1. Introduction
Process monitoring involving the fault detection and estimation is crucial to process safety. The existing technology can be divided into three categories: based on mathematical model, based on data-driven empirical model and fault detection technology combining empirical model and plant prior information. Data driven method can refer to system identification areas [
1,
2,
3,
4], etc. While the mathematical model method has better extrapolation, and empirical model is more convenient to design. Many works have made important contributions in the aspect of fault detection: see [
5,
6,
7,
8,
9,
10,
11,
12]. Those contributions contain adaptive observer [
13,
14], sliding mode observer [
15]. The recent works [
16,
17] present full-order and reduced-order sliding mode observer (SMO) for Markov jump systems. In [
18], the linear matrix inequality (LMI) theory is used to realize the fault estimation of synchronous actuator and sensor for Markov jump system. On this basis, the stochastic process model is established, the approximate fault estimation is made, and the time to failure (TTF) estimation is achieved in [
19,
20].
In practical application, robust fault estimation is the key to realize real-time monitoring, diagnosis and fault-tolerant control. Many contributions have been made to solve the related problems. In [
21], the augmented system is first configured to contain the plant state of interest and the augmented state of the fault. An optimization method of unknown input observer (UIO) based on LMI is proposed to minimize the stability of the estimation error dynamic and the influence of disturbance. Aiming at the problem of state estimation and fault estimation for discrete time systems, in [
22], a robust estimation method based on linear matrix inequality (LMI) technique and generalized systems theory is proposed. An observer design method is proposed in [
23] for Takagi-Sugeno fuzzy systems in the presence of process uncertainties and unexpected failures. Concretely, a robust state estimation and fault estimation for all controlled objects are realized by using UIO technology, augmented system theory and sliding mode control method.
A lot of industrial systems, such as fluid flow and chemical reaction processes, all exhibit spatio-temporal dynamics, that is, the state of the system is spatial-varying and time-varying. Hence, the temporal dynamic representation is not suitable for displaying their behavior, and the observer design is a challenging problem. Moreover, the fault detection and estimation of space-time systems are more challenging. Most of the existing fault detection methods are based on modal analysis. For example, [
24] uses the modal analysis technique based method to develop a fault detection observer. Similarly, the work [
25] designs a robust observer to solve the problem of fault detection and state estimation.
The above techniques make use of the model approximation, which results in false alarm due to model reduction. In [
26], an adaptive PDE observer is developed for positive system to realize fault accommodation. In our recent work [
27], two filters are proposed based on the Luenberger observer, and then novel parameter adaptation laws were proposed to address boundary fault estimation issues.
In this paper, we propose a scheme for state and fault estimation of a linear hyperbolic PDE system with
unknown disturbances based on the plant
observer canonical form. Unlike [
28], where additive faults are considered and some real positive conditions need to be satisfied, this article considers
multiplicative faults. Especially, when the actuator and sensor fail at the same time, the estimation problem becomes more challenging.
The contributions are as follows:
The problem of state and fault estimation in two cases is solved: (1). only one type of fault (sensor or actuator) occurs; (2). the sensor and actuator failed simultaneously.
By proposing novel transformation, the observer canonical form of the system of interest is obtained. Consequently, two auxiliary filters are designed, and based on which the novel adaptation laws are proposed.
We show that in sense of Lyapunov stability fault parameter estimation converges exponentially fast.
This paper is organized as follows:
Section 2 introduces the system considered and multiplicative boundary faults.
Section 3 describes the design of fault parameter adaptation law based on the
observer canonical form. In
Section 4, numerical simulations are performed to illustrate the validity of the proposed results.
Notation
Given the vector variables
which is spatially varying and continuous, the following operator is defined:
where
is a real number, with the derived norm
The integral operator (
1) has the following property
where
represents the derivative of
w.r.t the spatial variable
. In subsequent sections, we will write
(or
) and
(or
) to stand for
and
, respectively.
The norm
is equivalent to the standard
-norm, namely, there exist positive constants
,
such that
For brevity, the argument in time and space are often omitted, i.e., , .
2. Problem Statement
We consider the following PDEs:
defined on the domain
, where
and
h denote system coefficient functions,
,
stands for the system state,
denotes a real Hilbert space with the inner product
,
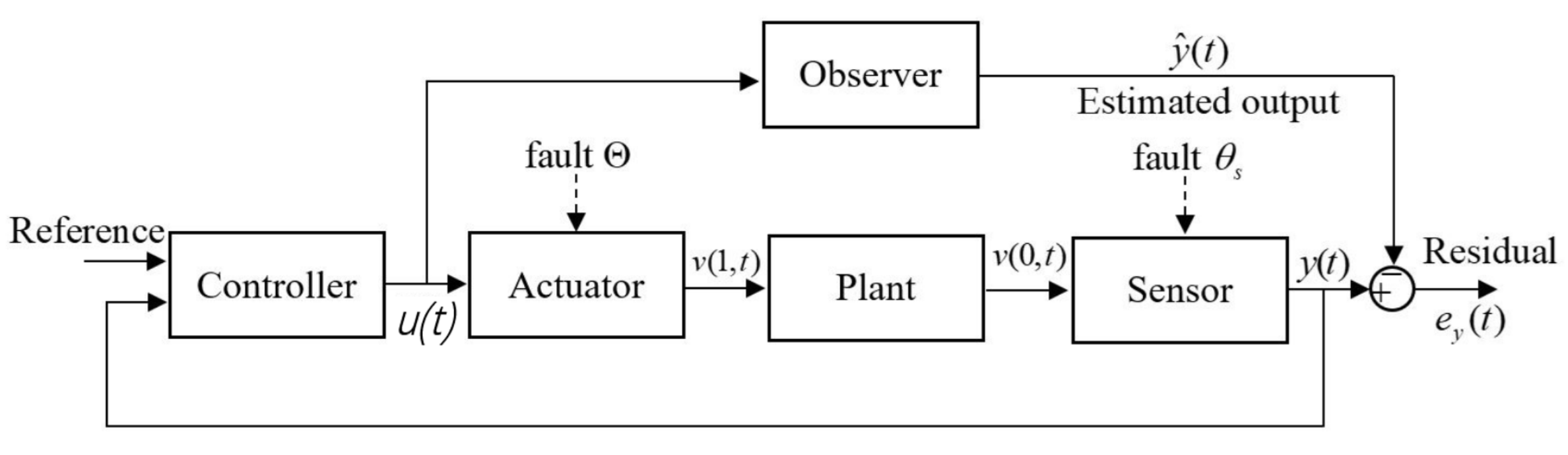
. As shown in
Figure 1, and the sensor output is denoted by
, and
stands for actuator input.
