
Fractional Line Integral



{kind=link}
{kind=link}
Abstract
1. Introduction
2. Background
2.1. Functional Framework
- are almost everywhere continuous;
- have bounded variation;
- verify:In particular, we can have (this is called a right-hand function).
2.2. Suitable Fractional Derivatives
2.3. Order-One Definite Integral
2.4. Fractional Definite Integral
3. The Grünwald–Letnikov and Liouville Directional Derivatives
- The exponential is the eigenfunction of the introduced derivatives;
- The BLT, of the derivatives of , is given by:where With we obtained the same result for the Fourier transform.
- Linearity vectorial functions: Let . Then:
- Commutativity and additivity of the ordersIf
- Neutral and inverse elements:In the previous property, we can set ; therefore, the inverse derivative exists and can be obtained by using the same formula.
- Rotation:Suppose that an invertible matrix exists such that we can perform the variable change for and is not the zero vector. Then:As the matrix A is invertible and is a non-null vector, then . As we introduced and to obtain:which leads to:generalising also a classic result.
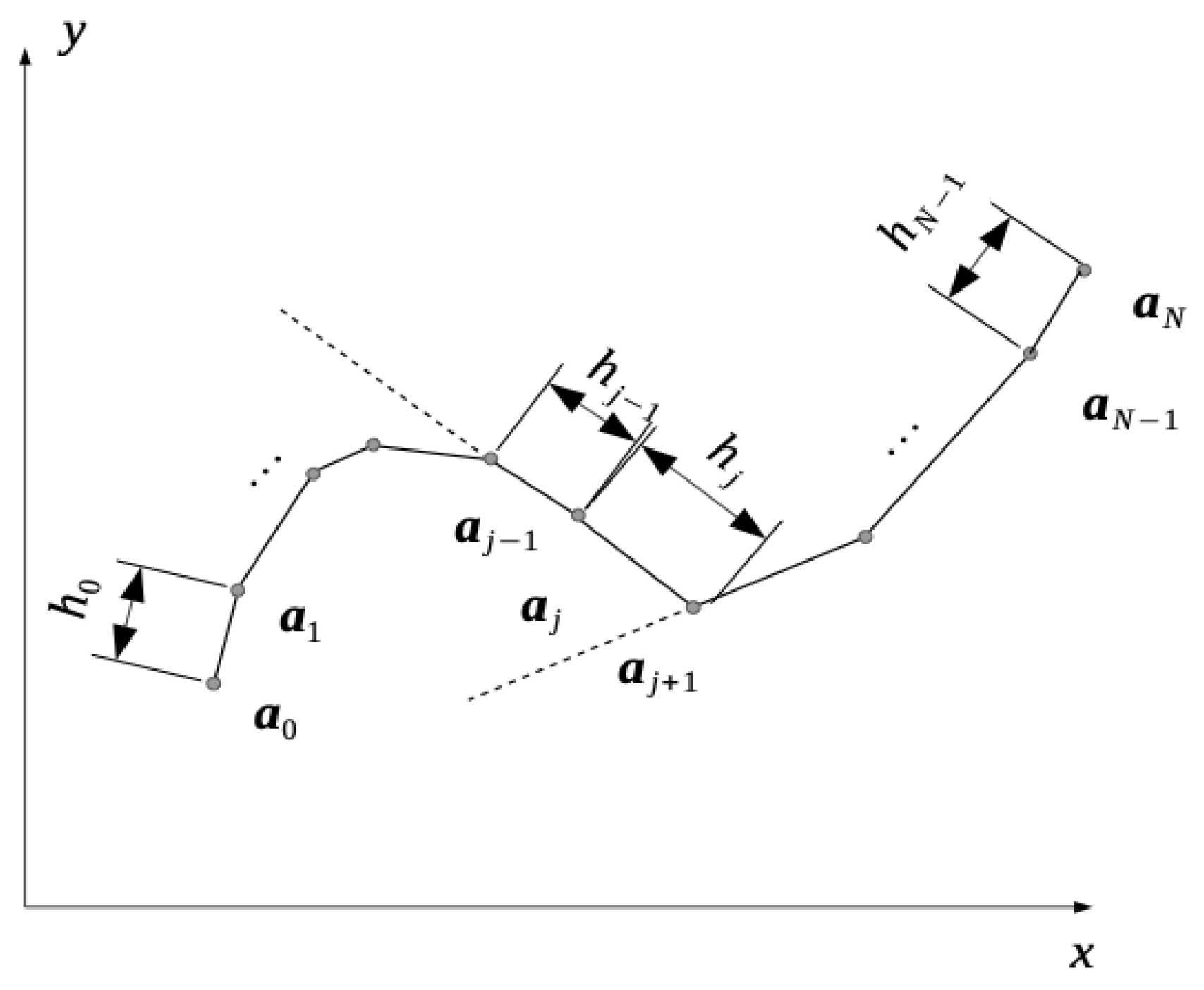
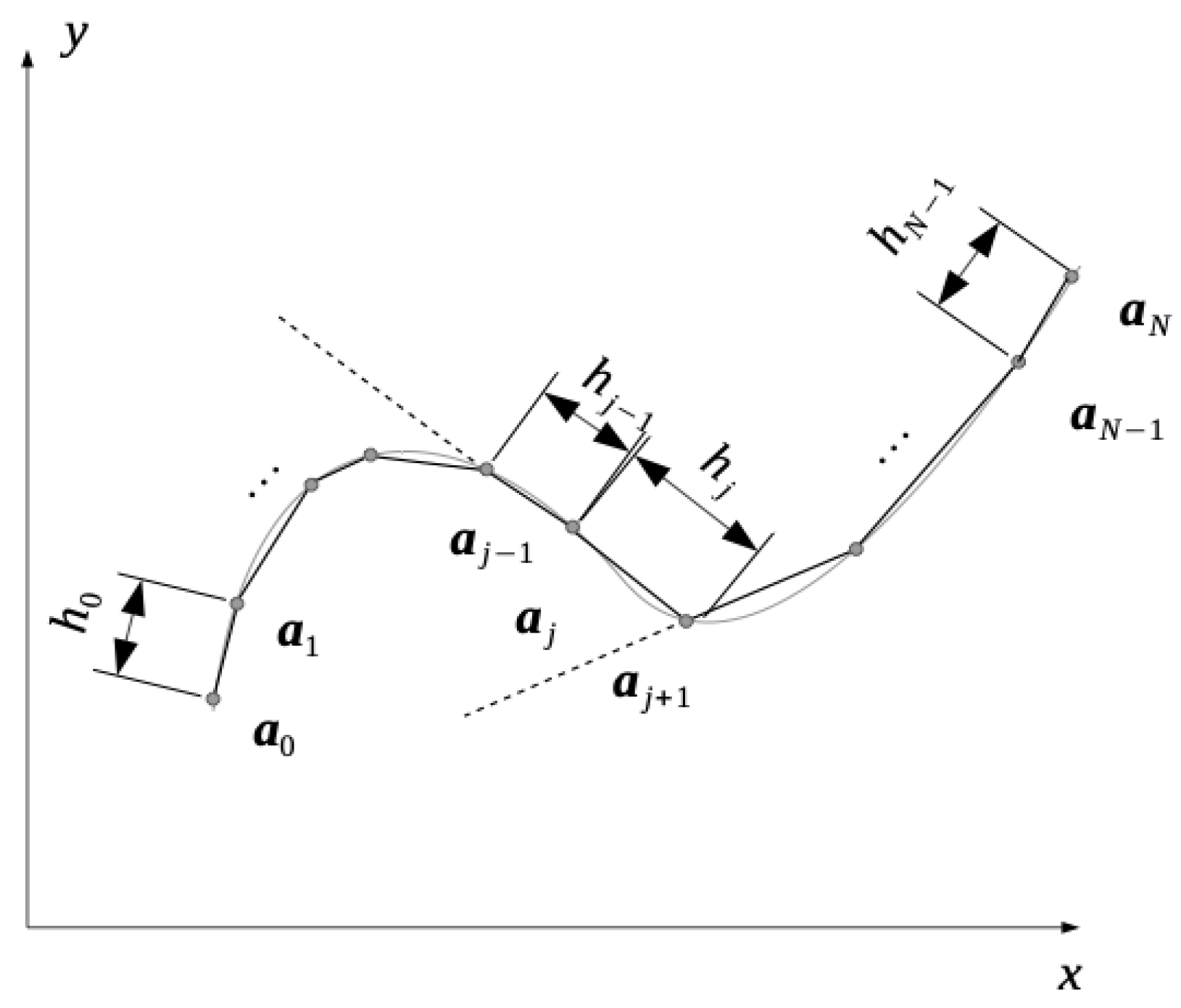
4. On the Fractional Line Integrals
- ;
- is approximately tangent to .
