
Point Cloud Registration Based on Multiparameter Functional


Abstract
:1. Introduction
2. -Functional and Its Minimization
2.1. Information Matrices
2.2. NICP Functional and Its Decomposition
2.3. Definition of the -Functional
2.4. -Functional in Homogeneous Coordinates
2.5. Gradient of the -Functional
2.6. Projection of Affine Solution to Manifold and Translation Vector Revaluation
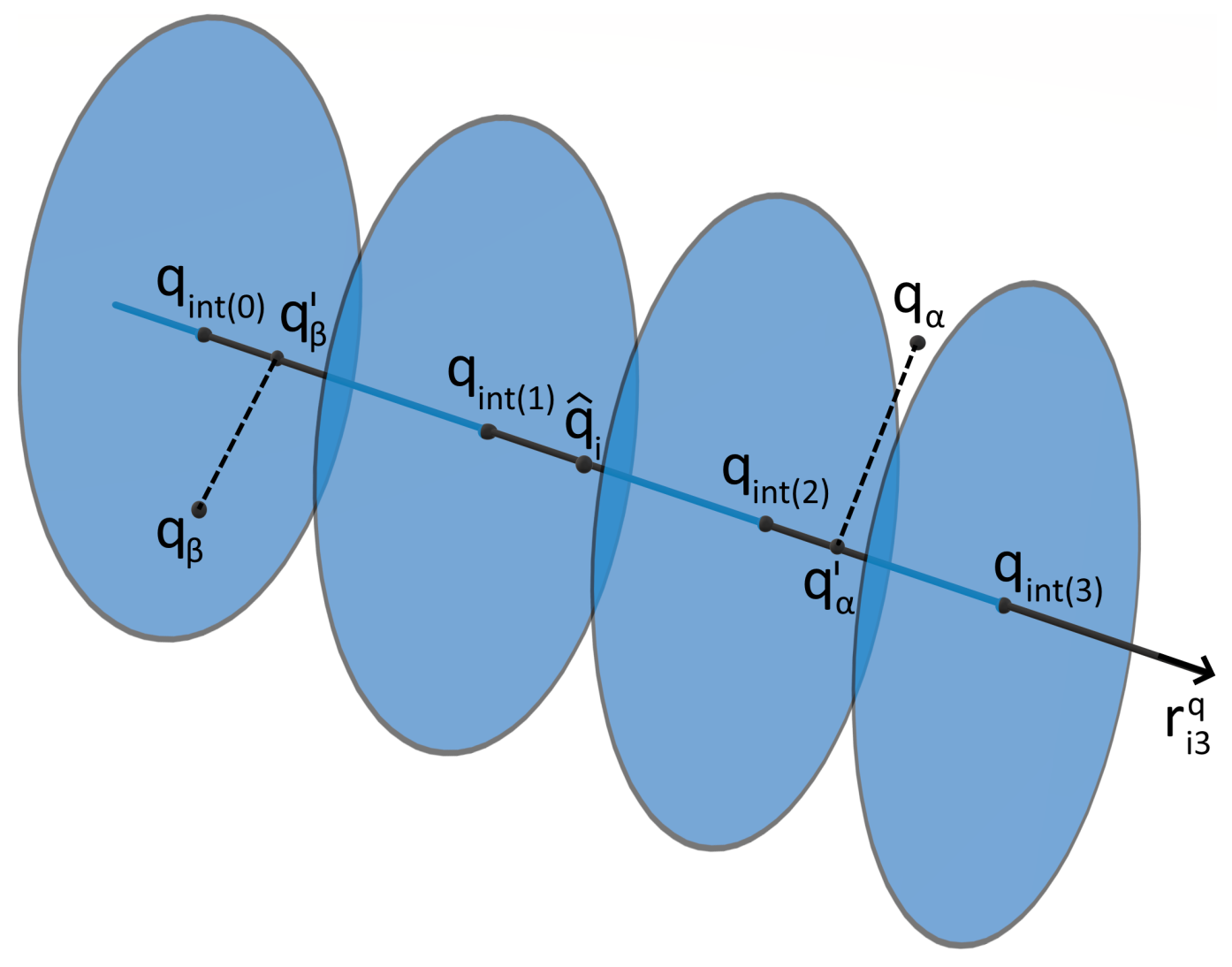
3. Direction Predictor
4. Computer Simulation
4.1. Congruent Case
4.2. Non-Congruent Case
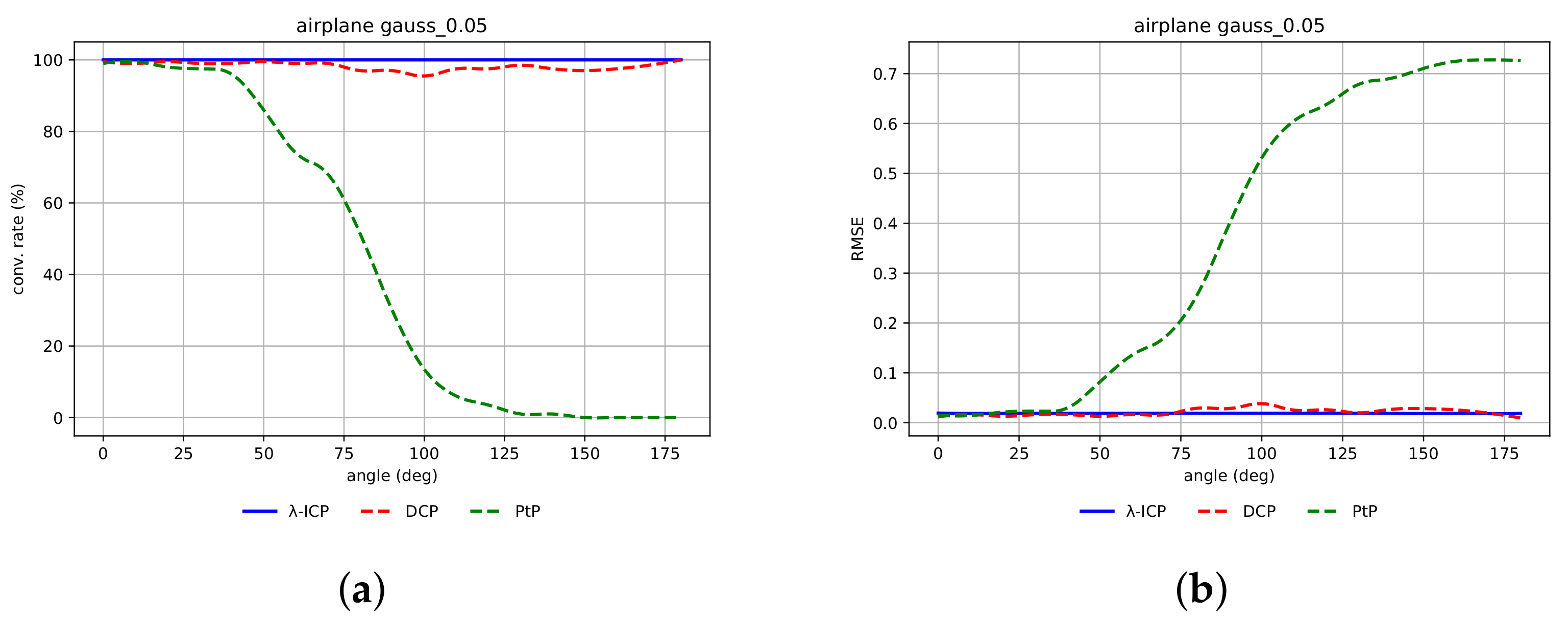
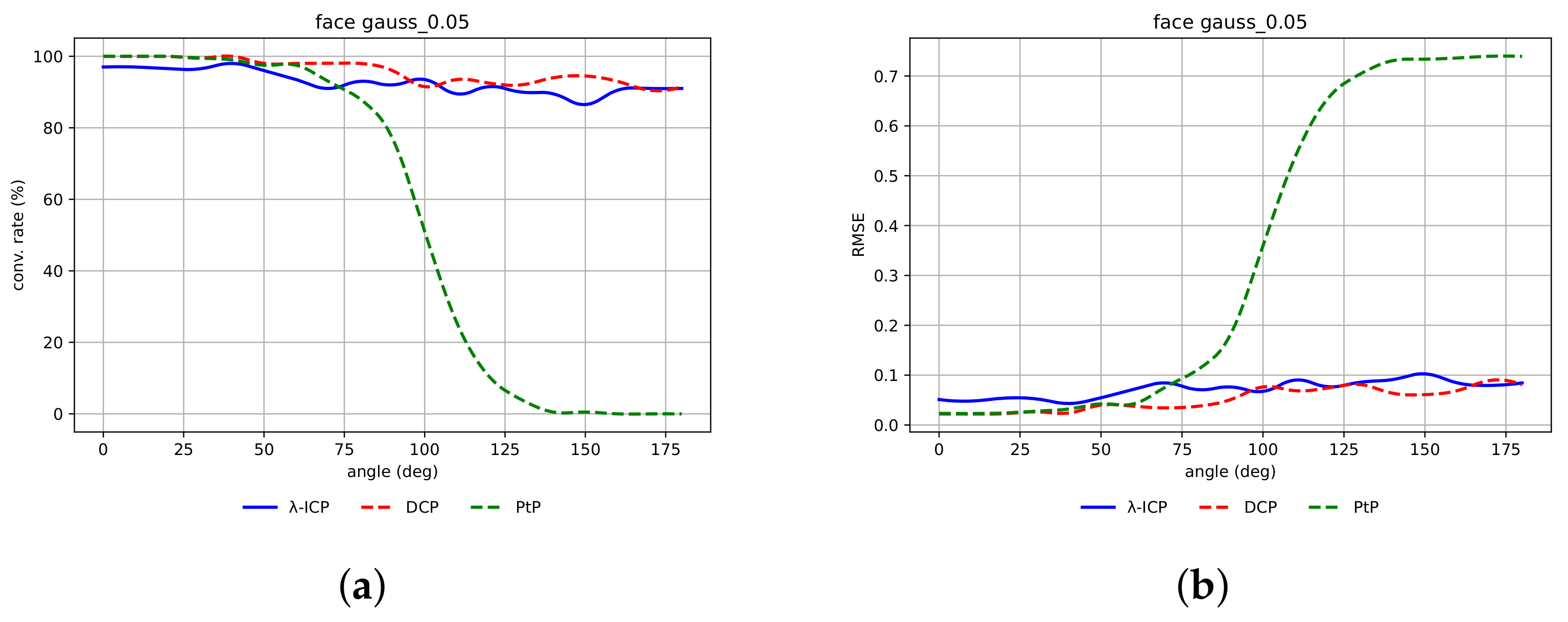
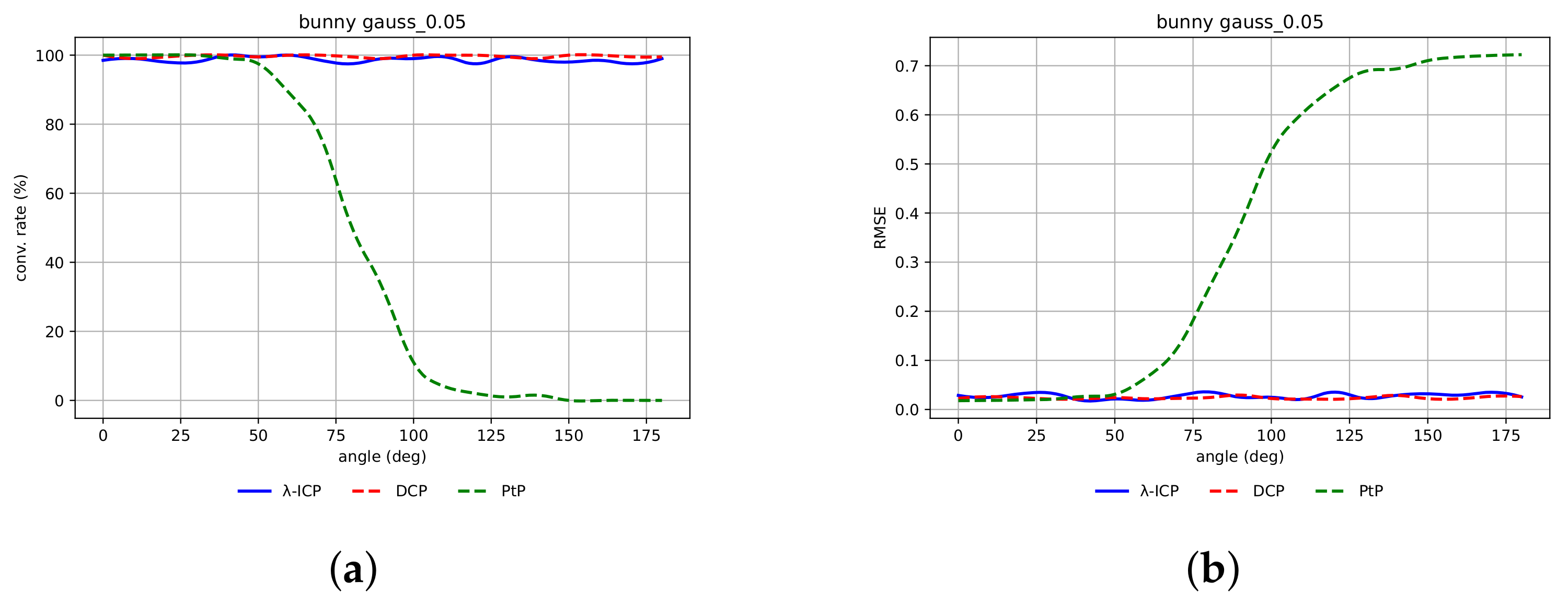
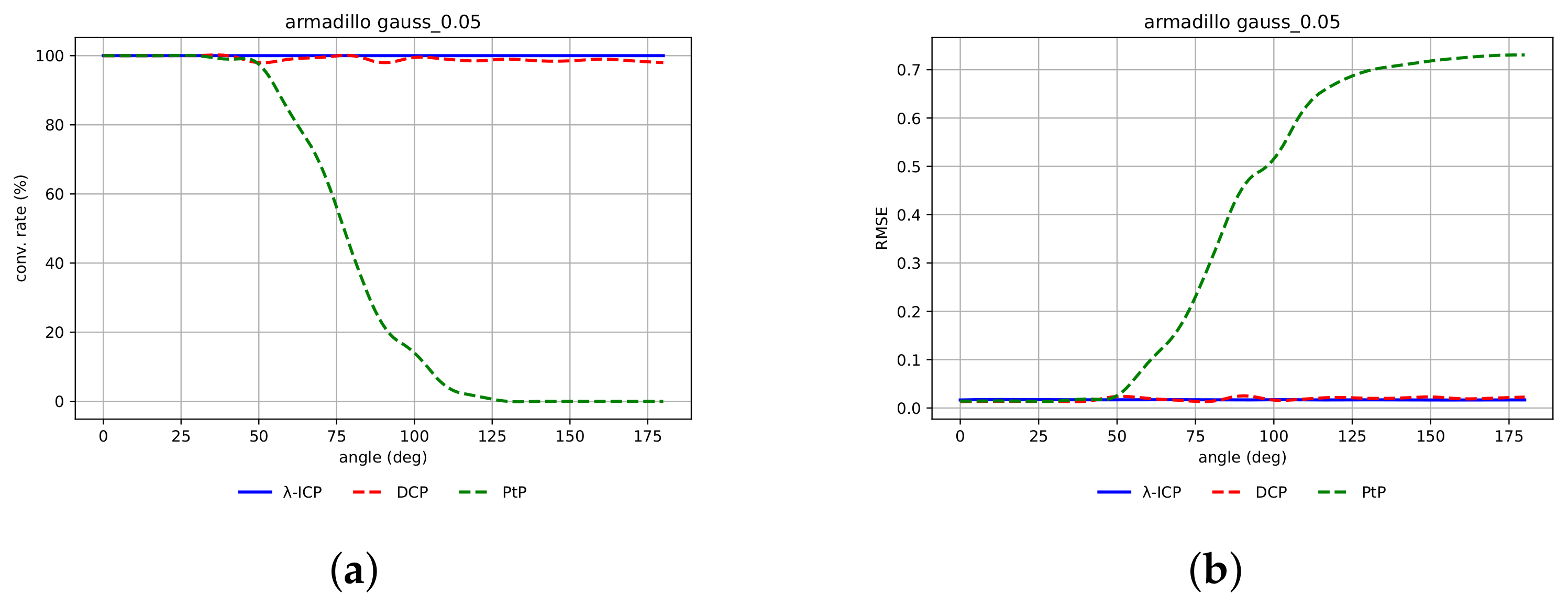
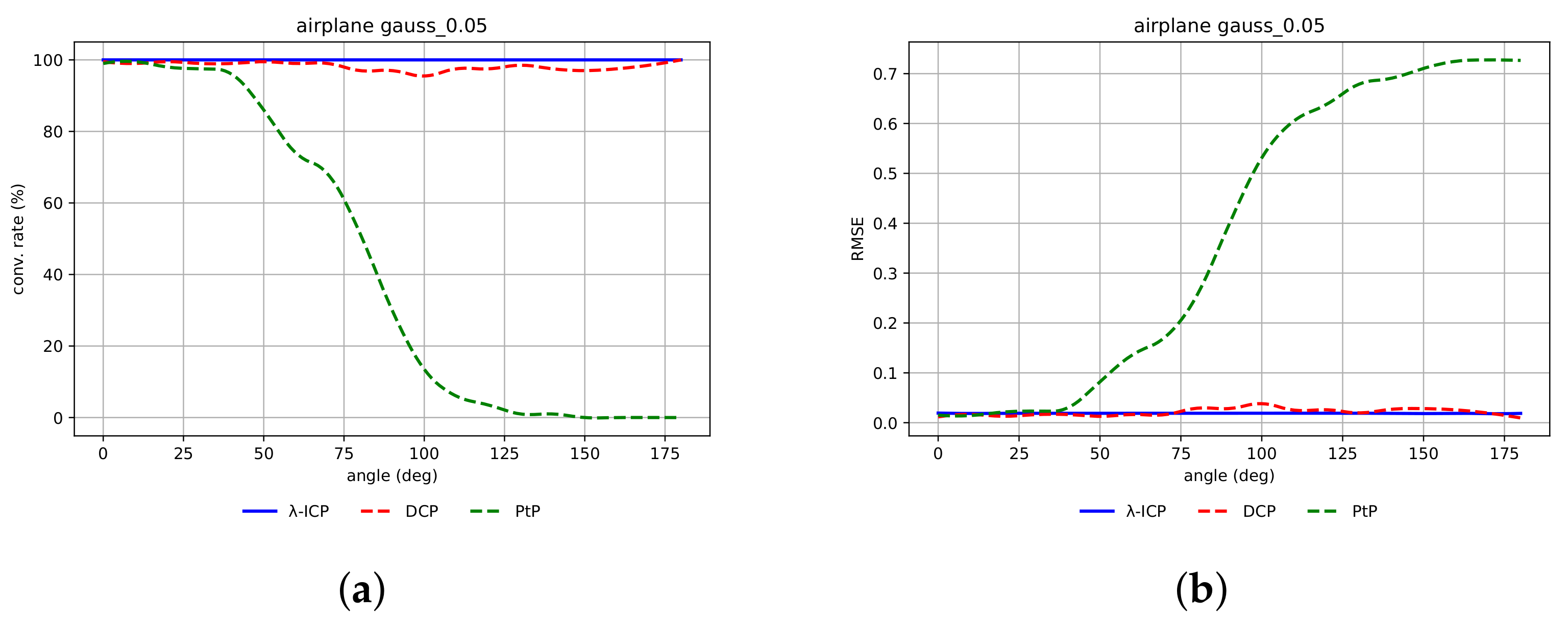
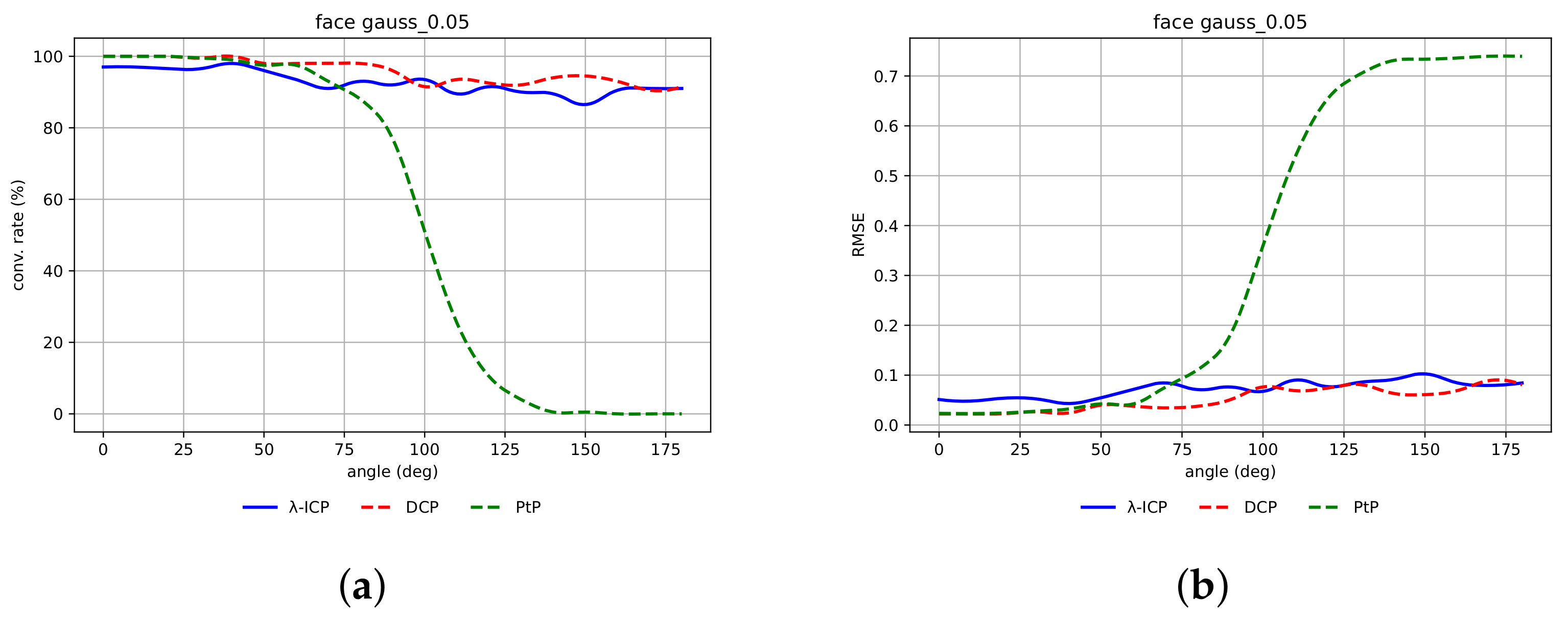
4.2.1. Gaussian Noise with
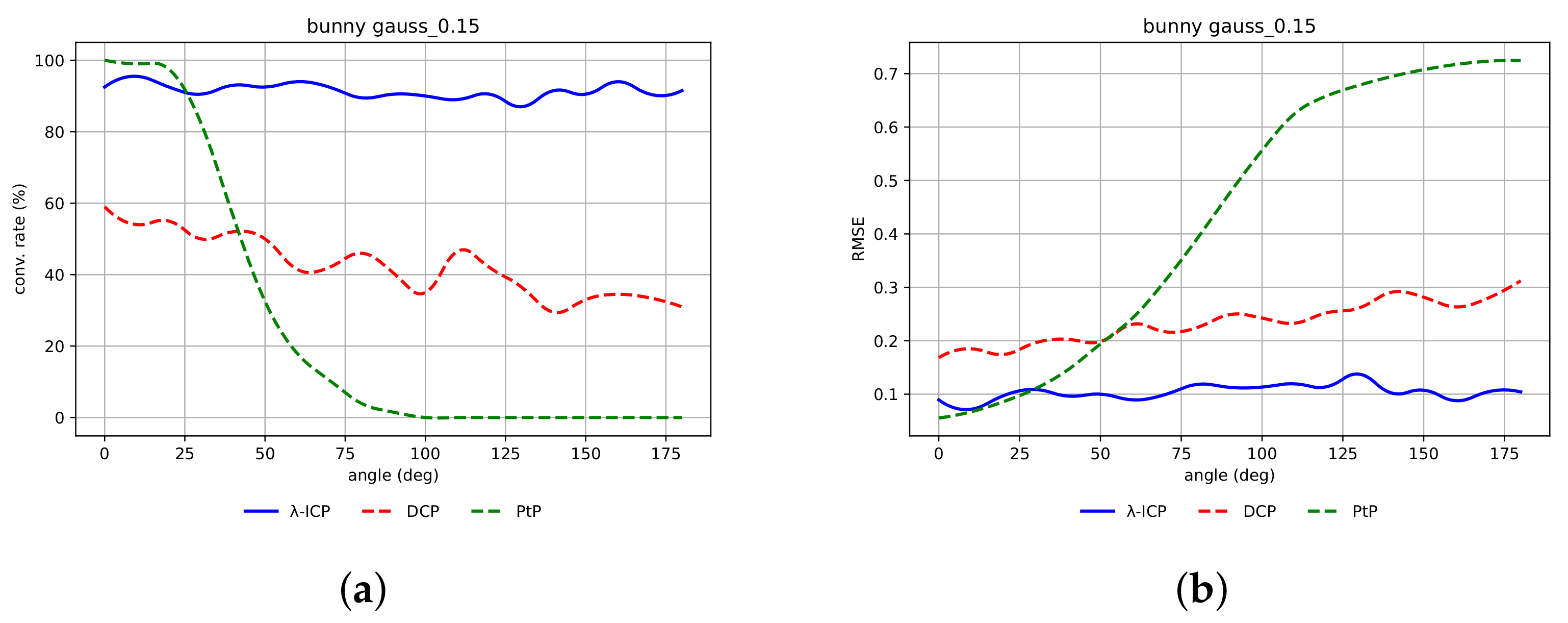
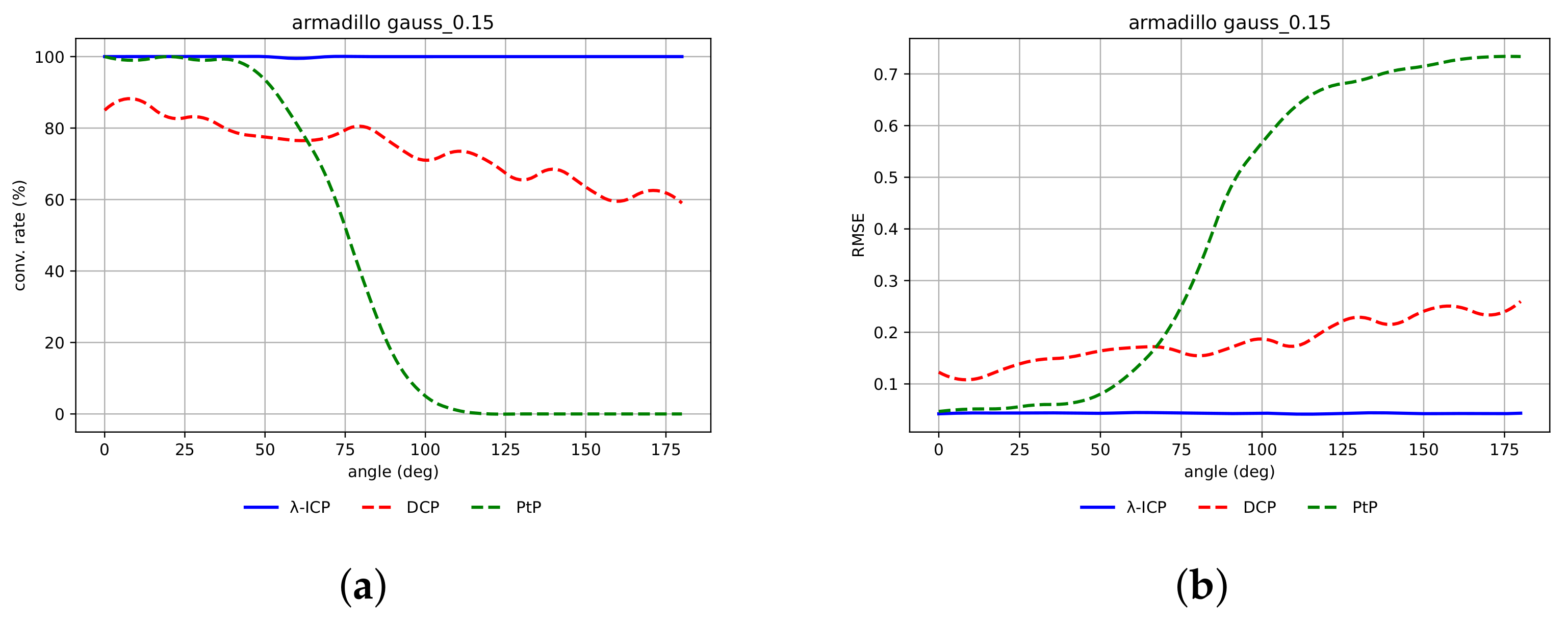
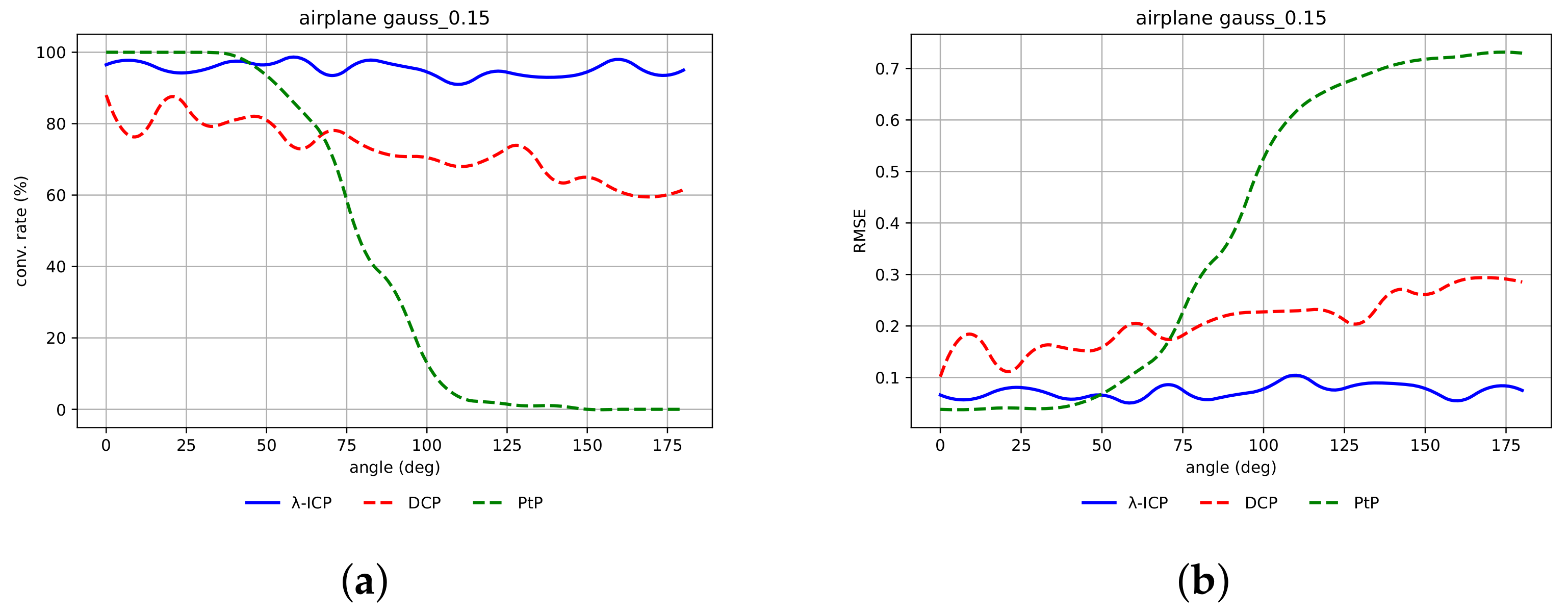
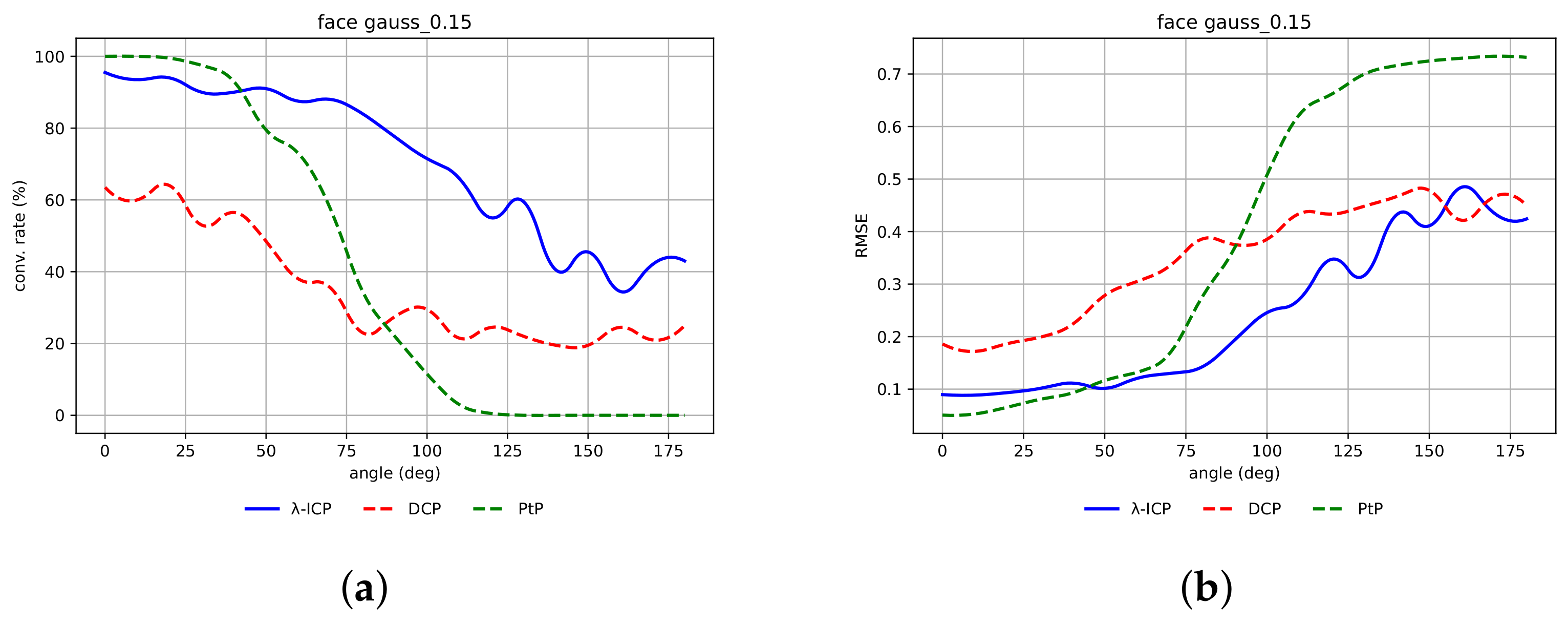
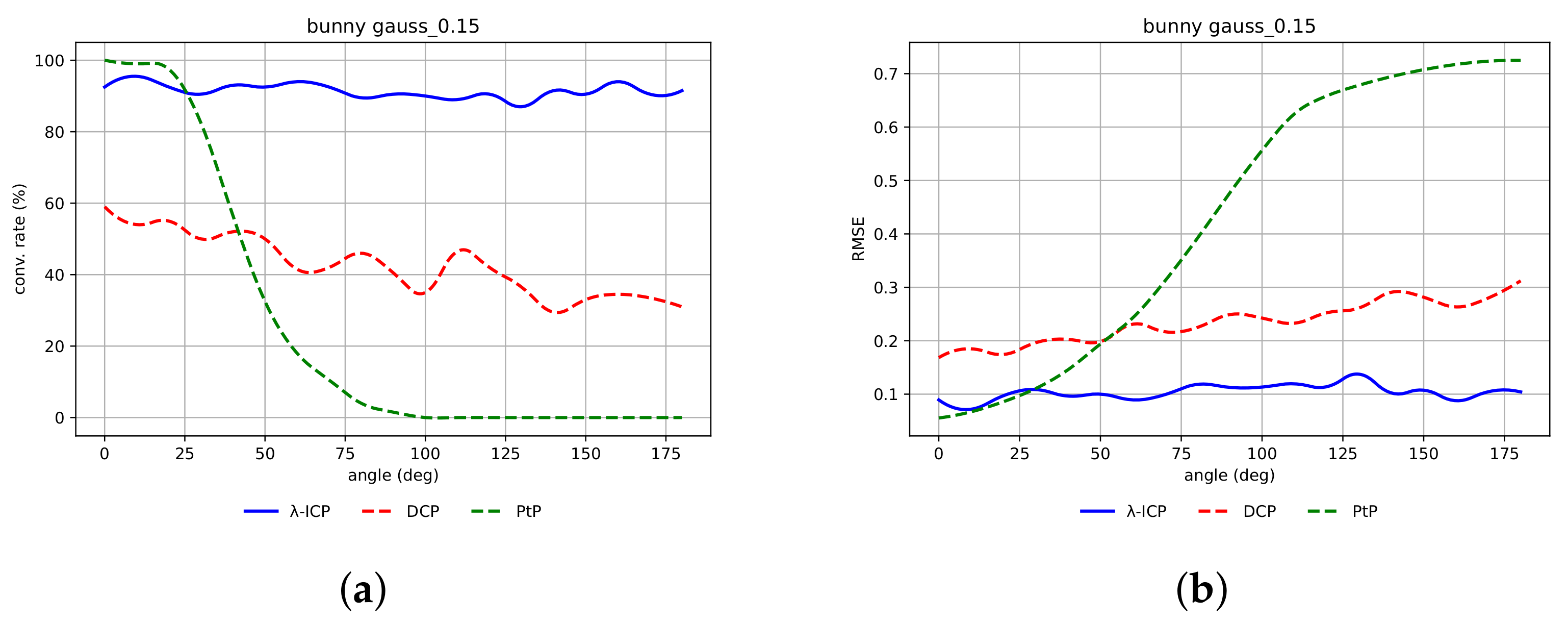
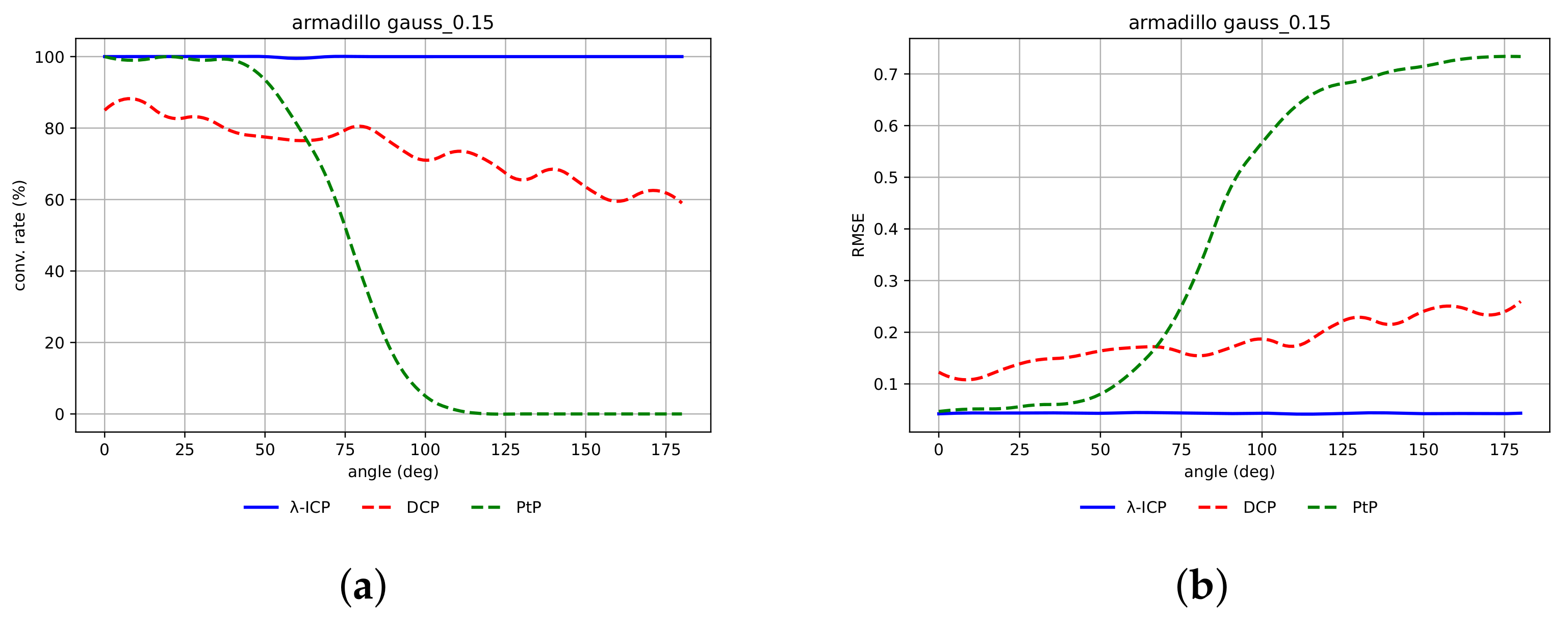
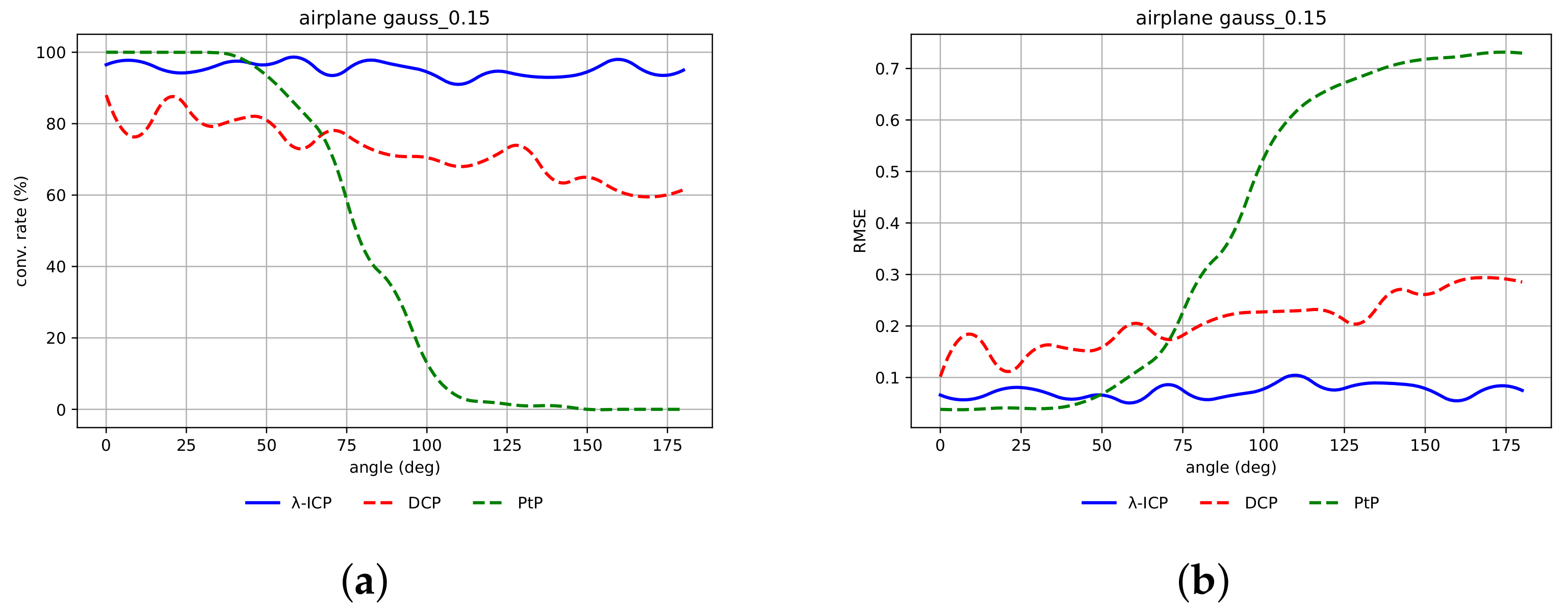
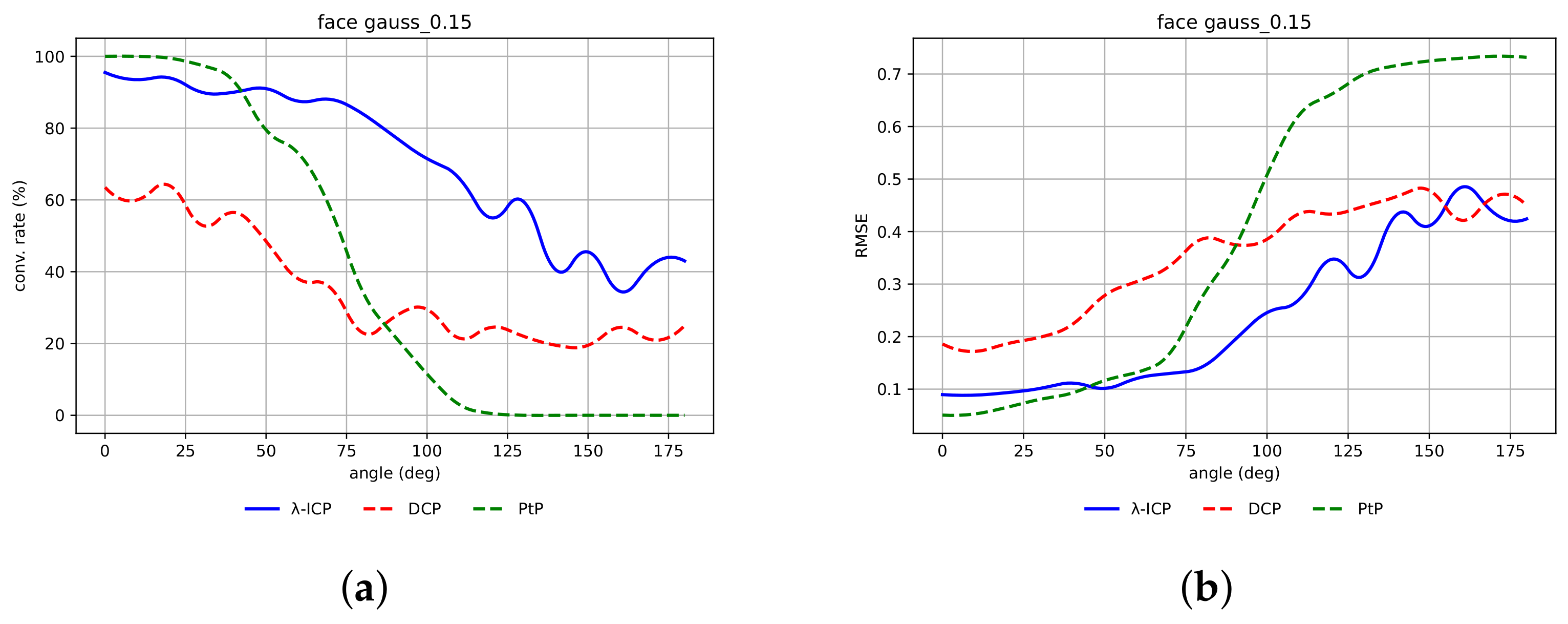
4.2.2. Gaussian Noise with
