6.1. Definition and Properties of the Event Chains for 2SBRSBF
In the simulational solution, we generate a large count
N of pseudo-realities in which we observe the behavior of the 2SBRSBF system from time 0 to system failure or to time
tend whichever comes first. As in the numerical solution (described in
Section 5) the constant
tend is selected sufficiently large, so
. The pseudo-realities are described with the ECs introduced in [
22] where the EC of the
jth pseudo-reality is defined as the set:
The notation in Equation (23) shows that the jth pseudo-reality contains qj state transitions (called events) where the kth consecutive event which happened at time timepsrj(k) is a transition to state/substate timepsrj(k). The latter is coded either with 1, 2, and 3 respectively for State 1, State 2, and State 3, or with 40, 41, 42, and 43 respectively for system failure type b, type a, type c, and type d (all of them denoting State 4). Any EC for a 2SBRSBF system should have the following properties:
p1) It contains at least one event: qj ≥ 1.
p2) The events happen at strictly increasing times: timepsrj(k)< timepsrj(k + 1) for k = 1,2,…,(qj − 1).
p3) The initial event is at time zero: timepsrj(1) = 0.
p4) The final event happens before tend: timepsrj(qj) < tend.
p5) The simulation starts with fully operational system: statepsrj(1) = 1.
p6) Whenever a system failure is observed the simulation ends: if statepsrj(b) > 3, then qj = b.
p7) Whenever the State 3 is observed either it is the last event, or the next event is the system failure type d: if statepsrj(b) = 3, then either qj = b, or qj = (b + 1) and statepsrj(qj) = 43.
p8) The State 3 and the State 4 (in all its substates) can happen only once: #[statepsrj(k) = 3] ≤ 1, #[statepsrj(k) = 40] ≤ 1, #[statepsrj(k) = 41] ≤ 1, #[statepsrj(k) = 42] ≤ 1, #[statepsrj(k) = 43] ≤ 1.
p9) The State 1 and State 2 alternate in the beginning of the EC including to the hth event and neither one happens later: statepsrj(k) = 1 if and only if k is odd and k ≤ h, whereas statepsrj(k) = 2 if and only if k is even and k ≤ h.
p10) There could be maximum two events after h: h ≤ qj ≤ (h + 2).
p11) If there are events after the hth one, they are either a transition to State 3 or a transition to State 4 (in all its substates): statepsrj(k) ≥ 3 for all k > h and k ≤ qj.
p12) The State 2 can be observed only on an even position and the previous event is always a transition to State 1: if statepsrj(b) = 2, then b is even and statepsrj(b − 1) = 1.
p13) The State 3 can be observed only on an even position and the previous event is always a transition to State 1: if statepsrj(b) = 3, then b is even and statepsrj(b − 1) = 1.
The formulated EC properties will facilitate the generation of time-period variates presented in
Section 6.2. The algorithm described in
Section 6.3 will generate ECs with the formulated EC properties. The latter will be used in
Section 6.4 to prove the methods for extracting reliability information from the generated set of ECs for 2SBRSBF system.
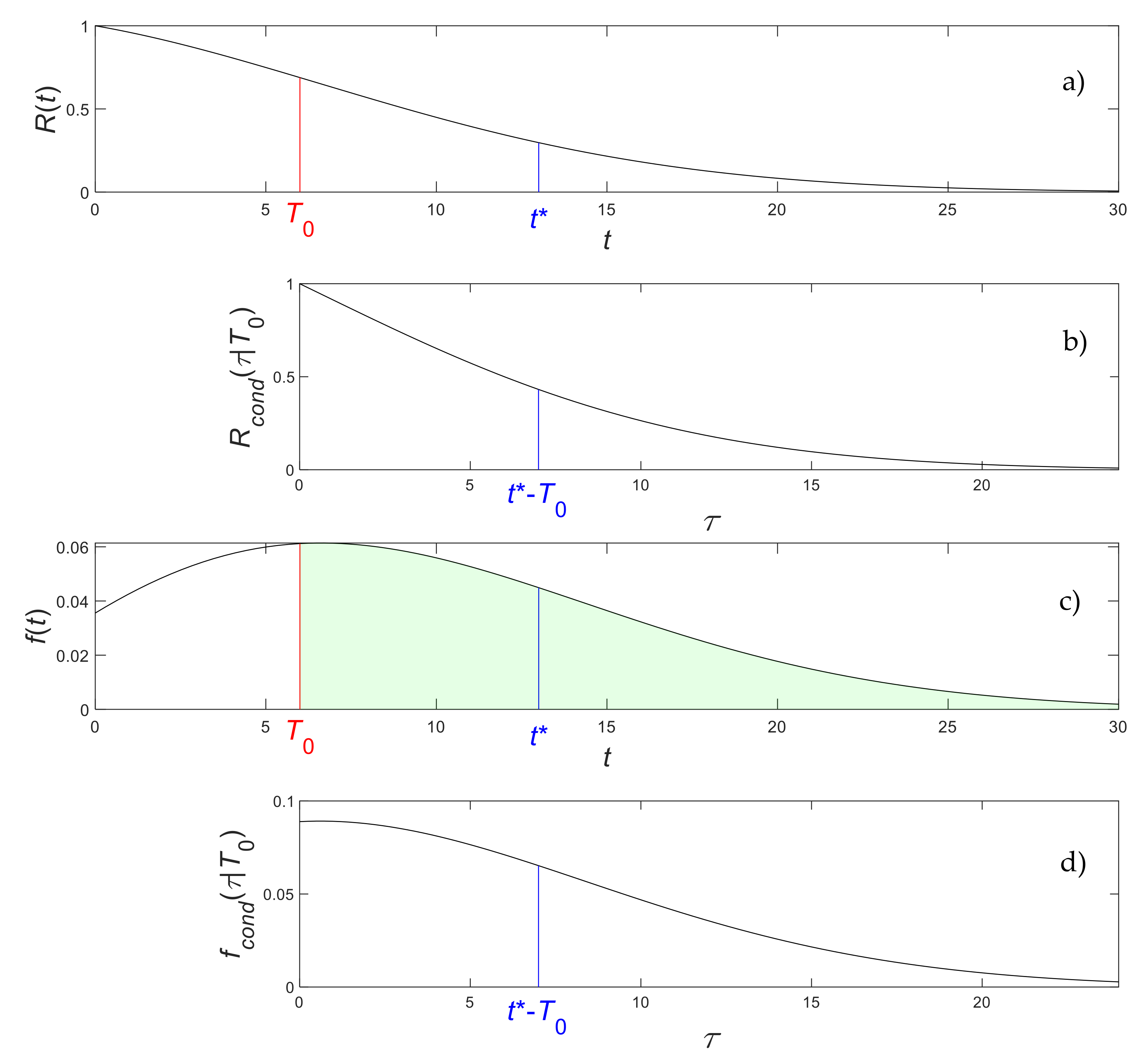
6.2. Generating Times Periods Using Conditional Distributions from 2SBRSBF
As discussed in
Section 3, to simulate an EC of a 2SBRSBF system we need to generate random time-periods complying with the conditional failure distributions
f1(
τ|t),
f3(
τ|t), and
f2(
τ|tage) and with the conditional repair distribution
f4(
τ|t), where
t and
tage are non-negative values.
