1. Introduction
Arc-length parametrization can be considered to be the most natural of all possible parametrizations of a given curve [
1]. This parametrization is very useful and has several useful mathematical properties. Unfortunately, there is a limited set of curves for which the arc-length parametrization can be expressed as an elementary function. It is proved in [
2] that, on par with polynomials, it is possible to select a subclass of arc-length curves that has an arbitrary number of degrees of freedom.
These curves are useful in engineering applications, especially for the analysis of beam-like structures. If induced beam theories are employed for the analysis of these systems, a three-dimensional beam continuum is reduced to an arbitrary curved line [
3]. Under specific kinematic restrictions, a classical mechanical model of a planar curved Bernoulli–Euler beam emerges. The linear static equations of this beam model are considered in reference [
4] with respect to an arbitrary parametric coordinate.
The beam equations rarely have an analytical solution. Therefore, it is of a particular interest to examine arc-length curves for which the governing equations of Bernoulli–Euler beam are significantly simplified, and analytical solutions are feasible. These solutions can provide valuable benchmark test results for the application of modern numerical methods to the analysis of free-form beams [
5,
6].
Special polynomials and functions are the subject of many books and papers and have many applications [
7,
8], especially in physics where they are used for solving differential equations [
9]. The two main objectives of this paper are: (i) construction of one class of plane curves that has arc-length parametrization (
Section 3 and
Section 4), and (ii) application of the introduced curves in computational mechanics and numerical analysis (
Section 5). In
Section 3 special functions,
,
, are constructed using polynomials
,
, which are called special polynomials. It is proved that special polynomials
,
,
, are solutions of the Sturm–Liouville differential equation [
10]
while special functions
,
,
, are solutions of the Sturm–Liouville differential equation [
11]
and they form the basis of an
space [
12], with respect to the weight function
. In
Section 4, using the special functions
, plane curves with arc-length parametrization are constructed and some features of these curves are proved. Linear static analysis of one planar curved beam is reported in
Section 5.
4. Arc-Length Parametrization Using Special Functions
In this section, plane curves with arc-length parametrization are constructed using the new class of special functions
. We consider a smooth curve of the form
where
,
. For
The necessary and sufficient condition for the arc-length parametrization form in this case is guaranteed by
,
. Arc-length parametrized curves can be constructed by integration, i.e.,
For
, functions
and
,
, are rational. Therefore, it is easy to show, using the standard procedure of integral calculus, that these integrals are elementary functions. Additionally, for
integrals in (
28) are elementary functions. The curvature of the curve (
28) is determined by
and the radius of the curvature is
Since integrals in (
28) can be calculated analytically when
,
, these cases are particularly interesting.
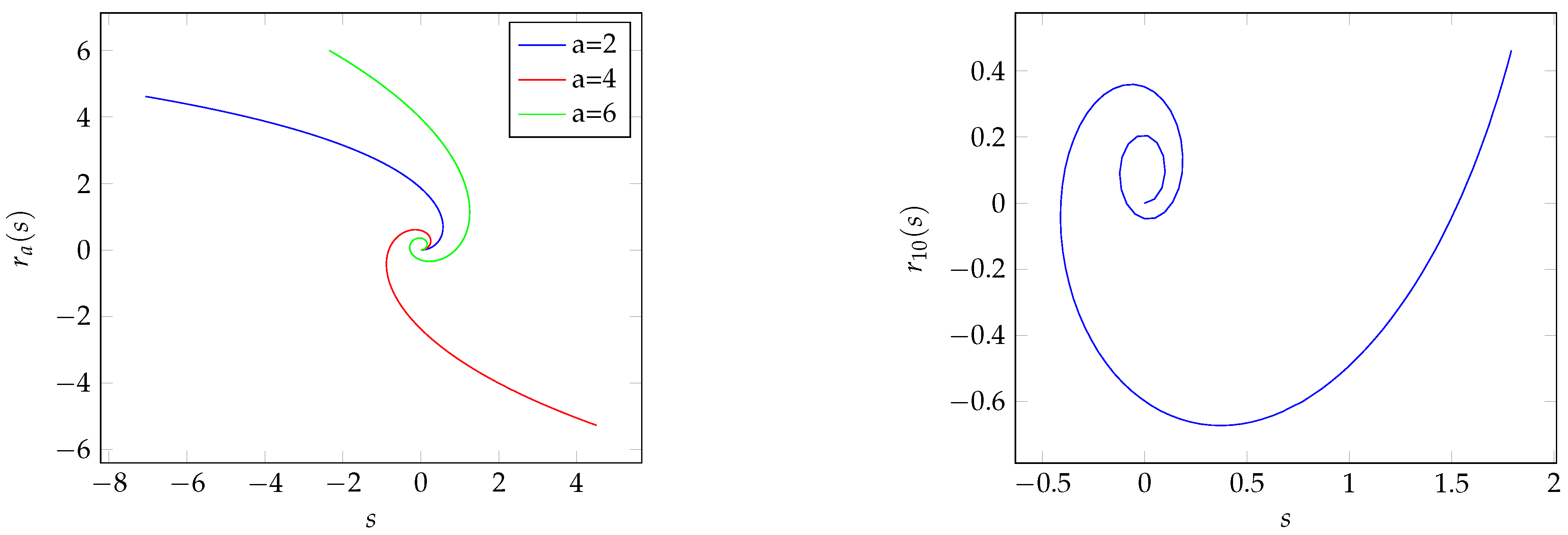
Example 1. For the curveis assigned to the function Figure 1 shows curves
and
,
.
