
Lithium-Ion Battery SOC Estimation Based on Adaptive Forgetting Factor Least Squares Online Identification and Unscented Kalman Filter


Abstract
:1. Introduction
2. Establishment of Equivalent Circuit and Open Circuit Voltage Model
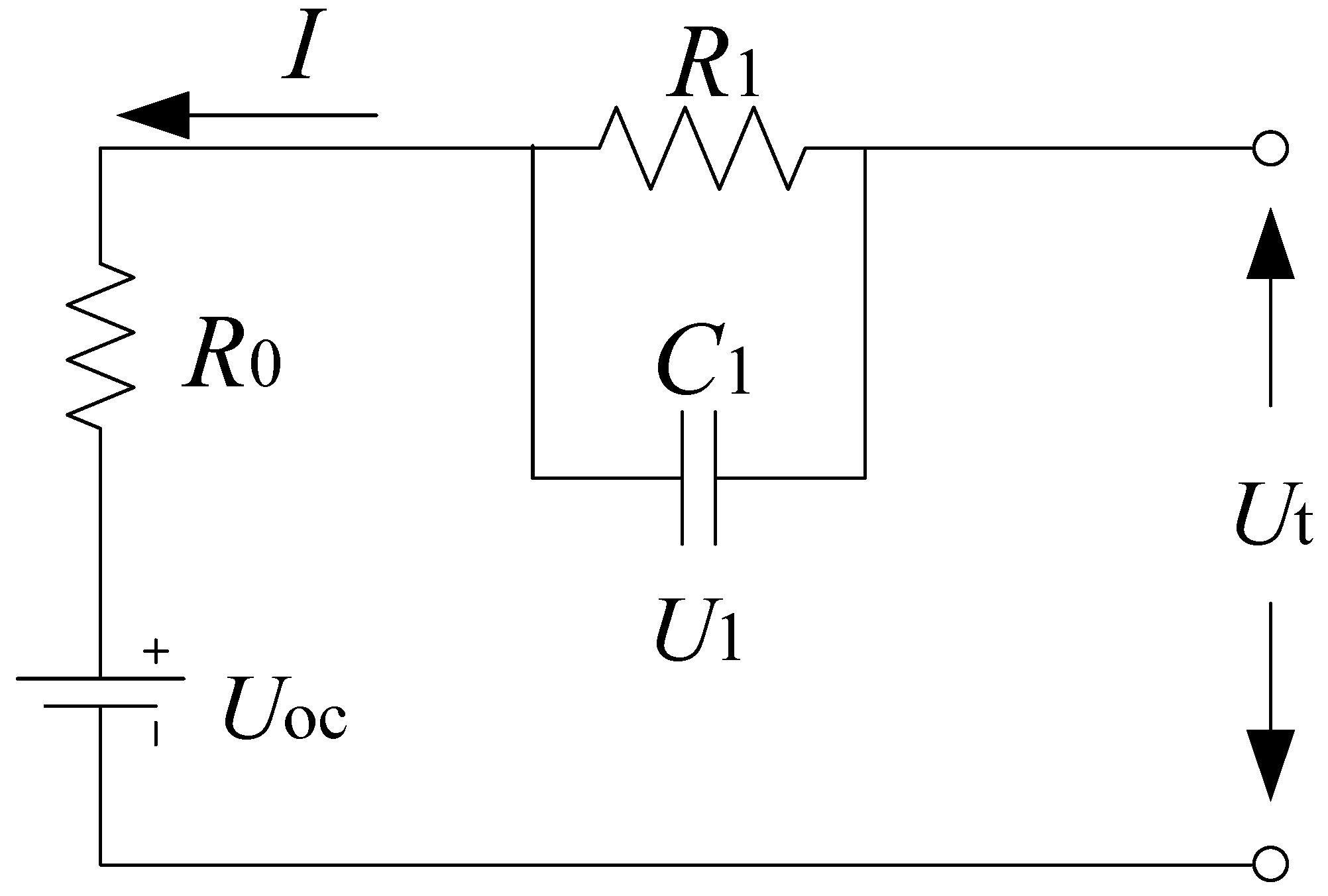
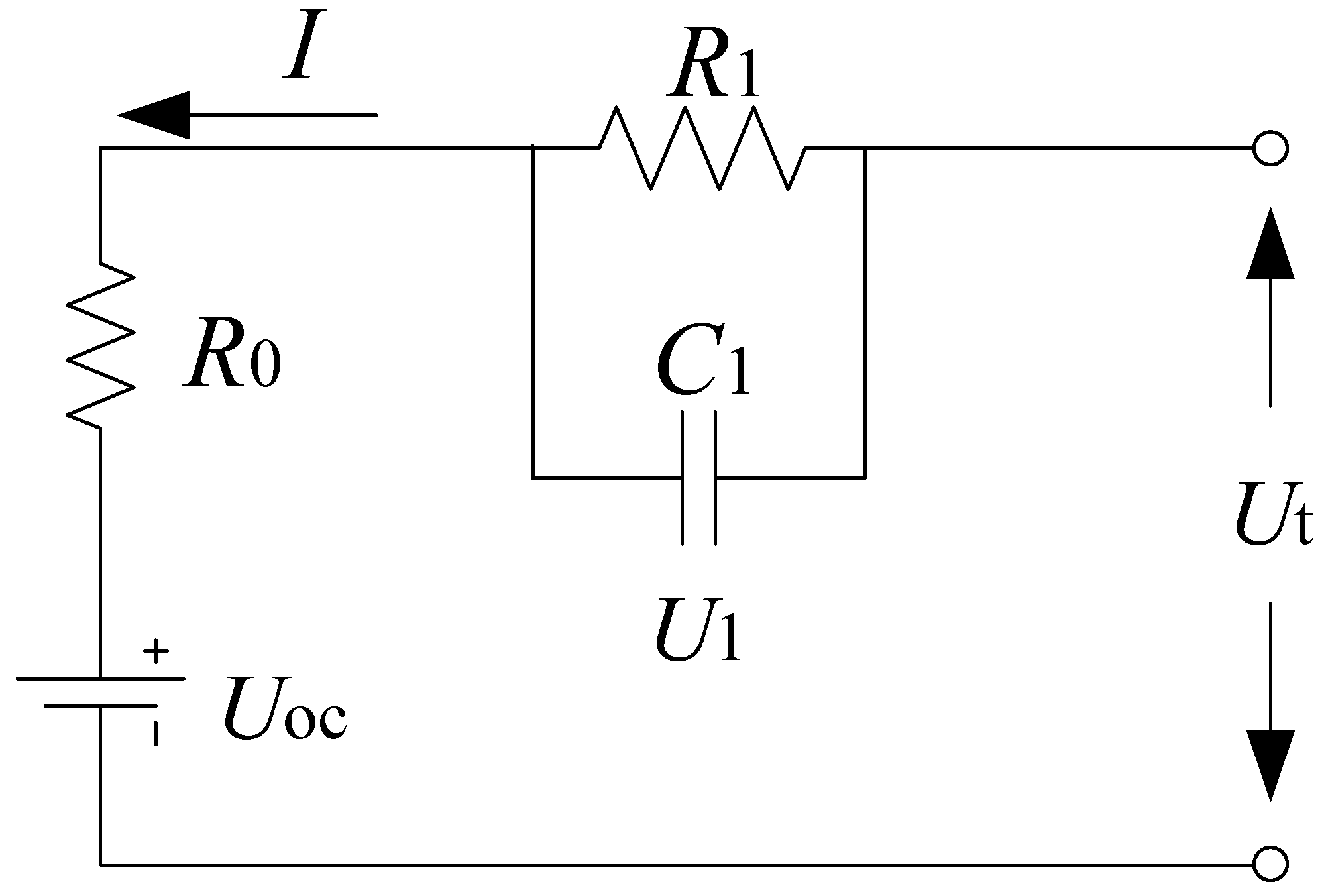
2.1. Equivalent Circuit Model
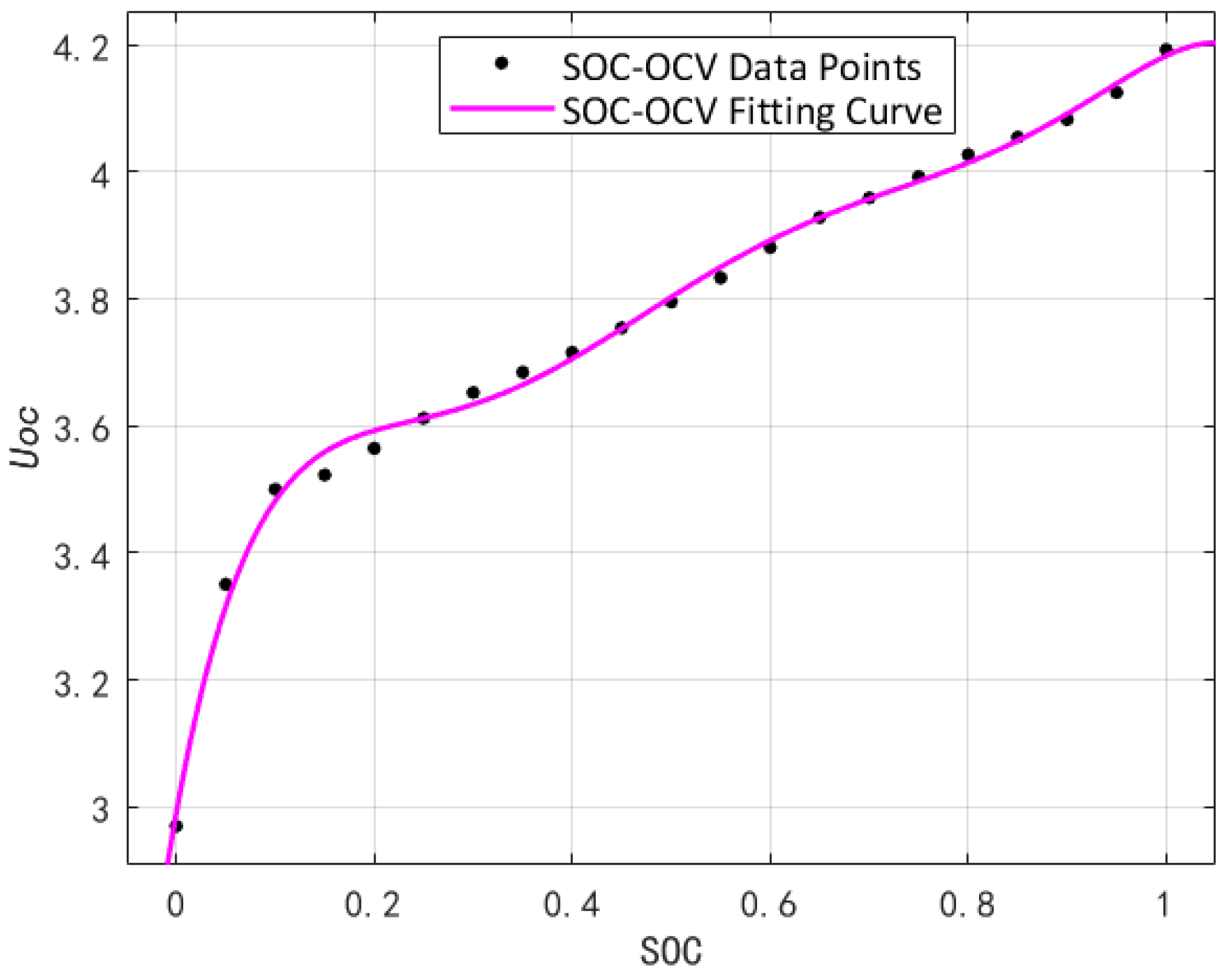
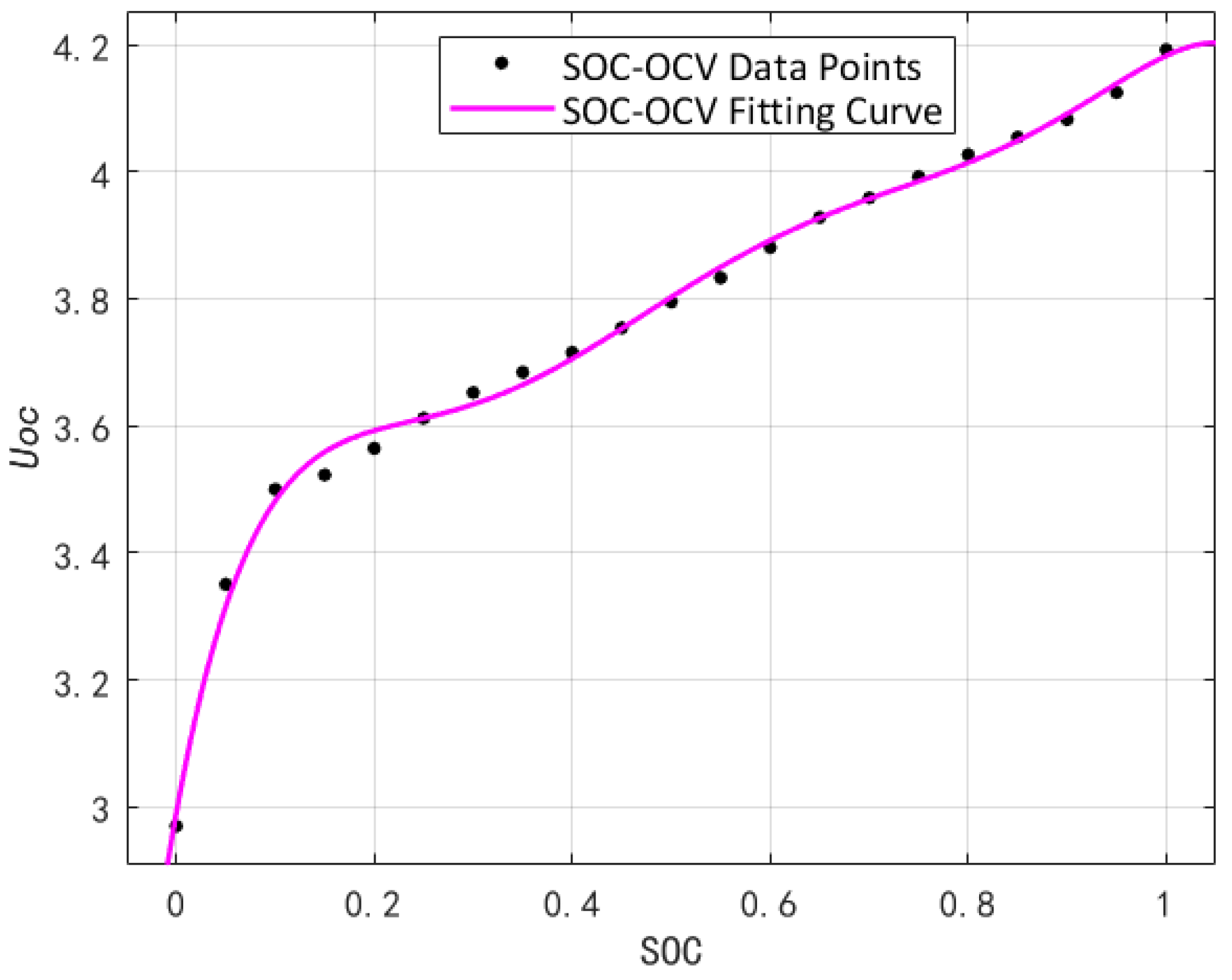
2.2. Open Circuit Voltage Model
- The temperature control box controls the test environment temperature at 25 °C. After charging with a constant current at a rate of 1/3 C to a cut-off voltage of 4.2 V, charging at a constant voltage until the current is less than 0.02 C, and then standing for 1 h. It is considered fully charged at this time, SOC = 100%;
- Discharge 5% of the battery capacity at a rate of 1/3 C, and record the terminal voltage value at this moment after standing for 1 h;
- Repeat the previous step operation 20 times, that is, discharge the battery to SOC = 0.