We do not know which of the four original distributions,
fk(
t) (
k = 1,2,3,4), are defined only in the non-negative domain and which are defined in the entire real axes so we need to substitute them with their truncated distributions,
fk,trunc(
t) =
fk(
t|0) for
k = 1,2,3,4. Noting that if the first condition is met, then
fk,trunc(
t) =
fk(
t|0) =
fk(
t) (
k = 1,2,3,4), and we can safely work only with truncated distributions. So, strictly speaking, we need to generate time-period variates from the conditional truncated distributions
f1,trun(
τ|t),
f3,trun(
τ|t),
f2,trun(
τ|tage), and
f4,trun (
τ|t). However, for any
k it is true that:
According to Equation (24) the conditional truncated distributions coincide with the conditional original distributions. In case
t and
tage are known entities we can generate random time-period variates as special cases of the Practical Indirect Sampling Method from Conditional CDF (PISMCF) [
17] where the algorithm is motivated, formalized, illustrated, and proven. On its basis we can define a three-attribute procedure, PISMCF(.), which generates numerically stable random time interval variate,
, from a given conditional CDF,
F(
t|
Tsurv), where
Tsurv is a non-negative real number representing the time of survival:
In Equation (25),
F(.) is the unconditional CDF which can express
F(
t|
Tsurv) using Equation (26):
The second argument,
F–1(.), of the PISMCF procedure from Equation (25) being the inverse CDF, can be used to estimate the time
tλ where the denominator of Equation (26) is 100 machine epsilons (
ϵ):
In short, the algorithm for estimating Equation (25) is: (a) Calculate tλ using Equation (27); (b) if Tsurv < tλ, then set Tcut = Tsurv, else set Tcut = tλ; (c) Generate RD as a uniformly distributed variate in the unit interval (0,1); (d) estimate pRD = 1 − RD [1 − F(Tcut)]; (e) Set .
Let us assume that while performing the simulation of the
jth pseudo-reality for the 2SBRSBF system we have observed only the first
