1. Introduction
Search problems have become increasingly popular recently and have attracted a significant number of researchers [
1,
2,
3,
4,
5]. The search process is considered to be that of exploring a certain area of a physical space in order to detect a searched object (SO) in this area with the search vehicle (SV) using various types of physical sensors. The basis for solving these problems is a symbiosis of models and methods from multiple branches of science, which allows establishing causal relationships among the search conditions, the physical characteristics of the SOs, and the search results.
Mathematical formulations of search problems can include various criteria [
6,
7] with the goal of the minimization or maximization of these criteria. All search problems can be divided into two groups according to the SO’s type: it can be stationary or mobile. The problems of the first type (Chapter 2 of [
1]) are easier to solve than the problems of mobile SOs (Chapter 3 of [
1,
5]), since the parameters of their movement may be unknown to the SV. The problems of the second type have become popular in recent years due to the development of unmanned vehicles such as unmanned aerial vehicles (UAVs) or unmanned underwater vehicles (UUVs), operating in a largely unpredictable and uncertain marine environment [
1,
8].
The practical applications of such autonomous vehicles and search problems can vary from environmental monitoring and geological exploration to combat and reconnaissance tasks. Therefore, the parameters of the mathematical models can vary greatly depending on the different characteristics of real-world objects and their operating conditions. The problem considered in this article can be applied to objects in the marine environment such as UUVs or autonomous surface vehicles (ASVs), which can serve as both the SO and SV in the model under discussion.
The search can be performed by one [
3,
5] or several SVs [
9,
10]. If the SV and SO are on conflicting sides and the search itself is undesirable for the SO [
11,
12], then we can talk about the so-called threat environment [
13,
14]. Several SVs can be connected in a network structure and form a dynamically changing threat map [
10,
15]. The task of the SO (UUV or UAV) in this case is to avoid these threats while moving. The trajectory planning problem can be formulated for the SO when the threat mapping is known. If the dynamics of the SO is also known, then these problems are classical problems of deterministic optimal control.
If the SV presents a danger to the SO, the problem of interception can be considered. There is a vast class of such problems with various formulations and models of the moving vehicles. These models may include restrictions on the maneuverability of the vehicles [
16,
17,
18]. Moreover, the problem can be considered optimal if any criterion, as for example, the intercept time, must be minimized [
19,
20,
21]. In most problems studied in the literature, the intercepted vehicle moves along a given programmed trajectory [
22]. Meanwhile, real vehicles as a rule move in a stochastic way, and this case is considered in the presented article.
The article relates to various branches of mathematics, such as stochastic control, guidance, information processing and search, and optimization, and is devoted to the problem of the optimal interception of an SV that moves randomly on tacks along a given course and searches for a target SO. The interception is carried out by a controlled mobile vehicle protecting the target SO. The presence of an arbitrarily maneuvering search vehicle requires an adequate mathematical formalization in the form of a stochastic control problem. The maneuvering process can be conveniently formalized using a jump-like Markov process with a given state vector and a given matrix of the transition intensities between these states. Such a model allows us to describe the trajectory of the SV in the form of a linear stochastic differential equation, which makes it possible to obtain the equations of the evolution of the mathematical expectation and variance. These equations allow us to formulate the problem of SV interception by the controlled vehicle with the criterion of a predicted miss or with a given mathematical expectation of a miss at the final position of the SV [
16,
17,
18,
19,
20,
21]. The purpose of the article is to find an interception trajectory of the controlled defender vehicle as a result of solving the optimal stochastic control problem and comparing this trajectory with classical guidance algorithms such as the pursuit guidance method and the method of proportional navigation guidance [
23,
24,
25].
The considered problem belongs to the “attacker–target–defender” type [
26,
27,
28], the essence of which is a counteraction to the SV (attacker) from the SO (target), which can be a certain strategically important mobile vehicle, by using an autonomous attacking robotic complex (defender), for example an UAV or UUV.
In this article, by SV, we mean a vehicle moving programmatically or randomly on a plane equipped with a circular detection zone of a fixed radius. The goal of the SV is to detect the SO, i.e., to cover the point of the plane depicting the SO with its detection zone and maximize some functional that characterizes the reliability of detecting the SO in this zone. The reliability of the detection (probability of correct classification) of the SV may depend on various physical factors, in particular on the time spent by the SO in the detection zone, its current distance from the SV, the direction of the velocity vector of the SO, etc. [
29].
We considered the SO to be able to observe the real trajectory of the SV and evaluate the characteristics of its movement, i.e., current coordinates and components of the velocity vector. At some point in time, the SO releases a mobile defender, which moves autonomously and stealthily and does not have a communication channel with the SO. It was also assumed that the defender can evaluate the current motion characteristics of the SV using its passive onboard sensors. The stealthiness of the defender is provided, in particular, with its low velocity.
The proposed work has the following structure. In
Section 2, the model of the SV with a given detection zone is considered.
Section 3 contains a statistic description of the detection probability of the SO moving along a straight-line trajectory. In
Section 4, the interception problem is formulated as an optimal stochastic control problem. This problem is analytically solved in
Section 5, and the obtained results are discussed and illustrated with simulation examples in
Section 6.
Section 7 concludes the article and suggests the direction for future work.
