1. Introduction
When, in the early 20th century, the Danish mathematician Agner Erlang used a mathematical model to describe a telephone switch (at the time, an office where workers manually connected phone lines), he became the founder of the field of queueing theory. More than a hundred years later, queueing theory is used in a broad range of practical problems such as in traffic engineering and industrial engineering, but telecommunications remains one of the main fields of application [
1,
2,
3].
Multiserver queueing models have received considerable attention in the past. Most papers, however, focus on the analysis of the queue length characteristics only. Results are available for queueing systems with a constant number of available servers [
4,
5,
6] as well as for queueing systems with a variable number of available servers [
7,
8,
9].
When it comes to delay analysis, multiserver queueing systems are notoriously hard to analyze, but some results do exist in the literature. In [
10,
11,
12], discrete-time queueing systems are treated where the number of available servers is constant, while in [
13], the number of available servers in a slot is a stochastic variable which is independent and identically distributed (i.i.d.) from slot to slot. In [
14], a continuous-time queueing system is treated where
N servers are subject to breakdowns and repair; the results are the distributions of the queue length and waiting times. The authors of [
15] obtain the queue length distribution and the delay distribution for a discrete-time model with general service demands and correlated service capacities. In their model, the service time of a customer depends on both its service demand and the service capacity.
In this paper, we consider a discrete-time multiserver queueing system that is special in the way that it allows correlation in both the slot-to-slot server availability and the arrival process. The buffer capacity is assumed to be infinite and the queueing discipline is First Come First Served (FCFS). In our earlier paper [
16], we handled the system content of such a queueing system, and now we focus on the analysis of the delay characteristics.
Table 1 compares the setting and delay results of the current paper to those of the relevant related papers indicated above.
The considered queueing system can be in two different system states. For every slot, a stochastic number of servers is available, and a stochastic number of new customers arrive. These are both i.i.d. within each state, but these distributions can be different for each state. The system resides for a stochastic number of slots in the same state before state transitions occur, which can only happen at slot boundaries. The sojourn times follow a distribution which is also dependent on the system state.
The above setup can be used to model a wide variety of queueing systems, such as queues with bursty arrivals (where long periods of low/no arrival intensity are alternated by short periods of high arrival intensity) and queues with cyclical service capacities (where alternately few and many servers are available for fixed period lengths).
The potential applications can be found in many fields. In [
17,
18], continuous time models are used to calculate the delay in a system with time-varying arrival intensity and service capacity. The envisaged application is a hospital emergency department, but the model can also be used in other applications. In [
19], time-dependent arrival rates are called a key feature of many real life service systems and it is, therefore, included in the Erlang loss model which is presented. In [
20], an overview of time-varying queueing models is presented, from a telecommunications point of view. A possible application of the method of this paper is a processor sharing system with speed scaling [
21], where the processing speed is adapted to the (expected) load. Another possible application is the domain of mobile ad hoc networks [
22]. In such networks, nodes (which can move freely) must cooperate to send and receive packages. The number of available nodes as well as the traffic varies over time.
The outline of the paper is as follows. In
Section 2, we give the mathematical outline of the queueing model. In
Section 3, we repeat some key results regarding the system content from our earlier paper [
16]. In
Section 4, we condition the delay of a customer on the state of the arrival slot and on the number of customers present in the queue at the moment of arrival.
Section 5 then describes how the delay of an arbitrary customer can be obtained. In
Section 6, we use the theory of the dominant singularity to obtain the tail characteristics of the delay. The numerical examples in
Section 7 illustrate the model and
Section 8 concludes the paper.
2. Queueing Model
We consider the discrete-time multiserver queueing model of [
16] with correlation over time in both the arrival process and the server availability. In this discrete-time model, the time horizon is divided into slots of equal length and, during a slot, the system can be either in state 1 or state 2. Note that, in general, in our paper, we will always use
i to indicate a system state and not repeat that it can only take values 1 and 2. Furthermore, we will use
to refer to the
other state:
Therefore, put simply, there are two types of slots, which we call state-1-slots and state-2-slots, and during a state-
i-slot the queueing system is in system state
i. State changes can only occur at slot boundaries and mark the beginnings and ends of state-1-periods and state-2-periods. If we denote with
the length (expressed in the number of slots) of the
kth state-
i-period, then the series
form two sets of i.i.d. stochastic variables. Their distribution is given by
where we have introduced the probability generating functions (pgfs)
. We limit the
to be rational functions of their argument:
with
and
mutually prime polynomials of degree
and
, respectively, and with
. We define
as:
The probability that an arbitrary slot belongs to a given state is equal to the fraction of time the system is in that state and is given by
The special feature of our model is that the server availability and the arrival process both depend on the system state. Specifically, the distribution of the number of available servers during a slot depends on the system state during that slot in the following way:
During every slot, there is at least one server available and within a given state-
i-period the numbers of available servers during the different slots are i.i.d. from slot to slot. Similarly to the
, we also limit the
to be rational functions of their argument:
with
and
mutually prime polynomials of degree
and
, respectively, and with
. We define
as:
The numbers of arrivals during the different slots of a given state-
i-period are i.i.d. from slot to slot as well. Their common distribution is characterized by
The average arrival intensity is then given by
Customers can only start service at slot boundaries, so an arriving customer can only be taken into service at the beginning of the next slot, even if a server is idle at the moment of arrival. The queue capacity is assumed to be infinite, so an arriving customer will always join the system. Each customer requires exactly one slot of service.
