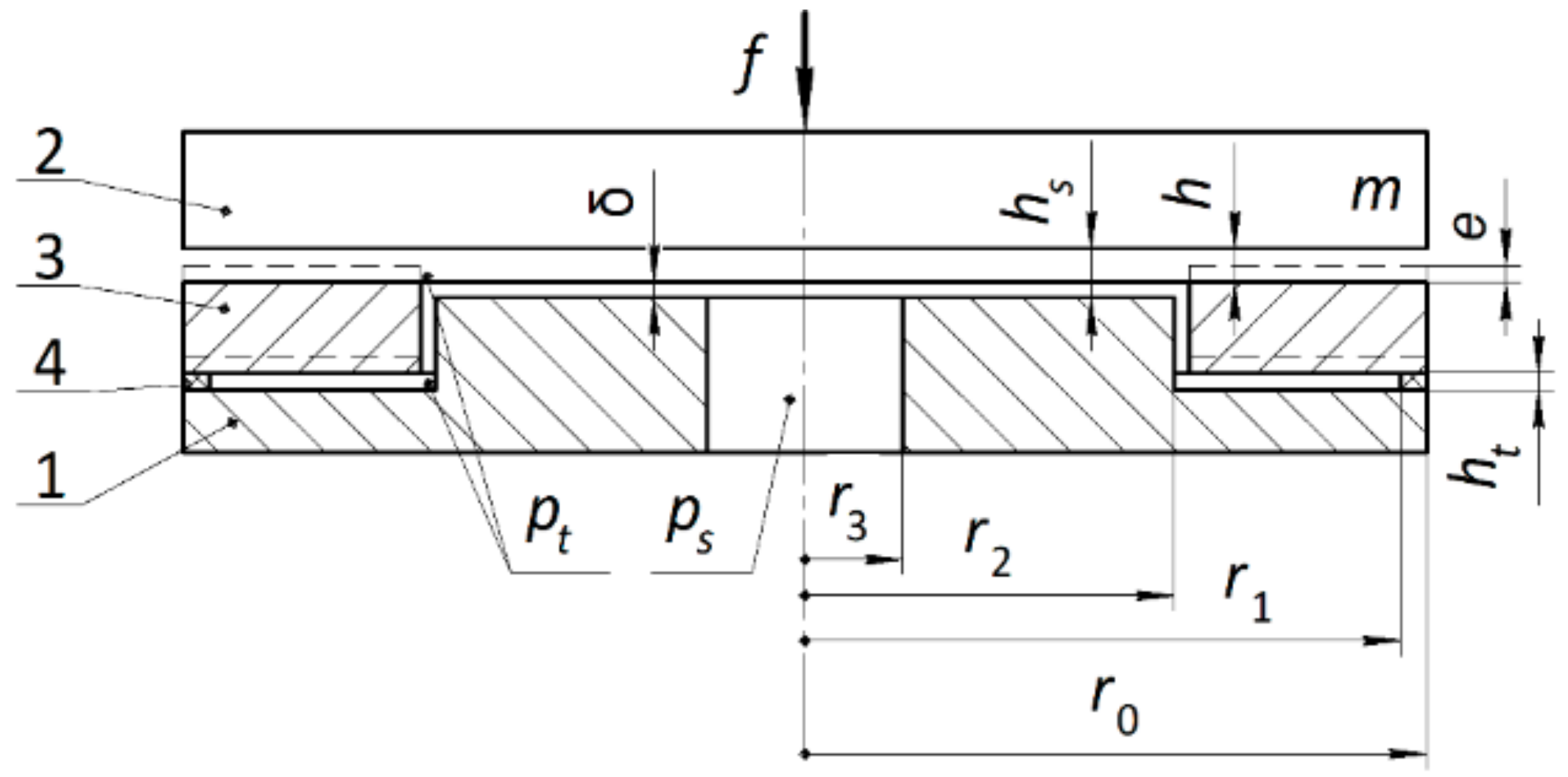
| r0, r1, r2, r3 | bearing radii (Figure 1) |
| R | dimensionless radius |
| t0 | current time scale |
| W | dimensionless load capacity |
| δ | step height |
| μ | coefficient of dynamic viscosity of the lubricant |
| χ | normalized adjustment coefficient of the external throttling system |
| σ | “compression number” |
| τ | dimensionless time |
References
- Stachowiak, G.W.; Batchelor, A.W. (Eds.) 6—Hydrostatic Lubrication. In Engineering Tribology, 3rd ed.; Butterworth-Heinemann: Burlington, VT, USA, 2006; pp. 261–285. [Google Scholar]
- Shatokhin, S.; Tyurikov, A.; Petrov, A. Calculation of the static characteristics of the step hydrostatic thrust bearing. In Quality, Reliability and Durability in Mechanical Engineering; Krasnoyarsk Polytechnic Institute Publishing House: Krasnoyarsk, Russia, 1970; pp. 23–27. [Google Scholar]
- Shatokhin, S.; Tyurikov, A.S.; Tsaregorodtsev, M. Increasing the stiffness of the step hydrostatic thrust bearing. In New Equipment and Methods of Its Application in the National Economy; Krasnoyarsk Polytechnic Institute Publishing House: Krasnoyarsk, Russia, 1972; pp. 11–17. [Google Scholar]
- Berthe, D.; Dowson, D.; Godet, M.; Taylor, C.M. Fluid Film Lubrication—Osborne Reynolds Centenary; Elsevier: Leeds, UK, 1986; Volume 11, 706p. [Google Scholar]
- Tyurikov, A.; Borisov, V. Study of the static characteristics of the step hydrostatic thrust bearing. In Improving the Accuracy and Productivity of Machining on Machine Tools; Krasnoyarsk Polytechnic Institute Publishing House: Krasnoyarsk, Russia, 1973; pp. 31–39. [Google Scholar]
- Scharrer, J.; Hibbs, R.; San Andres, L. The asymmetrically stepped, orifice compensated hydrostatic bearing. In Proceedings of the 28th Joint Propulsion Conference and Exhibit, Nashville, TN, USA, 6–8 July 1992. [Google Scholar] [CrossRef]
- Rowe, W.B. (Ed.) Ten—hydrostatic and hybrid plain journal bearings. In Hydrostatic and Hybrid Bearing Design; Butterworth-Heinemann: Burlington, VT, USA, 1983; pp. 154–166. [Google Scholar]
- Tyurikov, A.; Shatokhin, S. Dynamic characteristics of a thrust stepped hydrostatic bearing. In Sliding Bearings with an External Pressure Source; Krasnoyarsk Polytechnic Institute Publishing House: Krasnoyarsk, Russia, 1974; pp. 8–16. [Google Scholar]
- Hemingway, E. A performance investigation into the elastically stepped and shrouded thrust bearing. Proc. Inst. Mech. Eng. 1967, 182, 769–782. [Google Scholar] [CrossRef]
- Mikula, A. Further test results of the leading-edge-groove (leg) tilting pad thrust bearing. J. Tribol. 1988, 110, 174–179. [Google Scholar] [CrossRef]
- Rao, P.S.; Agarwal, S. Theoretical Study of Couple Stress Fluid Film in Rough Step Slider Bearing with Assorted Porous Structures. J. Nanofluids 2018, 7, 92–99. [Google Scholar] [CrossRef]
- Hossain, M.Z.; Razzaque, M.M. Load capacity of a grooved circular step thrust bearing. J. Tribol. 2014, 136, 011705. [Google Scholar] [CrossRef]