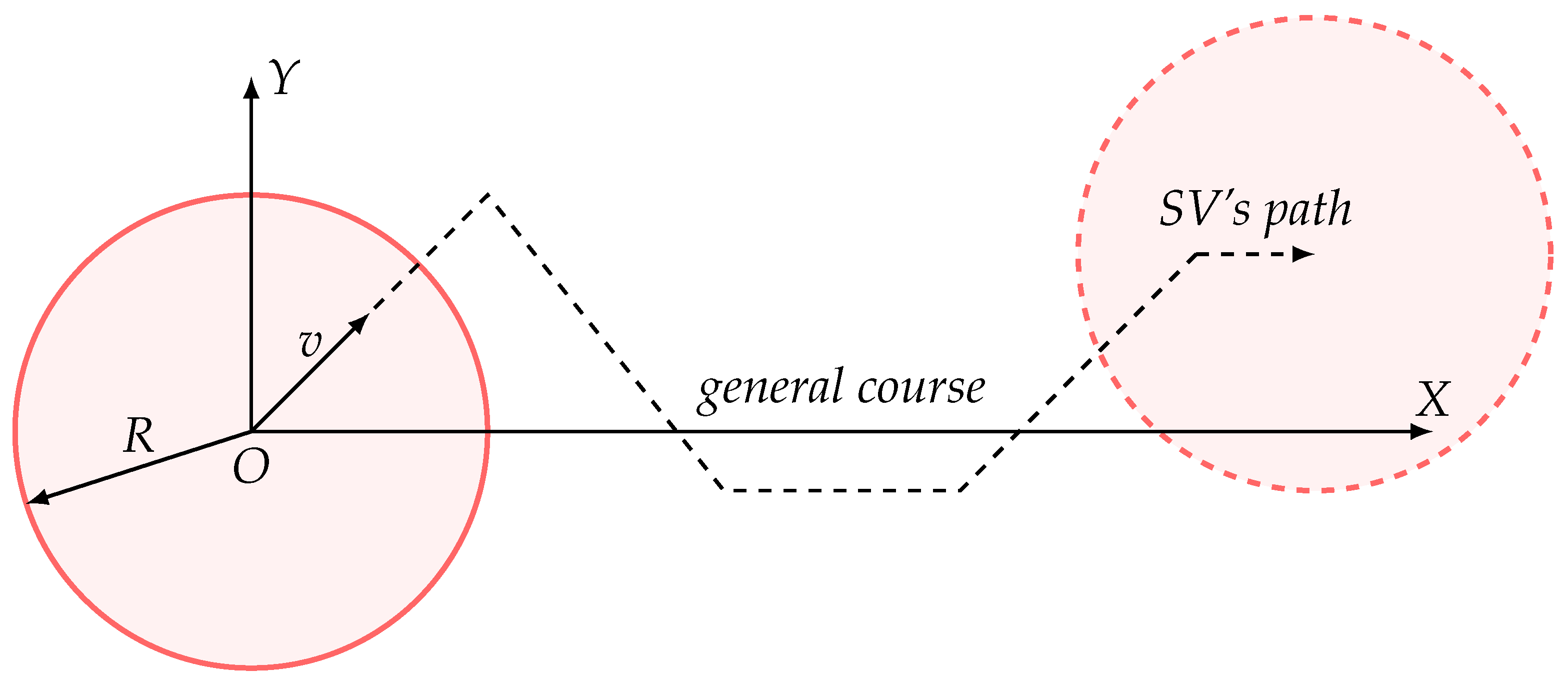
2. Model of the SV’s Movement on Tacks
The search system consists of one SV, which has a circle detection zone of radius
R. The SV moves piecewise-rectilinearly on a plane, tacking randomly around the line of the general course. The origin
O of the stationary Cartesian coordinate system
is situated in the initial position of the SV, as shown in
Figure 1. This coordinate system is oriented in such a way that its
axis coincides with the line of the general course of the SV.
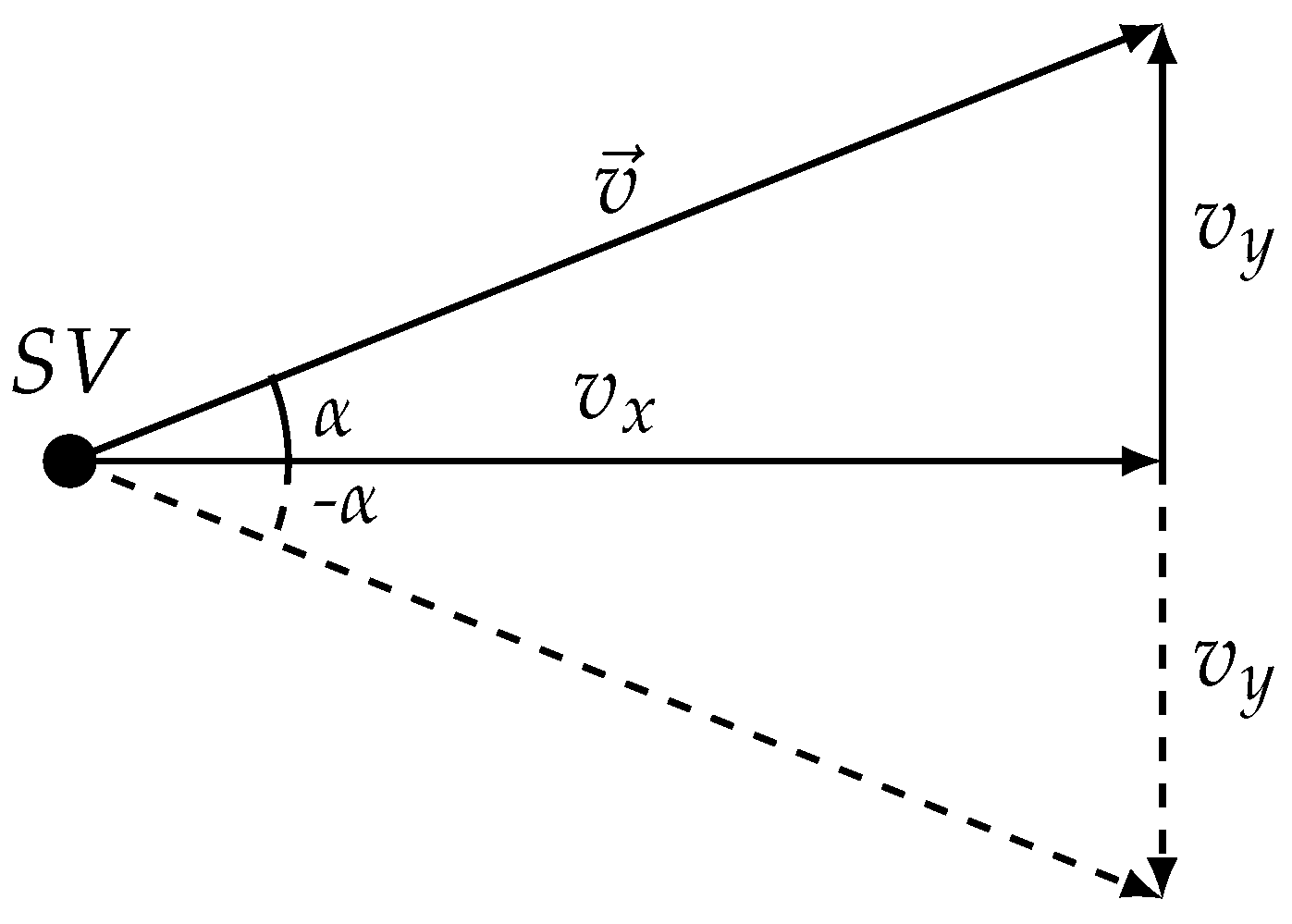
The SV moves on tacks in accordance with the following law:
where
is the specified tacking angle,
v is the SV’s search speed, and
is a random jump-like Markov process. The component of the SV’s velocity vector
along the line of the general course is constant:
Figure 2 shows a velocity diagram of the SV. As follows from (
1), tacking was performed by periodically changing the velocity component
according to a random Markov process
with a finite vector of states
and a given matrix of the transition intensities between these states
. This article discusses the case of processes with three states
. This means that the SV’s velocity vector can coincide with the general course line (
) or deviate from it by a constant angle equal to
(when
), as shown in
Figure 2.
