Investigation of a Multitasking System for Automatic Ship Berthing in Marine Practice Based on an Integrated Neural Controller


Abstract
1. Introduction
- The multitasking system for automatic ship berthing is proposed based on an integrated neural controller to carry out different tasks without retraining the neural network structure.
- The ship can be automatically controlled by the proposed system to berth in different terminals as well as different ports.
- The proposed system can control the ship into the berth on each side of ship in the original port as well as different ports.
- Compared to other approaches, the proposed system is applicable for marine practices because the ANN has the ability to learn and perform the berthing stages as a human brain.
2. Preliminaries and Coordinate Systems
2.1. Kinematic Model
2.2. Ship Dynamic Model
2.3. Dynamic Feature in Ship Turning
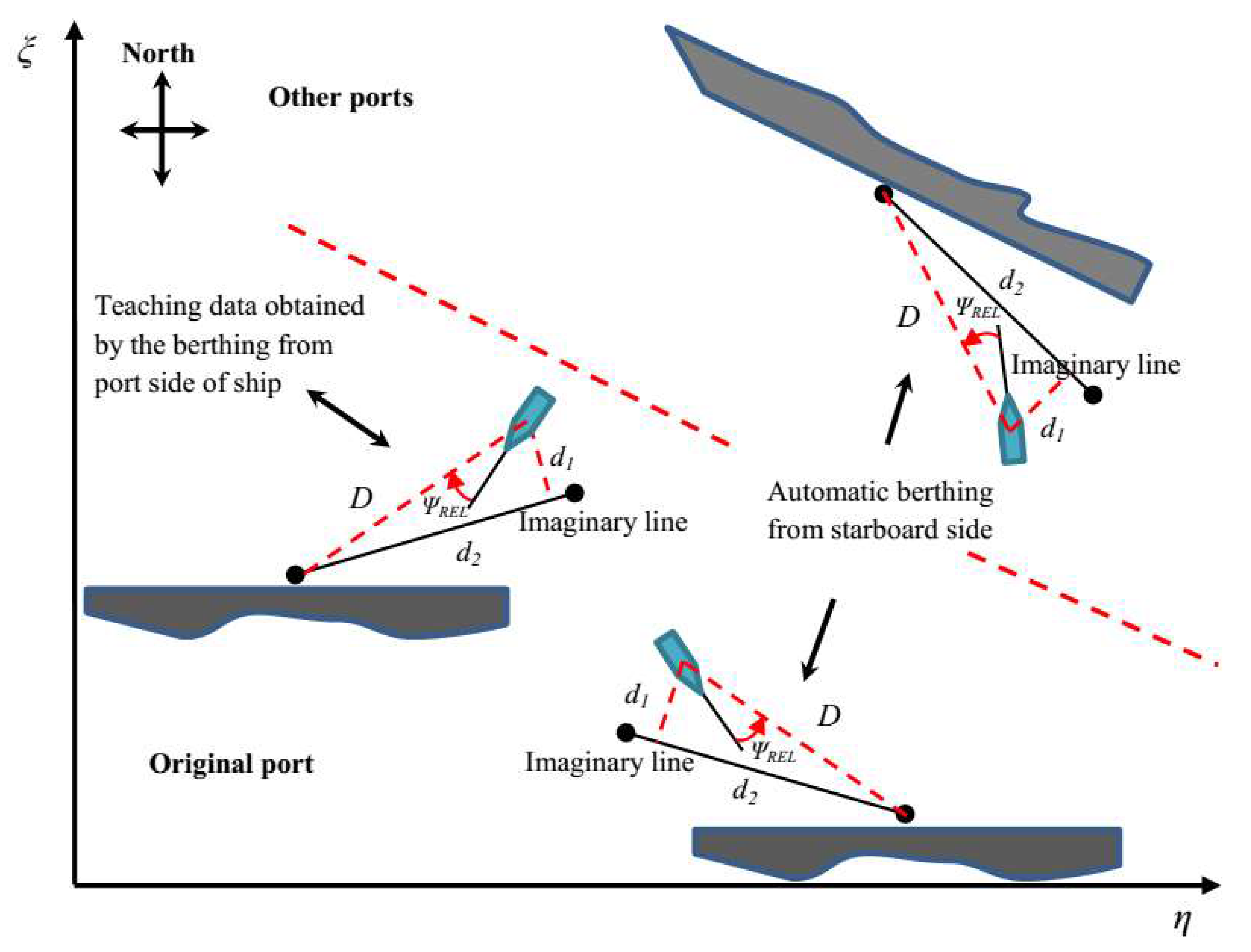
2.4. Head-Up Coordinate System
3. Multitasking System for Ship Berthing Based on an Integrated Neural Controller
3.1. Concept of a Multitasking Ship Berthing System Based on ANN
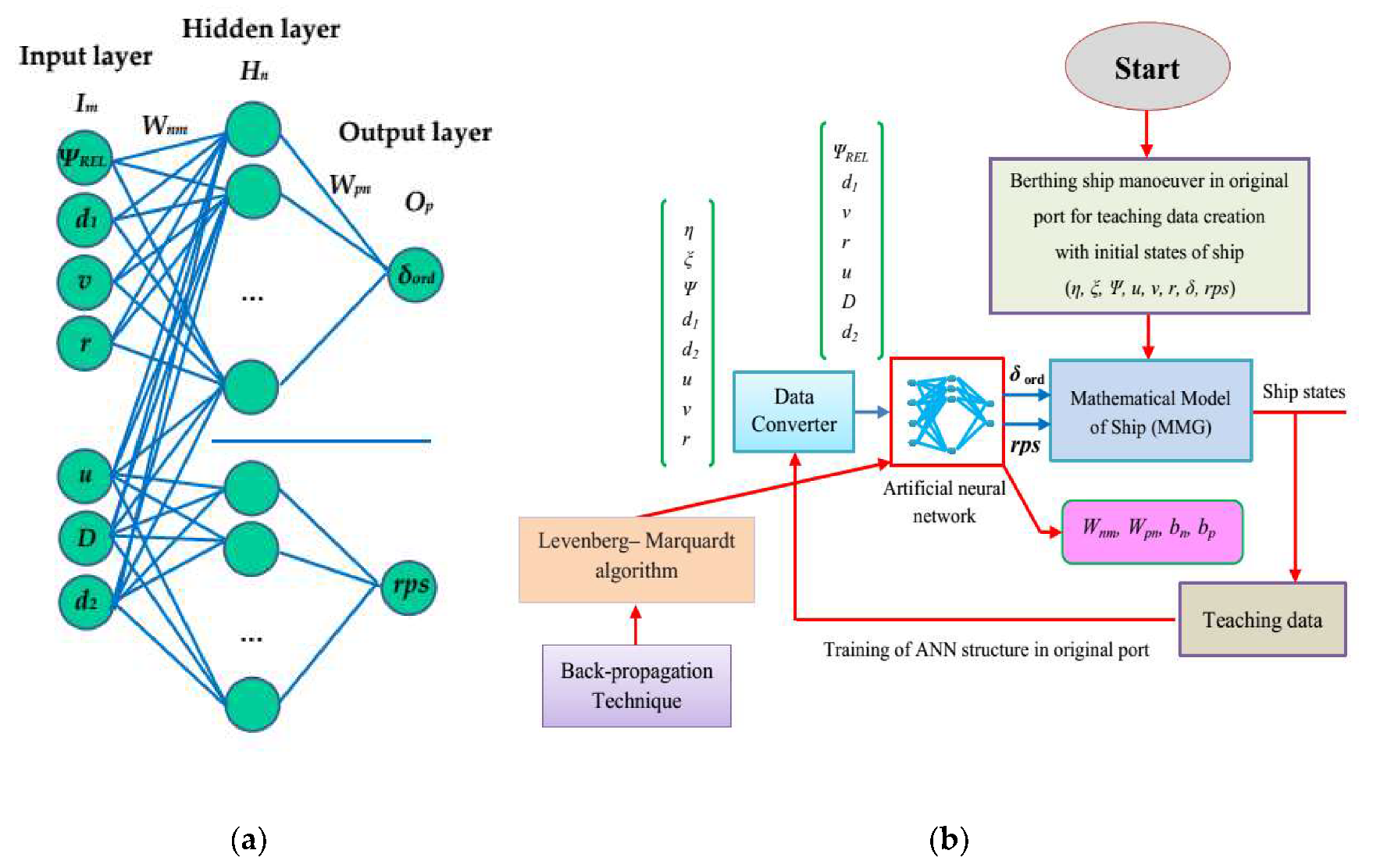
3.2. Artificial Neural Network Trained by Teaching Data in the Original Port
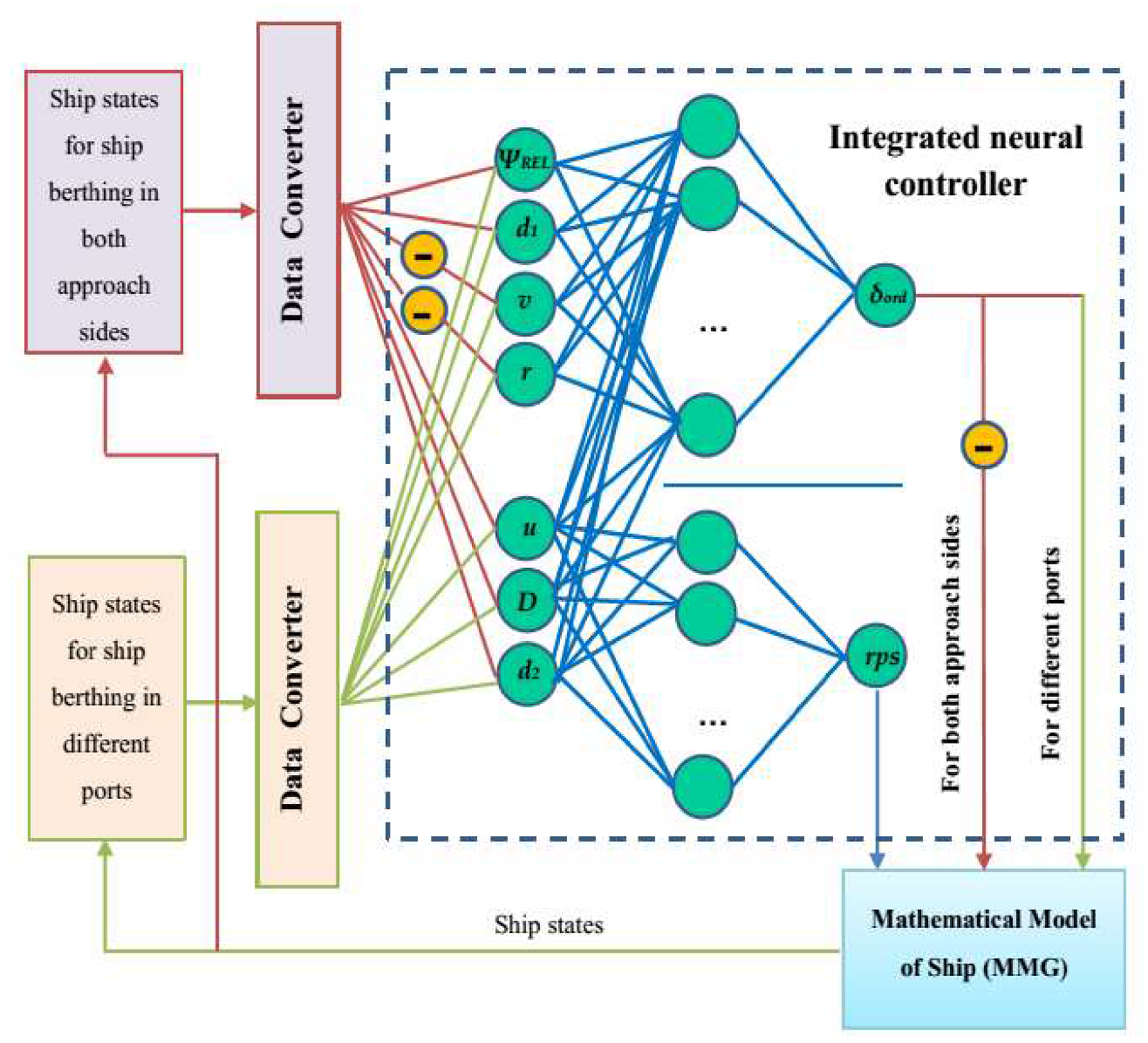
3.3. Integrated Neural Controller
4. Numerical Simulation and Result
4.1. Teaching Data Generation and Training of ANN in the Original Port
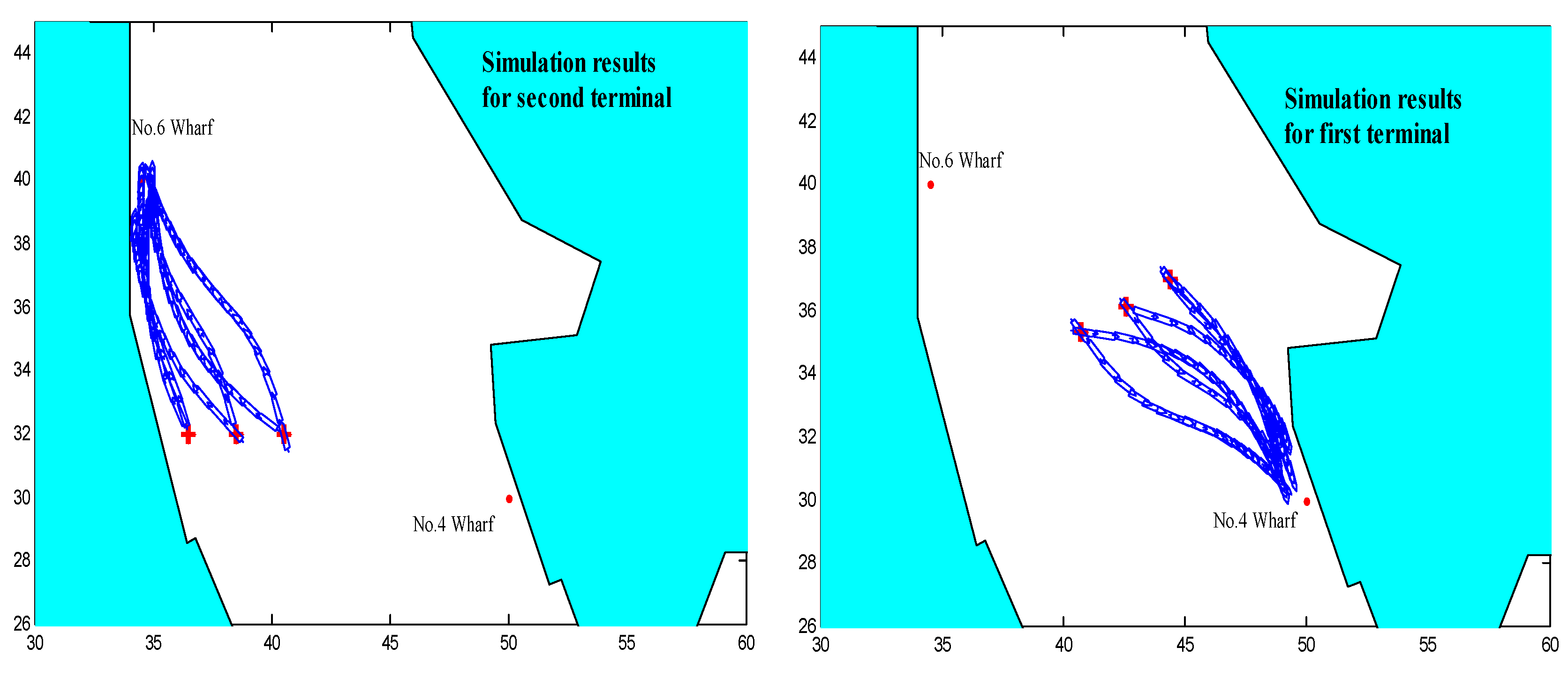
4.2. Verification of the Integrated Neural Controller for the Original Port and Different Ports
4.3. Verification of Integrated Neural Controller for Berth Approaching on Each Side
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| Wnm | Weight on the link from node n to node m |