3. Model Parameter Online Identification
3.1. Forgetting Factor Recursive Least Squares
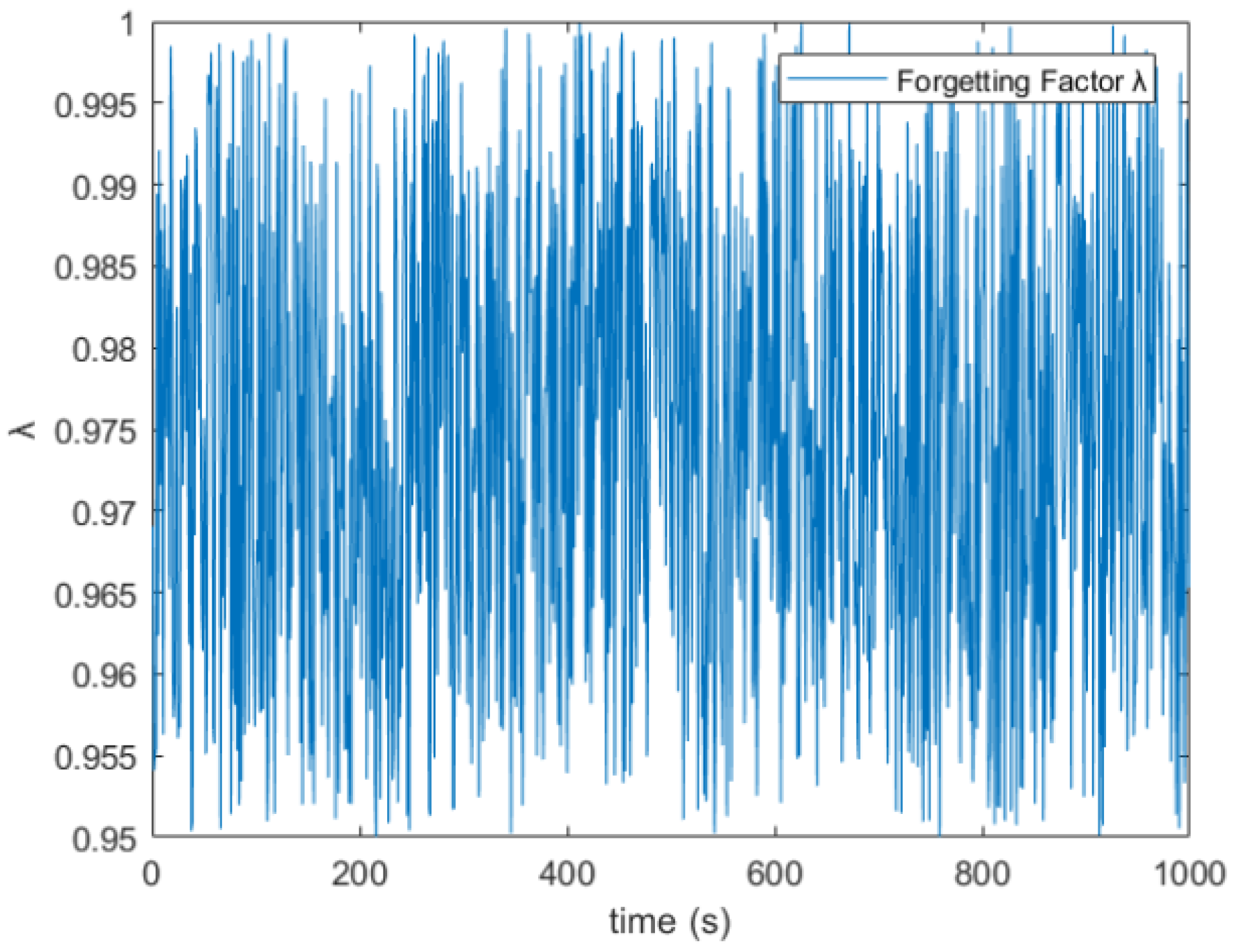
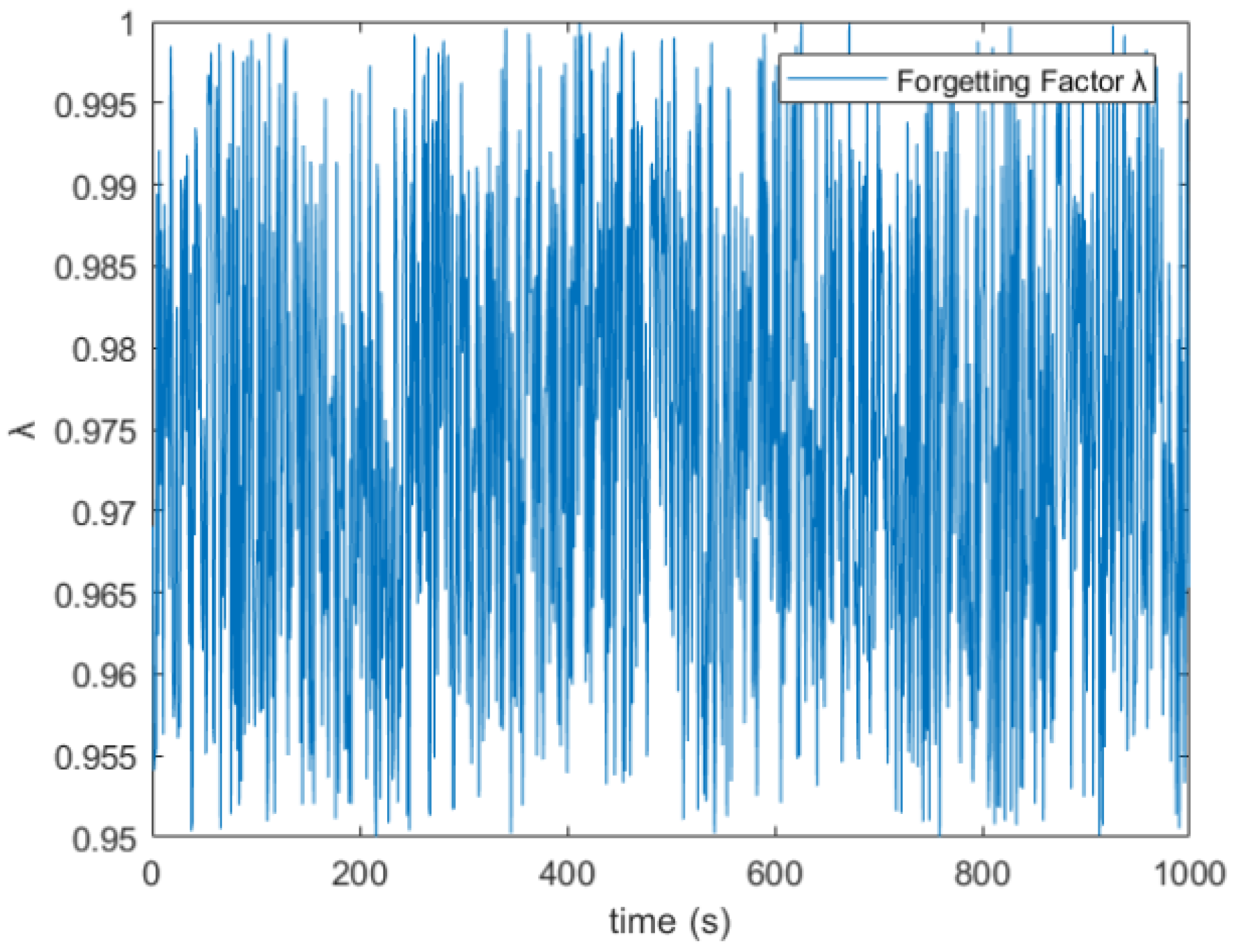
3.2. Simulated Annealing Algorithm Optimizes Forgetting Factor
4. Joint Estimation of Battery SOC
4.1. Principle of Battery SOC Estimation Based on UKF
- Suppose the system state equation discretized from Section 3.1 is:
- 2.
- Initialization of state variables and covariance P:
- 3.
- Update state one-step predicted value and covariance:
- 4.
- Observation and Sigma point set observations mean prediction:
- 5.
- Observation covariance update:
- 6.
- Calculate Kalman gain:
- 7.
- State matrix and covariance measurement update:
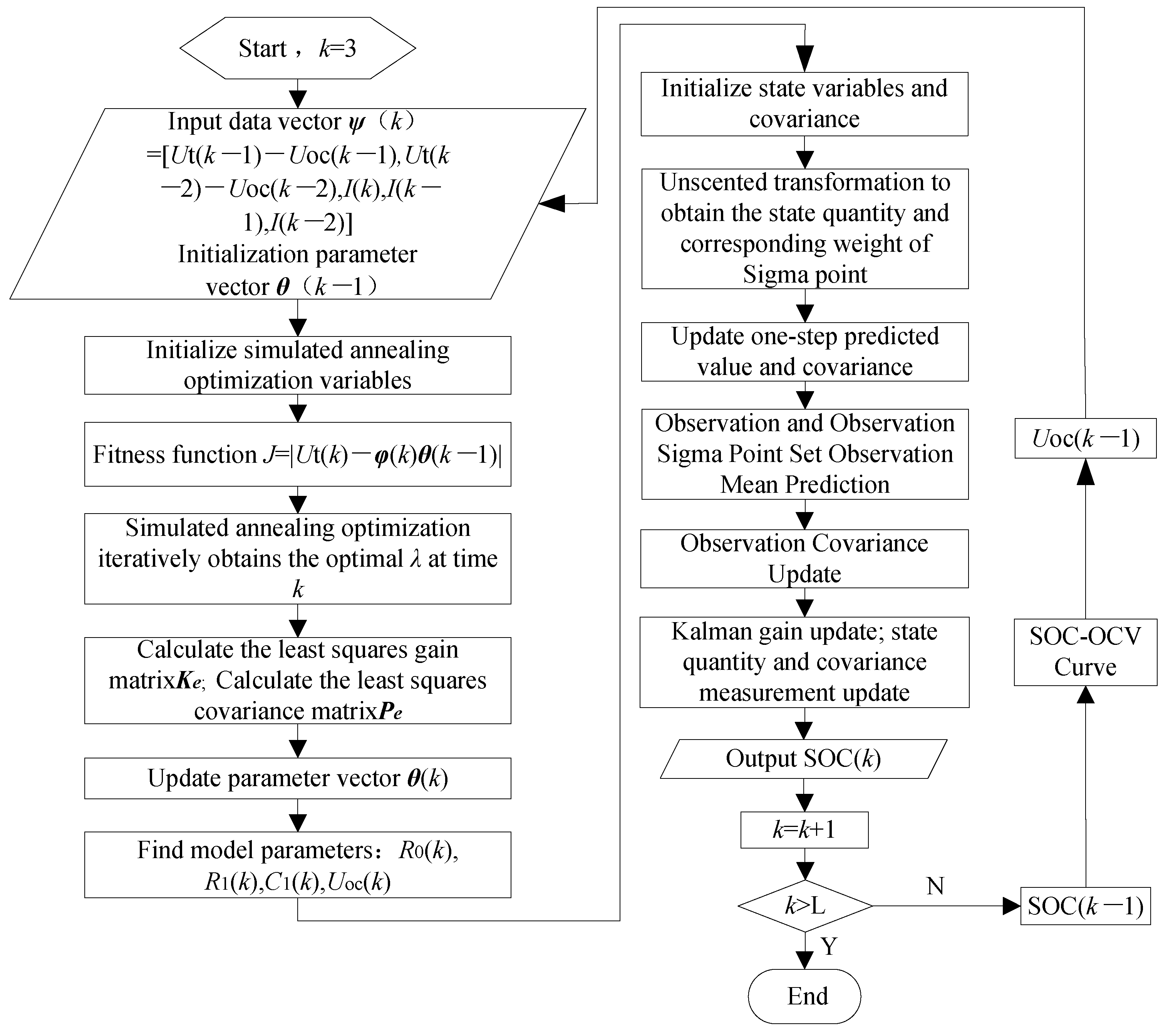
4.2. SA-FFRLS Combined with UKF to Estimate SOC
5. Algorithm Verification
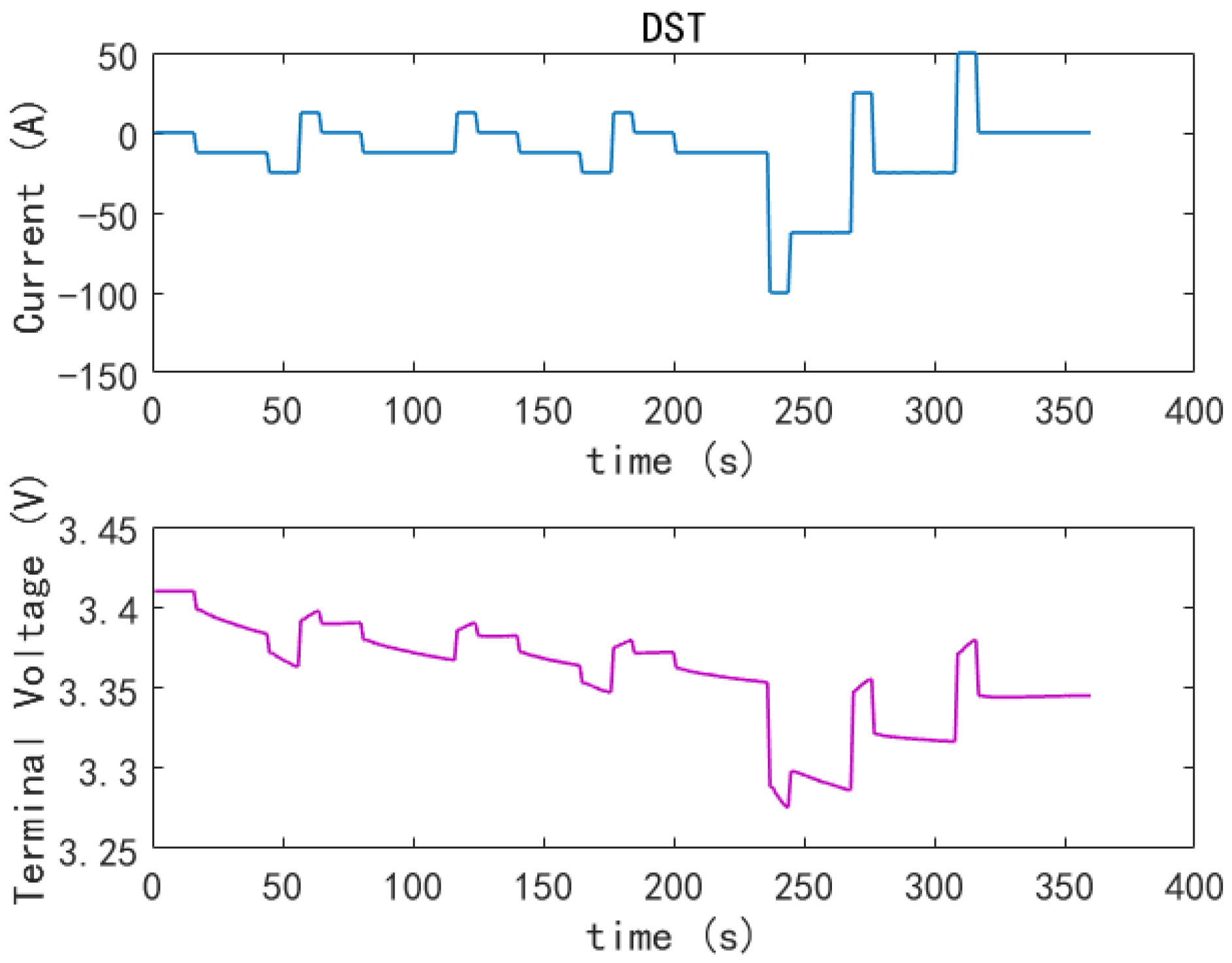
5.1. Introduction to Test and Simulation
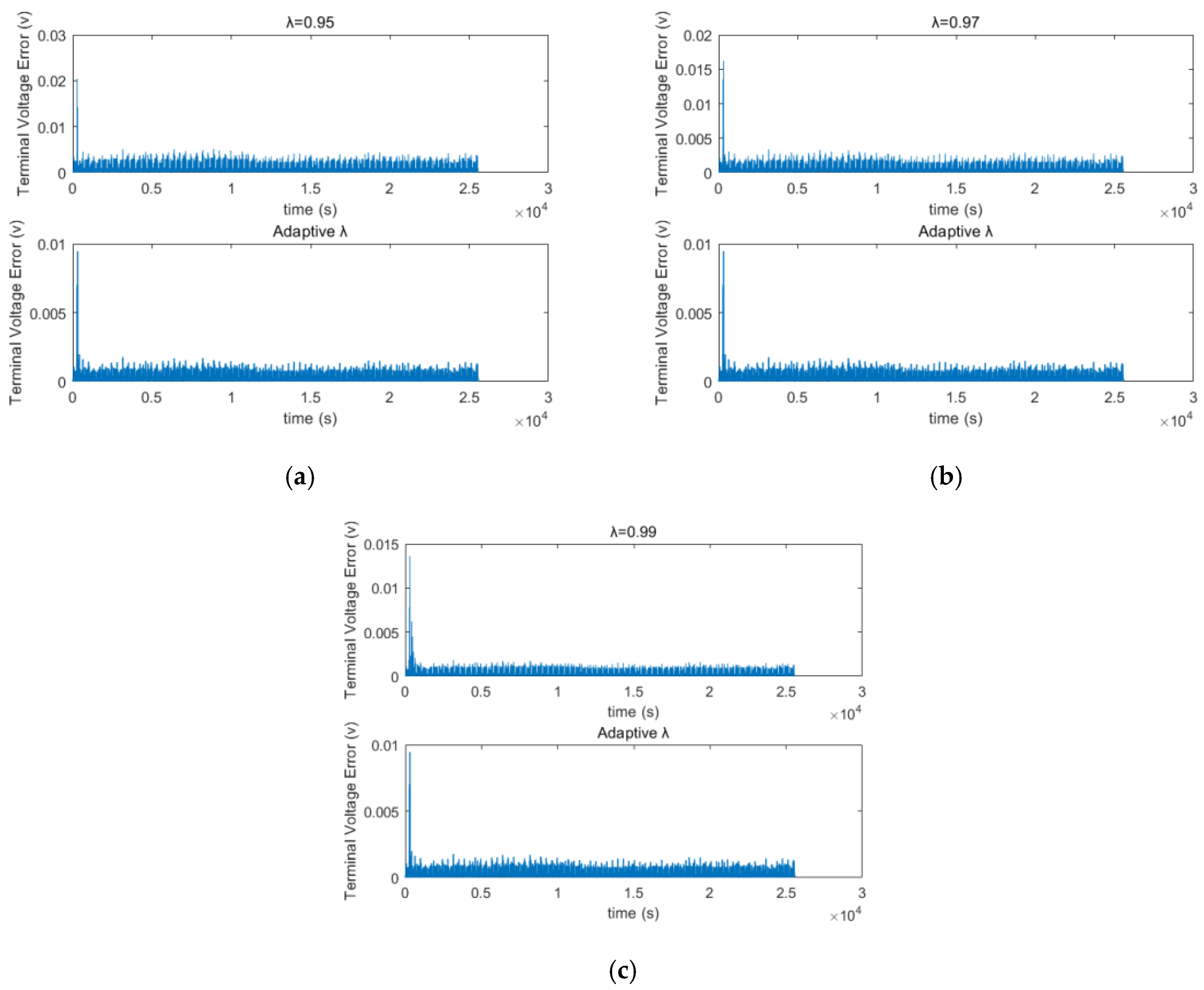
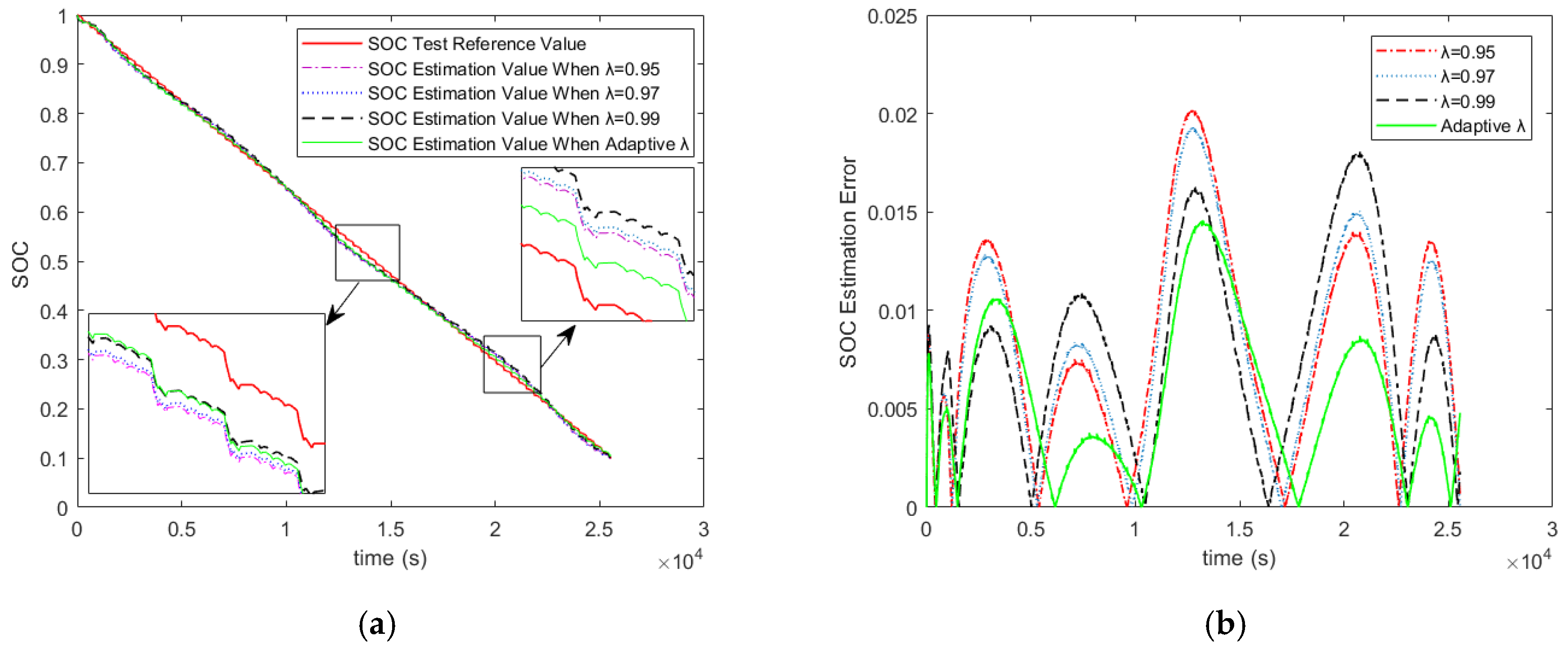
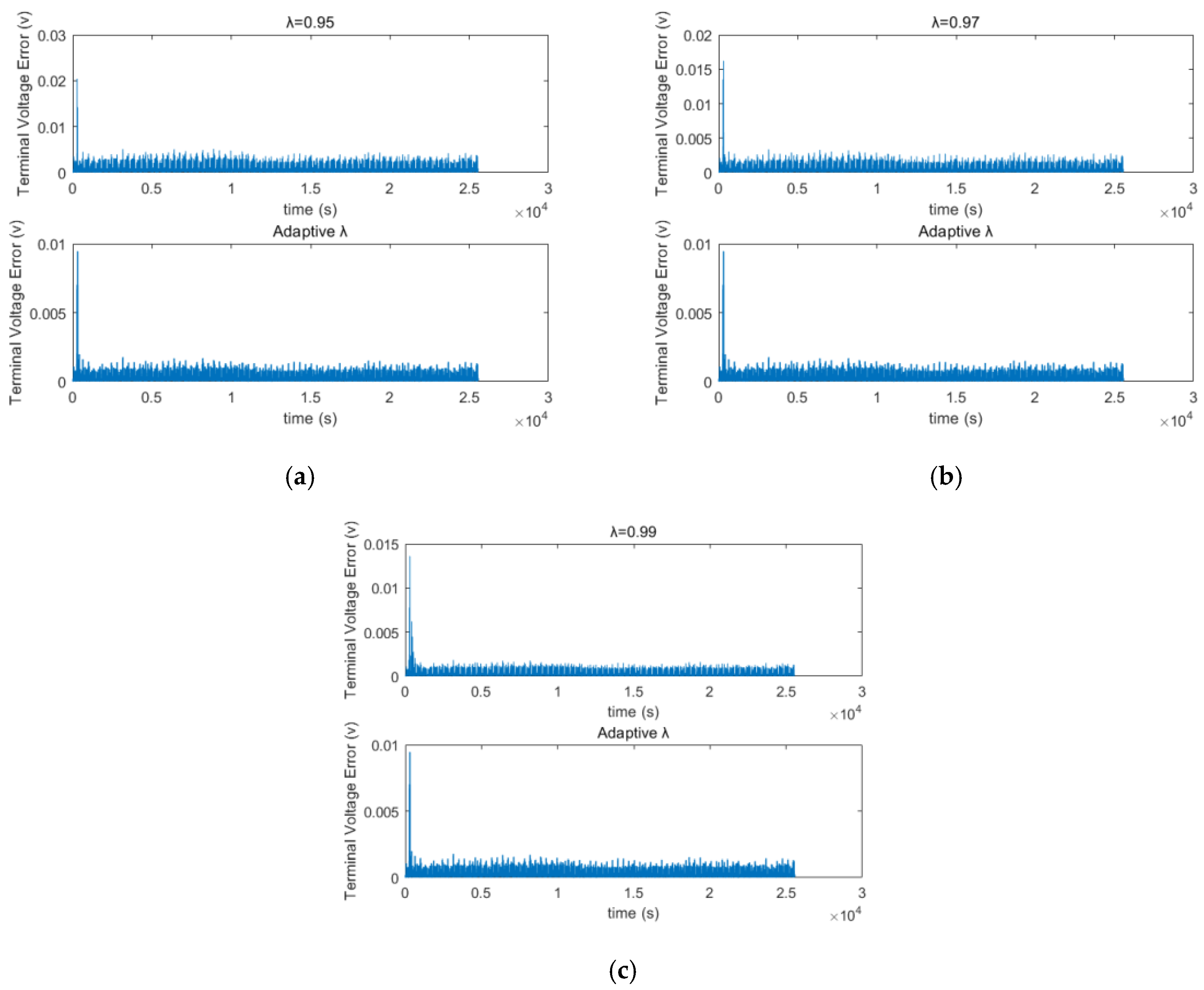
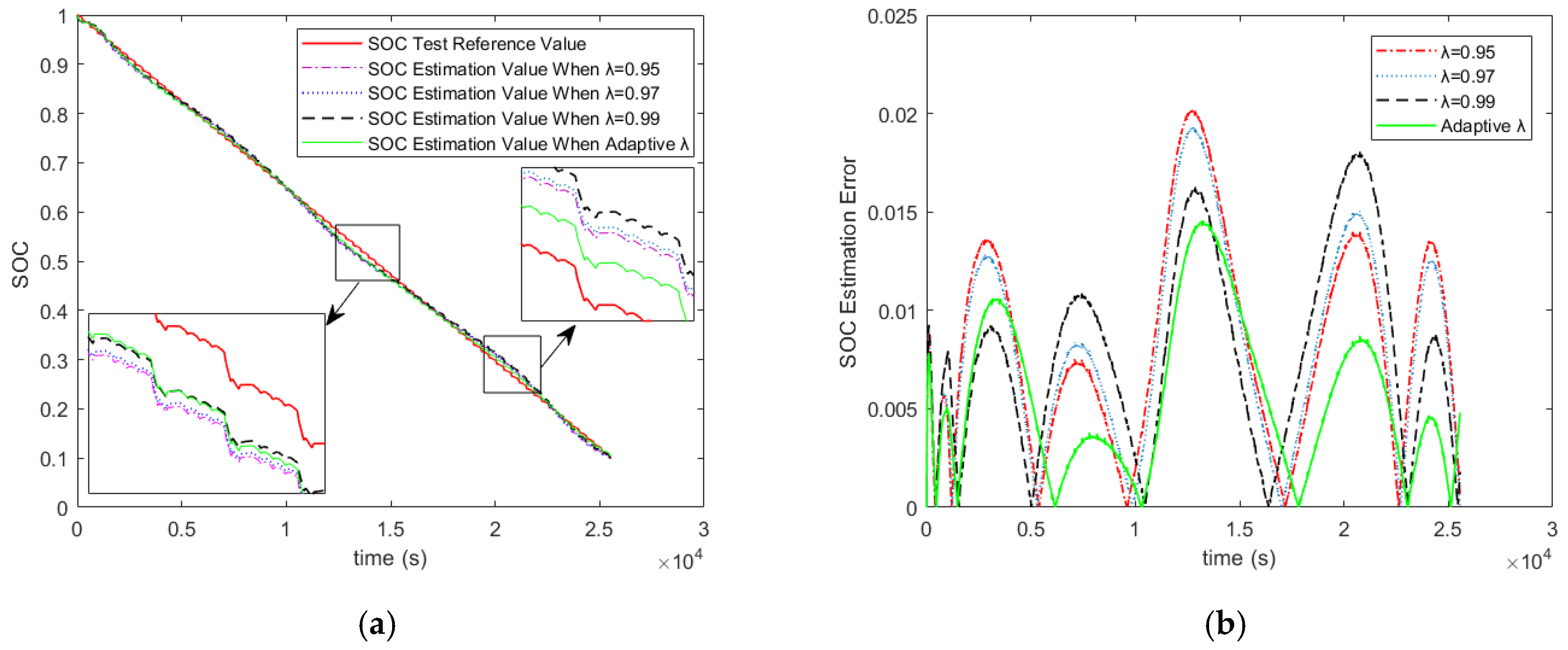
5.2. Comparison of Simulation Results