We considered transitions between process states equally possible with transition intensity matrix:
corresponding to the state vector
J. The variable
here is
, where
is the average time of the SV being on one tack. This model generates random trajectories that have the approximate shape shown in
Figure 1.
For the mathematical formulation of the stochastic optimization problem, it is convenient to study the Gaussian Markov analog instead of the jump-like process
. This diffusion process
has the same mathematical expectation and correlation function as the process
. It follows from the theory of jump-like Markov processes that
allows the stochastic Ito differential [
30]:
where
is a standard Wiener process and
are constants related to the original Markov process
:
and
.
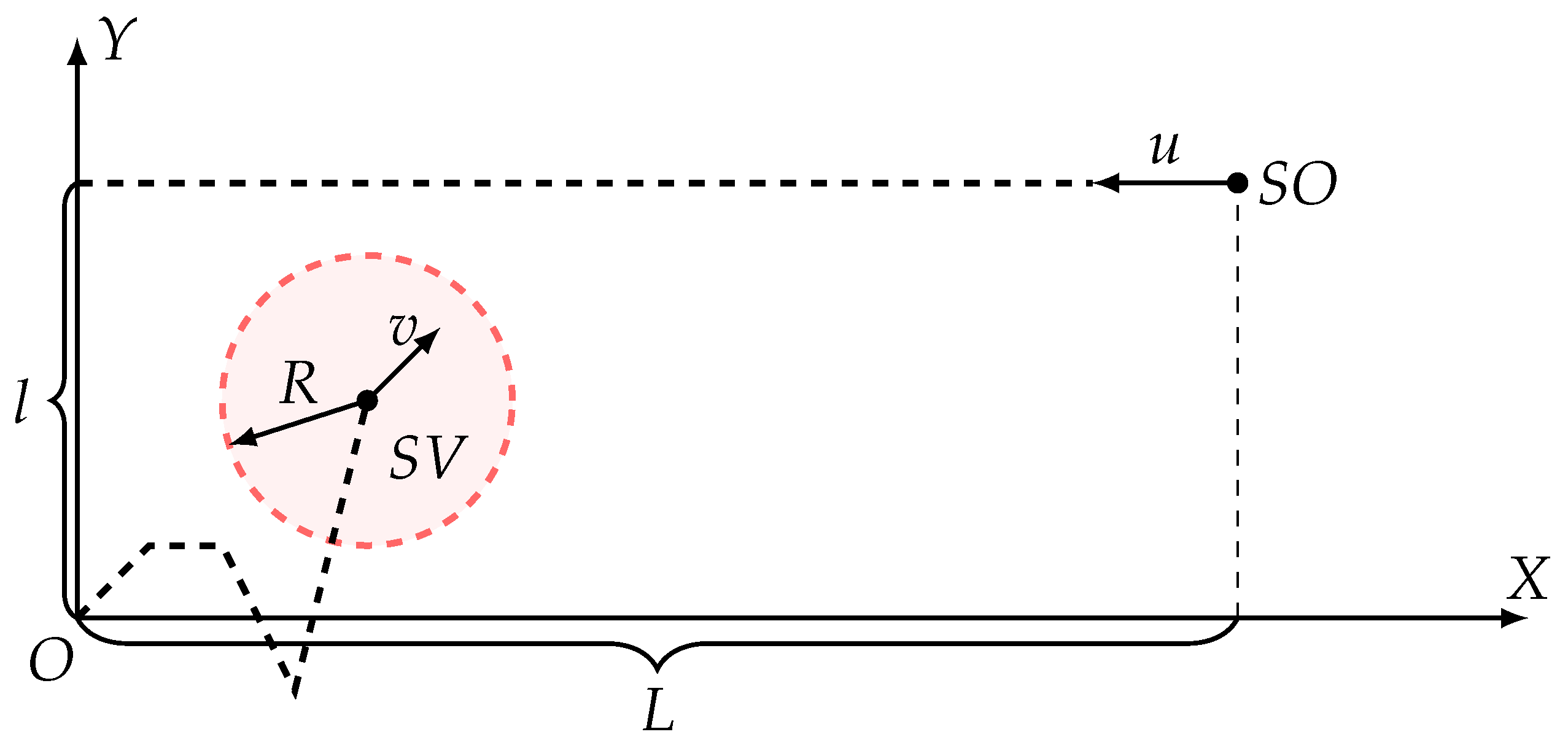
3. Detection Probability of the SO Moving at a Constant Velocity
Firstly, let us consider the task of detecting a target SO (target) with the SV, whose dynamics is described in
Section 2. The following model was investigated. The target moves at a constant speed parallel to the general course line of the SV at a distance
l from it.