- Johnstone, R.; Kirkham, E. Adaptive Control System for Machine Tool or the Like. US4514123A, 30 April 1985. [Google Scholar]
- Lee, J.; Dixon, W.E.; Ziegert, J.C. Adaptive nonlinear contour coupling control for a machine tool system. Int. J. Adv. Manuf. Technol. 2012, 61, 1057–1065. [Google Scholar] [CrossRef] [Green Version]
- Dullo, B. Precise determination of machine positioning. Precis. Eng. 1994, 16, 76. [Google Scholar] [CrossRef]
- Wada, T.; Sakurai, M.; Ogura, A. Tool wear in cutting of sintered iron material. J. Jpn. Soc. Powder Powder Metall. 2001, 48, 386–391. [Google Scholar] [CrossRef]
- Budak, E. Analytical models for high performance milling. Part I: Cutting forces, structural deformations and tolerance integrity. Int. J. Mach. Tools Manuf. 2006, 46, 1478–1488. [Google Scholar] [CrossRef] [Green Version]
- Adamczak, S.; Zmarzły, P.; Janecki, D. Theoretical and practical investigations of v-block waviness measurement of cylindrical parts. Metrol. Meas. Syst. 2015, 22, 181–192. [Google Scholar] [CrossRef]
- Watanabe, T.; Iwai, S. Designs of an adaptive control constraint system of a milling machine tool. In Computer Aided Design of Multivariable Technological Systems; Elsevier: Amsterdam, The Netherlands, 1983; pp. 553–564. [Google Scholar]
- Legaev, V. Analysis of the influence of the design parameters of a controlled-type aerostatic support on stability. Proc. Universities. Mech. Eng. 2005, 3, 16–28. [Google Scholar]
- Legaev, V. Mathematical model of a gas-static support with built-in adjustable nozzles. Sov. J. Vestn. Mashinostroyeniya 2005, 7, 8–12. [Google Scholar]
- Cowley, A.; Kher, A. The dynamic characteristics of a hydrostatically supported spindle bearing system. In Advances in Machine Tool Design and Research 1969; Tobias, S.A., Koenigsberger, F., Eds.; Pergamon: Oxford, UK, 1970; pp. 437–451. [Google Scholar]
- Chen, K.; Yang, H.; Yang, G.; Wang, X. A system approach to the dynamic characteristics of hydrostatic bearings used on machine tools. Int. J. Mach. Tool Des. Res. 1980, 20, 287–297. [Google Scholar] [CrossRef]
- Shatokhin, S.; Kodnyanko, V. Load and Flow Rate Characteristics of an Axial Pressurized Gas Bearing with an Active Compensation of Gas Flow; Springer: Berlin, Germany, 2017; pp. 110–115. [Google Scholar]
- Shatokhin, S.; Kodnyanko, V. Radial gasostatic bearing-seal with opposite internal gas flow compensation. Sov. J. Frict. Wear 1984, 5, 32–35. [Google Scholar]
- Kodnyanko, V.; Shatokhin, S.; Kurzakov, A.; Pikalov, Y. Mathematical modeling on statics and dynamics of aerostatic thrust bearing with external combined throttling and elastic orifice fluid flow regulation. Lubricants 2020, 8, 57. [Google Scholar] [CrossRef]
- Newgard, P.; Kiang, R. Elastic orifices for pressurized gas bearings. ASLE Trans. 1966, 9, 311–317. [Google Scholar] [CrossRef]
- Kodnyanko, V.; Pikalov, Y.; Shatokhin, S. Investigation of the characteristics of a gas-static bearing with active flow rate compensation. Bull. Mech. Eng. 1979, 4, 9–12. [Google Scholar]