is an external unknown disturbance satisfying:
Assumption 1. The disturbance is bounded:where is a known constant. From
Figure 1, the boundary condition and the output can be defined according to fault occurrence (at
):
Sensor Fault:
where
and
denote actuator and sensor faults, respectively,
and
.
In practice, due to the obstacle of unknown faults, the information of boundary conditions and is not available.
In this work, the objective is to estimate the unknown fault during the following fault occurrences:
Assumption 2. Fault parameters are assumed to be time-invariant and bounded:with , , as known parameters. 3. Adaptive Estimation Laws
Since the available information is the sensor output and the input , it is challenging to address the fault estimation problems. To this end, different strategies will be proposed based on the cases [p1], [p2] and [p3].
We define the triangles
and the spaces
and
.
The considered real process system (called as plant) (
5)–(
7) is first converted into the following form:
by performing the following transformation and inverse transformation:
and
with
and
,
denoting the identity operator on
and the operator
defined by:
for all
, and
given
and
.
In (
13),
, and
and
give the flexibility to make transformation successful. Here, variables
satisfy the following set of kernel equations:
with boundary conditions:
From (
15) and (
19), it follows that
During the transformation, the terms
and
can be computed:
Remark 1. Transformations in (14) and (15) is bounded, and let us define and , then we can obtain , where . 3.1. Filters and Non-Adaptive Estimate
We design the following filters:
and
where
and
are the initial conditions of the proposed filers. The explicit solutions to the filters (
23)–(
24) and (
25)–(
26) can be obtained:
Corresponding to different cases of fault occurrence, we consider the following non-adaptive state estimates:
- c1.
(Actuator fault estimation) For the problem
[p1]:
- c2.
(Sensor fault estimation) For the problem
[p2]:
- c3.
(Simultaneous fault estimation) For the problem
[p3]:
Lemma 1. We consider the plant (5)–(7) with different fault occurrence, the filters (23)–(26) and the state estimate in (29), (30) and (31). After a finite time , with , one will have Proof. Let us define
, then we have:
the solution of which is
which directly shows that after
the
, and therefore this completes the proof. □
3.2. Adaptive Laws
Motivated by the above results, the following adaptive observers are constructed:
- c1.
(Healthy State estimation) Healthy case:
where,
is the detection residual.
and
denote estimates of
and
, respectively.
- c2.
(Actuator fault estimation) For the problem
[p1]:
where
is the estimate of
.
- c3.
(Sensor fault estimation) For the problem
[p2]:
where
denotes the estimate of
.
- c4.
(Simultaneous fault estimation) For the problem
[p3]:
3.3. Single Type of Fault Estimation
In this subsection, the adaptive law and the adaptive observer will be proposed to address the problem of the single type fault estimation, i.e, [p1] and [p2] respectively. In particular, the output residual can be calculated: for actuator fault estimation [p1]; for sensor fault estimation [p2].
It is given that only one type of fault happens. In the problem
[p1], the following adaptation law is employed:
with design parameters
and
, where the operator
is defined by
to estimate
and
. In the problem
[p2], the following adaptation law is applied:
to estimate the plant state, with
and the projection operator given as:
Theorem 1. The adaptive laws (44) and (46) corresponding to actuator and sensor faults, respectively, provide the following properties:where and andwith defined in (47). Proof. We define a new error signal for actuator and sensor faults, respectively:
and
- (a)
Proof part of Actuator fault:
Construct a Lyapunov function candidate:
where the design parameters
b,
and
are positive constants. Taking time derivative of (
57) gives:
where
. Applying the property (
3) and Young’s inequality, plugging the parameter adaptation law (
44), and using
yield
therein the identity
is employed. Moreover, the inequality
was used. By combining (
38)–(
39) and (
54), for the actuator fault, one gets:
Based on the equation (
60), one can replace
in (
59), inserting
and using Cauchy-Schwartz inequality give:
with the positive constant:
and
where we choose the design parameters satisfying
From (
62), by choosing large values of
and
, a small value of
, then
becomes an arbitrarily small positive constant. Based on the inequality (
61), when
and
for all
, then
, which means
. Hence,
is exponentially decreasing. Then, after a finite time
, we get
, for all
. Integrating (
61) from zero to infinity gives
. From (
60), we get for
which shows
. From the adaptive law (
44), we get
- (b)
Proof part of Sensor fault:
Construct the following Lyapunov candidate
with parameters
,
and
. Differentiating
w.r.t time along the dynamics (
56), one obtains:
Applying the property (
3) and Young’s inequality, substituting the parameter adaptation law (
44), and applying
, and inserting the parameter adaptation law (
46), one gets:
where
is used. From (
40)–(
41) and (
55), one obtains:
Using (
69) to replace the nonlinear term
and employing Cauchy-Schwartz inequality give:
with the positive constant
and
where we choose the design parameters
From the inequality (
70) and for
and
,
, we have
, which implies that
is decreasing exponentially and there exists a finite time
such that
,
.