The initial distance between the vehicles along the general course is
L, so the initial Cartesian distance is
. The SV is moving according to (
1), where
is a random Markov process with the state vector
J and the transition matrix
from (
2). The target moves according to the law:
where
u is its constant velocity.
The target will be detected if the distance between it and the SV becomes less than R. To simplify the model, let us assume that the detection is successful when the target’s and SV’s x-coordinates become equal at some point in time: , and the inequality is satisfied for the y coordinates.
The rendezvous instant
is defined as:
The probability of detection will be determined by including the
coordinate in the interval
, namely:
As mentioned in (
3), the random jump-like Markov process
can be replaced with its Gaussian Markov analog
, which has the same mathematical expectation and correlation function as the process
.
Further, instead of calculating the random integral (
6), we estimated the target detection probability by the SV through the analytical approximation of probability histograms, obtained in the numerical simulation. We assumed that at the instant
, the target is situated in the position
and
(as shown in
Figure 3) and the velocity of the target
.
Due to the latter assumption, the SV’s detection zone can be considered as a flat-line segment with the length of the diameter instead of the circle. Thus, the detection probability can be estimated as the probability of meeting the target with this segment.
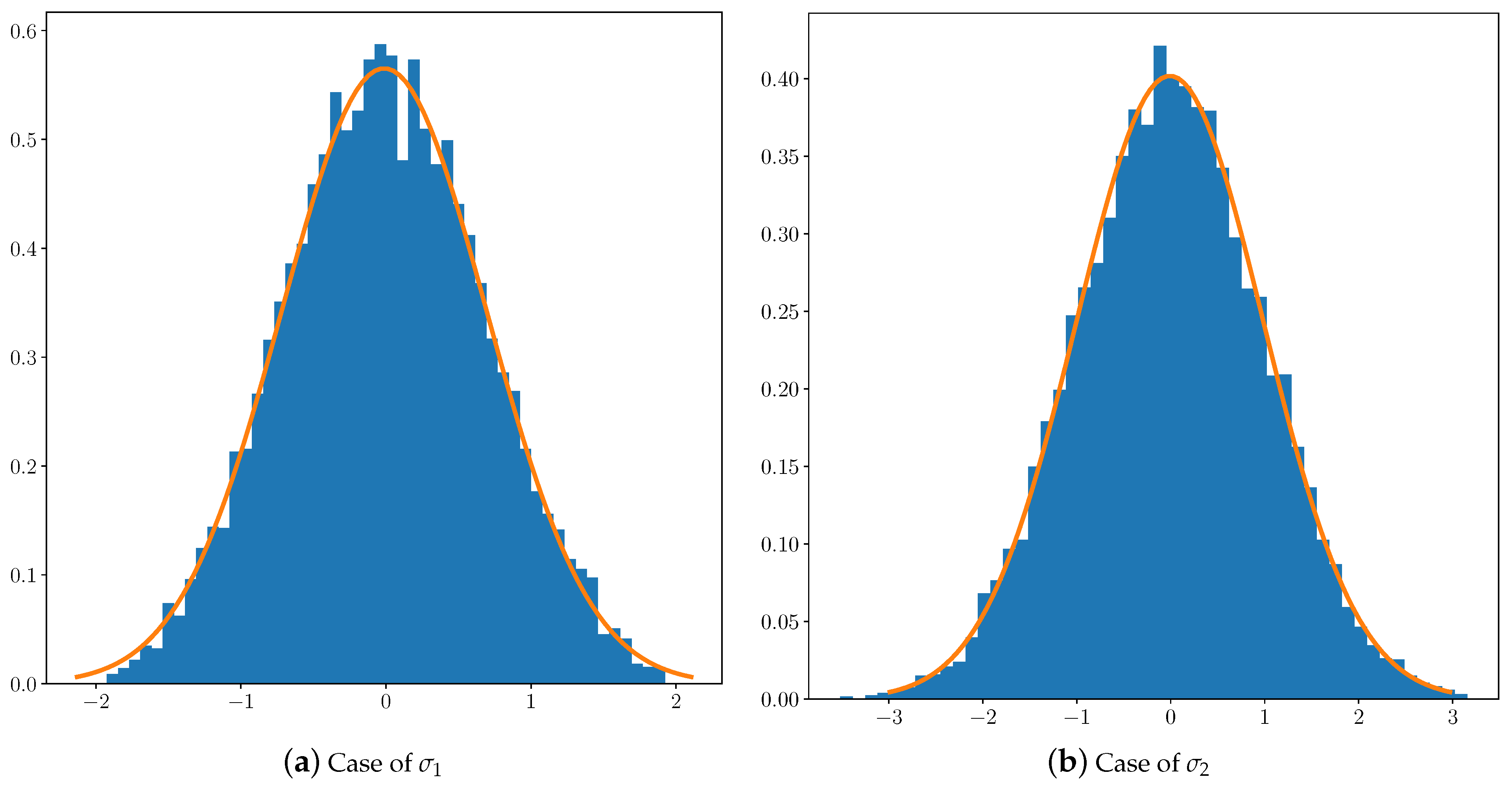
The histograms of the distribution density of the
coordinate obtained in the interval
for some small
are well approximated by the symmetric density of the Gaussian distribution.
Figure 4 depicts the histogram of the probability of meeting between the target and SV and the corresponding density of the Gaussian distributions:
for
for the case
(
Figure 4a) and
for
for the case
(
Figure 4b). The histograms were constructed as a result of computer simulation of the movement of the target and SV for 10,000 implementations of the SV trajectory corresponding to
.
These graphs allowed us to estimate the SV’s detection probability
at its various initial positions. Now, Equation (
6) may be approximated as:
where
corresponds to various parameters
. In particular, when
and
for
and
, respectively, these probabilities are presented in
Table 1. In all cases, the velocity of the target is
. All values are given in a normalized scale.
Next, we introduced a certain threshold value (security threshold) of the permissible detection probability of , for example . The situation with is considered safe. In this case, the target continues to move in a straight line without changing its course and speed. If , then the situation is considered dangerous. It was assumed that in the case of a dangerous situation, the target (to prevent the negative consequences of possible detection) uses the mobile defender mentioned in the Introduction, whose task is to intercept the SV with a minimum standard error at a given point in the plane relative to the SV.