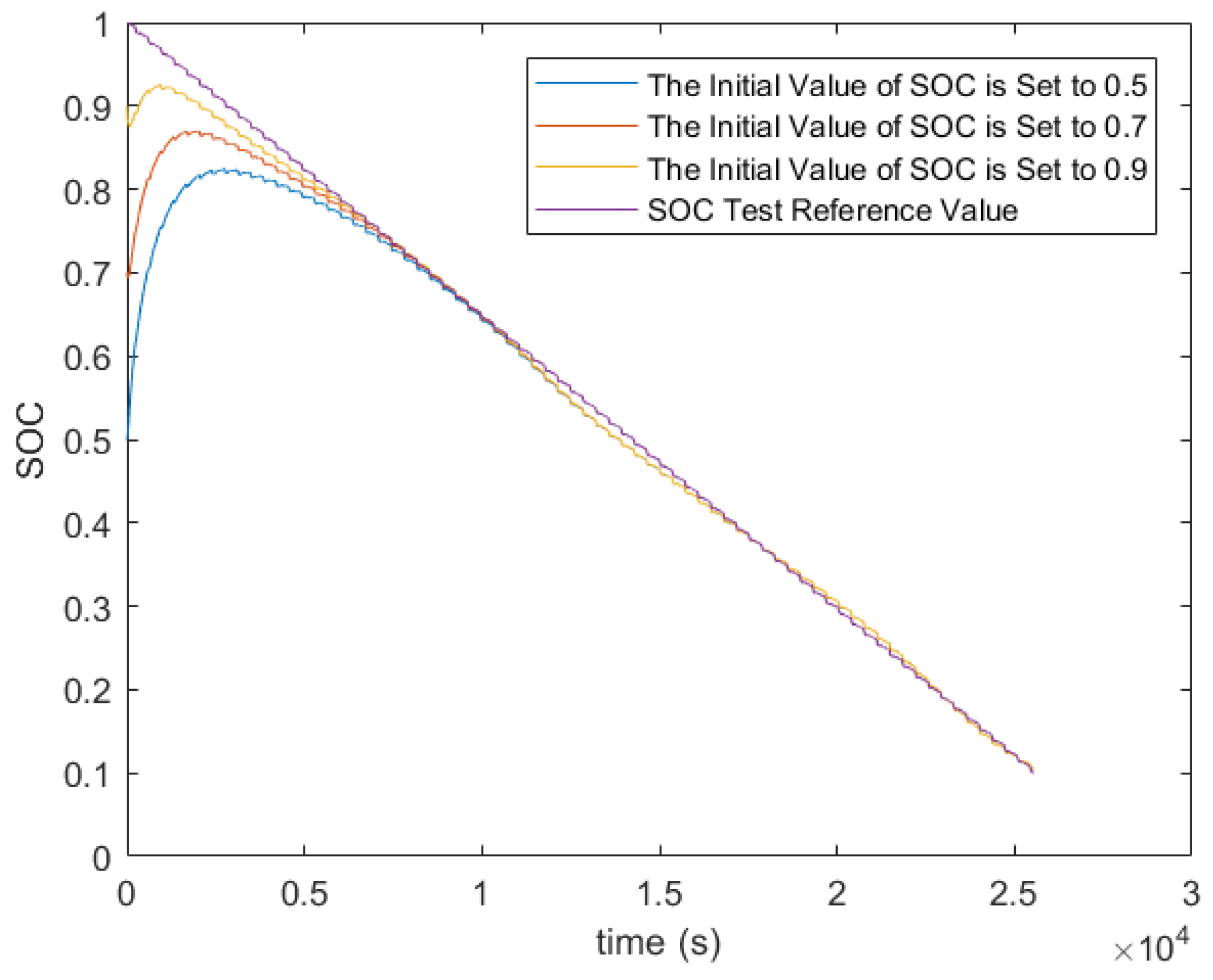
5.3. Algorithm Robustness Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, J.W.; Xiong, J.; Shu, X.; Li, G.; Zhang, Y.J.; Chen, Z.; Liu, Y.G. State of charge estimation framework for lithium-ion batteries based on square root cubature Kalman filter under wide operation temperature range. Int. J. Energy Res. 2020, 45, 5586–5601. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Evaluation on State of Charge Estimation of Batteries with Adaptive Extended Kalman Filter by Experiment Approach. IEEE Trans. Veh. Technol. 2012, 62, 108–117. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Liu, X.; Liu, Z. Model-based state of charge and peak power capability joint estimation of lithium-ion battery in plug-in hybrid electric vehicles. J. Power Sources 2013, 229, 159–169. [Google Scholar] [CrossRef]
- Lee, J.; Nam, O.; Cho, B. Li-ion battery SOC estimation method based on the reduced order extended Kalman filtering. J. Power Sources 2007, 174, 9–15. [Google Scholar] [CrossRef]
