
Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Koopman Operator Theory for Infinite-Dimensional Systems
2.1. Koopman Semigroup
2.2. Lie Generator
2.3. Finite-Dimensional Representation
3. Spectral Analysis and Extended Dynamic Mode Decomposition
3.1. Spectrum of the Koopman Operator
Case of Linear Systems
3.2. Extended Dynamic Mode Decomposition for Infinite-Dimensional Systems
- 1.
- Compute the data matrices:and:
- 2.
- Provided that , a matrix approximation of is given by the least squares solution , where denotes the Moore-Penrose pseudoinverse of . Note that, in this case, is the discrete orthogonal projection:
- 3.
- The eigenvalues of are approximated by the eigenvalues of and estimates of the eigenvalues of the Lie generator are given by . Moreover, Koopman eigenfunctionals are approximated in the basis of functionals by the components of the corresponding (right) eigenvectors of .
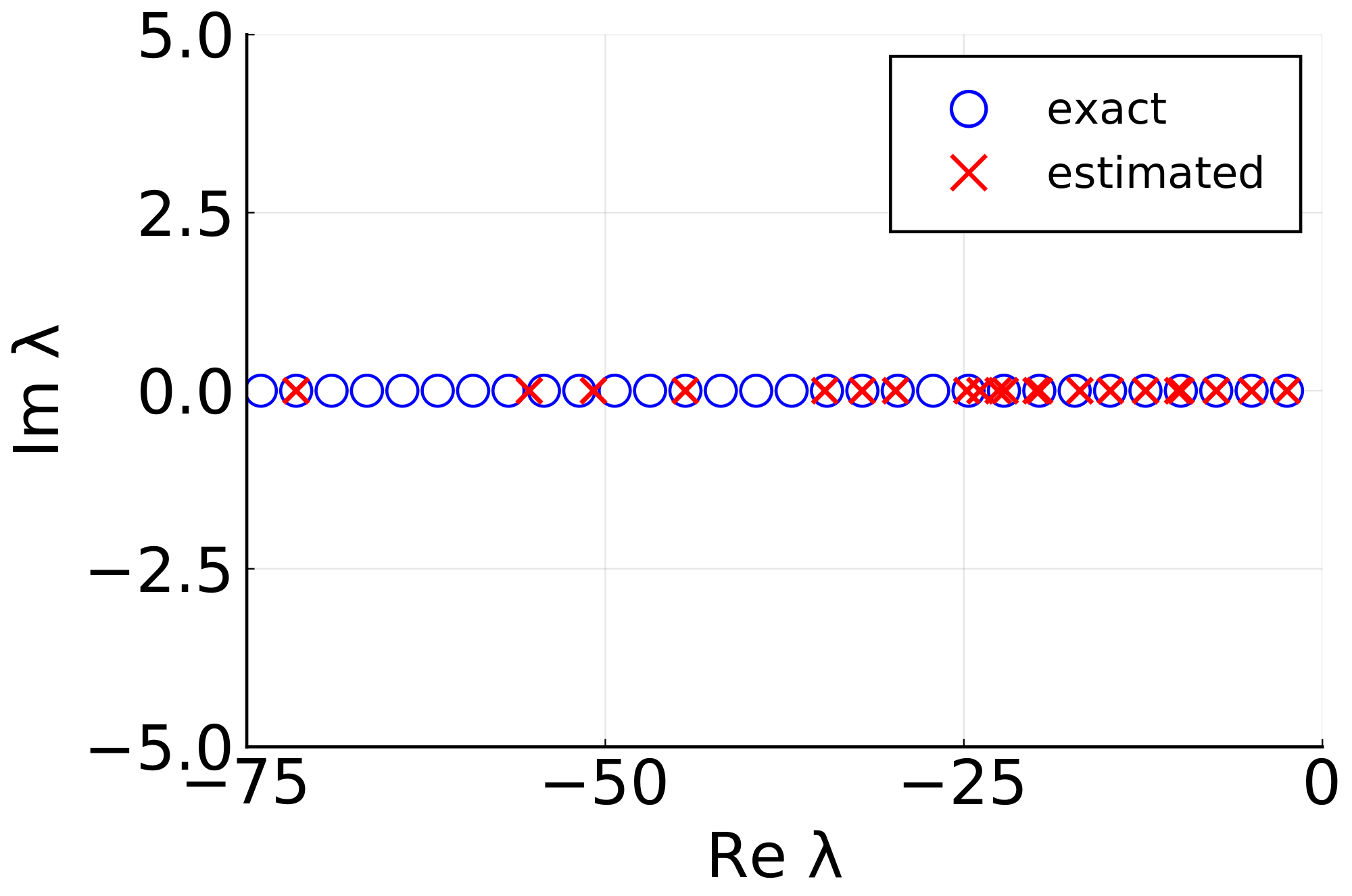
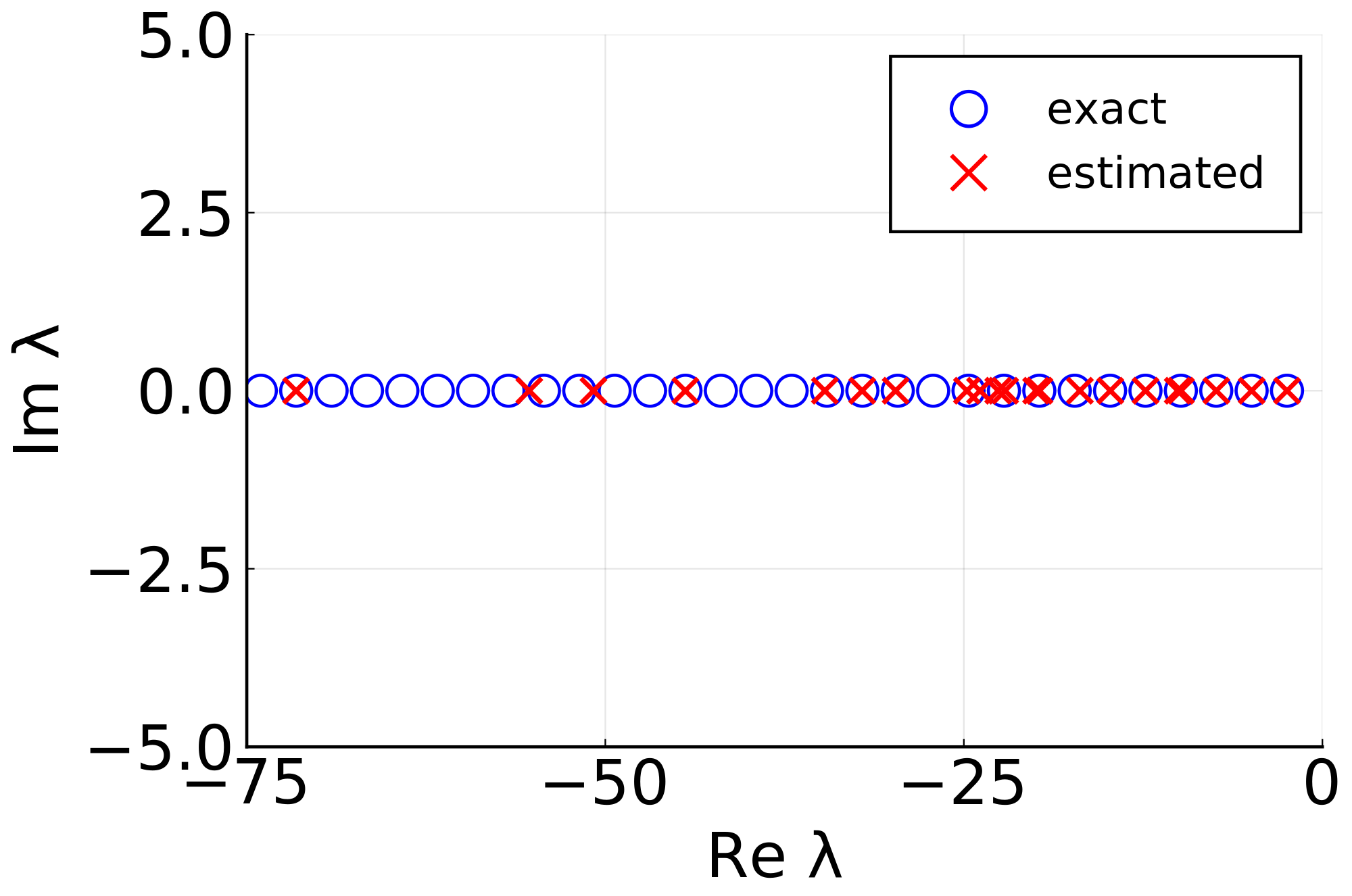
3.3. Numerical Example
4. Identification of Infinite-Dimensional Systems
4.1. Lifting Identification Method
- 1.
- 2.
- Identification of the Lie generator. We compute the matrix representation of the compression in the subspace (step 2 in Section 3.2). Then we obtain a finite-dimensional approximation of the Lie generator by taking the matrix logarithm:Note that this approximation is not equal to the matrix representation of the (see (3)).
- 3.
- Identification of the coefficients. Estimates of the coefficients are given by the entries of the first column of , i.e., .
4.2. Convergence Results
4.3. Case of Linearly Dependent Basis Functionals
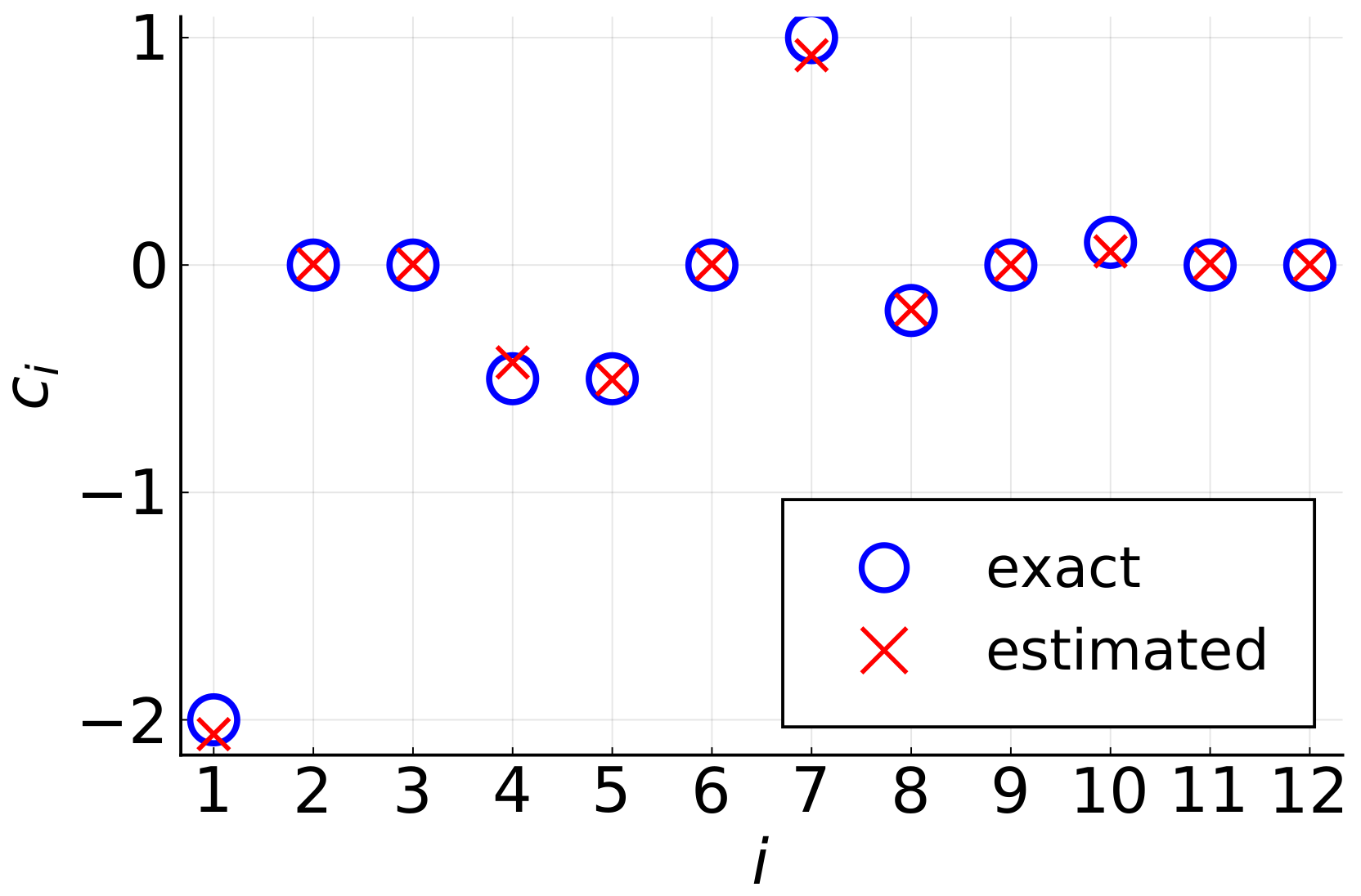
4.4. Numerical Examples
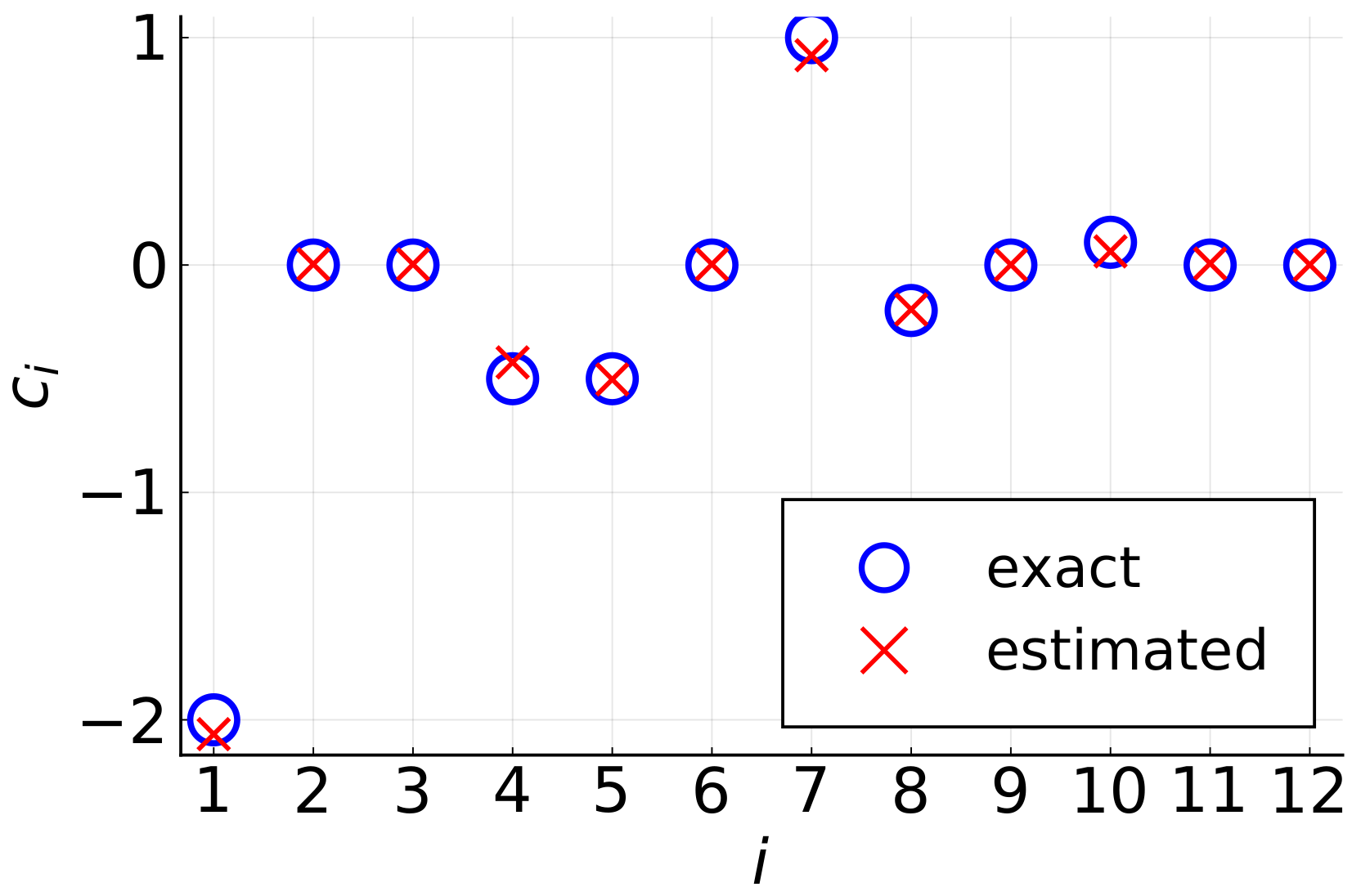
4.4.1. Nonlinear Partial Differential Equation
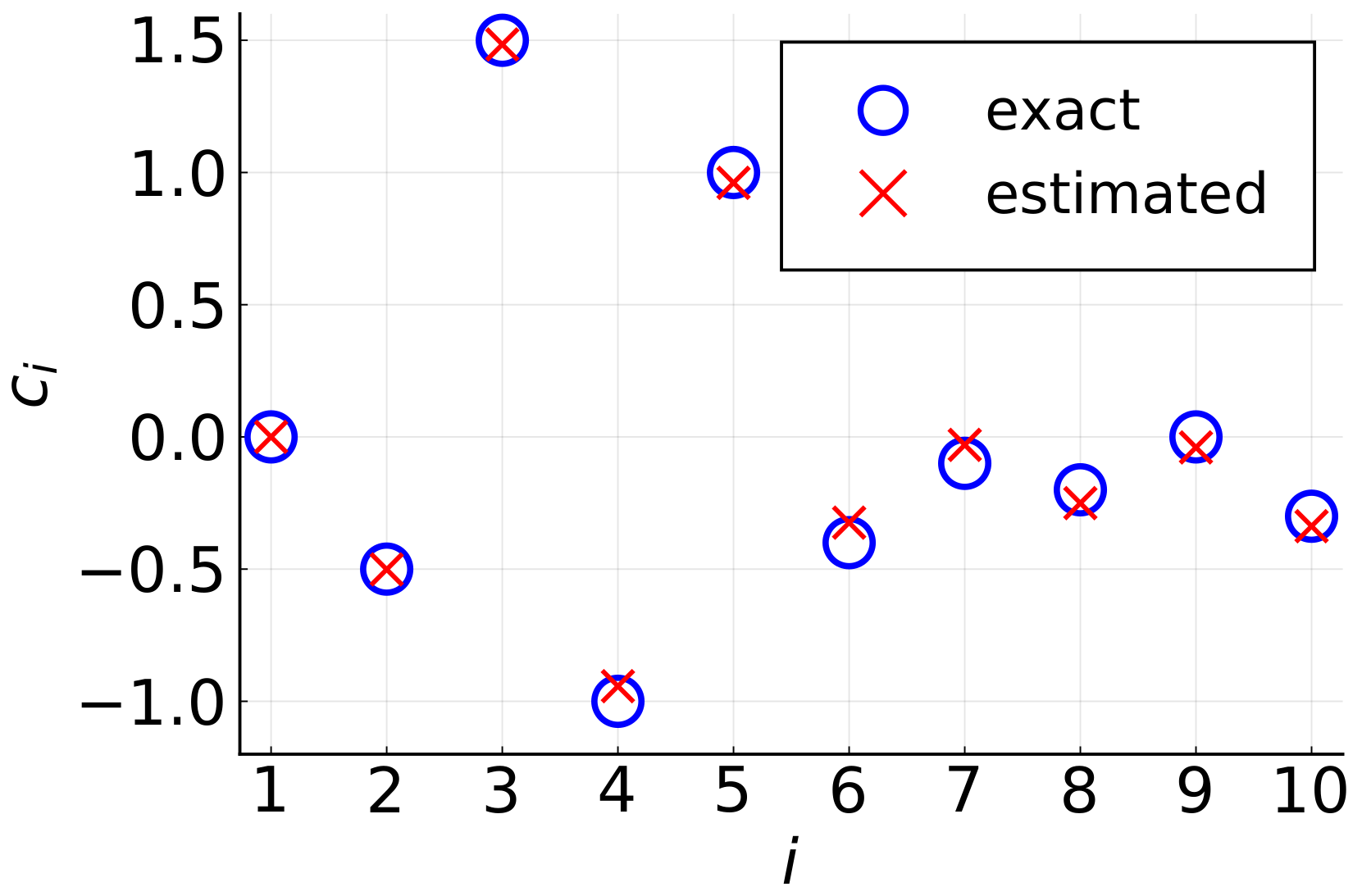
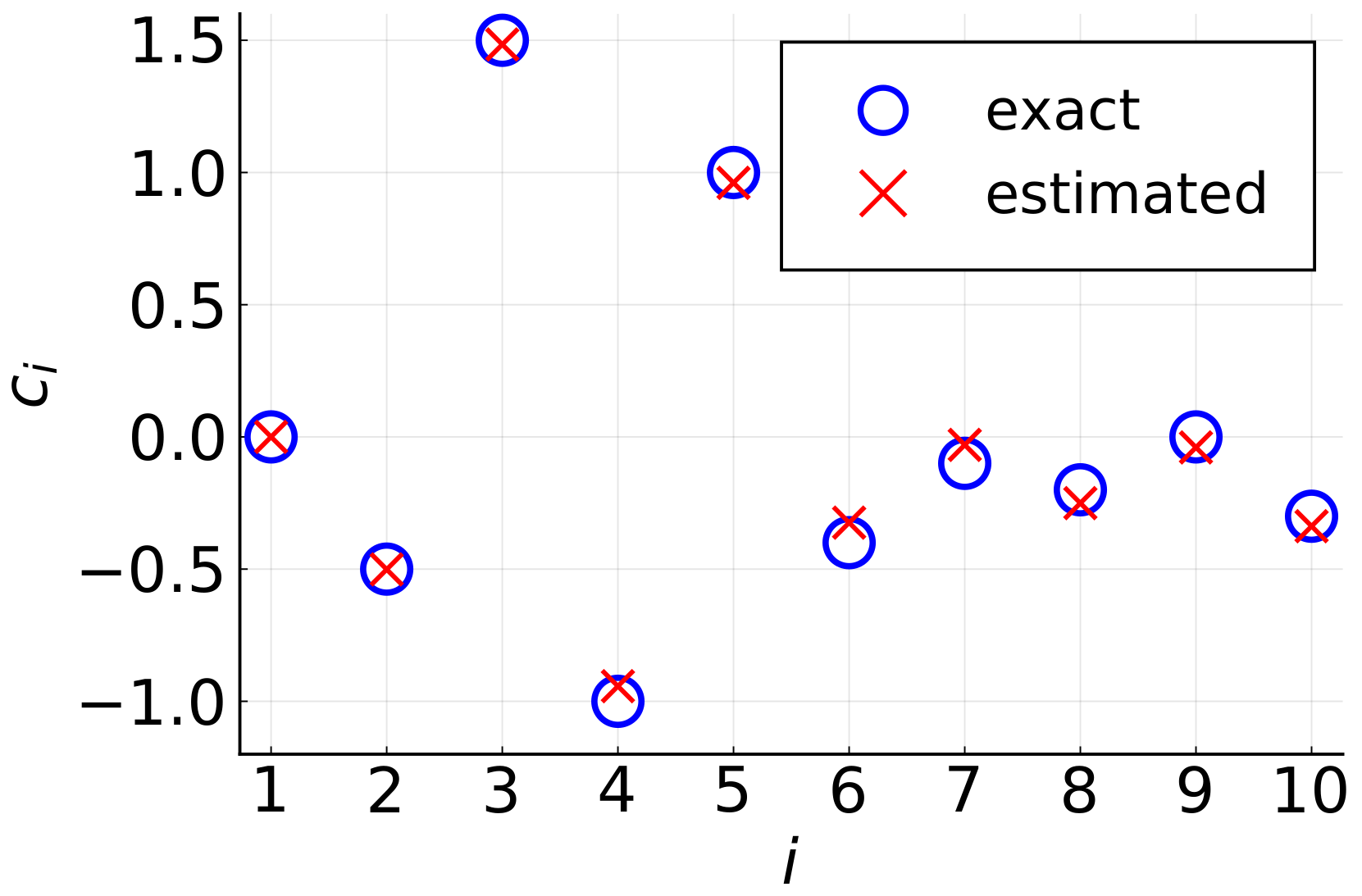