| Wpn | Weight on the link from node p to node n |
| bn | Threshold of hidden layer (Hn) |
| bp | Threshold of output layer (Op) |
| L | Ship length between perpendiculars |
| B | Breath of a ship |
| d | Draft of ship |
| ρ | Water density |
| U | Total speed of ship |
| u, v, r | Surge, sway and yaw velocity of ship |
| δ | Rudder angle of ship |
| δord | Control signal for rudder angle of ship |
| rps(n) | Revolution speed of propeller |
| D | Distance from ship to berth |
| d¬1 | Distance from ship to berth |
| d2 | Distance from ship to imagination line |
| Ψ | Ship heading |
| ΨREL | Relative bearing from ship to berth |
| β | Drift angle of ship |
| m | Mass of ship |
| mx | Added mass in surge direction |
| my | Added mass in sway direction |
| Izz | Mass moment of inertia |
| J | Propeller advanced ratio |
| Jzz | Added mass moment of inertia |
| tP | Effective thrust deduction factor by rudder to rudder normal force |
| AR | Profile area of moveable part of rudder |
| T | Propeller thrust force |
| KT(J) | Thrust coefficient of the propeller |
| Dp | Propeller diameter |
| aH | Ratio of lateral force induced on hull by rudder to rudder normal force |
| tR | Steering resistance deduction factor |
| UR | Longitudinal inflow velocity component |
| XH, YH, NH | Hydrodynamic forces and moment acting on the hull of ship |
| XR, YR, NR | Hydrodynamic forces and moment acting on the ship’s rudder |
| XP | Hydrodynamic force acting on propeller |
| FN | Rudder normal force |
| fα (Λ) | Rudder lift gradient coefficient |
| xH | Longitudinal coordinate of point of the additional lateral force |
References
