1. Introduction
Partial differential equations (PDEs) are ubiquitous in mathematically scientific fields and play an important role in engineering and physics. They arise from many purely mathematical considerations, such as the calculus of variations and differential geometry. One of the momentous subclasses of PDEs is the hyperbolic partial differential equations (HPDEs). HPDEs are used to model many phenomena such as biology, industry, atomic physics, and aerospace [
1,
2,
3]. Telegraph and wave equations are the most famous types of HPDEs that are enforceable in various fields such as random walk theory, wave propagation, and signal analysis [
2,
4].
In this study, we construct and analyze a numerical algorithm based on the
-weighted method, and the Galerkin method to solve the HPDEs
with boundary condition
and initial condition
Furthermore, we assume that f, g, and h are the known functions, and also and are real constants.
In this paper, we attempt to apply an efficient scheme that has not been used before to solve such problems. The method includes three steps. In the first step, we use the -weighted method to break the time interval into a finite number of time steps. At each time step, we obtain a linear ordinary differential equation. In the second step, the obtained ODE is solved using the Galerkin method. To do this, interpolating scaling functions are used. In comparison to the scaling function arising from multiresolution analysis (MRA), interpolation scaling functions (ISFs) have some properties that make them attractive. These characteristics include the flexible zero moments, a compact support, orthonormality, and having a closed-form. The most important property of these bases is the interpolation. This property is useful to avoid integrals to find coefficients in expansions. At the last step, the linear algebraic system obtained from the second one must be solved using an appropriate technique. Stability, consistency, and convergence analysis are investigated, and numerical tests guarantee their validity.
Numerous studies proposed a variety of numerical and analytical solutions to HPDEs. Doha et al. [
5] proposed a numerical method based on the collocation method for solving a system consisting of such equations. In [
6], the spectral-Galerkin method is proposed to solve this equation. Singh et al. [
7] solved one-dimensional HPDEs with the initial and boundary conditions (
2) and (
3), using an algorithm based on Chebyshev and Legendre multiwavelets. Dehghan et al. [
8] introduced a numerical scheme based on the cubic B-spline scaling functions to solve (
1) with nonlocal conservation conditions. Bin Jebreen et al. [
4] proposed an efficient method based on the wavelet Galerkin method to solve the Telegraph equation, and the collocation method based on interpolating scaling functions is also used for solving this equation in [
3]. For study, we refer the readers to [
9,
10].
The outline of the paper is as follows.
Section 2 is devoted to the brief introduction to the interpolating scaling function. Mixed
-weighted scheme and Galerkin method based on interpolating scaling functions are used to solve the desired equation and the stability, consistency, and convergence analysis are also investigated in
Section 3.
Section 4 is devoted to some numerical examples to show the ability and accuracy of the proposed method.
2. Interpolating Scaling Functions
To derive a set of bases that covers the multiresolution analysis conditions, Alpert et al. [
11] introduced a set of functions to generate the nested spaces
using piecewise polynomial bases of degree less than
(the multiplicity parameter). Let
be given. Putting
, and
, there is a sequence of nested subspaces that are spanned by
by means of the Interpolating scaling functions
, introduced by Alpert using the Legendre polynomials. Assume that
is the Legendre polynomial of order
r and
are the roots of
. Let
be the Gauss–Legendre quadrature weights [
3,
11]. We determine ISFs as follows:
where
are the Lagrange polynomials
These bases fulfill the orthonormality relation where denotes the -inner product on .
Assume that
is a uniform finite discretization of
. Here, the subintervals
are specified by points
. To project a function into
, we introduce the orthogonal projection
that maps
onto the subspace
. Utilizing this projection, every function
can be represented in the form
Due to the orthonormality of the bases, it is easy to prove that the coefficients
can be obtained by
. To avoid integration, we apply the interpolation property of ISFs [
11,
12], via
Given
r-times continuously differentiable function
, the projection
is bounded by means of
-inner product as
According to this relation, the projection
is convergent when J or r increases. To study more details, we refer the readers to [
13]. Consequently, this projection is convergent with the rate of
.
We determine the vector function
with
includes the scaling functions and called multi-scaling functions. The approximation (
4) can be rewritten using the vector
P whose entries are
as follows:
where
P is a vector of dimensional
.
