Wave-Structure Interaction for a Stationary Surface-Piercing Body Based on a Novel Meshless Scheme with the Generalized Finite Difference Method

 , ,
, ,  ,
,
Abstract
1. Introduction
2. Governing Equations and Boundary Conditions
2.1. Governing Equations
2.2. Impermeable and Free-Surface Boundary Condition
2.3. Wave-Generating Boundary Condition
2.4. Wave-Absorbing Boundary Condition
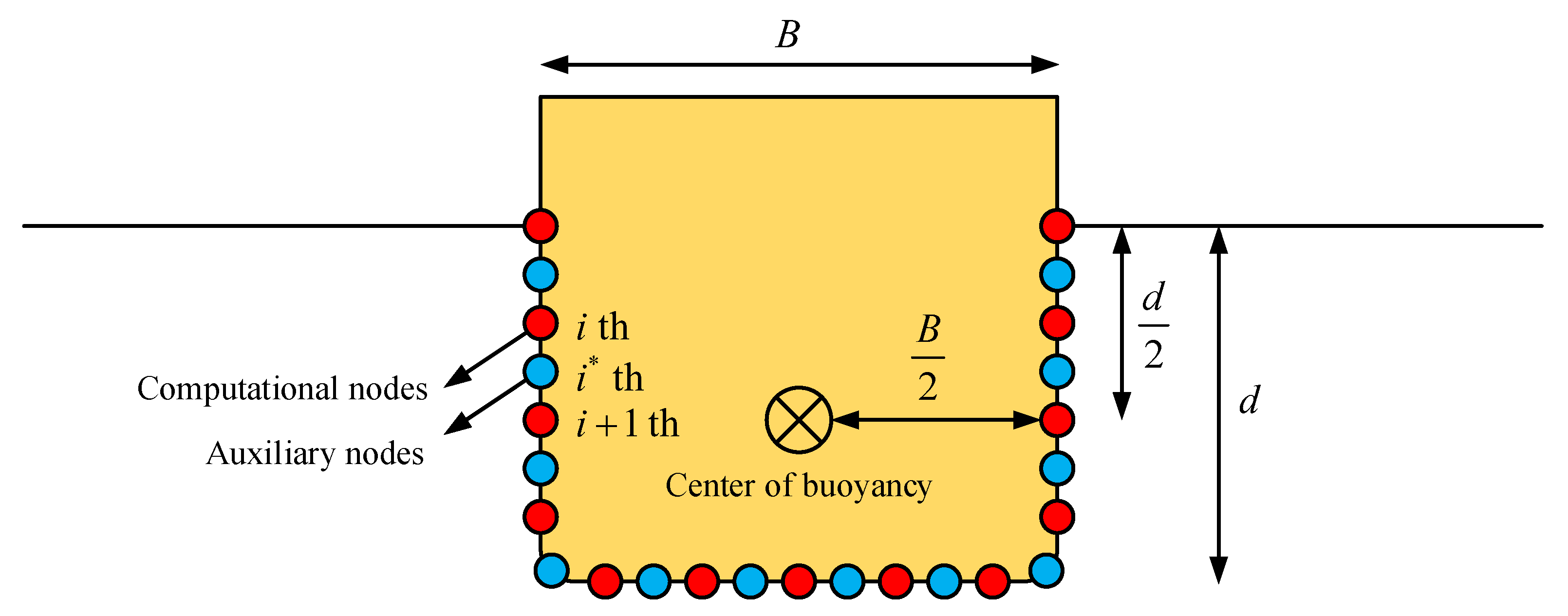
2.5. Hydrodynamics Load of Stationary Structure
3. Numerical Methods
3.1. Temporal Discretization
3.2. Spatial Discretization
4. Numerical Results and Discussion
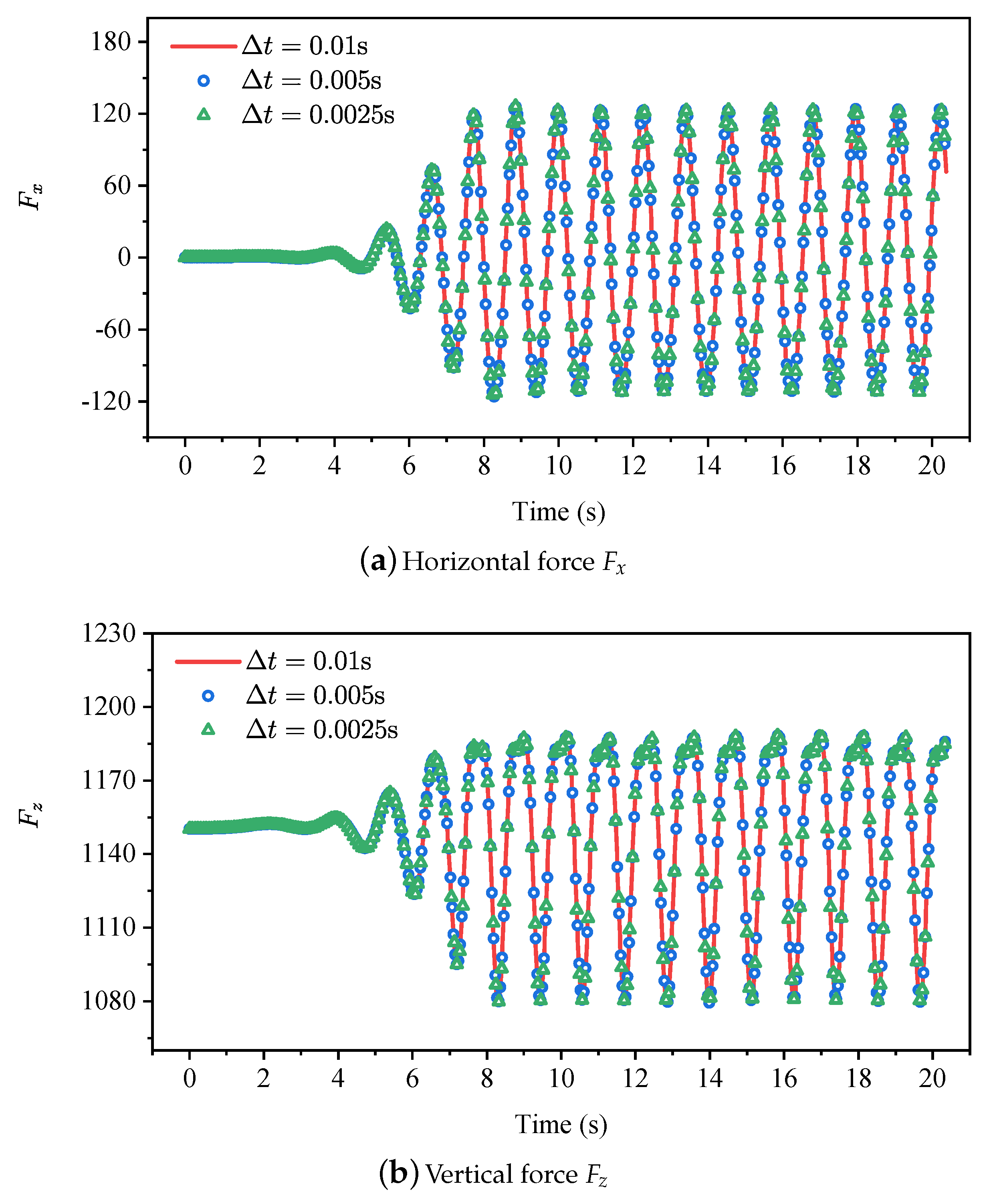
4.1. Independence Validations
4.2. Hydrodynamic Loads
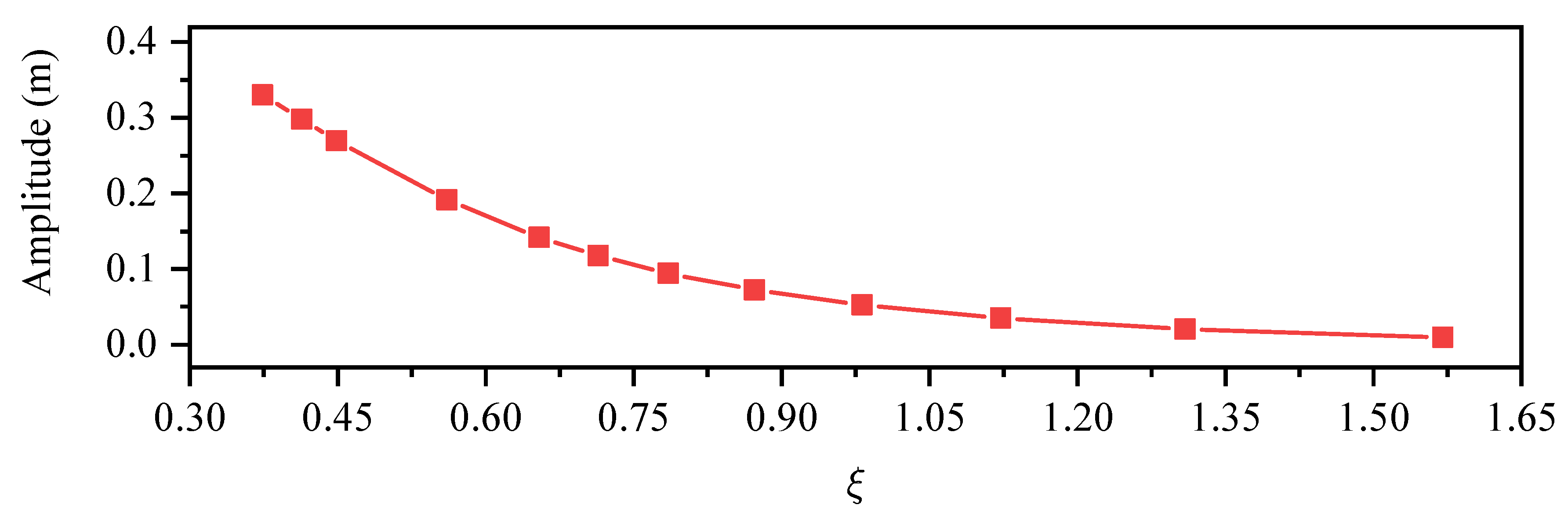