We assume the system reaches steady state and, therefore, the average number of customers entering the system should be strictly smaller than the average number of available servers [
23], leading to the following stability condition:
Furthermore, it will prove useful to introduce the following notation:
3. System Content
In an earlier work [
16], we analyzed the system content for a queueing model as described above. In the current section, we repeat the main results that are necessary for the delay analysis in this paper. Let us denote with the stochastic variable
(
), the total number of customers in the system at the beginning of the
st slot of a state-
i-period. The corresponding pgf is
. We can derive the following recursive equation, valid for
:
We can obtain a set of two linear equations for the functions
by recursive application of (16) and by stating that the system content at the beginning of a state-
i-period equals the system content at the end of a state-
-period. This set of equations can then be solved to yield the following expression:
with the bivariate functions
unknown. It can be proven that if
and
are rational functions of their argument, then also the
are rational and of the following form:
The (finite number of) unknowns can be determined by relying on the properties of pgfs, namely that they are normalized and that they are analytical within the complex unit disk. To do this, the roots within the complex unit disk of the denominator of (17) need to be determined and a set of linear equations needs to be solved. For many common choices of the distributions in the model, this does not require large computational effort. Similarly, it is possible to obtain the pgfs of the system content at the beginning of an arbitrary state-i-slot and at the beginning of an arbitrary slot. Based on these pgfs, important performance metrics can be calculated, such as the expected number of customers in the system.
4. Delay of a Customer with Customers Ahead
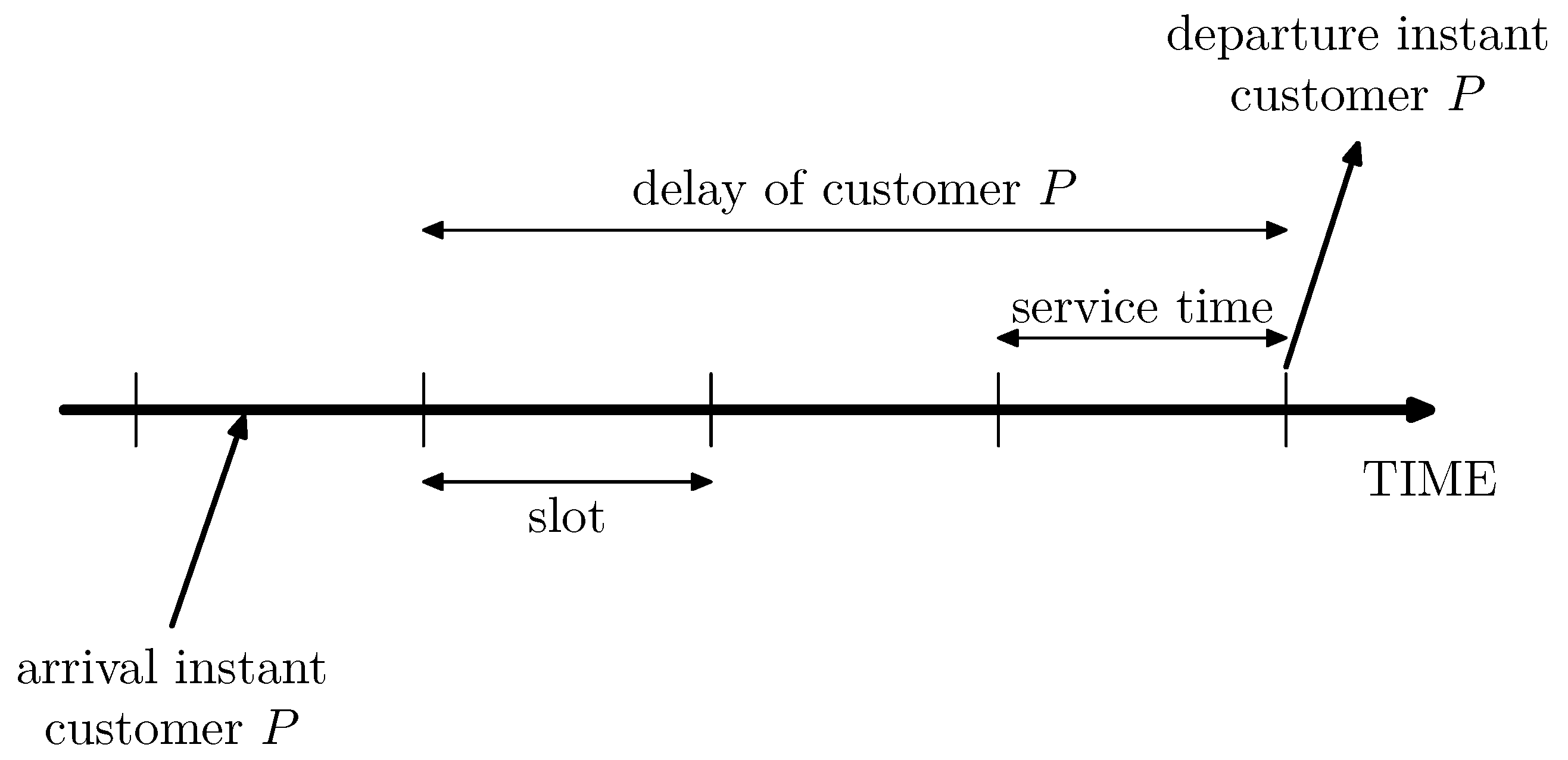
For the system content, the specific queueing discipline is not of importance, as long as it is work conserving. However, for the delay analysis it needs to be specified. We will assume a First Come First Served (FCFS) policy. We do not specify the exact arrival instant of a customer within a slot and, therefore, define its delay as the time interval from the first slot boundary after the customer’s arrival until the end of its service slot. This definition is illustrated in
Figure 1. The delay thus consists of an integer number of slots and is at least one slot long. This setup is also referred to as a Late Arrival System with Delayed Access (LAS-DA) [
24].
Let us denote with the stochastic variable
the delay of a customer that arrives during a state-
i-slot, with
n more slots until the next state-
-slot and with
k customers waiting in the queue with priority over the arriving customer (excluding the customer(s) currently in service, if any). The corresponding pgf is
. Clearly, if during the slot after the considered customer’s arrival slot more than
k servers are available, the customer’s delay will consist of exactly one slot. Otherwise, if during the first delay slot only
servers are available, there will be an additional number of delay slots that corresponds to the delay of a customer with
customers ahead. Based on these observations, we can state
Furthermore, we use the stochastic variable
for the delay of a customer arriving during the first slot of a state-
i-period and with
k customers in the queue with priority over the arriving customer. The corresponding pgf
can be expressed as
Let us now introduce two auxiliary functions
Using the Relations (19) and (20), we obtain
After recursive application this leads to
Multiplying (26) with
and summing over all