To approximate a higher-dimensional function, the building blocks of the bases can be utilized. In this regard, one can consider the subspace
that is spanned by
In order to derive an approximation of two-dimensional function
, we apply the projection operator
, viz.
where components of the square matrix
P of order
N are obtained by
and
. If
, we can show that the error can be bounded as follows:
where
is a constant [
12] as follows:
3. Numerical Method of Solution
The main idea behind the proposed method is based on the -weighted scheme and Galerkin methods. In the first step, the -weighted method is used to discretize the time interval into a finite number of time steps. The linear system of ordinary differential equations obtained after the first step can be reduced to a system of algebraic equations by using the Galerkin method in the second one. Thus, one can find the approximate solution of the desired equation at the time step points , ( and ).
To discretize the time variable, we use the
-weighted scheme as follows:
where for simplicity
is assumed to be
, for
(or equivalently
), and also
for a positive constant
and
is a constant. Note that, by selecting the different values for
, one can find various methods, such as implicit method (
), explicit method (
), and the Crank–Nicolson method (
).
Since the remainder term
is a small quantity, one can neglect it and, after simplification, we obtain
Next, this system of ordinary differential equations would be discretized by the Galerkin method based on ISFs. To this end, one can approximate the solution
of (
12) using the projection operator
, via
where
, for
is a vector of dimension
N which must be found. The same approximation could be imagined to
, as
where
is the operational matrix for derivative introduced in [
14,
15,
16].
Replacing (
13) and (
14) in (
12) yields
where
is a
vector that is obtained by projecting the function
into
, viz.
Let
where
I is the identity matrix of dimension
N. Multi-scaling function
are orthonormal bases for
. Thus, they are linearly independent, and then we have the following linear system:
To apply the boundary condition (
2), it can also be projected into
, via
Substituting the first row of
A and the first element of
b by
and
, respectively, we obtain the modified system
Now, note that, to start the steps, the initial condition should be utilized via
and then
where
H is a vector of dimension
N. Utilizing
, Equation (
19) gives a system of equations at every time step
,
. Thus, one can obtain the approximate solution
by means of a linear expansion of interpolating scaling function (
13).
3.1. Stability
To analyze the stability of the time discretization by
-weighted scheme, assume that
is the approximate solution of (
17). We set
as the error that arises from the proposed Galerkin method. Consequently, the roundoff error satisfies
Projecting the error
using
into
, one can write
Inserting (
22) into (
21) and applying the operational matrix of derivative for ISFs, we get
where
. Provided the matrix
A is inverted, it can be shown that
Taking the norm of both sides of (
24), and using the matrix norm property, we obtain the following inequality:
This gives rise to a sufficient and necessary condition for the stability of the method so that, in order to have a stable method, the spectral radius of the matrix must be less than one (, where is a spectral radius of ).
3.2. Convergence Analysis
Assume that
. Subtracting (
12) from (
15) and using the notations in the previous section, one can write after some simplification
where
and
. Due to invertibility of matrix
[
11], it is obvious that
and
are finite. Therefore, we have
It follows from (
6) that
and
are bounded
Note that
plays an important role in the structure of
and
B. Thus, the value of the variables
and
will change when the value of
changes. These variables play a direct role in the error presented in (
27).
We know that a method is consistent if, by reducing the mesh (by increase the refinement level
J) and time step size (
), the truncation error terms could be made to approach zero. Consequently, the inequality (
27) confirms that the method is consistent at every time step when the refinement level J or multiplicity r increases.
If the condition for stability holds (
) and if, for the Galerkin method, used for solving the ordinary differential equation at each time, the overall error approaches zero as
(indeed, the method is consistent), we usually find that the solution converges to the exact solution. This derives from the Lax Equivalence Theorem [
17].
4. Numerical Results
To illustrate the validity of stability, consistency, and convergence analysis, some numerical tests have been considered in this section.