4.4.2. Nonlinear Diffusive Dynamics on a Graphon
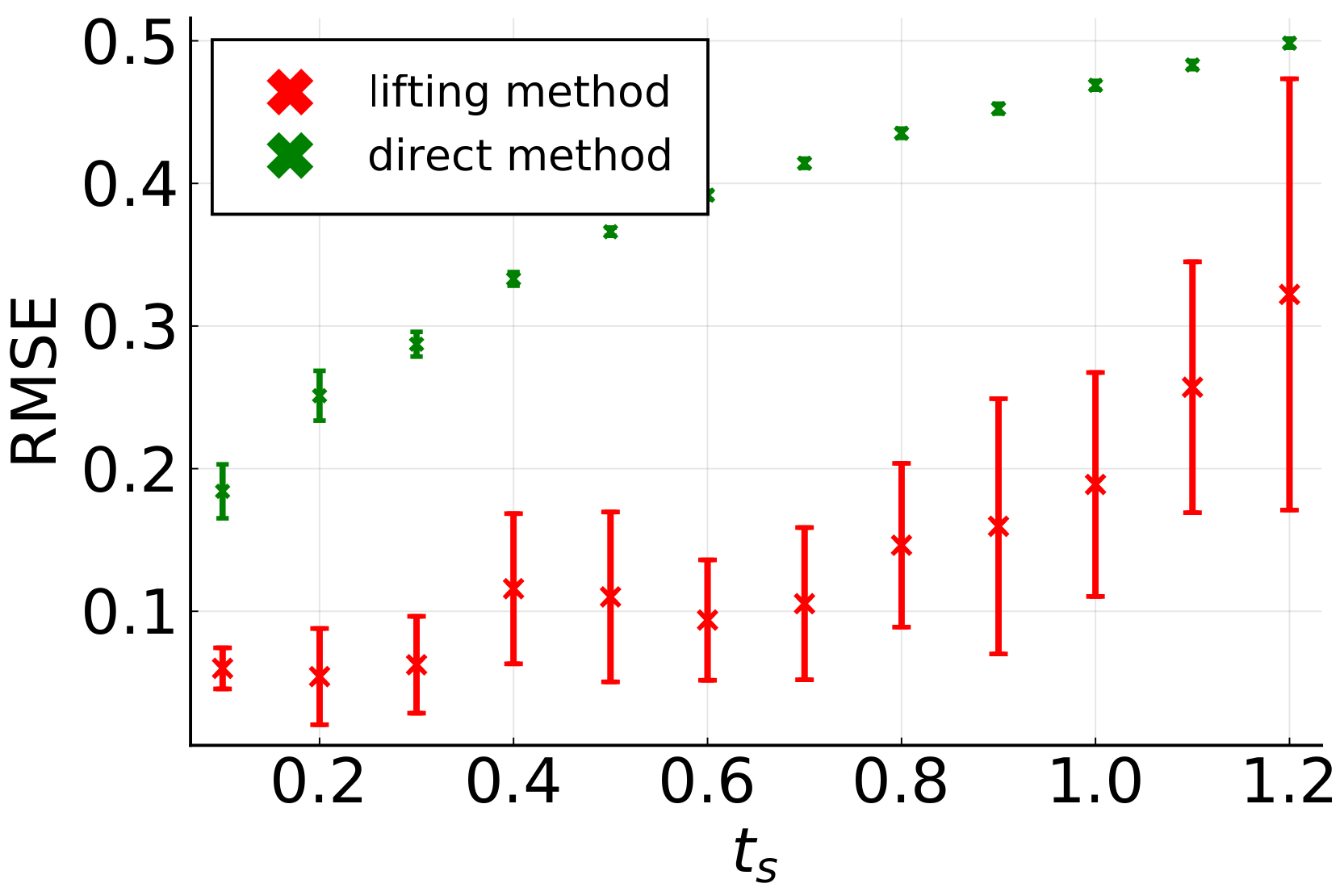
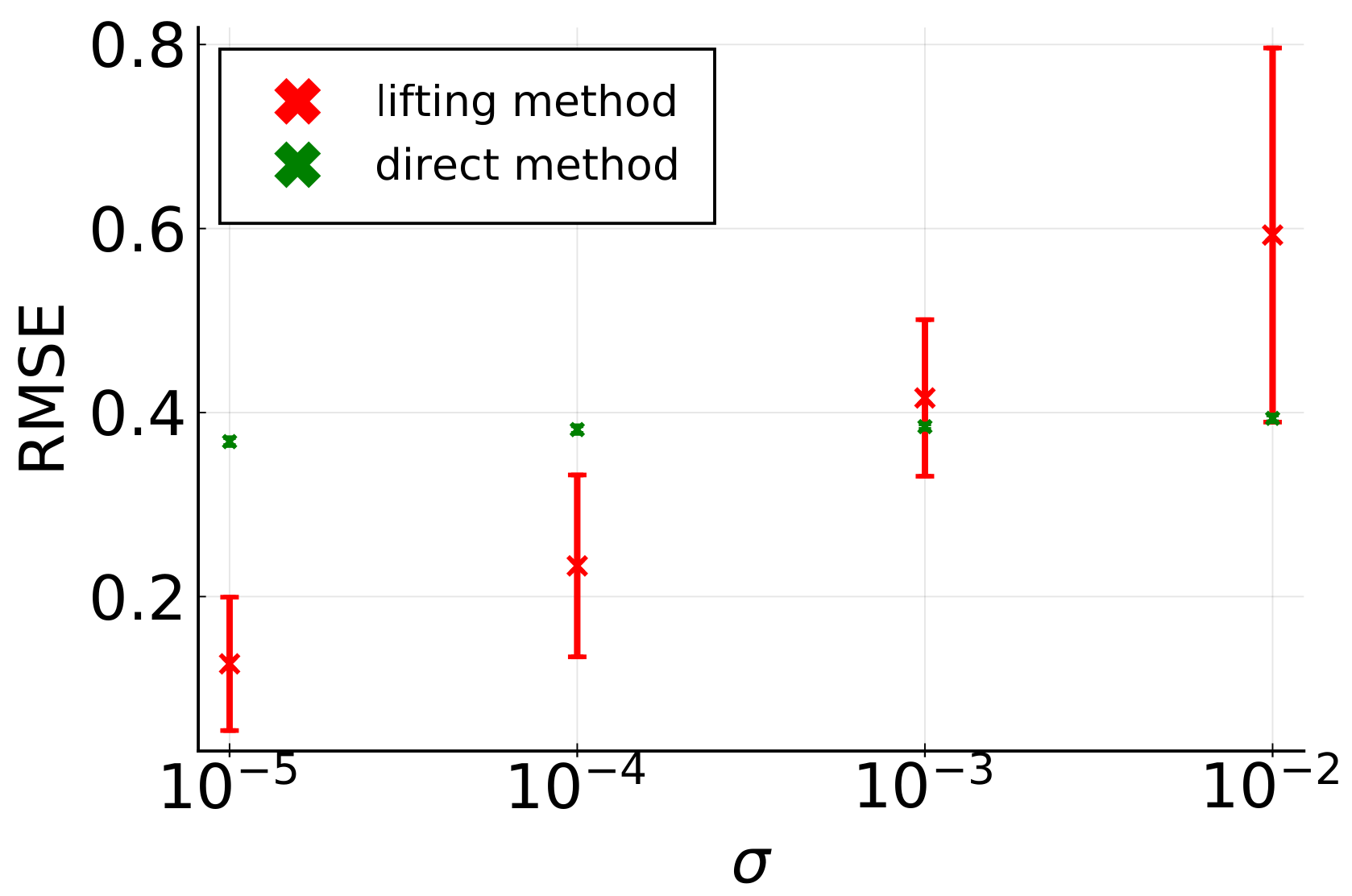
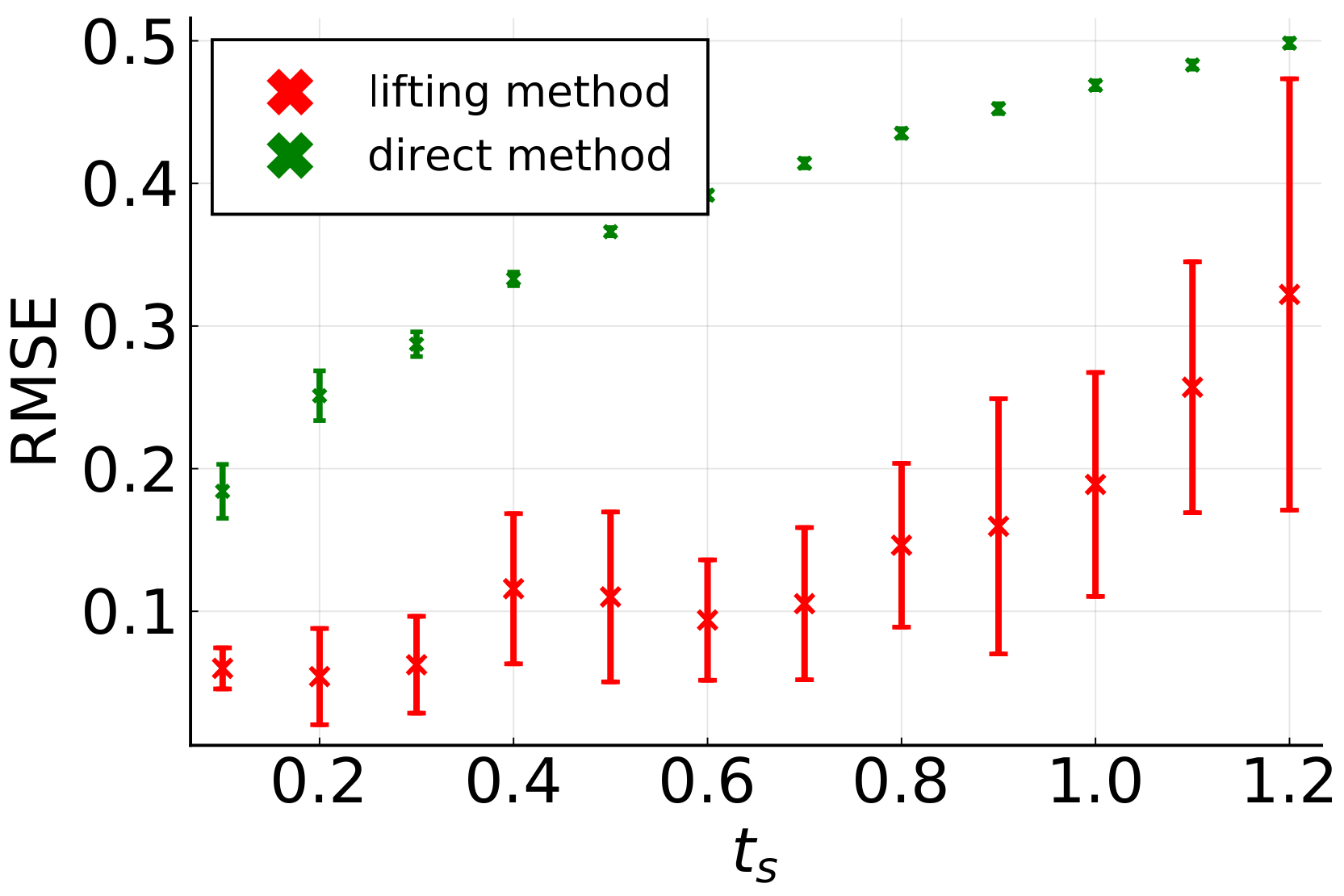
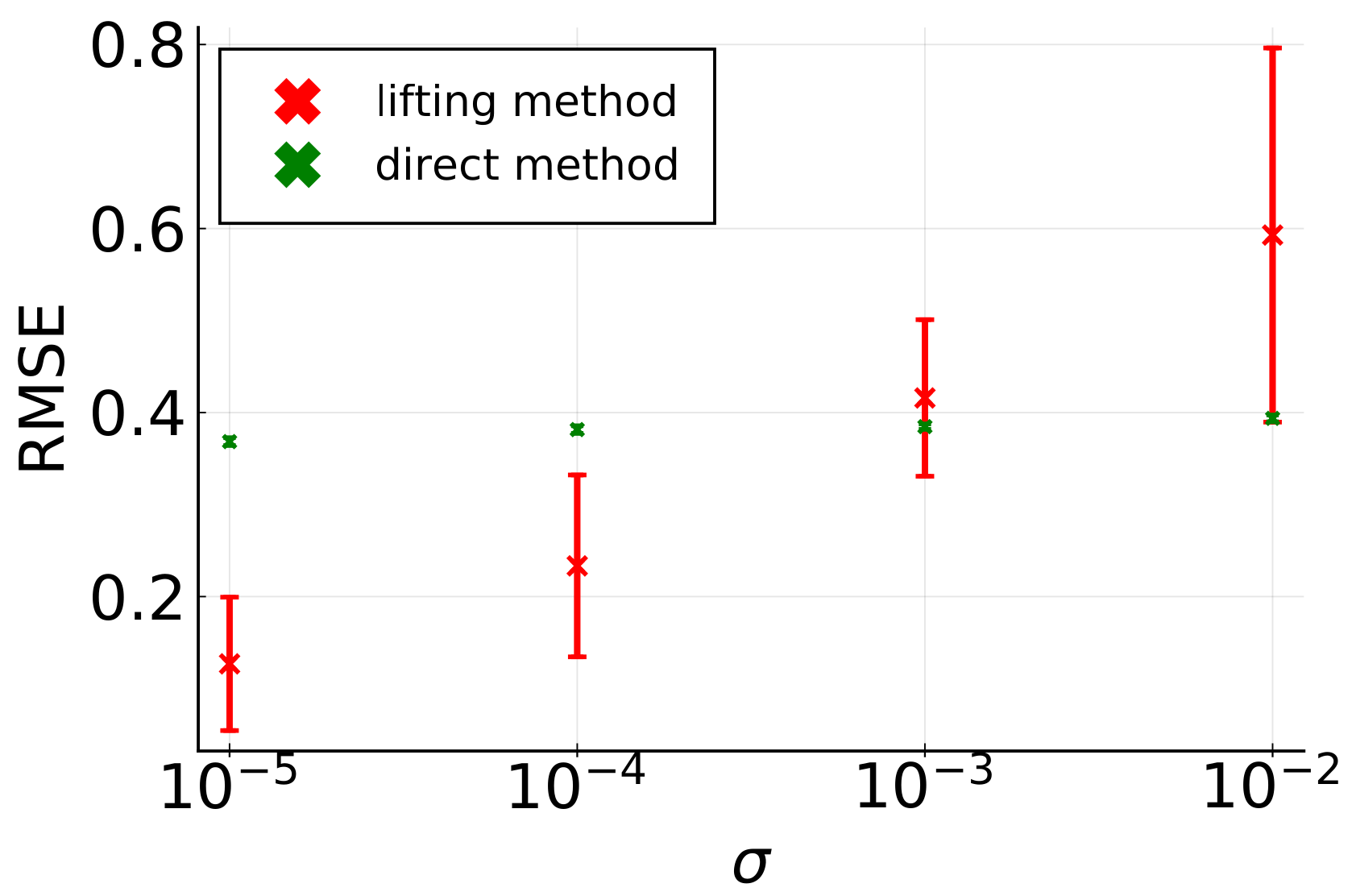
4.4.3. Numerical Performance
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Koopman, B.O. Hamiltonian systems and transformation in Hilbert space. Proc. Natl. Acad. Sci. USA 1931, 17, 315. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mezić, I. Spectral properties of dynamical systems, model reduction and decompositions. Nonlinear Dyn. 2005, 41, 309–325. [Google Scholar] [CrossRef]
- Mauroy, A.; Mezić, I.; Susuki, Y. (Eds.) The Koopman Operator in Systems and Control: Concepts, Methodologies, and Applications; Springer International Publishing: Basel, Switzerland, 2020; Volume 484. [Google Scholar]