we get
Using (21) we can also work out an expression for
:
Combining (27) and (28) we then obtain the following set of equations:
which can be solved to find an explicit expression for
:
with
Note that
is divisible by
as
. Bearing in mind that all pgfs are normalized, we can furthermore verify that
is divisible by
,
and
. In order to rewrite (30) as a rational function of
x, we divide numerator and denominator by those common factors. To remove the remaining poles in
x in
, we multiply with the auxiliary function
, which in view of (4) and (9) is defined as
Therefore, we obtain
with
The new denominator
of
is a polynomial in
x of degree
and the numerator is of degree
. We can do a partial fraction expansion of
based on its poles
in
x, which we assume distinct. Note that the
(
) are functions of
z, but for notational simplicity the argument is omitted. We can then write
as
with
The above allows us to easily obtain an expression for
, which is the pgf of the delay of a customer arriving during the first slot of a state-
i-period with
k customers waiting in the queue with priority over the considered customer:
5. Delay of an Arbitrary Customer
Let us now consider the arbitrary customer
P, arriving during slot
S. We denote the probability that
S is a state-
i-slot with
and that it is the
lth slot of a state-
i-period of in total
slots as
:
The pgf
of the number of customers that arrive during slot
S but before customer
P and given that
S is a state-
i-slot is known to be given by (see, e.g., [
1])
The queue content as experienced by
P upon arrival, are the customers with priority over
P that can start service after
S. It thus consists of the customers that were present in the system at the beginning of
S, minus those that receive service during
S and plus those that arrived during
S but before
P. It is a stochastic variable that depends on the state of
S and on the time since the last state change. Given that
S is the
lth slot of a state-
i-period, we will denote this stochastic variable as
(
). Its pgf
can be obtained by translating the above observations into the
z-domain:
We will denote the inverse
z-transform of the above pgf as
. We can now develop the pgf
of the delay of an arbitrary customer
The functions
are assumed to be rational, if we further assume that they only have poles of multiplicity 1, we can write them in the form
Note that the summations in the above formula do not necessarily both appear. In the remainder of this paper, we will assume that both summations are present, the results can be easily modified for the other cases. The corresponding probability mass function (pmf)
can be written as
We substitute (46) into (44) and rearrange the summations to get:
We will look at the above expression in more detail in two steps and, therefore, introduce the following auxiliary notations:
Let us first look at (48) for
. In that case, the arrival slot of customer
P is the last slot of a state-
i-period. We denote with
n the number of servers available in the next slot (which is the first slot of a state-
-period). With probability
there are
k customers waiting in the queue with priority over
P. The delay of the tagged customer
P is 1 slot if
, or the pgf of its delay is given by
if
. In the
z-domain, this yields
where we have also introduced (39). Similarly, we now look at the situation where
, with
. The arrival slot of customer
P is the penultimate slot of a state-
i-period. We denote with
and
the number of servers available in the next two slots (of which one is the last slot of a state-
i-period and one is the first slot of a state-
-period). With probability
, there are
k customers waiting in the queue with priority over the tagged customer
P. The delay of
P equals 1 slot if
, the delay equals 2 slots if
and the pgf of its delay is given by
if