- Ye, M.; Guo, H.; Cao, B. A model-based adaptive state of charge estimator for a lithium-ion battery using an improved adaptive particle filter. Appl. Energy 2017, 190, 740–748. [Google Scholar] [CrossRef]
- Luo, Y.; Qi, P.W.; Kan, Y.Z. Parameter Identification of Lithium Battery Model Based on Simulated Annealing Algorithm. Automot. Eng. 2018, 40, 1418–1425. [Google Scholar]
- Wang, W.L.; He, F.; Zheng, Y.L. Estimation of Lithium Battery SOC Based on RLS-EKF Joint Algorithm. Power Technol. 2020, 44, 1498–1501. [Google Scholar]
- Partovibbakhsh, M.; Liu, G. An Adaptive Unscented Kalman Filtering Approach for Online Estimation of Model Parameters and State of Charge of Lithium-Ion Batteries for Autonomous Mobile Robots. IEEE Trans. Control Syst. Technol. 2015, 23, 357–363. [Google Scholar] [CrossRef]
- Pang, Z.H.; Cui, H. System Identification and Adaptive Control MATLAB Simulation, 1st ed.; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2013; pp. 30–45. [Google Scholar]
- Zheng, L.D.; Dong, J.Y.; Ma, Q. SOC Estimation of Lithium Battery Based on Parameter Identification and AEKF. Power Technol. 2020, 44, 1502–1505. [Google Scholar]