- Yamato, H.; Koyama, T.; Uetsaki, H. Automatic Berthing by the Neural Controller. In Proceedings of the Ninth Ship Control Systems Symposium, Maryland Bethesda, MD, USA, 10–14 September 1990; Volume 3, pp. 183–201. [Google Scholar]
- Yamato, H.; Koyama, T.; Nakagawa, T. Automatic Berthing Using the Expert System. IFAC Proc. Vol. 1992, 25, 173–184. [Google Scholar] [CrossRef]
- Zhang, Y. Neural Network Approaches to a Class of Ship Control Problems (Part I, II). In Proceedings of the Eleventh Ship Control Systems Symposium, Southampton, UK, 14–19 April 1997; Wilson, P.A., Ed.; Volume 1, pp. 115–150. [Google Scholar]
- Im, N.K.; Hasegawa, K. A study on automatic ship berthing using parallel neural controller. J. Kansai Soc. Nav. Archit. Jpn. 2001, 236, 65–70. [Google Scholar]
- Im, N.K.; Hasegawa, K. Motion identification using neural networks and its application to automatic ship berthing under wind. J. Ship. Ocean Eng. Jpn. 2002, 11, 16–26. [Google Scholar]
- Im, N.K.; Lee, S.K.; Hyung, D.B. An application of ANN to automatic ship berthing using selective controller. Int. J. Mar. Navig. Saf. Sea Transp. 2007, 1, 101–105. [Google Scholar]
- Nguyen, P.-H.; Jung, Y.-C. Automatic Berthing Control of Ship Using Adaptive Neural Networks. J. Korean Navig. Port Res. 2007, 31, 563–568. [Google Scholar] [CrossRef][Green Version]
- Ahmed, Y.A.; Hasegawa, K. Automatic Ship Berthing using Artificial Neural Network Based on Virtual Window Concept in Wind Condition. IFAC Proc. Vol. 2012, 45, 286–291. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Automatic ship berthing using artificial neural network trained by consistent teaching data using nonlinear programming method. Eng. Appl. Artif. Intell. 2013, 26, 2287–2304. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Experiment Results for Automatic Ship Berthing using Artificial Neural Network Based Controller. IFAC Proc. Vol. 2014, 47, 2658–2663. [Google Scholar] [CrossRef]