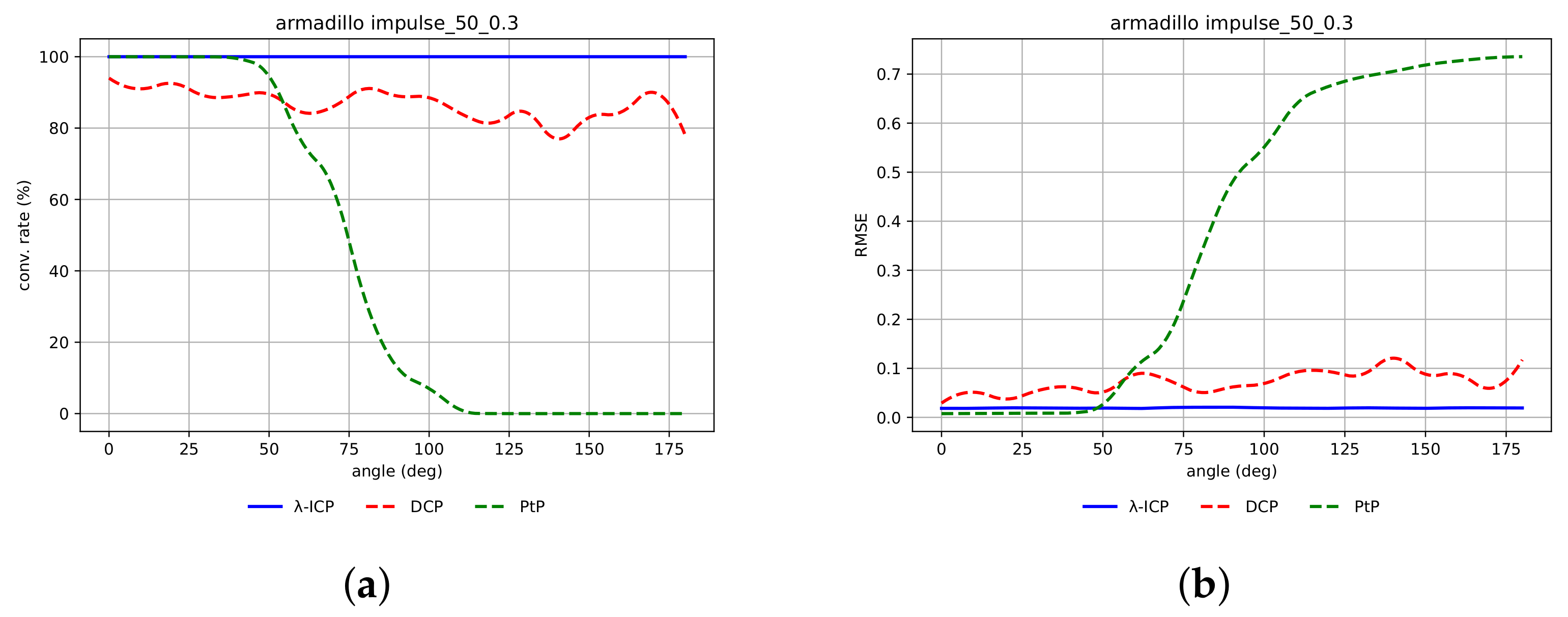
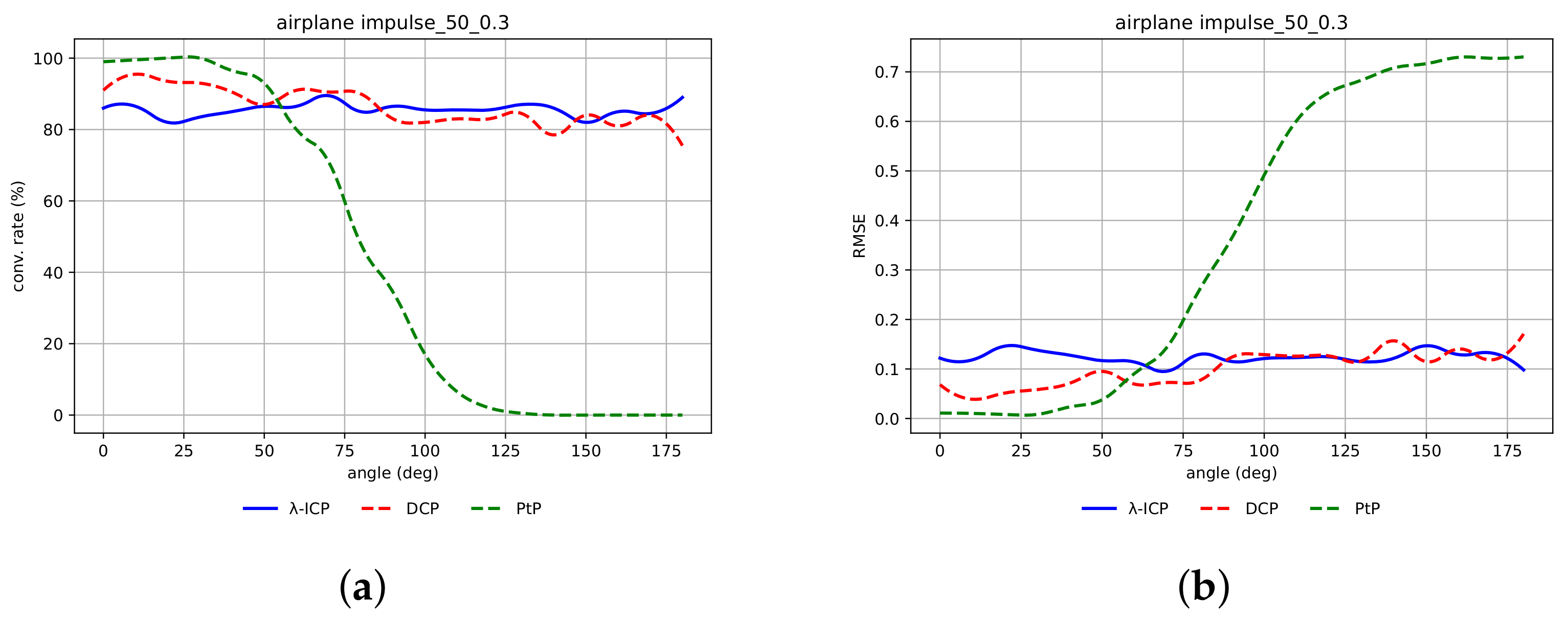
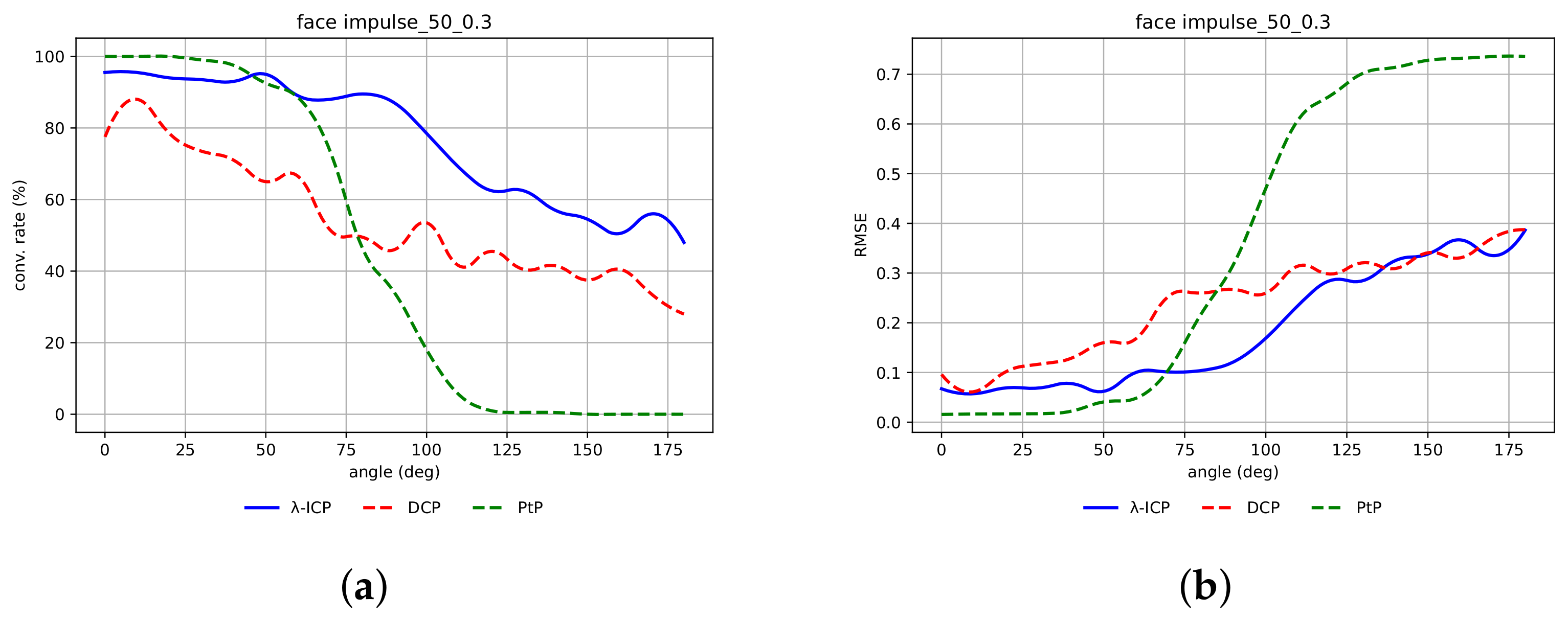
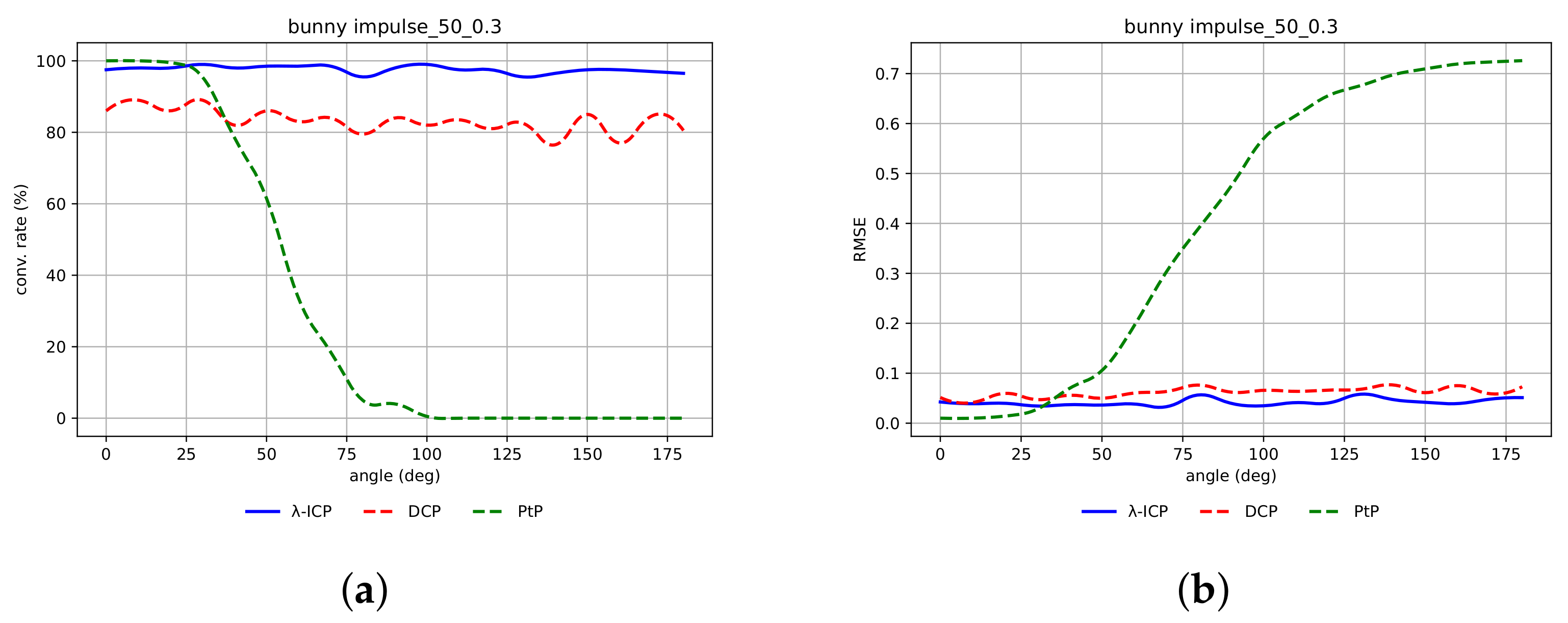
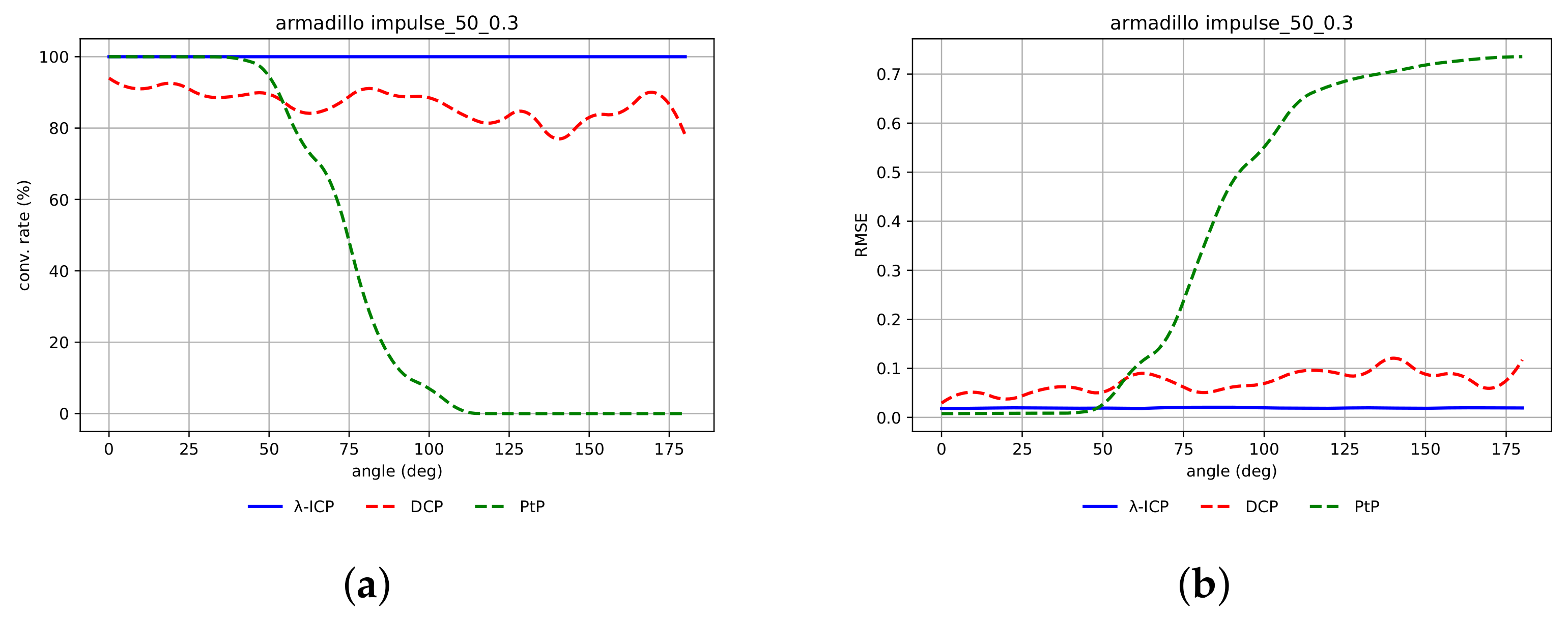
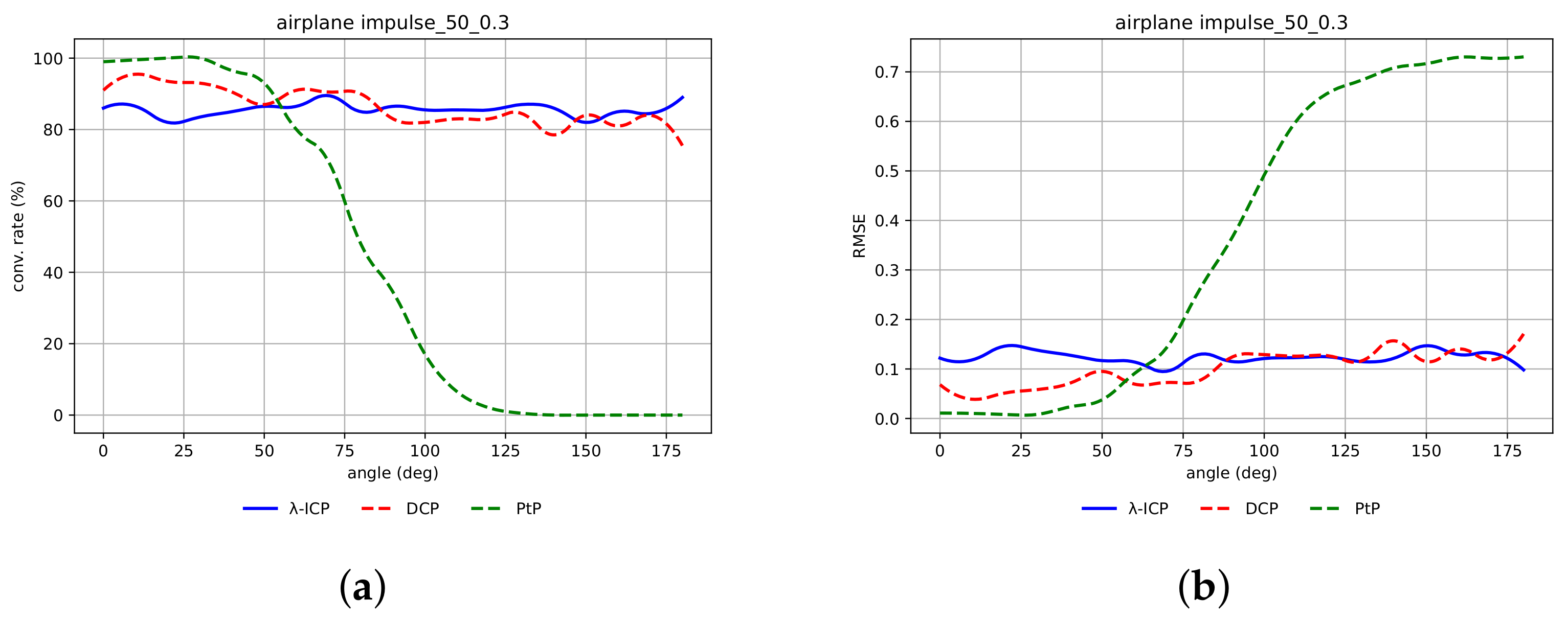
4.2.3. Impulse Noise
4.3. Summarizing the Results for Different Cases
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Besl, P.; McKay, N. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern. Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. Robot. Sci. Syst. 2010, 5, 161–168. [Google Scholar]
- Serafin, J.; Grisetti, G. Using extended measurements and scene merging for efficient and robust point cloud registration. Robot. Auton. Syst. 2017, 92, 91–106. [Google Scholar] [CrossRef]
- Makovetskii, A.; Voronin, S.; Kober, V.; Voronin, A. A regularized point cloud registration approach for orthogonal transformations. J. Glob. Optim. 2020, 1–23. [Google Scholar] [CrossRef]
- Du, S.; Zheng, N.; Meng, G.; Yuan, Z. Affine Registration of Point Sets Using ICP and ICA. IEEE Signal Process. Lett. 2008, 15, 689–692. [Google Scholar]