Proposition 2. For , , , , the curve (28) can be represented as a function which reaches extreme values for . Proof. The direction of the tangent of the curve represented by (
28) is
This direction is defined if
, i.e.,
,
,
. The stationary points can be calculated from
so we have
. One can easily prove that these stationary points are extreme values of the function
. □
Remark 1. Notice that extreme values are zeros of the polynomials , .
From Proposition 2 it holds that
,
,
,
, are solutions of the following equation
This means that for
,
,
,
, the tangent of the curve (
28) is parallel to the
axis.
Proposition 3. The Taylor series of the curve (28) considered as a function in a neighborhood of its extreme value is Proof. Using formula:
we obtain the required result. □
Remark 2. Notice that the curve (28) has the Taylor series in a neighborhood of an arbitrary point . For the sake of simplicity, let us consider only the case when , since the Taylor series is then even function. Example 2. If , the curve (28) can be expanded into a Maclaurin series of the form 5. An Application to the Linear Static Analysis of Curved Beams
Let us consider one application of the arc-length parametrized curves we have introduced. In this example, we deal with the linear static analysis of curved beams, as discussed in [
4]. For a general 3D case and an arbitrary parametric coordinate, beam equations are the set of four linear first order differential equations:
force equations: ;
moment equations: ;
rotation equations: ;
displacement equations: ,
where is the covariant derivative of a kth component of a vector with respect to the parametric coordinate ; and are the components of the section force, section couple, infinitesimal rotation, and displacement, respectively; g is the component of the metric tensor which is equal to its determinant; and are the components of distributed load and moment, respectively; are the curvature changes, while are the initial curvatures of beam axis; is the axial strain of beam axis while is the permutation symbol.
It is shown in [
4] that the solutions of the beam equations are:
where
and
are the components of the base and reciprocal base vectors of the beam axis, respectively.
represents a coordinate of some fixed beam section, while an asterisk denotes quantities measured with respect to the global Cartesian coordinate system. That is,
. Standard summation convention is applied, and indices take values of 1, 2, and 3.
These equations have an analytical solution in only a few, special cases, primarily due to the fact that the square of the determinant of the metric tensor, which equals Jacobian, is a function. Arc-length parametrization simplifies these equations significantly since , and the basis and its dual counterpart become the same. Furthermore, for the in-plane beam the following is valid: , and , and .
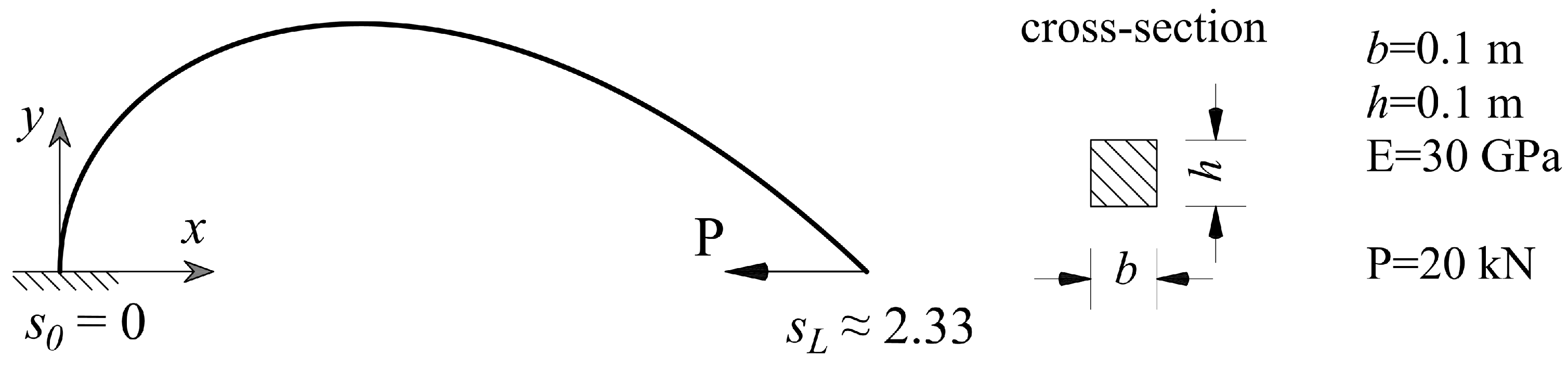
Let us consider a beam as in
Figure 2. The beam axis is described with:
where
is the solution of the equation
(
). The other geometric and material characteristics of the beam are displayed in
Figure 2. To simplify the example, the beam is clamped at one,
, and free at the other,
, end. This results with the homogeneous kinematic boundary conditions for
, i.e.:
. Furthermore, the beam is statically determinate, and the force boundary conditions are simply calculated as:
The beam equations for this example reduce to:
where
is the partial derivative with respect to the arc-length coordinate
s. Now, it is straightforward to calculate section forces and section couple, since
. However, rotation and displacement must be calculated by integration.