The minimization of this miss is associated with the solution of the following optimal stochastic control problem.
4. Optimal Stochastic Control Problem
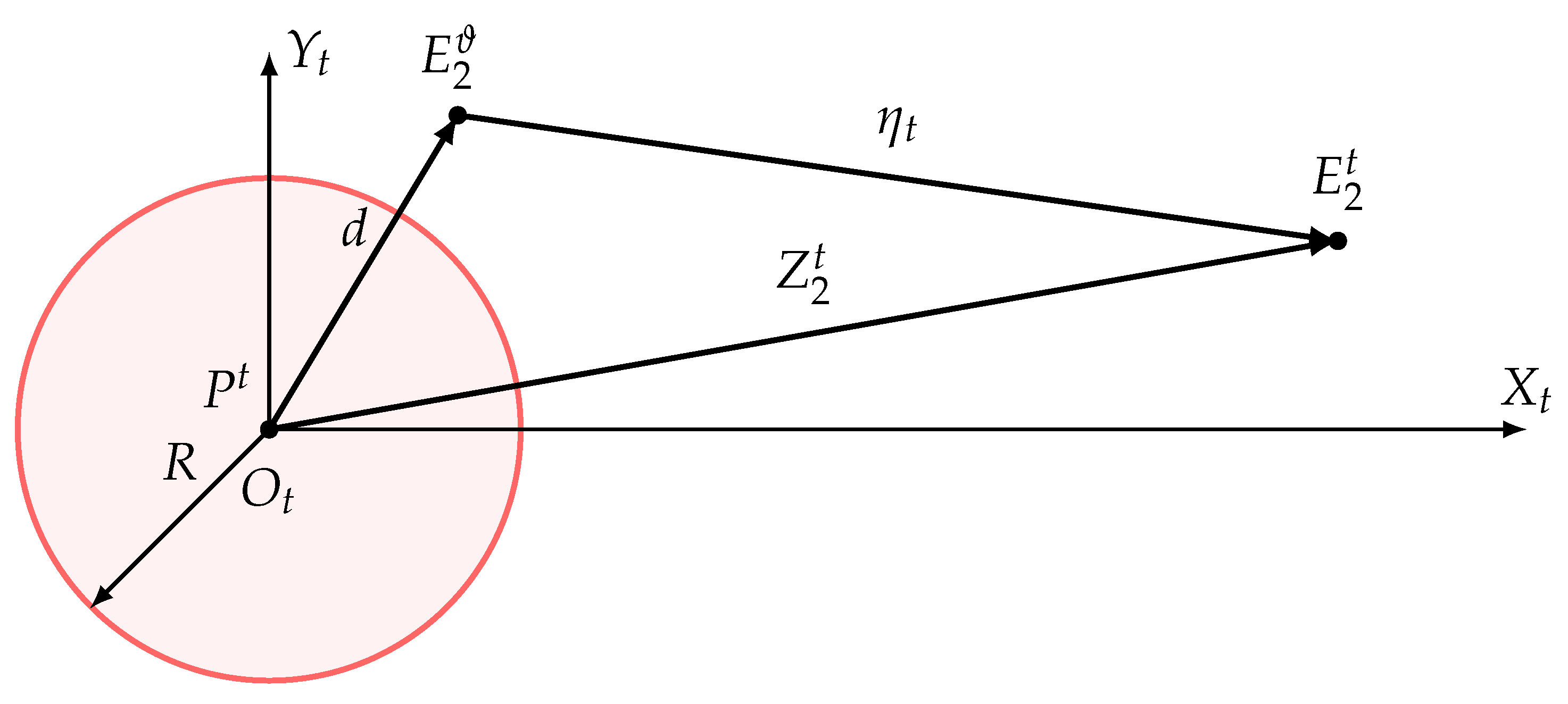
The problem was considered in a moving Cartesian coordinate system , where the origin is associated with the current position of the SV and the axis is directed parallel to the SV’s general course. The current position of the defender is given by a two-dimensional vector directed from to .
Terminal position
of the defender is defined by a given two-dimensional vector
d, as shown in
Figure 5. An auxiliary vector
was introduced for a more convenient formulation of the defender’s optimal control problem.
In the selected coordinate system, the equations of the relative motion of the defender–SV system have the form:
where
is from (
3) and the initial position of
were set. The two-dimensional velocity vector
of the defender plays the role of the control and is subject to the restrictions:
with the specified constant
.
In terms of the auxiliary vector
introduced above, the equations of motion (
8) take the compact form:
where:
At the terminal moment
, the following condition must be met:
where
is the sign of the mathematical expectation. As a criterion, we took the terminal functional:
where:
In (
13) and (
14), the summand
characterizes the standard deviation of the defender from the end of the vector
d at the terminal moment
. The term
, where
is a given constant, plays the role of an additional terminal penalty for the “convenient” or “inconvenient” tack of the SV at the time of
. Here, the words “convenient” or “inconvenient” are used in the following sense. The tack of the SV at the time of
is considered “convenient” if
, i.e., the component of the velocity of the SV along the
axis is negative (the SV is moving away from the line of the movement of the target
). Otherwise, we considered the tack of the SV “inconvenient”.
6. Examples
To demonstrate the effectiveness of the obtained optimal control, a numerical simulation was performed for two approaches for studying the interaction between the defender and SV. These approaches differ in the mathematical description of the evolution of the
y-component of the SV’s velocity. In the first (discrete) approach, this component is piecewise constant and its evolution is described as a jump-like Markov process
with three states
and the transition intensity matrix
from (
2). The description of this process is given in the beginning of
Section 2. In the second (continuous) approach, an evolution of the
y-component of the SV’s velocity vector is set by Gaussian process
, i.e., continuous diffusion process (
3).