- Linearity:with c and d constants;
- Additivity:Let and be two disjoint lines. If , then ;
- Orientation:Let be the curve . The change in the orientation was obtained in the fractional derivative computation by reversing the tangent vector and the integration limits. Hence:While in the case, , this may not happen in the fractional case, since the direct and reverse fractional anti-derivatives may not be equal.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Herrmann, R. Fractional Calculus: An Introduction for Physicists; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2011. [Google Scholar]
- Machado, J.T. And I say to myself: “What a Fractional World!”. J. Fract. Calc. Appl. Anal. 2011, 14, 635. [Google Scholar]
- Magin, R.L. Fractional Calculus in Bioengineering; Begell House: Danbury, CT, USA, 2006. [Google Scholar]
- Ortigueira, M.D.; Valério, D. Fractional Signals and Systems; De Gruyter: Berlin, Germany; Boston, MA, USA, 2020. [Google Scholar]
- Ortigueira, M.; Machado, J. Fractional Definite Integral. Fractal Fract. 2017, 1, 2. [Google Scholar] [CrossRef]
- Ortigueira, M.; Machado, J. On fractional vectorial calculus. Bull. Pol. Acad. Sci. Tech. Sci. 2018, 66. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Rivero, M.; Trujillo, J. From a generalized Helmholtz decomposition theorem to the fractional Maxwell equations. Commun. Nonlinear Sci. Numer. Simulat. 2015, 22, 1036–1049. [Google Scholar] [CrossRef]
- Ortigueira, M.D. Fractional Calculus for Scientists and Engineers; Lecture Notes in Electrical Engineering, 84; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives. Theory and Applications; Gordon and Breach Sc. Publ.: London, UK, 1993. [Google Scholar]
- Ortigueira, M.D.; Magin, R.; Trujillo, J.; Velasco, M.P. A real regularised fractional derivative. Signal Image Video Process. 2012, 6, 351–358. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdan, The Netherlands, 2006. [Google Scholar]
- Aleksandrov, A.D.; Kolmogorov, A.N.; Lavrent’ev, M.A. Mathematics: Its Content, Methods and Meaning; Courier Corporation: Chelmsford, MA, USA, 1999. [Google Scholar]
- Apostol, T. Calculus II; Reverté: Badalona, Barcelona, Spain, 2001. [Google Scholar]
- Chaudry, A.; Zubair, M. On a Class of Incomplete Gamma Functions with Application; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bengochea, G.; Ortigueira, M. Fractional Line Integral. Mathematics 2021, 9, 1150. https://doi.org/10.3390/math9101150
Bengochea G, Ortigueira M. Fractional Line Integral. Mathematics. 2021; 9(10):1150. https://doi.org/10.3390/math9101150
Chicago/Turabian StyleBengochea, Gabriel, and Manuel Ortigueira. 2021. "Fractional Line Integral" Mathematics 9, no. 10: 1150. https://doi.org/10.3390/math9101150
APA StyleBengochea, G., & Ortigueira, M. (2021). Fractional Line Integral. Mathematics, 9(10), 1150. https://doi.org/10.3390/math9101150