kcur state events. The simulation probably will continue and therefore, the EC is yet incomplete:
Then, the current state of the system is scur = statesprj(kcur) and the simulational time is Tcur = timesprj(kcur) < tend (see EC property p3). The incomplete EC in Equation (28) is never empty since kcur ≥ 1 (see EC properties p1, p3, and p5).
If scur > 3, we do not need to generate any time-period variates since it shows a system failure, i.e., end of the simulation in the jth pseudo-reality (see EC properties p8, p11, and p6).
If
scur is 1, we need to generate two possible time-period variates: the time to failure of the primary unit,
, and the time to failure in standby of the backup unit,
. Using Equation (25):
If scur is 3, we do not need to generate any time-period variate since the possible time to failure of the primary unit is known to be , where are generated in the previous State 1 (see EC properties p9 and p13).
If scur > 3, we do not need to generate any time-period variate since we have observed a system failure of some type which means that the simulation in the jth pseudo-reality should stop and therefore qj = kcur (see EC properties p6, p8, and p11).
If
scur is 2, we need to generate two possible time-period variates: the time to repair of the primary unit,
, and the time to failure in operation of the backup unit,
. Using Equation (25):
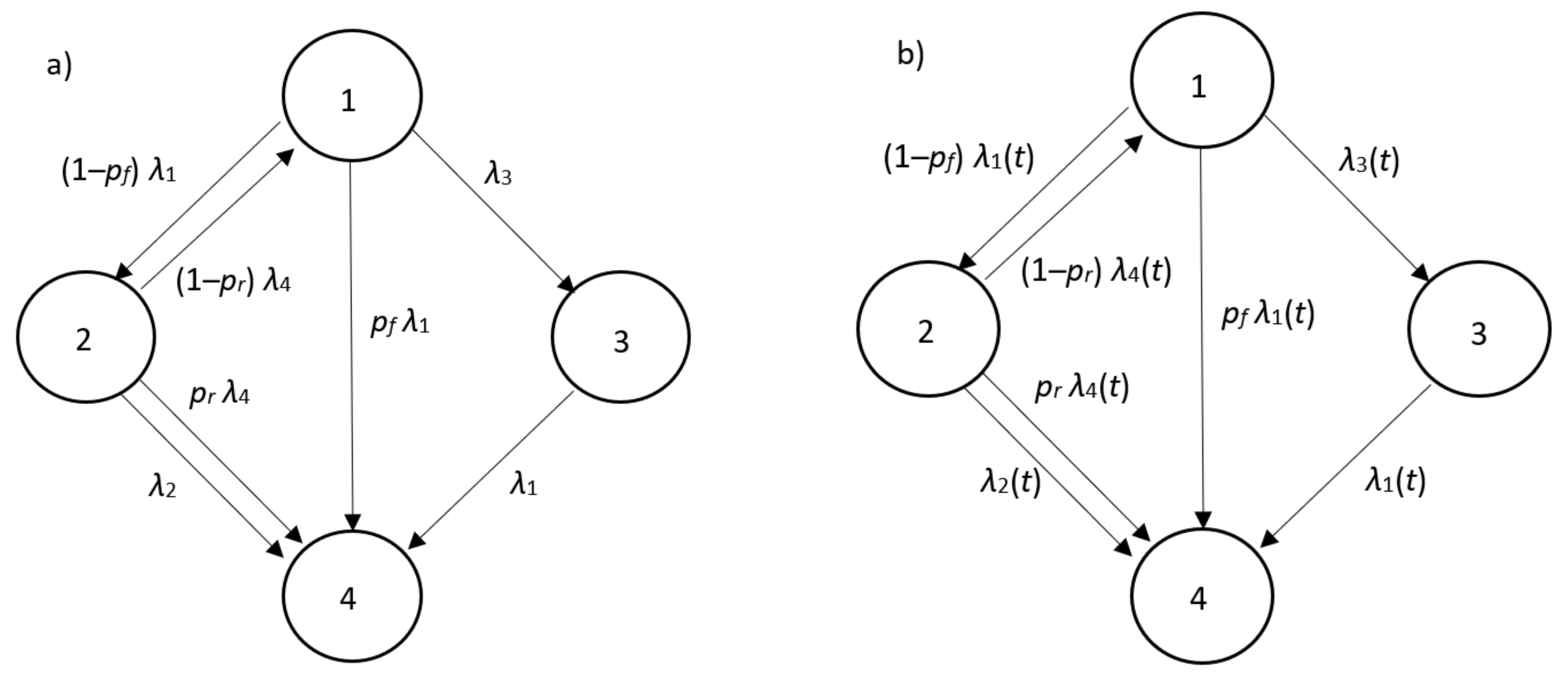
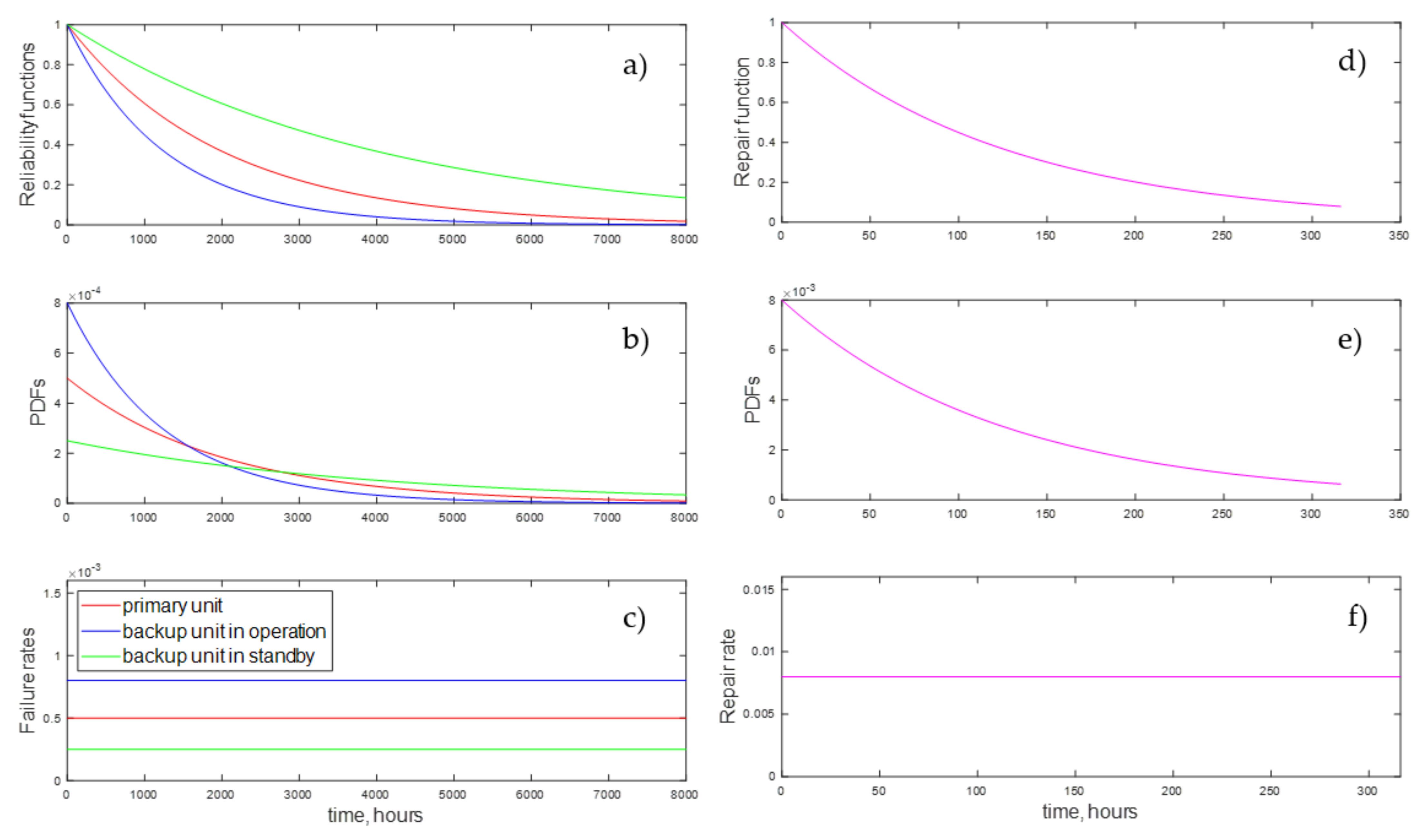
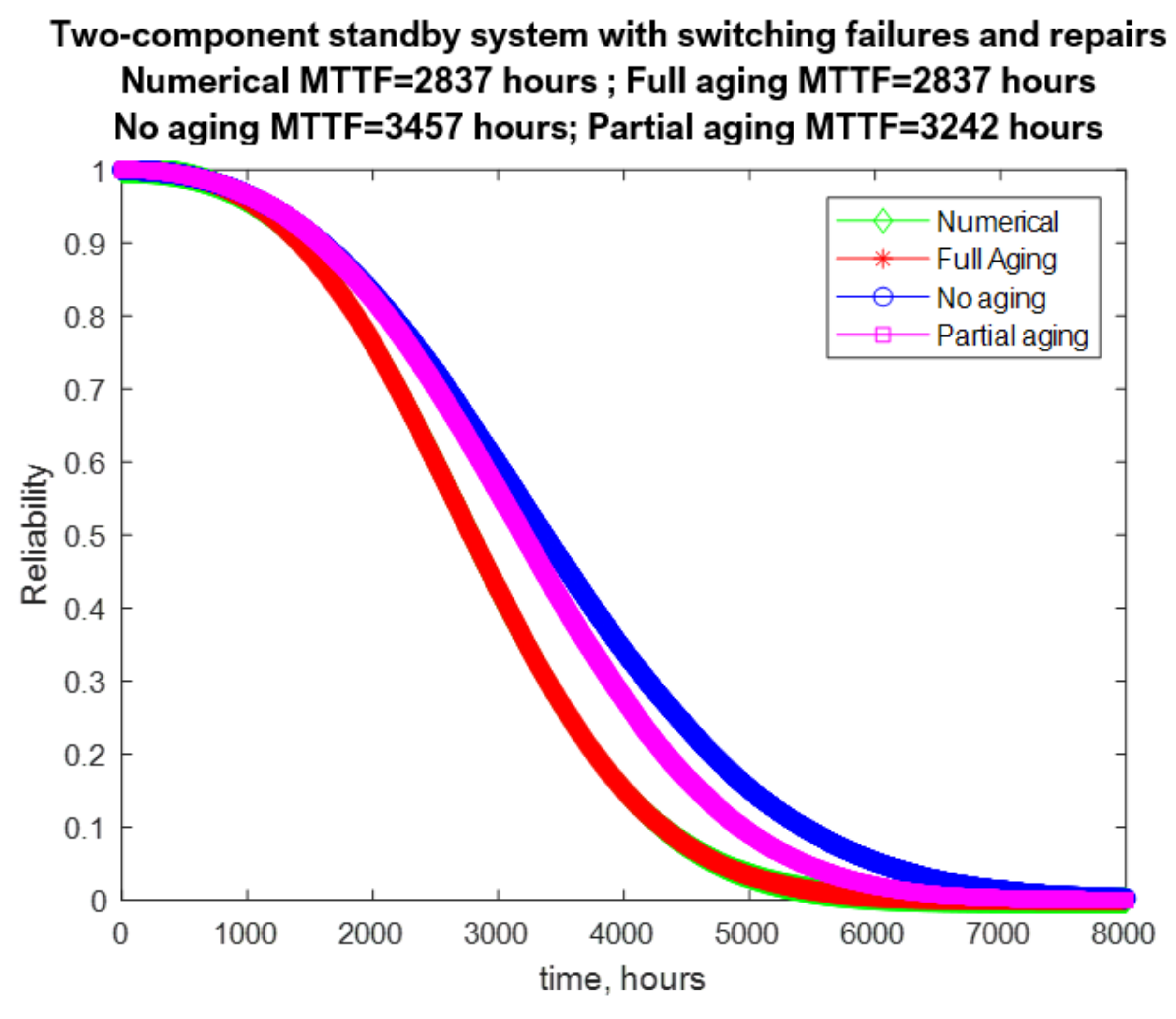
If the 2SBRSBF operates with First Case distributions, the equivalent age,
tage, of the backup unit when it starts operation at time
Tcur is rather irrelevant since
F2(.) is the CDF of an exponential distribution. Then we can compare the state probability functions derived by the simulational solution with the same acquired, on one hand, from numerical solution with the DAE system from Equation (16) according to the RD in
Figure 1b and on the other hand with the analytical solution from Equations (9)–(12) according to the RD in
Figure 1a.