Integrating (
70) from zero to infinity gives
. From (
69), we get for
which shows
. From the adaptive law (
46), we get
This completes the proof. □
3.4. Simultaneous Faults Estimation
We turn to the most challenging estimation problem [p3]. The problem [p3] includes cases [p1] and [p2]: [p1] is equivalent to [p3] with while [p2] can be regarded as [p3] with . To solve the problem [p3], it is required to develop coupled parameter adaptation laws for estimating and simultaneously.
Let us consider that actuator and sensor faults simultaneously occur to the plant (
5)–(
7). We construct the adaptive observer (
42) and (
43) and the following parameter adaptation laws:
with design parameters
,
and
.
Theorem 2. (Simultaneous fault estimation) The adaptive laws (75) and (76) provide the following properties: Proof. By following the similar steps in Theorem 1, we introduce the following variable:
Based the equations (
42), (
43) and (
81), the error signal
can be expressed:
A direct calculation shows that
also satisfies
In addition, the detection residual
is expressed as:
We consider a Lyapunov candidate:
with parameters
,
and
, where
. The sensor fault parameter
is positive and hence
is positive definite. Taking the time derivative of
gives:
We use property (
3) and Young’s inequality, the adaptation law (
75) and (
76), and
to obtain:
According to (
84), one can replace