- Van der Sande, C.; Soudarissanane, S.; Khoshelham, K. Assessment of relative accuracy of AHN-2 laser scanning data using planar features. Sensors 2010, 10, 8198–8214. [Google Scholar] [CrossRef]
- Makovetskii, A.; Voronin, S.; Kober, V.; Tihonkih, D. Affine registration of point clouds based on point-to-plane approach. Procedia Eng. 2017, 201, 322–330. [Google Scholar] [CrossRef]
- Horn, B. Closed-Form Solution of Absolute Orientation Using Unit Quaternions. J. Opt. Soc. Am. A 1987, 4, 629–642. [Google Scholar] [CrossRef]
- Horn, B.; Hilden, H.; Negahdaripour, S. Closed-form Solution of Absolute Orientation Using Orthonormal Matrices. J. Opt. Soc. Am. Ser. A 1988, 5, 1127–1135. [Google Scholar] [CrossRef] [Green Version]
- Umeyama, S. Least-squares estimation of transformation parameters between two point patterns. IEEE-TPAMI 1991, 13, 376–380. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Tang, J.; Su, B.; Su, Q.; Zhou, Z. Point Cloud Registration Algorithm Based on the Grey Wolf Optimizer. IEEE Access. 2020, 8, 143375–143382. [Google Scholar] [CrossRef]