- Im, N.-K.; Nguyen, V.S. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Arch. Ocean Eng. 2018, 10, 235–249. [Google Scholar] [CrossRef]
- Nguyen, V.S.; Do, V.-C.; Im, N. Development of Automatic Ship Berthing System Using Artificial Neural Network and Distance Measurement System. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 41–49. [Google Scholar] [CrossRef]
- Zhang, Q.; Guibing, Z.; Xin, H.; Renming, Y. Adaptive neural network auto-berthing control of marine ships. Ocean Eng. 2019, 177, 40–48. [Google Scholar] [CrossRef]
- Shuai, Y.; Li, G.; Cheng, X.; Skulstad, R.; Xu, J.; Liu, H.; Zhang, H. An efficient neural-network based approach to automatic ship docking. Ocean Eng. 2019, 191, 106514. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S.-J.; Seo, Y.-J. Application of Recent Developments in Deep Learning to ANN-based Automatic Berthing Systems. Int. J. Eng. Technol. Innov. 2020, 10, 75–90. [Google Scholar] [CrossRef]
- Tran, V.L.; Im, N. A study on ship automatic berthing with assistance of auxiliary devices. Int. J. Nav. Arch. Ocean Eng. 2012, 4, 199–210. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hasegawa, K. Artificial neural network based automatic ship berthing combining PD controlled side thrusters—A combined controller for final approaching to berth. In Proceedings of the 13th International Conference on Control Automation Robotics and Vision, Singapore, 10–12 December 2014. [Google Scholar]
- Park, J.-Y.; Kim, N. Design of an adaptive backstepping controller for auto-berthing a cruise ship under wind loads. Int. J. Nav. Arch. Ocean Eng. 2014, 6, 347–360. [Google Scholar] [CrossRef]