. In the
z-domain, this yields
The same reasoning can be applied to obtain an expression for the general function
. There are
full slots until the next state-
-period. In these slots,
servers are available, with probabilities
and in the slot afterwards (the first slot of a state-
-period), there are
servers available with probability
. With probability
there are
k customers waiting in the queue with priority over the tagged customer
P. The delay of
P equals
s slots (with
) if
and its delay is defined by the pgf
if
. In the
z-domain, this yields
Now, we look at the second part of (47). In order to work out
as given in (49), we first introduce the following auxiliary functions:
Taking first the sum over
k in (54), we identify the definition of
as given in (23), so we can bring expression (26) into (54) and then work out the summation over
n:
Using the expression (28) for
, we obtain
We then fill in the expression (34) for
and rearrange to get
with
a polynomial in
x of degree
M as given in (36) and with
which can be shown to be a polynomial function in
x of degree
. We can do a partial fraction expansion of
based on its poles
in
x. We can then obtain an expression for
as
These results now allow us to work out
, taking the summation over
n in (49) introduces
, so we get
where
is defined as
Using (15), (16) and (43), we can rewrite the expression for
as
where the functions
are still unknown, but they are similar to the functions
in (18). It can be proven that they are rational functions with denominator equal to the denominator of
and that the unknown coefficients of their numerators can be determined using the properties of pgfs. However, it will turn out that it is not necessary to determine these unknowns.
We now have an expression for
, the pgf of the delay of an arbitrary customer:
The above expression is rather complex and, therefore, cannot be easily inverted to give the full delay analysis. On top of that, it still contains (a finite number of) unknowns. However, a tail approximation can be obtained, which will be done in the following section.
6. Tail Approximation
To obtain a tail approximation of the delay, we can use the theory of the dominant singularity, which has been used extensively in the literature, see for example [
11,
25]. The theory stipulates that
for
k sufficiently large and with
the pole of
with smallest modulus and with
Note that
will be positive, real-valued and strictly larger than 1, see, e.g., [
11]. Let us take a closer look at
and its subparts (52) and (60) to determine where the dominant pole
can be found. The functions
are polynomials and, therefore, contain no poles. The
(
) are assumed to be single roots of
and, therefore,
contains no zeros. Furthermore,
cannot give a pole, as
has no solutions. Therefore,
can only be a pole of
, a pole of
or a pole of
.
Conjecture 1. The dominant pole can only be found as a pole of .
From (17) it follows that
and
have the same poles. The dominant pole
, therefore, appears in
and
, for
and
. It is found for a specific value of
, which we will call
and we will denote the value of
as
. Using (66), we can find an expression for
:
with
where furthermore
and
Following an application of L’Hôpital’s Rule
is then obtained from (17) by dividing the numerator of
by the derivative with respect to
z of its denominator and evaluating at
:
In order to evaluate
we recall that
is a solution of
Deriving both sides of the above equation with respect to
z, working out for
and evaluating at
, we find
Note that does not necessarily exist. Indeed, if we consider the case where every slot contains at most 1 arrival, every arriving customer will experience an empty queue, and will be served in the slot following its slot of arrival. The delay will be 1 for all customers, i.e., .







{kind=link}
{kind=link}
{kind=link}