- Banks, S.P. On the generation of infinite-dimensional bilinear systems and Volterra series. Int. J. Syst. Sci. 1985, 16, 145–160. [Google Scholar] [CrossRef]
- Dorroh, J.R.; Neuberger, J.W. A theory of strongly continuous semigroups in terms of Lie generators. J. Funct. Anal. 1996, 136, 114–126. [Google Scholar] [CrossRef] [Green Version]
- Farkas, B.; Kreidler, H. Towards a Koopman theory for dynamical systems on completely regular spaces. Philos. Trans. R. Soc. A 2020, 378, 20190617. [Google Scholar] [CrossRef] [PubMed]
- Mezić, I. Spectral Koopman Operator Methods in Dynamical Systems; Springer International Publishing: Basel, Switzerland, 2020; in preparation. [Google Scholar]
- Nakao, H.; Mezić, I. Spectral analysis of the Koopman operator for partial differential equations. Chaos 2020, 30, 113131. [Google Scholar] [CrossRef] [PubMed]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A data-driven approximation of the Koopman operator: Extending dynamic mode decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef] [Green Version]
- Mauroy, A.; Goncalves, J. Koopman-based lifting techniques for nonlinear systems identification. IEEE Trans. Autom. Control 2020, 65, 2550–2565. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Data-driven discovery of Koopman eigenfunctions for control. Mach. Learn. Sci. Technol. 2021, 2, 035023. [Google Scholar] [CrossRef]
- Klus, S.; Nüske, F.; Peitz, S.; Niemann, J.-H.; Clementi, C.; Schütte, C. Data-driven approximation of the Koopman generator: Model reduction, system identification, and control. Phys. D Nonlinear Phenom. 2020, 406, 132416. [Google Scholar] [CrossRef] [Green Version]
- Klus, S.; Nüske, F.; Hamzi, B. Kernel-Based Approximation of the Koopman Generator and Schrödinger Operator. Entropy 2020, 22, 722. [Google Scholar] [CrossRef] [PubMed]