- Nguyen, V.S. Investigation on a Novel Support System for Automatic Ship Berthing in Marine Practice. J. Mar. Sci. Eng. 2019, 7, 114. [Google Scholar] [CrossRef]
- Nguyen, V.-S.; Im, N. Automatic Ship Berthing Based on Fuzzy Logic. Int. J. Fuzzy Log. Intell. Syst. 2019, 19, 163–171. [Google Scholar] [CrossRef]
- Bui, V.P.; Kim, Y.B.; Jang, J.S. Design of sliding mode controller for ship berthing. In Proceedings of the 11th International Conference on Control, Automation and Systems, Vienna, Austria, 1–3 September 2014. [Google Scholar]
- Mizuno, N.; Kakami, H.; Okazaki, T. Parallel Simulation Based Predictive Control Scheme with Application to Approaching Control for Automatic Berthing. IFAC Proc. Vol. 2012, 45, 19–24. [Google Scholar] [CrossRef]
- Li, S.; Liu, J.; Negenborn, R.R.; Wu, Q. Automatic Docking for Underactuated Ships Based on Multi-Objective Nonlinear Model Predictive Control. IEEE Access 2020, 8, 70044–70057. [Google Scholar] [CrossRef]
- Mizuno, N.; Uchida, Y.; Okazaki, T. Quasi Real-Time Optimal Control Scheme for Automatic Berthing. IFAC PapersOnLine 2015, 48, 305–312. [Google Scholar] [CrossRef]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Nishikawa, H.; Umeda, N. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing. J. Mar. Sci. Technol. 2019, 25, 221–233. [Google Scholar] [CrossRef]
- Liao, Y.; Jia, Z.; Zhang, W.; Jia, Q.; Li, Y. Layered berthing method and experiment of unmanned surface vehicle based on multiple constraints analysis. Appl. Ocean Res. 2019, 86, 47–60. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Kijima, K. On the maneuvering performance of a ship with the parameter of loading condition. J. Soc. Nav. Archit. Jpn. 1990, 168, 141–148. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Training Ship |