- Voronin, S.; Makovetskii, A.; Kober, V.; Voronin, A. The ICP algorithm based on stochastic approach. Proc. SPIE Appl. Digit. Image Process. XLIV 2021, 11842, 118421P. [Google Scholar]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef] [Green Version]
- Newcombe, R.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.; Kohli, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. KinectFusion: Realtime dense surface mapping and tracking. In Proceedings of the International Symposium on Mixed and Augmented Reality (ISMAR), Basel, Switzerland, 26–29 October 2011. [Google Scholar]
- Shimada, S.; Golyanik, V.; Tretschk, E.; Stricker, D.; Theobalt, C. Dispvoxnets: Non-rigid point set alignment with supervised learning proxies. In Proceedings of the International Conference on 3D Vision (3DV), Quebec City, QC, Canada, 16–19 September 2019. [Google Scholar]
- Gojcic, Z.; Zhou, C.; Wegner, J.; Wieser, A. The perfect match: 3d point cloud matching with smoothed densities. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 5545–5554. [Google Scholar]
- Donati, N.; Sharma, A.; Ovsjanikov, M. Deep geometric functional maps: Robust feature learning for shape correspondence. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 16–18 June 2020. [Google Scholar]
- Groß, J.; Ošep, A.; Leibe, B. Alignnet-3d: Fast point cloud registration of partially observed objects. In Proceedings of the International Conference on 3D Vision(3DV), Quebec City, QC, Canada, 16–19 September 2019; pp. 623–632. [Google Scholar]
- Lu, W.; Wan, G.; Zhou, Y.; Fu, X.; Yuan, P.; Song, S. Deepvcp: An end-to-end deep neural network for point cloud registration. In Proceedings of the ComputerVision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 12–21. [Google Scholar]
- Wang, Y.; Solomon, J. Deep Closest Point: Learning Representations for Point Cloud Registration. arXiv 2019, arXiv:1905.03304. [Google Scholar]
- Wu, Z.; Song, S.; Khosla, A.; Yu, F.; Zhang, L.; Tang, X.; Xiao, J. 3D Shapenets: A Deep Representation for Volumetric Shapes. CVPR 2015, 1912–1920. [Google Scholar]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep learning on point sets for 3d classification an segmentation. In Proceedings of the CVPR, IEEE Computer Society, Boston, MA, USA, 7–12 June 2017; pp. 77–85. [Google Scholar]