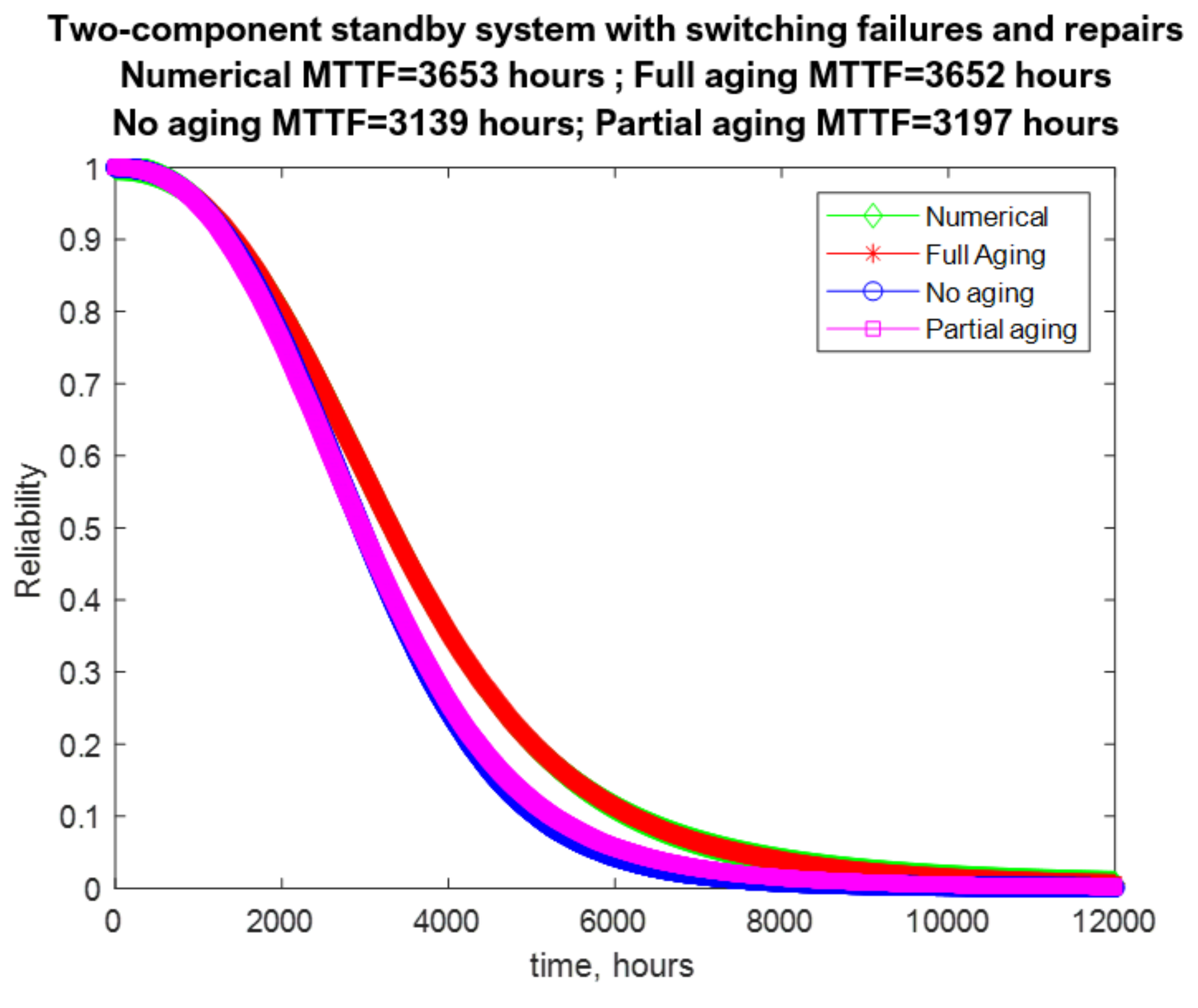
If, however, the 2SBRSBF operates with Second Case distributions, then in order to use Equation (32), we have to determine the equivalent age,
tage, at time
Tcur. Since we need
only when the system is State 2, it follows that
kcur is even (see EC property p9). From the beginning of the
jth pseudo-reality up to time
Tcur, the backup component has been in standby (
kcur/2) times when the primary component was operating till its failure (see EC property p9). Up to
Tcur, the backup component has never failed in standby when the primary component was in operation, i.e., during the compound time interval with overall positive length
Tsb (see EC properties p6, p8, and p9). The latter time length can be defined using Equation (28) as:
On the other hand, the backup component has been in operation (
kcur/2 − 1) times, when the primary component was in successful repair (see EC property p9). Up to