- Xu, J.L.; Ma, G.Q. Research on Online Lithium-ion Battery SOC Estimation Based on UKF. Power Technol. 2019, 43, 1615–1618. [Google Scholar]
- Ouyang, T.; Xu, P.; Chen, J.; Lu, J.; Chen, N. An Online Prediction of Capacity and Remaining Useful Life of Lithium-Ion Batteries Based on Simultaneous Input and State Estimation Algorithm. IEEE Trans. Power Electron. 2020, 36, 8102–8113. [Google Scholar] [CrossRef]
- Xie, Y.; Zheng, J.; Li, W.; Lee, K.; Zhang, Y.; Liu, J.; Dan, D.; Wu, C.; Wang, P. An improved electrothermal-coupled model for the temperature estimation of an air-cooled battery pack. Int. J. Energy Res. 2019, 44, 2037–2060. [Google Scholar] [CrossRef]
- Tan, F.M.; Wang, Q. Power Battery SOC Estimation Model Based on Improved Unscented Kalman Filter Algorithm. Automot. Technol. 2019, 3, 18–24. [Google Scholar]
- Muhammad, S.; Rafique, M.U.; Li, S.; Shao, Z.; Wang, Q.; Guan, N. A Robust Algorithm for State-of-Charge Estimation with Gain Optimization. IEEE Trans. Ind. Inform. 2017, 13, 2983–2994. [Google Scholar] [CrossRef]