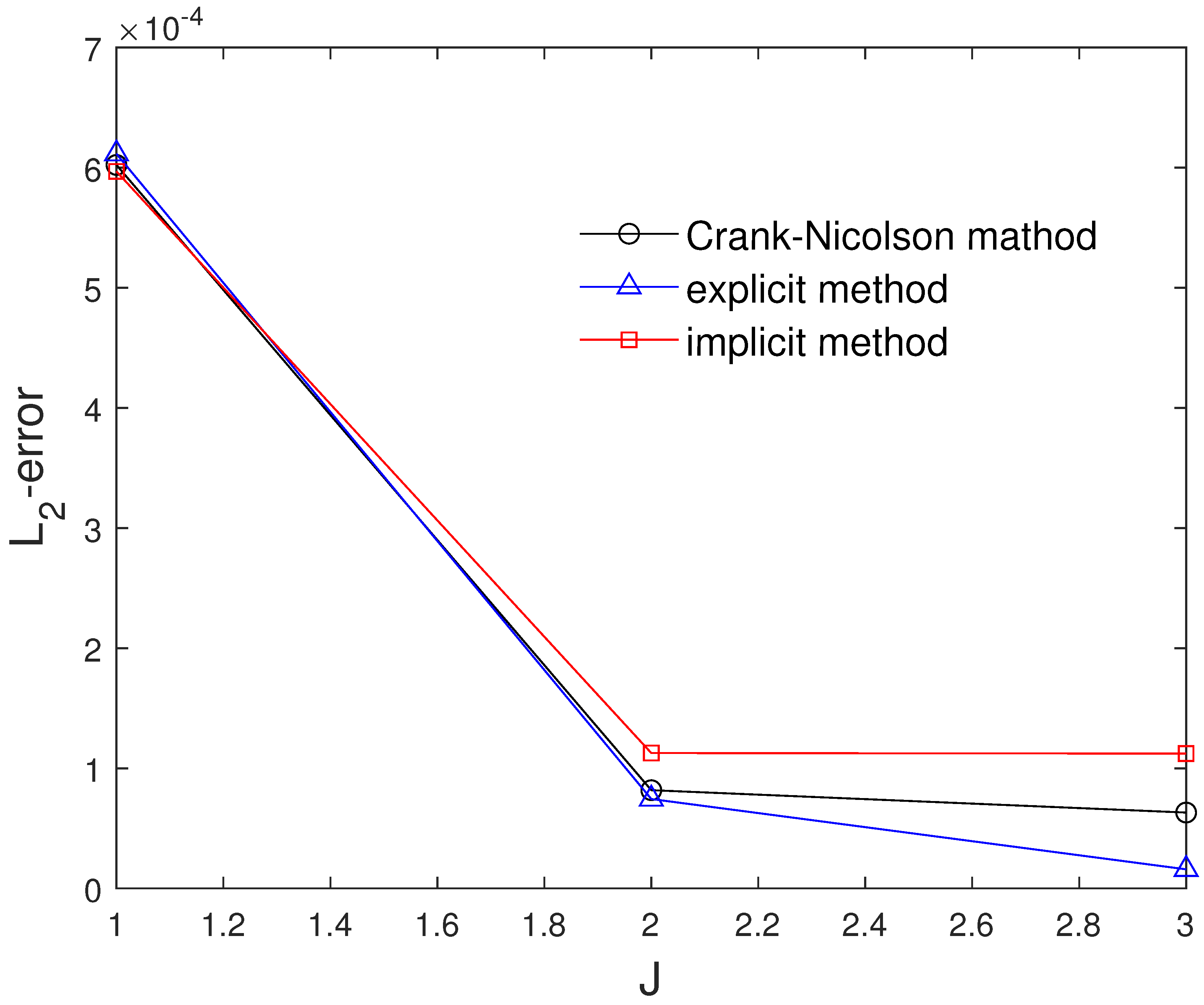
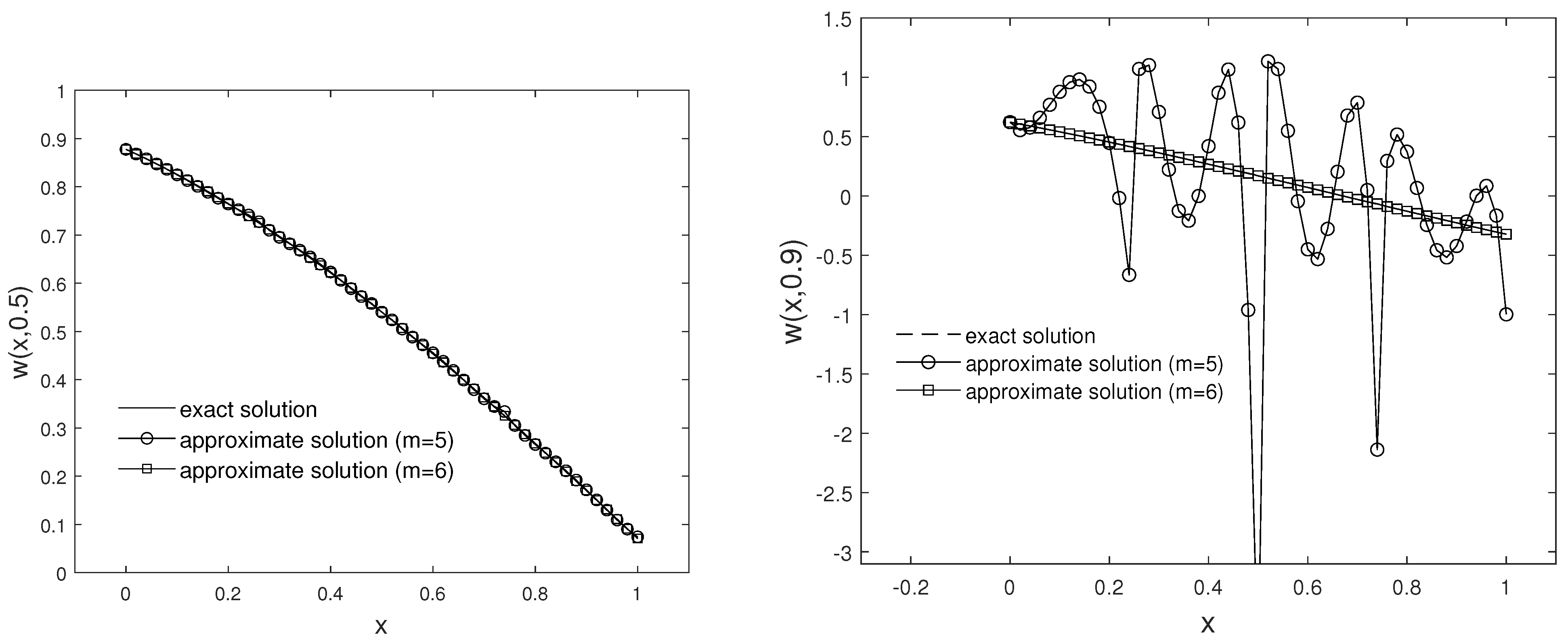
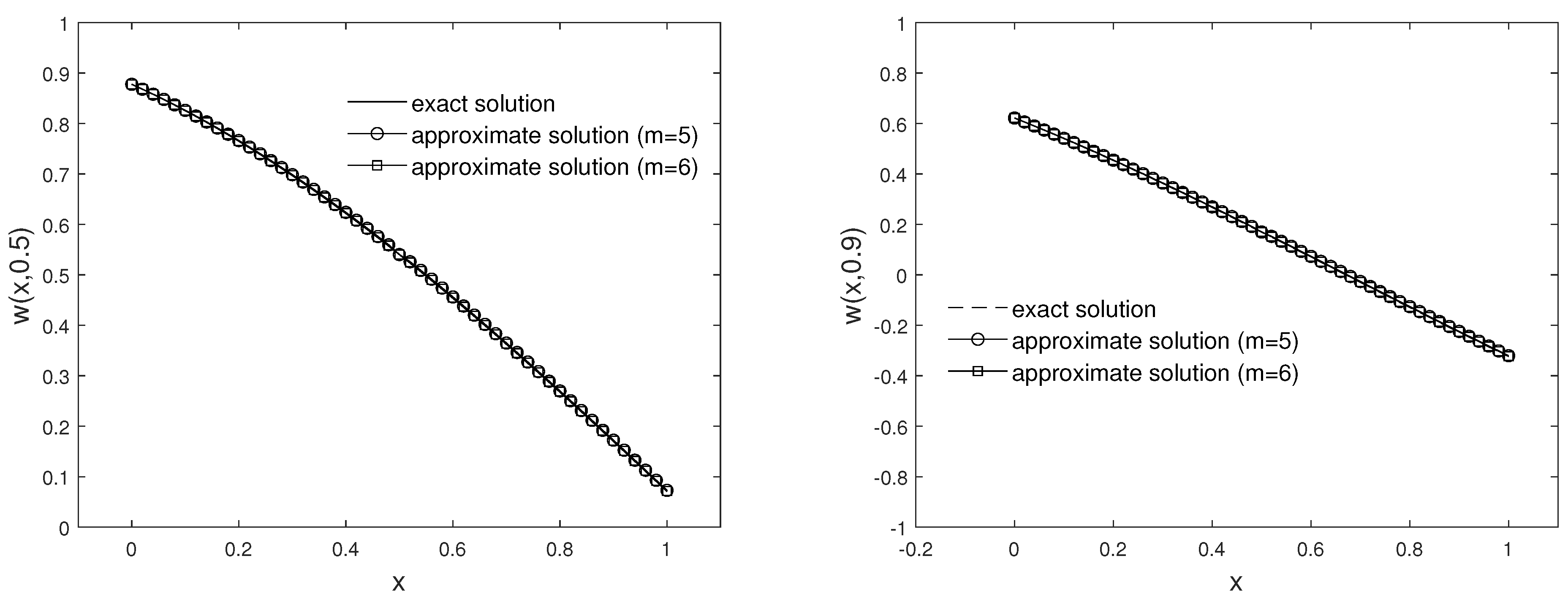
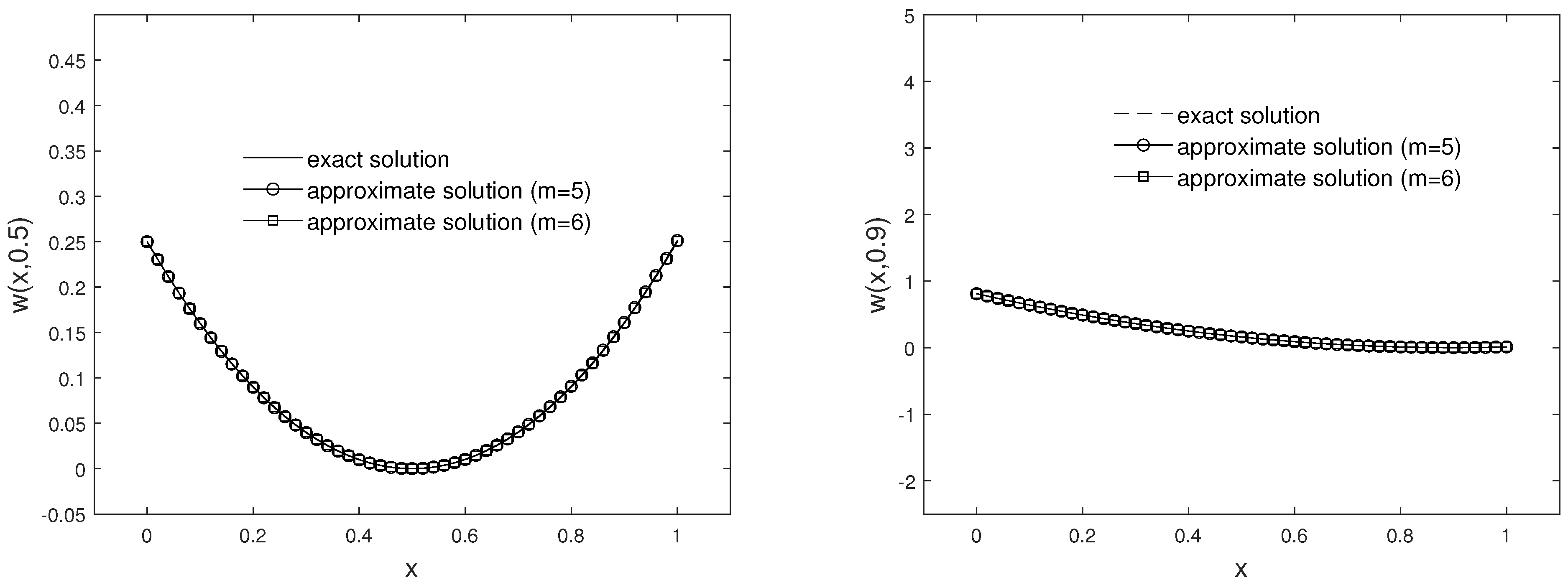
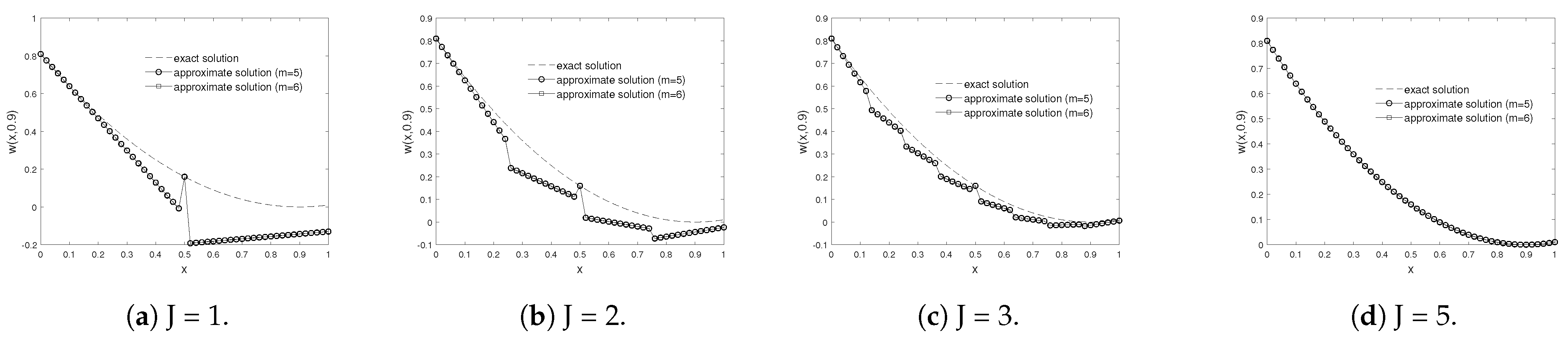
Example 1. Let us dedicate the first example to the case that the desired Equation (1) is of formwith boundary and initial conditions One can find the exact solution that is reported in [6] Table 1 describes the comparison of -error via explicit, implicit and Crank–Nicolson methods with time step size , . It is quite obvious that the error tends to zero with increasing m. Table 2 consists of norm of Example 1 at different values of time. The -error graph of the explicit, implicit, and Crank–Nicolson methods taking different values for J when are shown in Figure 1. Figure 2 illustrates the approximate solution and absolute error taking and at time . Table 3 displays absolute values of the error at the selected points by using the presented method taking , , and . The results have been compared with