In both approaches, the control of the defender was obtained through Equations (
31), (
33), and (
36). In other words, the control of the defender is always calculated according to the continuous diffusive model (
3) of the evolution of the
y-component of the SV’s velocity vector. Strictly speaking, as this control law is the result of the solution of the continuous problem, it should not always successfully solve the discrete problem, simulated in the first approach. The idea of these experiments is to apply the solution of the continuous problem, which can be solved analytically, to the similar discrete practical model, which cannot be studied in the same convenient way. In all experiments, vector
d was considered to be null, i.e., the defender has to intercept the SV.
Both approaches to the simulation are shown in further examples, which were devoted to two different applications of the studied interception problem.
The realization of diffusive process
was acquired in Maple with the package for stochastic equations. An approximate formula for
(
36) was used for the stochastic differential Equation (
15). Thus, Maple allows integrating this equation numerically and obtaining the optimal trajectory of the defender, as well as the random trajectory of the SV corresponding to the process with the appropriate mathematical expectation and dispersion.
A more practical discrete jump-like process
was simulated in Python script. The movement of the SV and defender was computed with a very small discretization step
, which is the quality of the simulation. At each step, the SV, according to the model from
Section 3, can change the direction of its
velocity component with probability
or not change it with probability
. However, in practice, this model is not very useful. This process is identical to a Gaussian process: the time of another SV tack is sampled exponentially with mathematical expectation
, and the direction of the vertical velocity for this tack is chosen from two directions, different from the current one with probability
. The defender, on the other hand, has its own parameter
and corrects its control law according to (
36) every interval
, considering the current positions to be initial.
6.1. Intrusion in the Detection Zone
The first application is the intrusion of the SV’s detection zone by the defender to distract the SV from the target. In normalized scale, these parameters are:
Let
. Then, the parameters for Gauss process
are:
In the coordinate system associated with the initial position of the SV, the initial coordinates of the defender’s position are in the normalized scale. The velocity of the defender was chosen as . The probability of the detection of the target following a parallel course from this coordinates equals , which is higher than the accepted security threshold . Thus, according to the above-described security concept, the target must use a mobile defender.
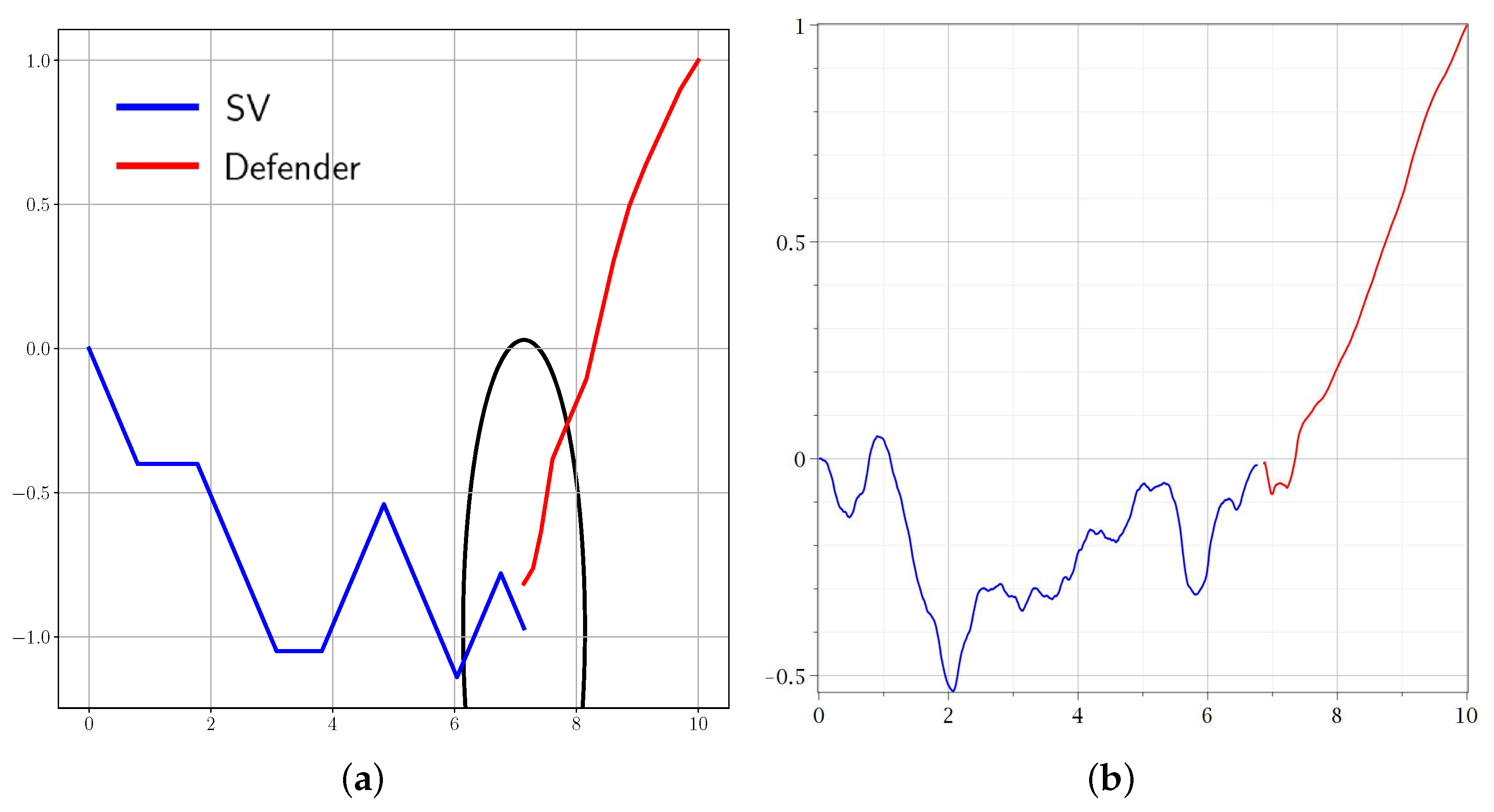
The results of this experiment are shown in
Figure 6. The red line depicts the trajectory of the defender, whereas the blue one, that of the SV.
Figure 6a shows the evolution of the
y-component of the SV’s velocity according to Markov jump-like process
.