- Makovetski, A.; Voronin, S.; Kober, V.; Voronin, A. A non-iterative method for approximation of the exact solution to the point-to-plane variational problem for orthogonal transformation. Math. Methods Appl. Sci. 2018, 41, 9218–9230. [Google Scholar] [CrossRef]
- Bro, R.; Acar, E.; Kolda, T. Resolving the sign ambiguity in the singular value decomposition. J. Chemometr. 2008, 22, 135–140. [Google Scholar] [CrossRef] [Green Version]
- Salti, S.; Tombari, F.; Di Stefano, L. SHOT: Unique signatures of histograms for surface and texture description. Comput. Vis. Image Underst. 2014, 125, 251–264. [Google Scholar] [CrossRef]
- Deep Closest Point. Available online: https://github.com/WangYueFt/dcp (accessed on 15 October 2021).
- Bosphorus 3d Face Database. Available online: http://bosphorus.ee.boun.edu.tr/default.aspx (accessed on 15 October 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Subsegments | Neighborhood Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Stanford Bunny | 3 | 400 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Armadillo | 3 | 400 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Airplane | 4 | 1000 | 2 | 10 | 5 | 1 | 1 | 1 | 1 |
| Face | 3 | 1400 | 20 | 1 | 20 | 1 | 1 | 1 | 1 |