the Legendre wavelets and Chebyshev wavelet collocation method [7], and also Bernoulli matrix approach [18]. To confirm the stability condition that we obtained in Section 3.1, Figure 3 and Figure 4 and Table 4 are considered. One can observe that when the spectral radius of matrix is less than 1, the proposed method is stable. In view of Figure 3 and Figure 4, the explicit method at becomes stable while the Crank–Nicolson method is stable from . We have the same result for the implicit method . Example 2. As the second example, let us consider the HPDEs (1) so that , andwith boundary and initial conditions given by For this example, we have the exact solution [7] Table 5 shows the comparison of -error via explicit, implicit and Crank–Nicolson methods with time step size , , and . Table 6 consists of norm of Example 2 at different values of time. Figure 5 illustrates the approximate solution and absolute error taking and at time . Figure 6 shows the -error using explicit method and implicit method taking and at time , . Figure 7, Figure 8 and Figure 9 confirm our investigation about stability. According to stability investigation, if the spectral radius of matrix is not less than 1, then the time discretization leads to divergence when t increases. To reduce this effect, we must increase the time steps. In Table 7 the results have been compared with the Legendre wavelets and Chebyshev wavelet collocation method [7]. It shows that the proposed method offers better accuracy using the same multiplicity parameter r and refinement level J. In Figure 10, we show the effect of refinement level J and time step size on absolute error. In addition, this figure confirms our investigation about consistency. 5. Conclusions
This work is devoted to solving the one-dimensional partial differential equation with boundary and initial conditions. To this end, the desired equation reduces to an ordinary differential equation using the -weighted method. This ODE is solved by employing the Galerkin method based on the interpolating scaling functions. The stability, consistency, and convergency of the method are investigated. The numerical examples are reported to illustrate the accuracy and efficiency of the method. The results show that three parameters are important here: the parameter that changes the -weighted method, the parameter that controls the time steps, and the refinement level J. The results show that, using the proposed method, better results are obtained compared to similar methods. Among the methods utilized in this paper, the implicit and Crank–Nicolson methods are stable methods that need fewer steps than the explicit method to achieve proper accuracy.
Author Contributions
Conceptualization, H.B.J.; methodology, software, H.B.J. and F.T.; validation, formal analysis, H.B.J. and F.T.; writing—original draft preparation, investigation, funding acquisition, H.B.J. and F.T.; writing—review and editing, H.B.J. and F.T. Both authors have read and agreed to the published version of the manuscript.