Figure 6b shows the trajectories of the vehicles for the diffusion approximation
of the process
. In
Figure 6a, the black ellipse depicts the circular detection zone of radius
R, which looks ellipsoidal due to the different scale of the
and
axes. In the case of the discrete model, the parameter
is equal to
. In the case of the continuous model, the calculation of the defender’s optimal control is performed in time with the SV’s information updating, i.e., almost continuously (
equals the simulation discretization step).
For the estimation of time
, Equation (
36) was used. According to (
36), interception time
, which means
, i.e.,
, so
can be found from Equations (
31), (
33), and (
36). One can see in
Figure 6 that the trajectories of the defender for the discrete and continuous models of the SV’s movement were quite close. The difference of the trajectories in the final sections was due to the significant duration of the interval
between the updates of the information about the SV and, thereby, the corrections of the defender’s program control in the discrete approach.
As one can see, the problem of interception was solved successfully, as the defender moving from the initial position with the found u control finally occurred in the close vicinity of the SV.
6.2. Destruction of the SV
The second application is the task of the destruction of the SV using the defender. To complete this task, the defender must come close enough to the SV. In the normalized scale:
Let
. Therefore:
In the coordinate system associated with the initial position of the SV, the initial coordinates of the defender are in the normalized scale. The velocity of the defender was chosen as . As the target moves parallel to the general course of the SV, then the detection probability equals ; thus, using the defender is justified.
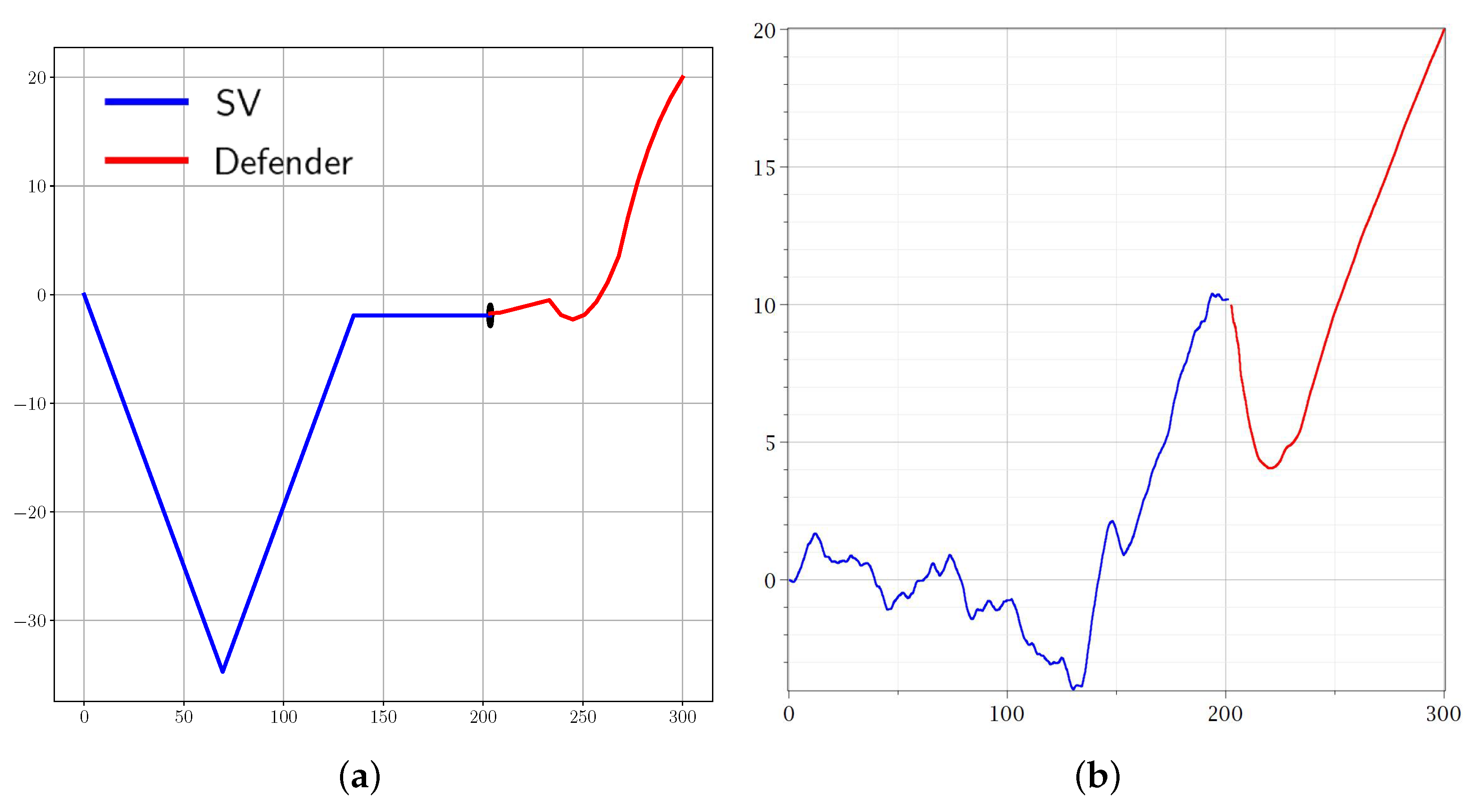
The results of the modeling are presented in
Figure 7. As in the first example,
Figure 7a corresponds to the discrete approach to the simulation and the process
, and
Figure 7b relates to the continuous approach and the process
.