and apply Cauchy-Schwartz inequality to obtain:
with
and
, where
and
are used. The design parameters can be chosen:
Repeating the similar steps as Theorem 1, we see that after a finite time , holds. Hence, and become arbitrarily small. □
4. Simulation Results
In this section, we will examine the performance of the proposed method by simulating the occurrence of different faults [p1], [p2] and [p3].
We use the system in [
29] as a representative system, which is a Korteweg-de Vries (KdV)-like equation typically describing the dynamics of shallow water wave. The functions in the system are given by
with
,
and
. We formulate the boundary control:
with
, and the second term is a stabilization term.
satisfies the kernel Equation (
14) in [
30]. Moreover, the initial condition is
for
.
The actuator and sensor faults are as follows:
Different occurrences with different exogenous disturbance
are shown in
Table 1, where ‘★’ indicates the fault occurrences and ‘-’ shows no faults.
4.1. Adaptive Fault Estimation
According to
[p1],
[p2] and
[p3], we formulated the adaptive observers (
38)–(
43), respectively. Moreover, initial conditions are
and
. The design parameters are listed in the following table:
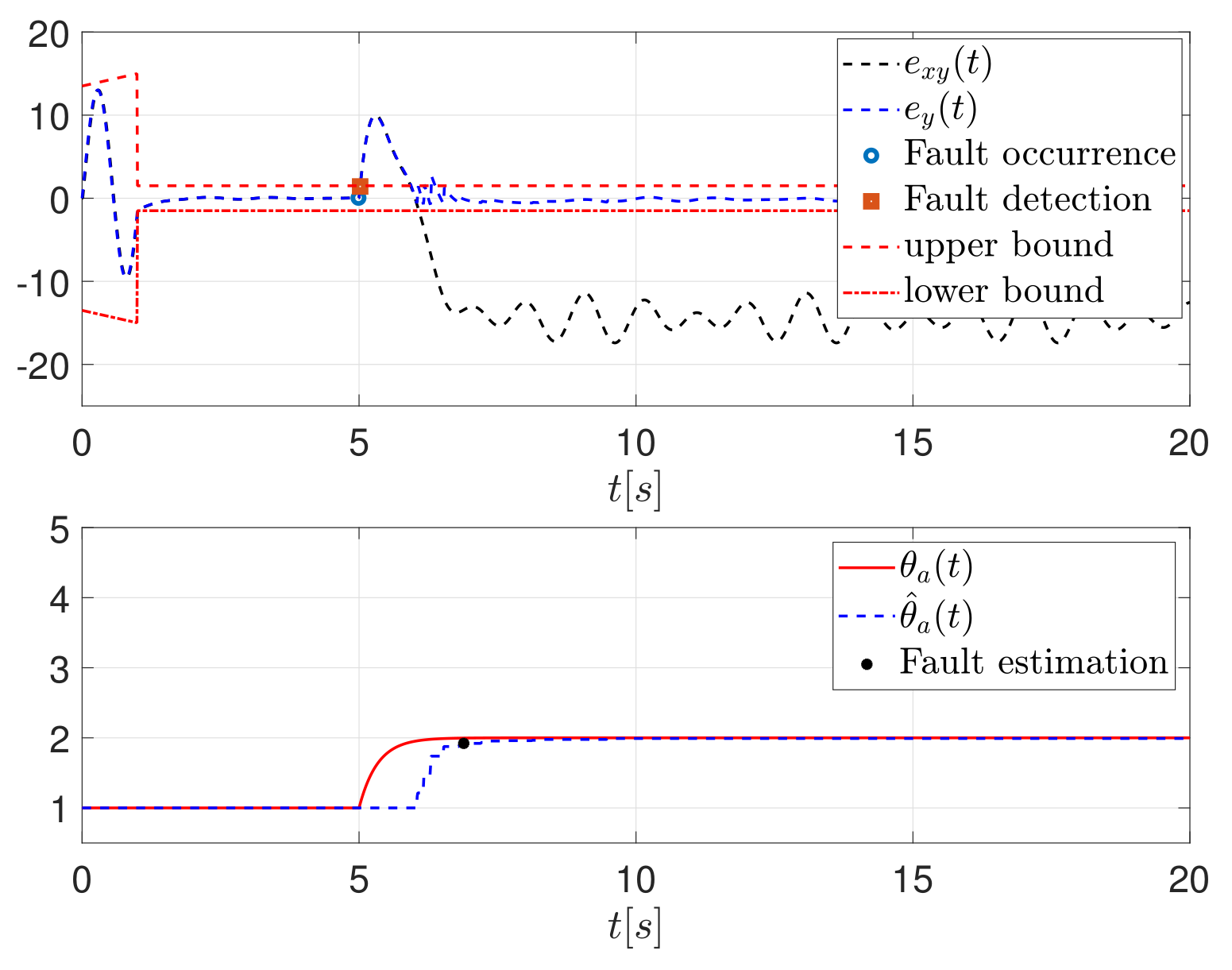
4.1.1. Actuator Fault Estimation
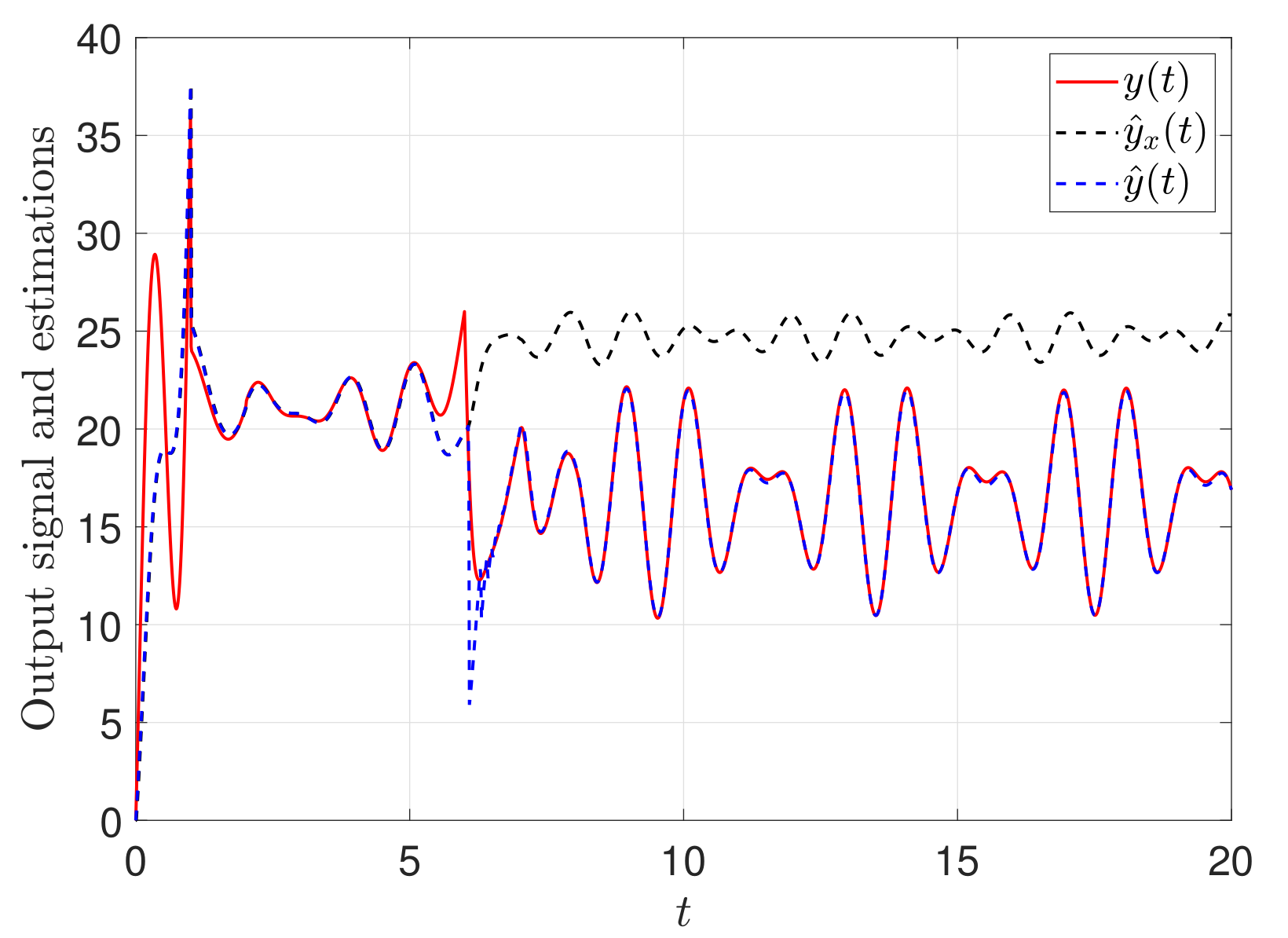
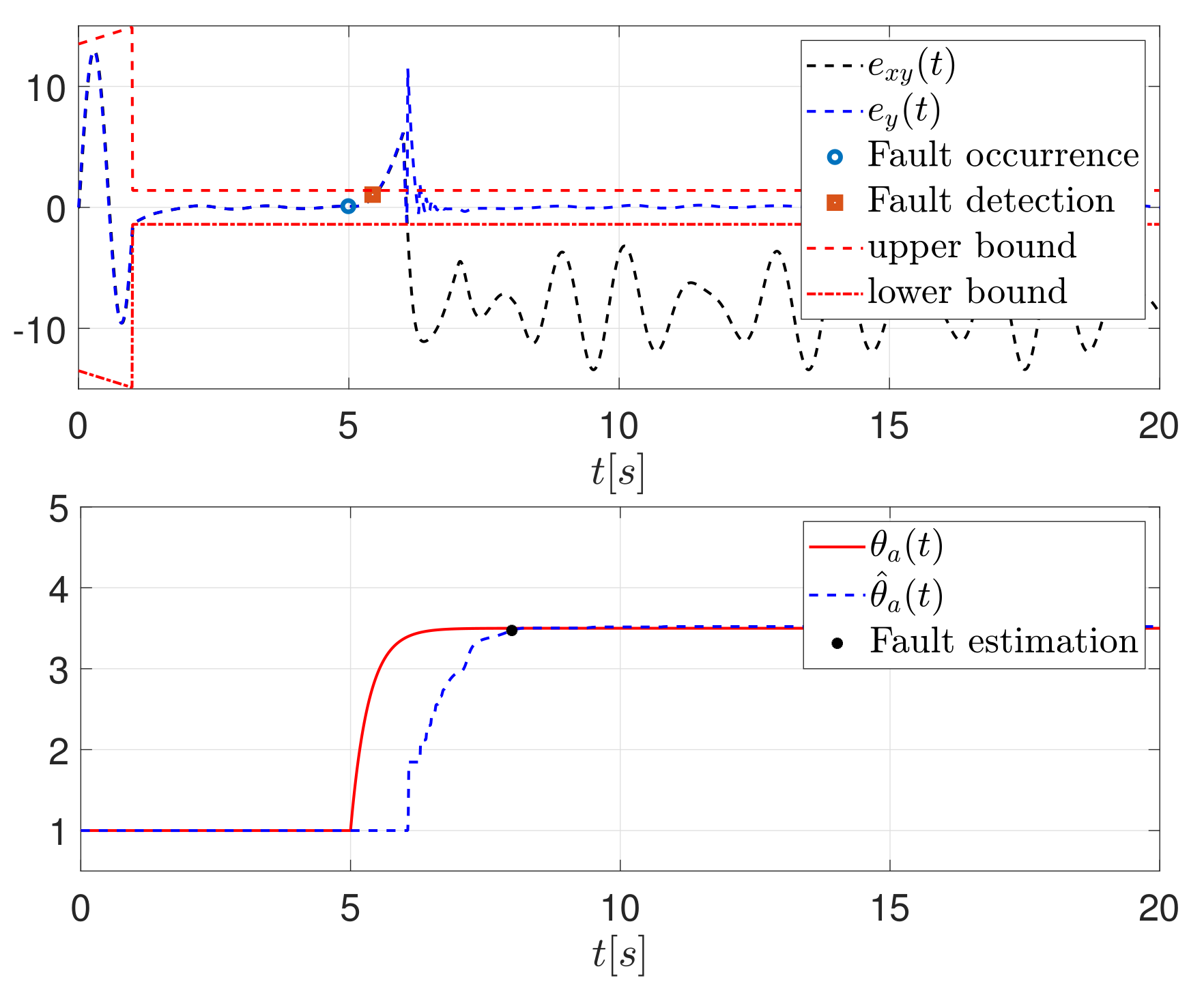
We simulate the system in the case of
[p1]. The actuator fault occurs at
and becomes constant after
. In
Figure 2, the oscillation arises due to the perturbation
as shown in
Table 1. Applying the adaptation law (
44) ensures that in
Figure 2 the estimate
(blue dotted line) converges to the measurement
(solid line). As shown in
Figure 3, the estimate
is exponentially convergent. We also use the common Lunberger observer (
35)–(
37), but the estimate
(black dotted line) deviates from the measurement. Particularly, the mean square error (MSE) is calculated for the output estimates to show performance.
4.1.2. Sensor Fault Estimation
In this subsection, we investigate the performance of the proposed observer (
40) and (
41) and the adaptive law (
46). We simulate the situation when the same system fails. Sensor fault occurs at
, and is kept unchanging after
. A new external perturbation
shown in
Table 2 effects the system, where ‘★’ indicates the fault occurrences and ‘-’ shows no faults. A comparison between
and
, see
Figure 4 and
Figure 5, where
is generated by the common Lunberger observer (
35)–(
37) and
is from the recommended observer (
40) and (
41). Apparently, the
(blue dashed line) exponentially converges to the measurement and the resulting residual
exponentially decays to a very small value in
Figure 5. However, the common Lunberger observer (
35)–(
37) fails to give satisfactory results.