Funding
The authors extend their appreciation to the Deanship of Scientific Research at King Saud University for funding this work through research group No. RG-1441-326.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We thank the reviewer for his/her thorough review and highly appreciate the comments and suggestions, which significantly contributed to improving the quality of the publication.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| HPDE | Hyperbolic partial differential equations |
| ISFs | Interpolating scaling functions |
| PDEs | Partial differential equations |
| ODE | Ordinary differential equation |
References
- Dehghan, M. A computational study of the one-dimensional parabolic equation subject to nonclassical boundary specifications. Numer. Methods Partial Differ. Equ. 2006, 22, 220–257. [Google Scholar] [CrossRef]
- Dehghan, M.; Shokri, A. A numerical method for solving the hyperbolic telegraph equation. Numer. Methods Partial Differ. Equ. 2008, 24, 1080–1093. [Google Scholar] [CrossRef]
- Lakestani, M.; Saray, B.N. Numerical solution of telegraph equation using interpolating scaling functions. Comput. Math. Appl. 2010, 60, 1964–1972. [Google Scholar] [CrossRef]
- Jebreen, H.B.; Cano, Y.C.; Dassios, I. An efficient algorithm based on the multi-wavelet Galerkin method for telegraph equation. AIMS Math. 2021, 6, 1296–1308. [Google Scholar] [CrossRef]
- Doha, E.H.; Bhrawy, A.H.; Hafez, R.M.; Abdelkawy, M.A. A Chebyshev–Gauss-Radau scheme for nonlinear hyperbolic system of first order. Appl. Math. Inf. Sci. 2014, 8, 535–544. [Google Scholar] [CrossRef]
- Doha, E.H.; Hafez, R.M.; Youssri, Y.H. Shifted Jacobi spectral-Galerkin method for solving hyperbolic partial differential equations. Comput. Math. Appl. 2019, 78, 889–904. [Google Scholar] [CrossRef]
- Singh, S.; Patel, V.K.; Singh, V.K. Application of wavelet collocation method for hyperbolic partial differential equations via matrices. Appl. Math. Comput. 2018, 320, 407–424. [Google Scholar] [CrossRef]
- Dehghan, M.; Lakesatani, M. The Use of Cubic B-Spline Scaling Functions for Solving the One-dimensional Hyperbolic Equation with a Nonlocal Conservation Condition. Numer. Methods Partial Differ. Equ. 2007, 23, 1277–1289. [Google Scholar] [CrossRef]
- Bougoffa, L. An efficient method for solving nonlocal initial-boundary value problems for linear and nonlinear first-order hyperbolic partial differential equations. J. Appl. Math. Comput. 2013, 43, 31–54. [Google Scholar] [CrossRef]
- Saadatmandi, A.; Dehghan, M. Numerical solution of hyperbolic telegraph equation using the Chebyshev Tau method. Numer. Methods Partial Differ. Equ. 2010, 26, 239–252. [Google Scholar] [CrossRef]
- Alpert, B.; Beylkin, G.; Gines, D.; Vozovoi, L. Adaptive solution of partial differential equations in multiwavelet bases. J. Comput. Phys. 2002, 182, 149–190. [Google Scholar] [CrossRef]
- Saray, B.N. Sparse multiscale representation of Galerkin method for solving linear-mixed Volterra-Fredholm integral equations. Math. Methods Appl. Sci. 2020, 43, 2601–2614. [Google Scholar] [CrossRef]
- Alpert, B.; Beylkin, G.; Coifman, R.R.; Rokhlin, V. Wavelet-like bases for the fast solution of second-kind integral equations. SIAM J. Sci. Statist. Comput. 1993, 14, 159–184. [Google Scholar] [CrossRef]
- Seyedi, S.H.; Saray, B.N.; Ramazani, A. High-Accuracy Multiscale Simulation of Three-Dimensional Squeezing Carbon Nanotube-Based Flow inside a Rotating Stretching Channel. Math. Prob. Eng. 2019, 2019, 9890626. [Google Scholar] [CrossRef]
- Saray, B.N.; Manafian, J. Sparse representation of delay differential equation of pantograph type using multiwavelets Galerkin method. Eng. Comput. 2018, 35, 887–903. [Google Scholar] [CrossRef]
- Shahriari, M.; Saray, B.N.; Lakestani, M.; Manafian, J. Numerical treatment of the Benjamin-Bona-Mahony equation using Alpert multiwavelets. Eur. Phys. J. Plus 2018, 133, 201. [Google Scholar] [CrossRef]
- Morton, K.W.; Mayers, D.F. Numerical Solution of Partial Differential Equations an Introduction, 2nd ed.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2005. [Google Scholar]
- Tohidi, E.; Toutounian, F. Convergence analysis of Bernoulli matrix approach for one-dimensional matrix hyperbolic equations of the first order. Comput. Math. Appl. 2014, 68, 1–12. [Google Scholar] [CrossRef]
Figure 1.