| Number of Subsegments | Neighborhood Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Stanford Bunny | 3 | 800 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Armadillo | 3 | 800 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Airplane | 4 | 1000 | 2 | 10 | 5 | 1 | 1 | 1 | 1 |
| Face | 3 | 1400 | 20 | 1 | 20 | 1 | 1 | 1 | 1 |
| Number of Subsegments | Neighborhood Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Stanford Bunny | 3 | 800 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Armadillo | 3 | 800 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Airplane | 4 | 1000 | 2 | 10 | 5 | 1 | 1 | 1 | 1 |
| Face | 3 | 800 | 20 | 1 | 20 | 1 | 1 | 1 | 1 |
| Number of Subsegments | Neighborhood Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Stanford Bunny | 3 | 800 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Armadillo | 3 | 800 | 2 | 2 | 2 | 1 | 1 | 1 | 1 |
| Airplane | 4 | 1000 | 2 | 10 | 5 | 1 | 1 | 1 | 1 |
| Face | 3 | 800 | 20 | 1 | 20 | 1 | 1 | 1 | 1 |
| Noise Free | Impulse Noise | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DCP | PtP | DCP | PtP | DCP | PtP | DCP | PtP | |||||
| Bunny | 99.9 | 100 | 50.9 | 98.7 | 99.7 | 45.5 | 91.5 | 42.7 | 26.4 | 98 | 83.2 | 31.4 |
| Armadillo | 100 | 100 | 43.4 | 100 | 99.1 | 43.8 | 100 | 73.6 | 42 | 100 | 86.7 | 41.4 |
| Airplane | 100 | 100 | 38.8 | 100 | 98.3 | 43.4 | 95.3 | 72.8 | 44.6 | 85.6 | 86.3 | 44.6 |
| Face | 100 | 100 | 55.5 | 92.8 | 95.8 | 54.9 | 71 | 35.6 | 40.6 | 76.8 | 54.2 | 45.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Makovetskii, A.; Voronin, S.; Kober, V.; Voronin, A. Point Cloud Registration Based on Multiparameter Functional. Mathematics 2021, 9, 2589. https://doi.org/10.3390/math9202589
Makovetskii A, Voronin S, Kober V, Voronin A. Point Cloud Registration Based on Multiparameter Functional. Mathematics. 2021; 9(20):2589. https://doi.org/10.3390/math9202589
Chicago/Turabian StyleMakovetskii, Artyom, Sergei Voronin, Vitaly Kober, and Aleksei Voronin. 2021. "Point Cloud Registration Based on Multiparameter Functional" Mathematics 9, no. 20: 2589. https://doi.org/10.3390/math9202589
APA StyleMakovetskii, A., Voronin, S., Kober, V., & Voronin, A. (2021). Point Cloud Registration Based on Multiparameter Functional. Mathematics, 9(20), 2589. https://doi.org/10.3390/math9202589