|---|---|
| Length Overall | 103 [m] |
| Length between perpendiculars | 94 [m] |
| Breadth | 15.6 [m] |
| Draft | 5.4 [m] |
| Thruster (Bow) | 49,000 [N] |
| Coefficient | Value | Coefficient | Value |
|---|---|---|---|
| −0.5012 | −0.3561 | ||
| 0.183 | 0.1379 | ||
| 0.2496 | −0.0488 | ||
| 0.0542 | −0.0782 | ||
| 0.8755 | −0.0430 | ||
| −0.0028 | −0.0480 | ||
| 0.8937 | −0.3789 |
| Type | Details |
|---|---|
| Type of neural network | Multi-Layer Perception (MLP) |
| Training technique | Back-propagation |
| Training function | Levenberg–Marquardt algorithm |
| Number of layers | 01 Input layer, 01 Hidden layer, 01 Output layer |
| Number of Inputs | 07, Im = [ΨREL, d1, v, r, u, D, d2]T |
| Number of Outputs | 02, Op = [δord, rps]T |
| Number of hidden layer | 21 nodes |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, V.S. Investigation of a Multitasking System for Automatic Ship Berthing in Marine Practice Based on an Integrated Neural Controller. Mathematics 2020, 8, 1167. https://doi.org/10.3390/math8071167
Nguyen VS. Investigation of a Multitasking System for Automatic Ship Berthing in Marine Practice Based on an Integrated Neural Controller. Mathematics. 2020; 8(7):1167. https://doi.org/10.3390/math8071167
Chicago/Turabian StyleNguyen, Van Suong. 2020. "Investigation of a Multitasking System for Automatic Ship Berthing in Marine Practice Based on an Integrated Neural Controller" Mathematics 8, no. 7: 1167. https://doi.org/10.3390/math8071167
APA StyleNguyen, V. S. (2020). Investigation of a Multitasking System for Automatic Ship Berthing in Marine Practice Based on an Integrated Neural Controller. Mathematics, 8(7), 1167. https://doi.org/10.3390/math8071167