The base vectors, the tangent and the normal, are:
which gives section forces and section couple as:
Using the simplest constitutive relation [
4], the axial strain and the curvature change of the beam axis are:
When comparing our results with those obtained with the finite element of a straight beam, it is reasonable to exclude the term
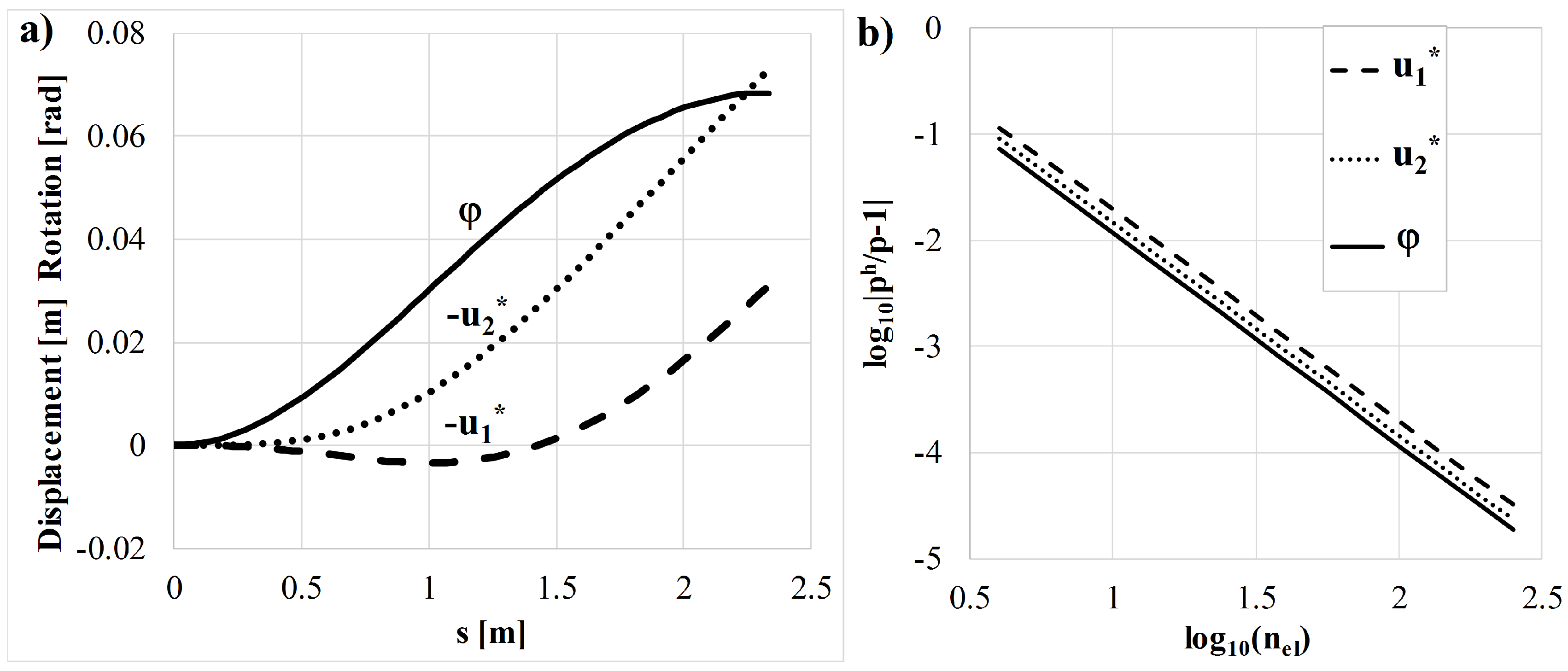
since it is specific for curved beams. Now, the rotation is calculated as:
while the global displacement components are:
where
The obtained functions of rotation and displacement are shown in
Figure 3a. Furthermore, the beam is analyzed with the standard 2-node finite element which employs cubic Hermite polynomials for transverse, and linear polynomials for axial displacements [
15]. Kinematic quantities at the point of force application are calculated with different meshes of these elements and the convergences with respect to the calculated analytical results are shown in
Figure 3b. Evidently, highly accurate numerical results for this example require dense meshes of finite elements.


{kind=link}
{kind=link}
{kind=link}