Tcur, the backup component has never failed during operation when the primary component was successfully repaired, i.e., during the compound time interval with overall non-negative length
Toper time (see EC properties p7, p8, and p9). The latter time length can be estimated by noting that up to
Tcur the 2SBRSBF system is either in State 1 or in State 2:
The non-negative value of
tage will be the sum of the backup component operation time,
Toper, with the equivalent operating time
with which the backup component would age during the standby time
Tsb:
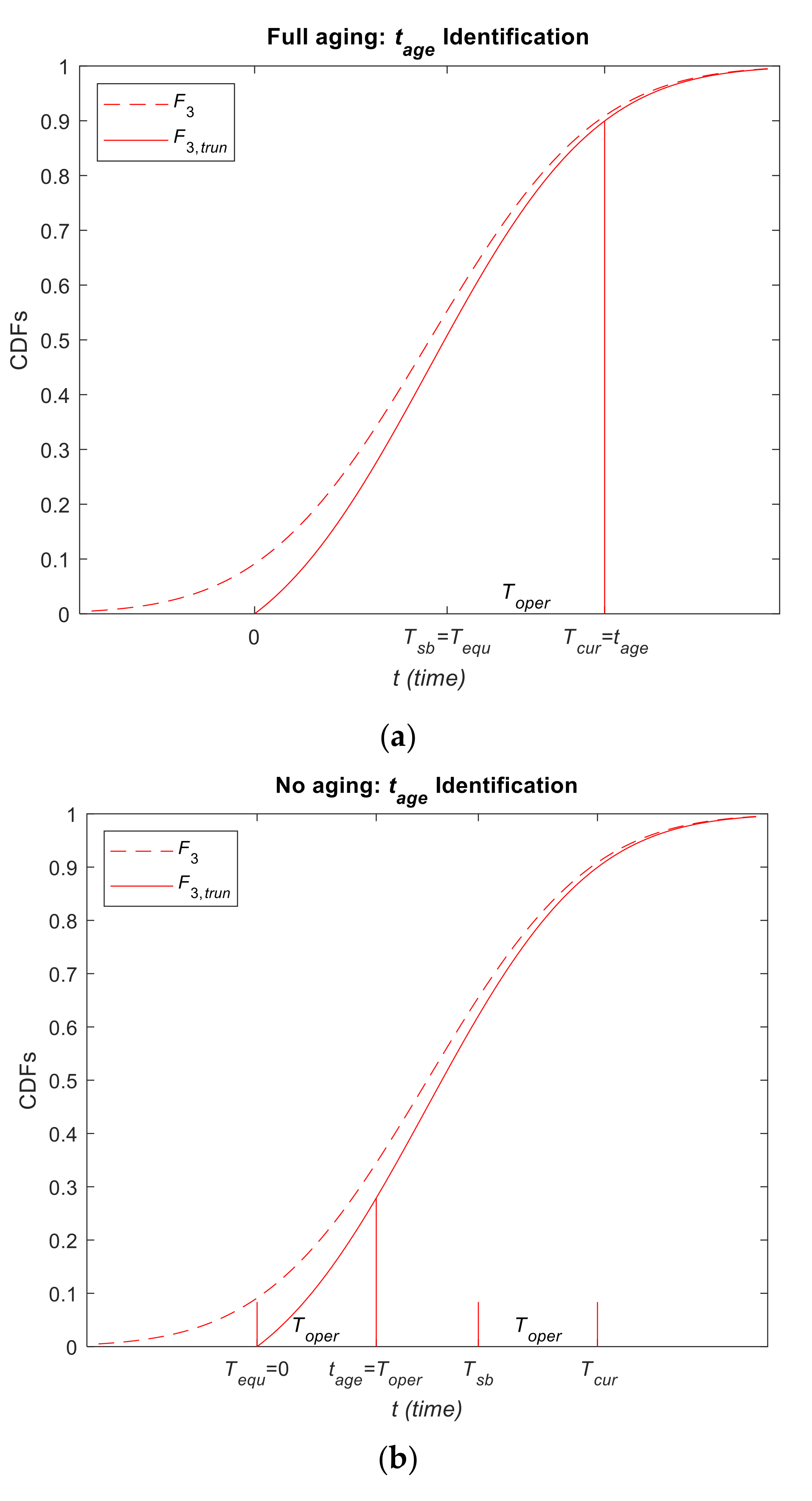
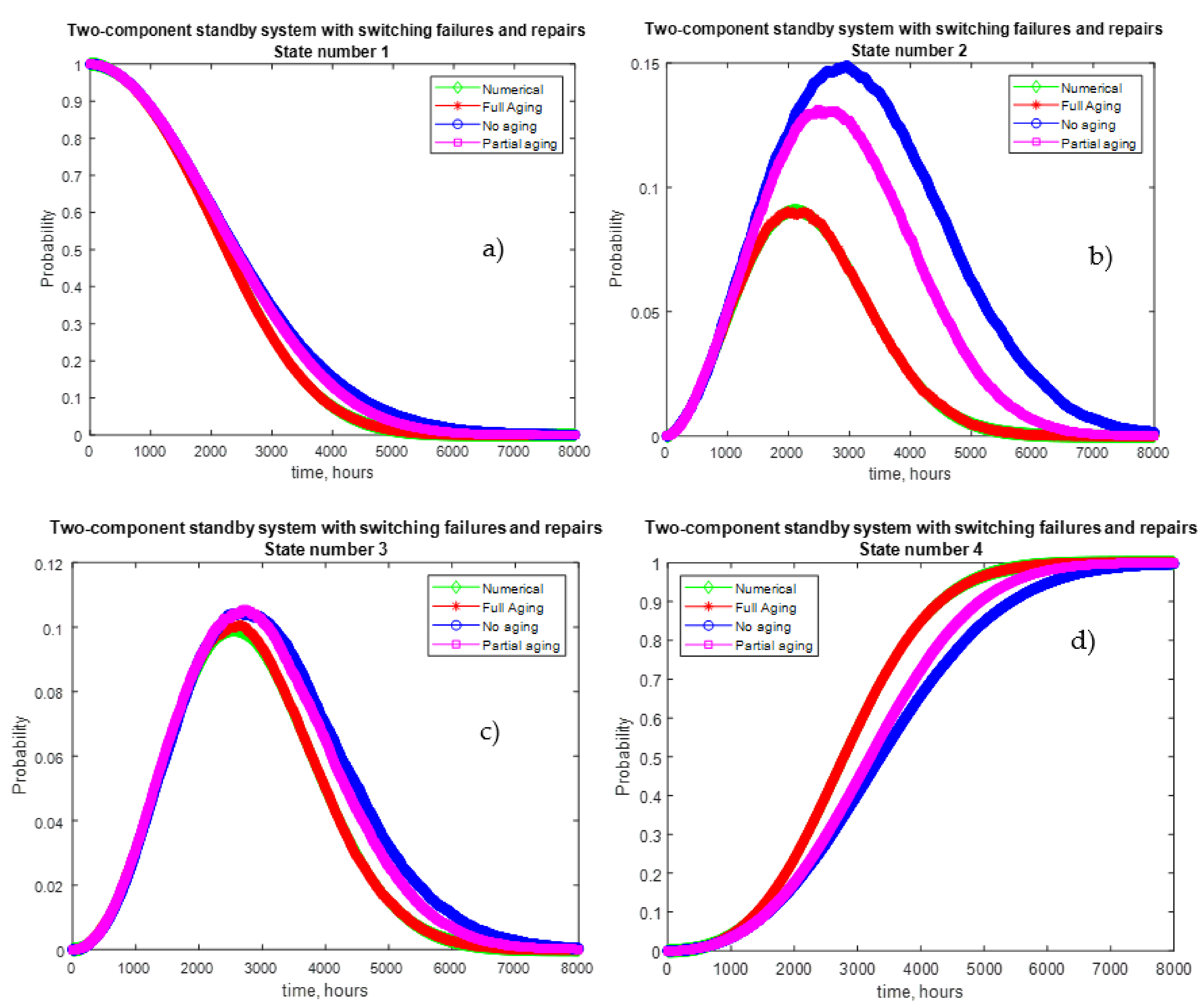
The equivalent operating time depends on aging in standby mechanism under which the 2SBRSBF system functions. There are three alternative assumptions for the nature of this aging in standby mechanism: full aging, no aging, or partial aging.