Plot of –errors at time taking and for Example 1.
Figure 1.
Plot of –errors at time taking and for Example 1.
Figure 2.
Plot of the approximate solution (left) and errors (right) taking and for Example 1.
Figure 2.
Plot of the approximate solution (left) and errors (right) taking and for Example 1.
Figure 3.
Plot of exact and approximate solutions at time and taking , , and for Example 1.
Figure 3.
Plot of exact and approximate solutions at time and taking , , and for Example 1.
Figure 4.
Plot of exact and approximate solutions at time and taking , , and for Example 1.
Figure 4.
Plot of exact and approximate solutions at time and taking , , and for Example 1.
Figure 5.
Plot of the approximate solution (left) and errors (right) taking and for Example 2.
Figure 5.
Plot of the approximate solution (left) and errors (right) taking and for Example 2.
Figure 6.
—error using explicit method (left) and implicit error (right) taking and at time for Example 2.
Figure 6.
—error using explicit method (left) and implicit error (right) taking and at time for Example 2.
Figure 7.
Plot of exact and approximate solutions at time and taking , , and for Example 2.
Figure 7.
Plot of exact and approximate solutions at time and taking , , and for Example 2.
Figure 8.
Plot of exact and approximate solutions at time and taking , , and for Example 2.
Figure 8.
Plot of exact and approximate solutions at time and taking , , and for Example 2.
Figure 9.
Plot of exact and approximate solutions at time and taking , , and for Example 2.
Figure 9.
Plot of exact and approximate solutions at time and taking , , and for Example 2.
Figure 10.
Effect of the refinement level J and on the absolute error for Example 2.
Figure 10.
Effect of the refinement level J and on the absolute error for Example 2.
Table 1.
Comparison of –error computed using explicit, implicit and Crank–Nicolson methods with time step size for Example 1.
Table 1.
Comparison of –error computed using explicit, implicit and Crank–Nicolson methods with time step size for Example 1.
| | | | | | | | | | |
|---|
| 0 | | | | | | | | | | |
| | | | | | | | | | |
| 1 | | | | | | | | | | |
Table 2.
norm of errors taking , , and for Example 1.
Table 2.
norm of errors taking , , and for Example 1.
| m | | | | | |
|---|
| 2 | | | | | |
| 4 | | | | | |
| 6 | | | | | |
| 8 | | | | | |
| 10 | | | | | |
Table 3.
Absolute values of the error at the selected points taking and for Example 1.
Table 3.
Absolute values of the error at the selected points taking and for Example 1.
| | Reference [7] | Reference [18] | Proposed Method |
|---|
| Legendre Wavelets | Chebyshev Wavelet | | |
|---|
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
| | | | |
Table 4.
norm of errors taking , , and for Example 1.
Table 4.
norm of errors taking , , and for Example 1.
| m | | | |
|---|
| 1 | | | |
| 2 | | | |
| 3 | | | |
| 4 | | | |
| 5 | | | |
| 6 | | | |
| 7 | | | |
| 8 | | | |
| 9 | | | |
| 10 | | | |
Table 5.
–error comparison among explicit, implicit, and Crank–Nicolson methods with time step size for Example 2.
Table 5.
–error comparison among explicit, implicit, and Crank–Nicolson methods with time step size for Example 2.
| | | | | | | | | | |
|---|
| 0 | | | | | | | | | | |
| | | | | | | | | | |
| 1 | | | | | | | | | | |
Table 6.
norm of errors taking , , and for Example 2.
Table 6.
norm of errors taking , , and for Example 2.
| m | | | | | |
|---|
| 2 | | | | | |
| 4 | | | | | |
| 6 | | | | | |
| 8 | | | | | |
| 10 | | | | | |
Table 7.
Absolute values of the error at the selected points taking and for Example 2.
Table 7.
Absolute values of the error at the selected points taking and for Example 2.
| | Reference [7] | Proposed Method |
|---|
| Legendre Wavelets | Chebyshev Wavelet | |
|---|
| | | |
| | | |
| | | |
| | | |
| | | |
| | | |
| | | |
| | | |
| | | |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}