- Hu, Y. Iterative and recursive least squares estimation algorithms for moving average systems. Simul. Model. Pract. Theory 2013, 34, 12–19. [Google Scholar] [CrossRef]
- Han, Y.Y. Estimation of State of Charge of Lithium Battery Based on Improved Kalman Filter Algorithm. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2020. [Google Scholar]
- Yang, N.; Zhang, X.; Li, G. State-of-charge estimation for lithium ion batteries via the simulation of lithium distribution in the electrode particles. J. Power Sources 2014, 272, 68–78. [Google Scholar] [CrossRef]
- Liu, Y.L.; Dai, S.; Cheng, Z. Lithium-ion Battery SOC Estimation Based on Finite Difference Extended Kalman Filter. J. Electrotech. Technol. 2014, 29, 221–228. [Google Scholar]
- Duan, J.; Wang, P.; Ma, W.; Qiu, X.; Tian, X.; Fang, S. State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter. Energies 2020, 13, 4197. [Google Scholar] [CrossRef]
- Yu, P.; Wang, S.L.; Yu, C.M. Lithium Battery SOC Estimation Based on Adaptive Fractional-Order Extended Kalman. Energy Storage Sci. Technol. 2021, 10, 335–341. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | a1 | a2 | a3 | a4 | a5 | a6 | a7 |