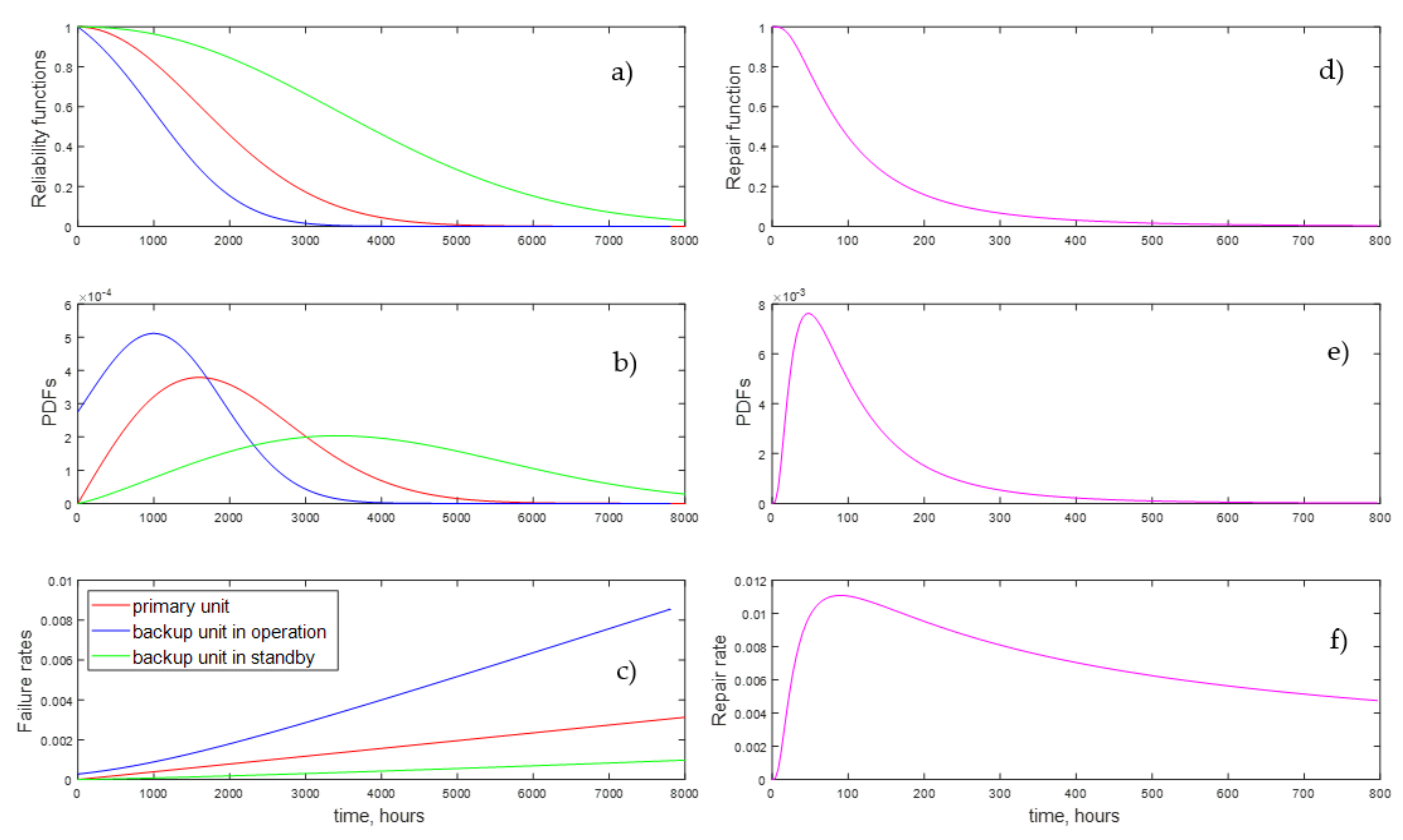
The full aging assumption accepts that the aging of the backup component during standby is the same as during operation (see
Figure 2a):
Under the full aging assumption, a 2SBRSBF can be described with the DAE system from Equation (16) according to the RD in
Figure 1b, which allows us to acquire numerical solution for Second Case distributions. The numerical solution can be compared with simulational state probability functions.
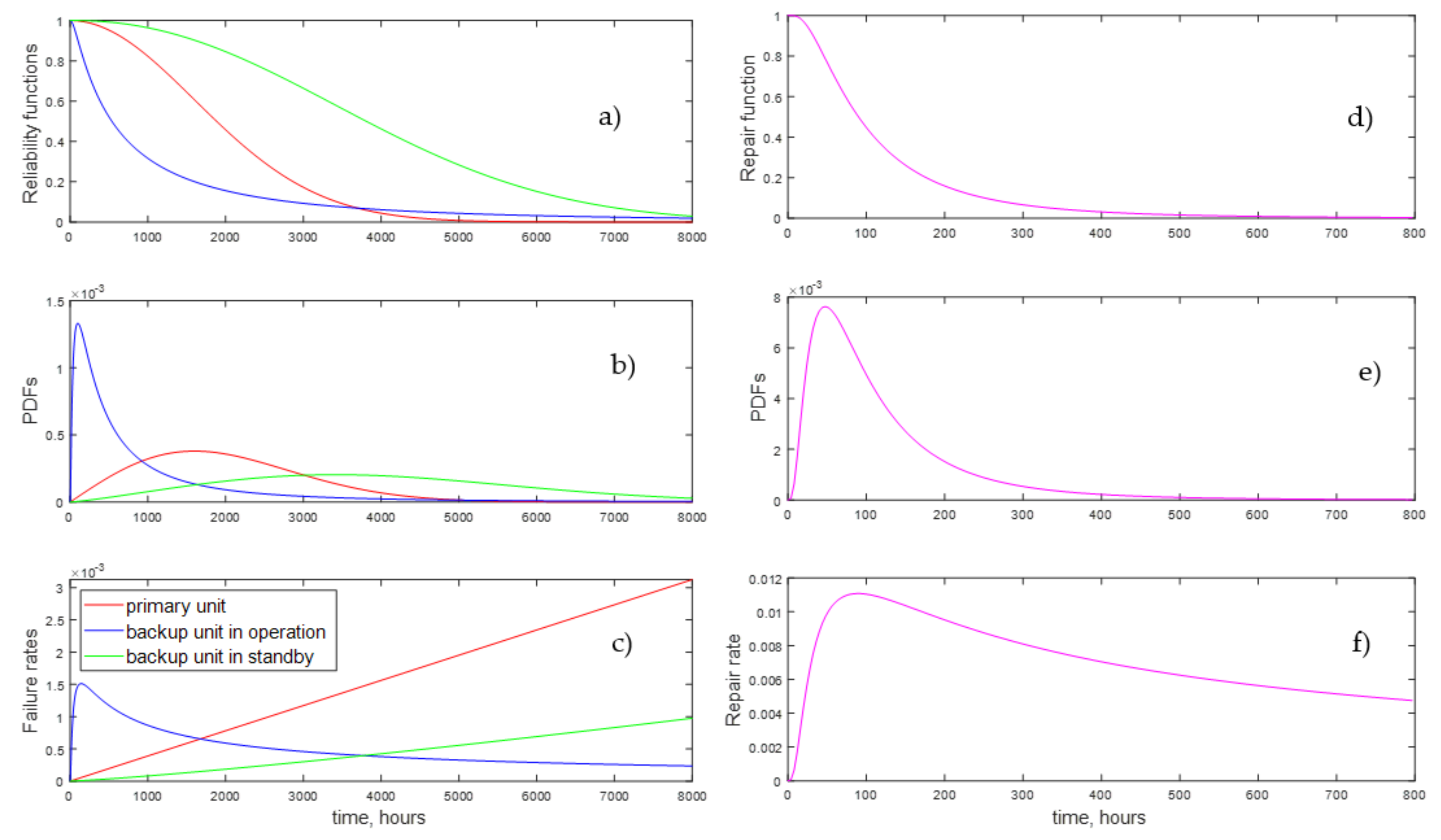
The no aging assumption accepts that the backup component during standby never ages (see
Figure 2b):
Under the no aging assumption, a 2SBRSBF cannot be described with a DAE system since no RD adequately reflects the reliability behavior of the 2SBRSBF. For Second Case distributions, the only possible solution is the simulational one.