- Kodnyanko, V.; Shatokhin, S.; Kurzakov, A.; Pikalov, Y.; Brungardt, M.; Strok, L.; Pikalov, I. Theoretical investigation on performance characteristics of aerostatic journal bearings with active displacement compensator. Appl. Sci. 2021, 11, 2623. [Google Scholar] [CrossRef]
- Kodnyanko, V. Method for calculating the static characteristics of radial hydrostatic compensator of machine tool bearings deformation. Period. Polytech. Transp. Eng. 2021, 49, 114–119. [Google Scholar] [CrossRef] [Green Version]
- Kodnyanko, V.; Belyakova, S.; Grigorieva, O.; Gogol, L.; Surovtsev, A.; Strok, L. The use of a displacement compensator for improve the static characteristics of a step hydrostatic thrust bearing. J. Res. Mech. Eng. 2021, 7, 11–16. [Google Scholar]
- Cameron, A.; Ettles, C.M.M. Basic Lubrication Theory, 3rd ed.; Horwood, E., Ed.; Ellis Horwood Series in Engineering Science; Halsted Press: Chichester, NY, USA, 1981; 256p. [Google Scholar]
- Demidovich, B.; Maron, I.; Shuvalova, E. Numerical Methods of Analysis. Approximation of Functions, Differential and Integral Equations, 5th ed.; Lan: Moscow, Russia, 2010; 400p. [Google Scholar]
- Ugural, A.C.; Fenster, S.K. Advanced Strength and Applied Elasticity; Pearson Education: London, UK, 2003; 471p. [Google Scholar]
- Besekersky, V.; Popov, E. Theory of Automatic Control Systems; Profession: Saint Petersburg, Russia, 2003; 752p. [Google Scholar]
- Ricardo, H. A Modern Introduction to Linear Algebra; CRC Press: New York, NY, USA, 2009; 670p. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kodnyanko, V.; Kurzakov, A.; Grigorieva, O.; Brungardt, M.; Belyakova, S.; Gogol, L.; Surovtsev, A.; Strok, L. Theoretical Disquisition on the Static and Dynamic Characteristics of an Adaptive Stepped Hydrostatic Thrust Bearing with a Displacement Compensator. Mathematics 2021, 9, 2949. https://doi.org/10.3390/math9222949
Kodnyanko V, Kurzakov A, Grigorieva O, Brungardt M, Belyakova S, Gogol L, Surovtsev A, Strok L. Theoretical Disquisition on the Static and Dynamic Characteristics of an Adaptive Stepped Hydrostatic Thrust Bearing with a Displacement Compensator. Mathematics. 2021; 9(22):2949. https://doi.org/10.3390/math9222949
Chicago/Turabian StyleKodnyanko, Vladimir, Andrey Kurzakov, Olga Grigorieva, Maxim Brungardt, Svetlana Belyakova, Ludmila Gogol, Alexey Surovtsev, and Lilia Strok. 2021. "Theoretical Disquisition on the Static and Dynamic Characteristics of an Adaptive Stepped Hydrostatic Thrust Bearing with a Displacement Compensator" Mathematics 9, no. 22: 2949. https://doi.org/10.3390/math9222949
APA StyleKodnyanko, V., Kurzakov, A., Grigorieva, O., Brungardt, M., Belyakova, S., Gogol, L., Surovtsev, A., & Strok, L. (2021). Theoretical Disquisition on the Static and Dynamic Characteristics of an Adaptive Stepped Hydrostatic Thrust Bearing with a Displacement Compensator. Mathematics, 9(22), 2949. https://doi.org/10.3390/math9222949