|---|---|---|---|---|---|---|---|
| Value | −43.56 | 155.4 | −215.7 | 146.6 | −50.16 | 8.674 | 2.991 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zheng, Y.; Yu, Y. Lithium-Ion Battery SOC Estimation Based on Adaptive Forgetting Factor Least Squares Online Identification and Unscented Kalman Filter. Mathematics 2021, 9, 1733. https://doi.org/10.3390/math9151733
Wang H, Zheng Y, Yu Y. Lithium-Ion Battery SOC Estimation Based on Adaptive Forgetting Factor Least Squares Online Identification and Unscented Kalman Filter. Mathematics. 2021; 9(15):1733. https://doi.org/10.3390/math9151733
Chicago/Turabian StyleWang, Hao, Yanping Zheng, and Yang Yu. 2021. "Lithium-Ion Battery SOC Estimation Based on Adaptive Forgetting Factor Least Squares Online Identification and Unscented Kalman Filter" Mathematics 9, no. 15: 1733. https://doi.org/10.3390/math9151733
APA StyleWang, H., Zheng, Y., & Yu, Y. (2021). Lithium-Ion Battery SOC Estimation Based on Adaptive Forgetting Factor Least Squares Online Identification and Unscented Kalman Filter. Mathematics, 9(15), 1733. https://doi.org/10.3390/math9151733