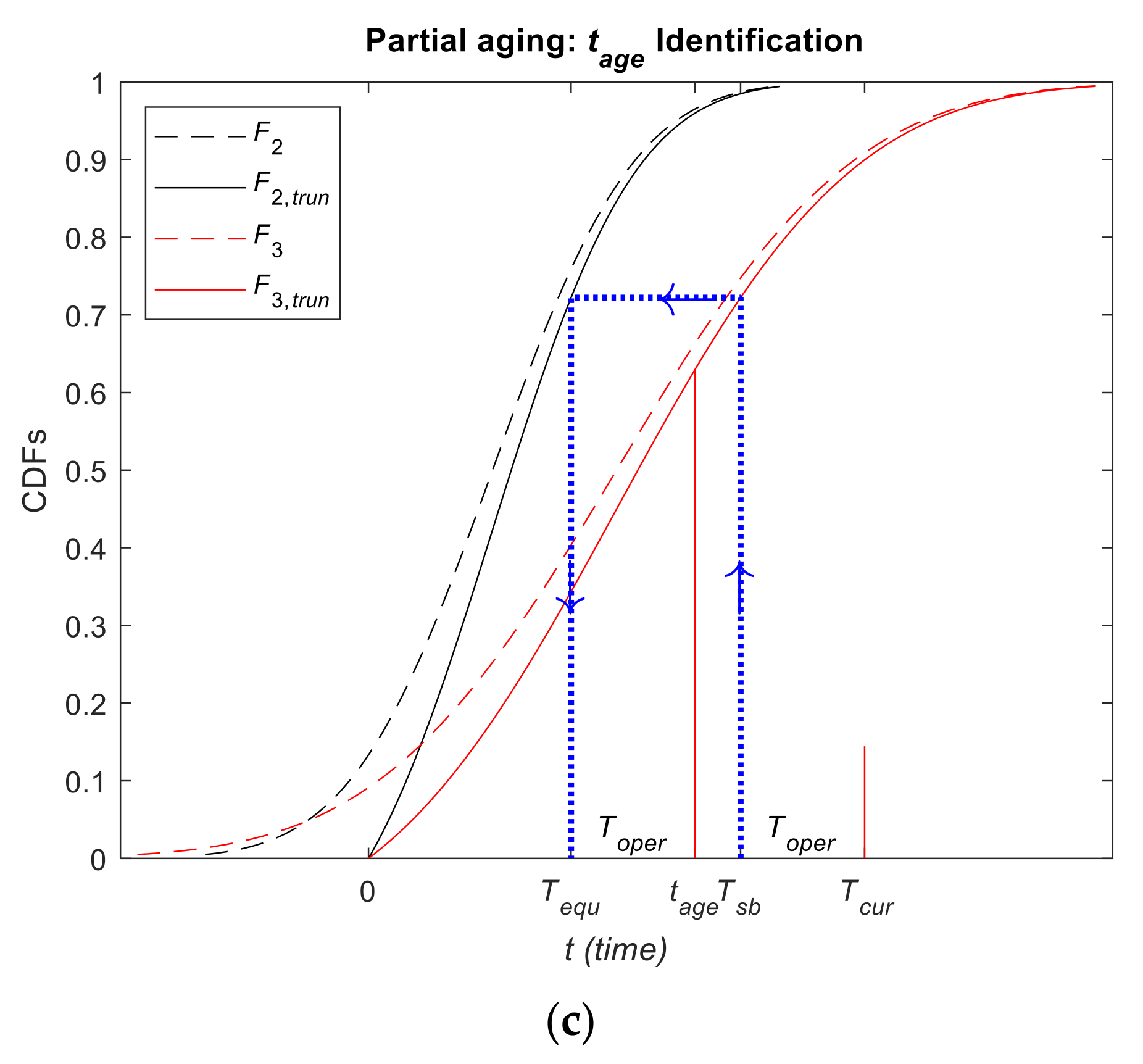
The partial aging assumption accepts that the backup component in standby ages to the same reliability as the backup component in operation during the equivalent operating time
(see
Figure 2c):
Equation (38) in simplified form was firstly proposed in [
22], where it was successfully tested for Two-Component Standby System with Failures in Standby. In a real 2SBRSBF system, the failures of the backup component will be more frequent during operation than during standby which means that
F2,trun(
t) ≥
F3,trun(
t) for any non-negative time
t. This inequality, together with Equation (38), assures that practically always
. Applying Equation (15) twice to Equation (38) we get:
In Equation (39), is calculated with Equation (13) for k = 2, therefore it uses the ideas in Equation (14) for stable approximation of the equivalent operating time, , at any for arbitrary incomplete EC from Equation (23) describing the behavior of a 2SBRSBF.
Under the partial aging assumption, the 2SBRSBF cannot be described with a DAE system since no RD adequately reflects the reliability behavior of the 2SBRSBF similarly to the no aging assumption. Again, for Second Case distributions, the only possible solution is the simulational one.
We combined Equations (33)–(37) into a six-attribute procedure, TAGEASS(.), which gives numerically stable estimates for the equivalent age,
tage, of the backup unit under any of the three aging assumptions:
In Equation (40), the variable
FlagA is 1, 2 or 3, respectively when the 2SBRSBF operates under the full aging, no aging, or partial aging assumptions. Then Equation (40) can be estimated using Algorithm 1.
| Algorithm 1 Equivalent Age Estimation in the jth Pseudo-Reality for 2SBRSBF |
- 1)
Calculate the total standby time of the backup component, Tsb, using (33). - 2)
Calculate the total operational time of the backup component, Toper, using (34). - 3)
If FlagA = 1 (full aging assumption), then calculate the equivalent operating time, Tequ, using (36). - 4)
If FlagA = 2 (no aging assumption), then calculate the equivalent operating time, Tequ, using (37). - 5)
If FlagA = 3 (partial aging assumption), then:
- 5.1)
Calculate the positive constant,
, using (13) with k = 2. - 5.2)
Calculate the probability, pequ, using the second part of (39). - 5.3)
Calculate the equivalent operating time, Tequ, the first part of (39)
- 6)
Calculate the equivalent age of the backup component, tage, using (35).
|
6.4. Extracting Reliability Information from the Simulated ECs
Let
N be a large positive integer representing the count of the randomly simulated pseudo-realities. Using Algorithm 2, we can simulate
ECj, for
j = 1,2, …,
N. In this section, we will extract the reliability information from the simulated ECs, approach which is the essence of any Monte Carlo simulation [
37] (pp. 290–294).