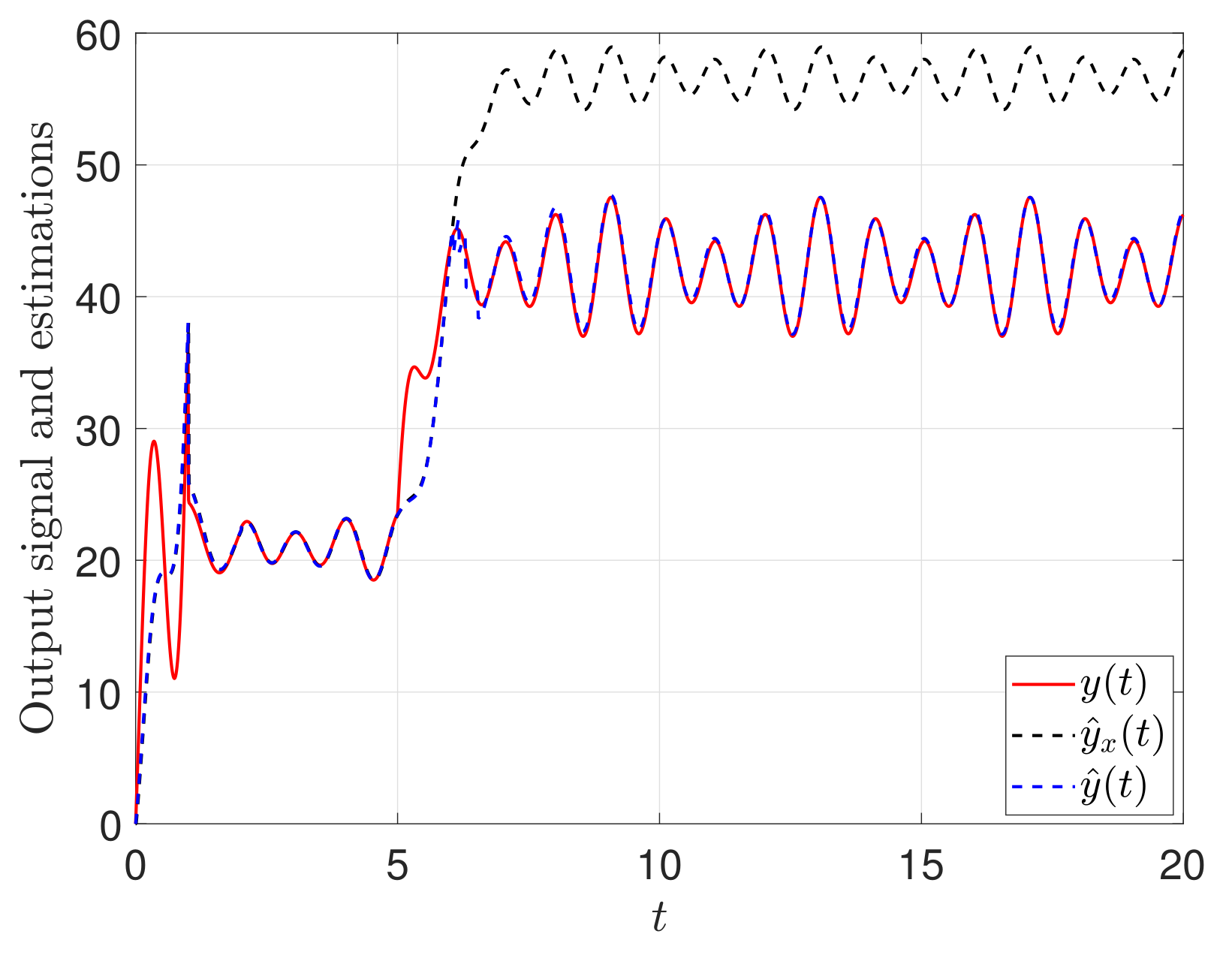
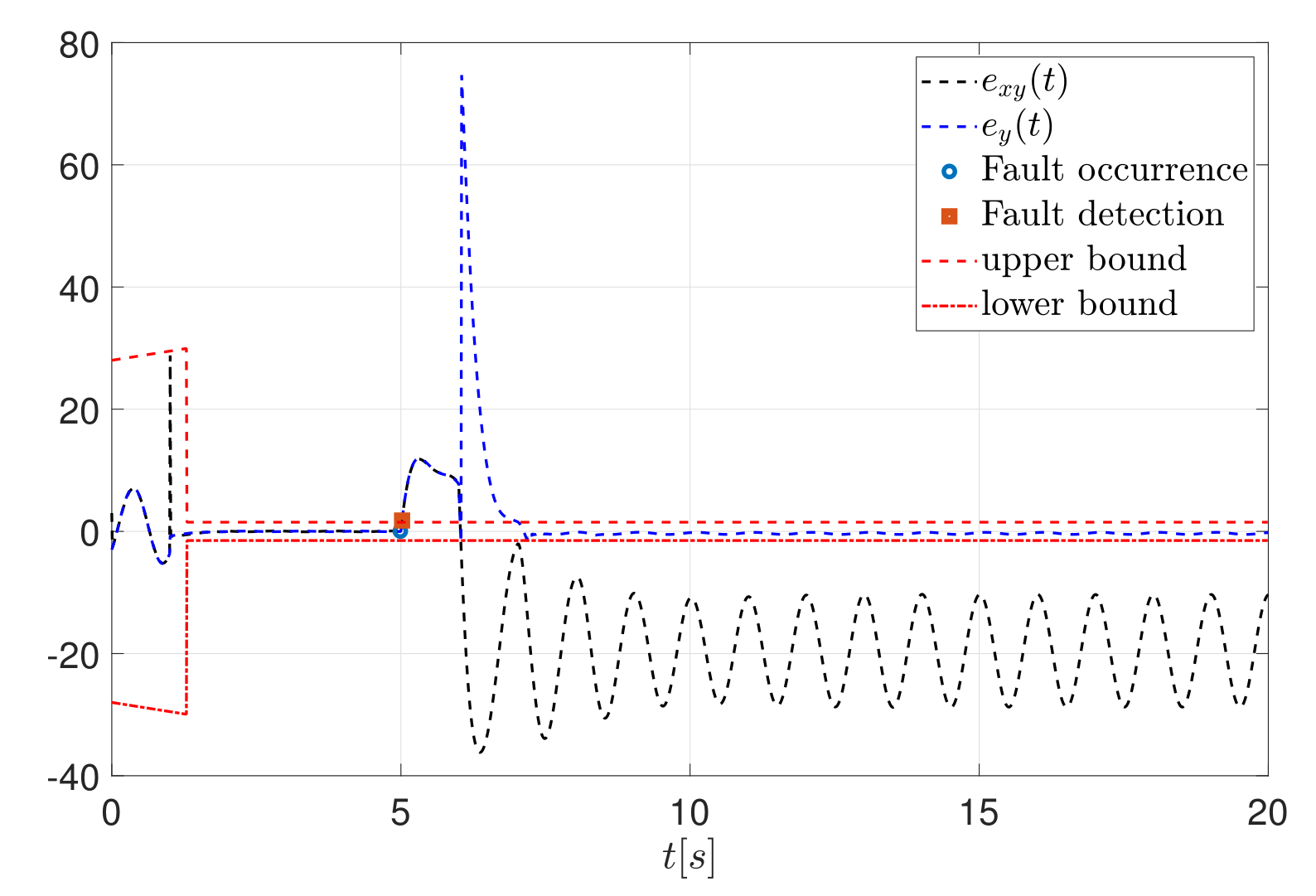
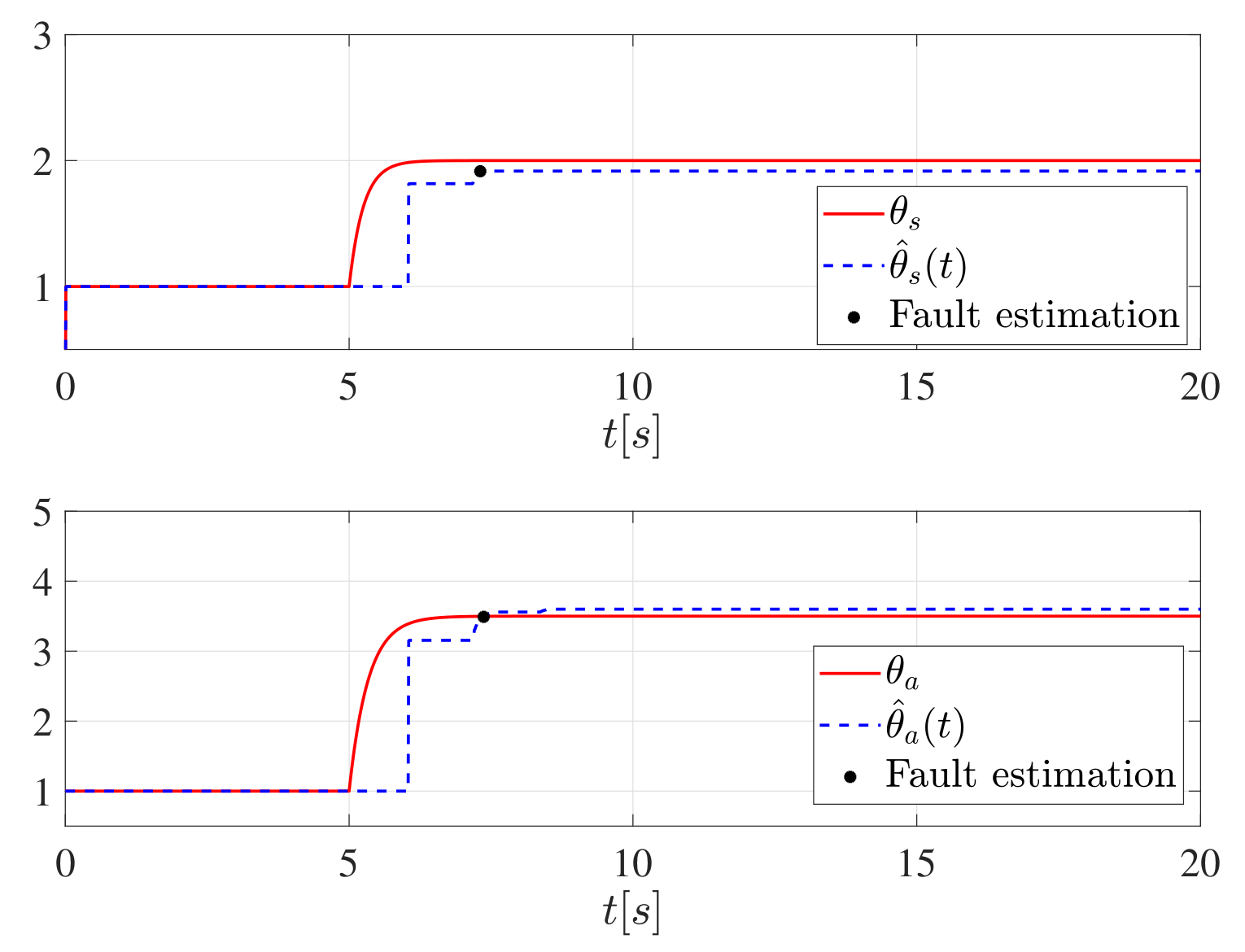
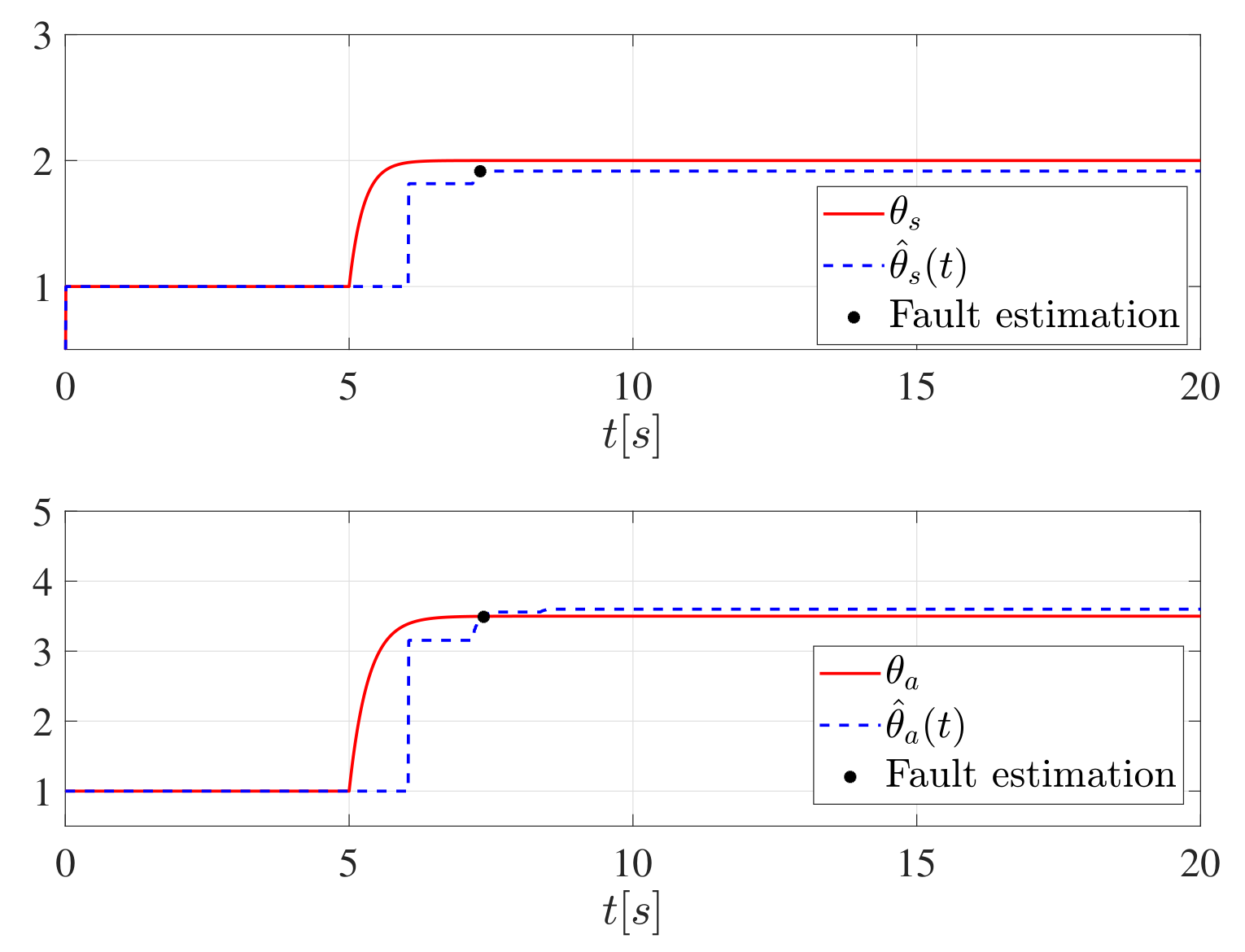
4.1.3. Simultaneous Fault Estimation
In this section, we carry out a simulation with the fault
[P3]: both actuator and sensor faults occur at
and remain unchanged after
.
is the external disturbance defined in
Table 1. We apply the adaptive observer (
42) and (
43) and coupling parameter adaptive law (
75) and (
76). Expected state estimates
,
and
converge to
,
and
. The results in
Figure 6 and
Figure 7 directly show the performance of the proposed method.The observation error generated by the proposed observer (
42) and (
43)
and the residual
attenuates to a very small value around zero: see the dashed blue line in the
Figure 6. However, the common observer (
35)–(
37) is unable to provide acceptable estimates as shown in the black dotted line in the
Figure 6.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}