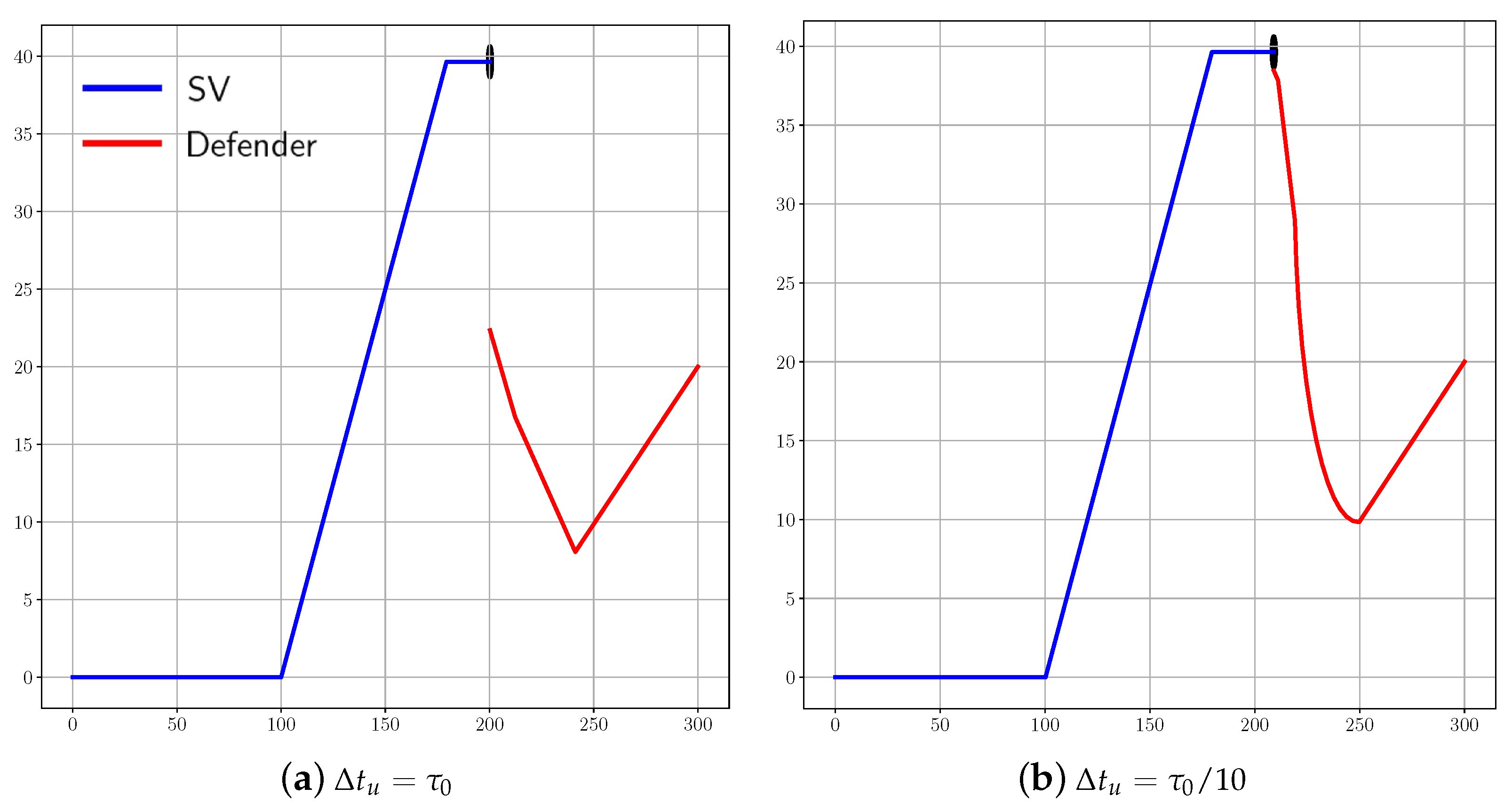
The accuracy of the interception of the SV by the defender or the so-called terminal miss obviously depends on the parameter
—the time interval between corrections of the defender’s control.
Figure 8 presents the results of different simulations of the interception of the SV by the defender for the discrete approach.
Figure 8a corresponds to the case of
. A sufficient miss of the defender can be explained by the relatively significant duration
of its movement without control correction and the “inconvenient” realization of the tack, which combined with the velocity advantage (
) allowed the SV to avoid interception by the defender. However, decreasing the parameter
helped achieve more satisfactory results, as shown in
Figure 8b. For two similar realizations of process
(blue lines), the trajectories of the controlled defender (red lines) were clearly very different with dependence on the parameter
(
and
, respectively).
6.3. Comparison with Classic Guidance Methods
The optimal control law of the defender obtained here was compared with classic guidance methods, mentioned in the Introduction, such as the pursuit guidance method and parallel guidance, which is a specific case of the proportional navigation guidance method. On average, our method gave better results than the others. In
Figure 9, a typical realization of different simulated guidance methods is presented. The orange line designates the trajectory of the defender, acting according to the pursuit guidance method; the red line denotes the trajectory generated by the parallel guidance algorithm; the blue graph shows the SV’s movement. The defender, controlled according to Equations (
31), (
33) and (
36), has a green trajectory. Dashed lines illustrate the distances on the
Y axis between the SV and defender at instant
when their
X-coordinates coincide.
As one can see, the green defender was closer to the SV than the others. Classic guidance methods are effective when the pursuer velocity is higher than the one of the evader. That is not the case in the current study, because the defender’s velocity was less than the velocity of the SV. Moreover, the classic guidance methods are not intended to be use for intercepting stochastic targets, unlike the control law obtained in this article as a solution of the stochastic optimal control problem.
7. Conclusions
The article considered one “attacker–target–defender”-type problem of the interaction on a plane between the search system, consisting of one search vehicle with the circle detection zone, and the mobile searched object. The search vehicle tacked randomly along a given general course towards the searched object, and its movement was described using a Markov jump-like process. The searched object had a mobile defender onboard, which can be used for the distraction and destruction of the search vehicle, if it presents a danger to the searched object in the sense of its detection. The feature of this problem is that the defender has lower dynamic capabilities in comparison to the searching vehicle being intercepted.
It was shown that, being stochastic in nature, the optimal control problem of the interception of a search vehicle can be transformed into the classic deterministic problem of optimal control in the class of piecewise-programmatic controls. The optimal time of interception was estimated, and an optimal control law was found. The examples of the numerical simulations for both the discrete and continuous (stochastic and deterministic) problems were presented to reveal the efficiency of the designed results. Furthermore, a comparison with the interception solutions, based on classic guidance laws, was presented.
In the future, it is planned to consider a similar problem statement with a group of search vehicles instead of one.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}