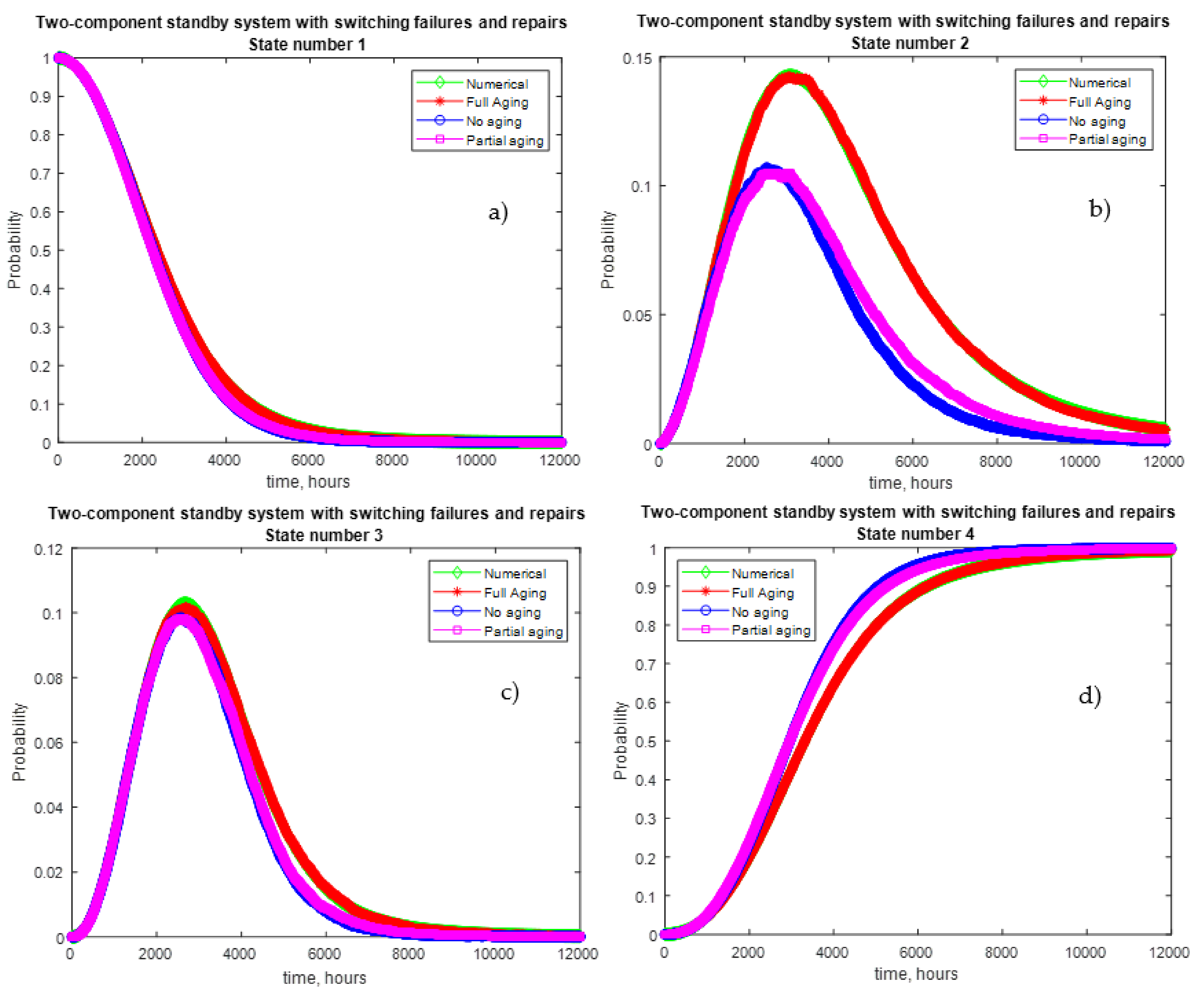
Let us calculate the state probability functions at the 2000 evenly distributed time points from 0 to
tend given in Equation (20). For a given
ECj we can estimate the state,
Sti,j, at each of the time points
ti:
From Equation (41) it is easy to estimate the values of the first three state probability functions at the time point,
ti:
In Equation (42) the is the count of all states at the time point ti which are equal to g.
The fourth state probability function can be estimated using Equation (1) as:
The reliability function and the
MTTFsys can be approximated with Equations (21) and (22). According to the ES property p1, the reliability in Equation (22) has decreasing nodes:
One way to identify the
α-design life,
tdes,α for given
α is to transform the nodes,
, of the system reliability from Equation (22) into strictly decreasing purged nodes
where:
Such a purging procedure is proposed in [
17], where the algorithm is motivated, formalized, illustrated, and proven. In short, it runs in the steps summarized in Algorithm 3.
| Algorithm 3 Purging Algorithm |
- (a)
Identify the time of the first purged node as the greatest ti for which ;
- (b)
Substitute all internal nodes with equal reliability with one purged node in the center of the horizontal platform; - (c)
Identify the time of the last purged node as the smallest ti for which .
|
Having the strictly decreasing purged system reliability function, we can identify the
α-design life,
tdes,α for any
:
As discussed in
Section 3, the reliability numerical characteristics
Mediansys,
B1
_life,
B10
_life, and
IQRsys can be estimated as
respectively by applying Equation (46) five times.
The simulational solution is universal and exists even when the numerical and analytical solutions are impossible. Even when the numerical and the analytical solutions exist, the simulational solution can provide richer reliability information.
For example, it is obvious that the 2SBRSBF system will have 100% chance to ever be in the State 1. It is also clear that if tend is correctly selected, then the 2SBRSBF system will have more than 99% chance to ever be in the State 4. However, it is interesting to know the chance,
P2,ever, for the 2SBRSBF system to ever be in the State 2, since that probability will help us plan the resources needed for the repair of the primary unit. Similarly, the chance,
P3,ever, for the 2SBRSBF system to ever be in the State 3 is important, since that will show us the prevalence of the failure in standby of the backup unit. So, for a given 2SBRSBF system, we can estimate the chances,
Pg,ever, for
g = 1,2,3:
In Equation (47),
is the count of pseudo-realities in which State
g can be found at least once. Similarly, for a given 2SBRSBF system we can estimate the chance,
P4,ever as:
In Equation (48), is the count of pseudo-realities in which State 4 (system failure) can be found at least once.
As another example for reliability information, which can be acquired neither with the numerical, nor with the analytical solution, can be found in the four conditional chances,
(for
g = 40, 41, 42, 43), of the 2SBRSBF system to have respectively type
b, type
a, type
c, or type
d system failure, provided that system has failed:
The information in Equation (49) allows to identify the types of system failures which dominate the 2SBRSBF system. That knowledge will increase the efficiency of the reliability improvement measures. Equations (42), (47)–(49) use the frequentist interpretation of probability [
40] (pp. 42–43).
Knowing how to simulate an EC for the jth pseudo-reality of a 2SBRSBF system, allows us to develop the simulational solution of a given 2SBRSBF system. We have the following given:
- (1)
For each k = 1, 2, 3, 4, the original CDFs, Fk(t), defined for any real argument.
- (2)
For each k = 1, 2, 3, 4, the original inverse CDFs , defined for any p belonging to the unit interval.
- (3)
The probability, pf, for switching failure on demand.
- (4)
The probability, pr, for back-switching failure on demand.
- (5)
The value of the FlagA, which determines under which aging assumption the 2SBRSBF operates.
The proposed algorithm in [
17] uses simulation to find the reliability characteristics of a two-component standby systems with switching failures and aging in standby. The simulational solution for 2SBRSBF system can be obtained through a generalization of that algorithm, which is formalized as Algorithm 4 below.
| Algorithm 4 Simulational Solution of a 2SBRSBF System |
- 1)
Select the count N of pseudo-realities to be simulated as a large integer. - 2)
Select the final simulation time, tend, as a positive real number. - 3)
Set, j = 1 (initiate the consecutive number of the simulated pseudo-reality) - 4)
Generate the ECj, using Algorithm 2. - 5)
Set, j = j + 1 (move to next pseudo-reality). - 6)
If j ≤ N, then go to Step 4 (repeat the EC generation N times). - 7)
Estimate 2000 equally spaced times, ti, in the closed interval [0, tend] using Equation (20). - 8)
Estimate the states, Sti,j, using Equation (41). - 9)
Estimate the first three state probability functions, at the time points ti using Equation (42). - 10)
Estimate the fourth state probability function, , at the time point ti using Equation (43). - 11)
Estimate the system reliability function,
at the time point ti using Equation (21). - 12)
Estimate the system mean time to failure, using Equation (22). - 13)
Estimate the nodes,
, of the invertible reliability function using Algorithm 3. - 14)
Estimate the design lives,
using Equation (46) five times. - 15)
Set the median time,
. - 16)
Set the B1 life,
. - 17)
Set the B10 life,
. - 18)
Set the interquartile range,
. - 19)
Estimate the first three unconditional chances,
using Equation (47). - 20)
Estimate the fourth unconditional chance, P4,ever using Equation (48). - 21)
Estimate the conditional chances,
(for g = 40, 41, 42, 43) using Equation (49).
|
With the formulation of Algorithm 4 the universal simulational solution for a 2SBRSBF system is complete.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}