- Gurevich, D.R.; Reinbold, P.A.K.; Grigoriev, R.O. Robust and optimal sparse regression for nonlinear PDE models. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 103113. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Li, L.; Yue, Z.; Tang, X.; Voss, H.U.; Kurths, J.; Yuan, Y. Sparse learning of PDEs with structured dictionary matrix. Chaos 2019, 29, 043130. [Google Scholar] [CrossRef] [PubMed]
- Long, Z.; Lu, Y.; Ma, X.; Dong, B. PDE-Net: Learning PDEs from data. In Proceedings of the 35th International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 3208–3216. [Google Scholar]
- Rudy, S.H.; Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Data-driven discovery of partial differential equations. Sci. Adv. 2017, 3, e1602614. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Engel, K.J.; Nagel, R. One-Parameter Semigroups for Linear Evolution Equations; Springer: New York, NY, USA, 2000; Volume 194. [Google Scholar]
- Mauroy, A.; Mezić, I. On the use of Fourier averages to compute the global isochrons of (quasi)periodic dynamics. Chaos 2012, 22, 033112. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nakao, H.; Mezić, I. Koopman eigenfunctionals and phase-amplitude reduction of rhythmic reaction-diffusion systems. In Proceedings of the SICE Annual Conference, Nara, Japan, 11–14 September 2018; pp. 74–77. [Google Scholar]
- Tu, J.H.; Rowley, C.W.; Luchtenburg, D.M.; Brunton, S.L.; Kutz, J.N. On dynamic mode decomposition: Theory and applications. J. Comput. Dyn. 2014, 2, 391–421. [Google Scholar] [CrossRef] [Green Version]
- Korda, M.; Mezić, I. On convergence of extended dynamic mode decomposition to the Koopman operator. J. Nonlinear Sci. 2018, 28, 687–710. [Google Scholar] [CrossRef] [Green Version]
- Hopf, E. The partial differential equation ut + uux = μxx. Commun. Pure Appl. Math. 1950, 3, 201–230. [Google Scholar] [CrossRef]
- Page, J.; Kerswell, R.R. Koopman analysis of burgers equation. Phys. Rev. Fluids 2018, 3, 071901. [Google Scholar] [CrossRef] [Green Version]
- Yue, Z.; Thunberg, J.; Ljung, L.; Gonçalves, J. Identification of sparse continuous-time linear systems with low sampling rate: Exploring matrix logarithms. arXiv 2016, arXiv:1605.08590. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mauroy, A. Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems. Mathematics 2021, 9, 2495. https://doi.org/10.3390/math9192495
Mauroy A. Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems. Mathematics. 2021; 9(19):2495. https://doi.org/10.3390/math9192495
Chicago/Turabian StyleMauroy, Alexandre. 2021. "Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems" Mathematics 9, no. 19: 2495. https://doi.org/10.3390/math9192495
APA StyleMauroy, A. (2021). Koopman Operator Framework for Spectral Analysis and Identification of Infinite-Dimensional Systems. Mathematics, 9(19), 2495. https://doi.org/10.3390/math9192495