4.3. Transmitted Wave
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dai, J.; Wang, C.M.; Utsunomiya, T.; Duan, W. Review of recent research and developments on floating breakwaters. Ocean Eng. 2018, 158, 132–151. [Google Scholar] [CrossRef]
- Guo, Y.; Mohapatra, S.; Soares, C.G. Review of developments in porous membranes and net-type structures for breakwaters and fish cages. Ocean Eng. 2020, 200, 107027. [Google Scholar] [CrossRef]
- Zhao, X.; Ning, D.; Zou, Q.; Qiao, D.; Cai, S. Hybrid floating breakwater-WEC system: A review. Ocean Eng. 2019, 186, 106126. [Google Scholar] [CrossRef]
- Liu, C.S. A modified Trefftz method for two-dimensional Laplace equation considering the domain’s characteristic length. Comput. Model. Eng. Sci. 2007, 21, 53–65. [Google Scholar]
- Liu, C.S. An effectively modified direct Trefftz method for 2D potential problems considering the domain’s characteristic length. Eng. Anal. Bound. Elem. 2007, 31, 983–993. [Google Scholar] [CrossRef]
- Chen, J.T.; Wu, C.S.; Lee, Y.T.; Chen, K.H. On the equivalence of the Trefftz method and method of fundamental solutions for Laplace and biharmonic equations. Comput. Math. Appl. 2007, 53, 851–879. [Google Scholar] [CrossRef]
- Li, Z.C.; Lu, T.T.; Huang, H.T.; Cheng, A.H.D. Trefftz, collocation, and other boundary methods—A comparison. Numer. Methods Partial Differ. Equ. 2007, 23, 93–144. [Google Scholar] [CrossRef]
- Liu, C.S. A modified collocation Trefftz method for the inverse Cauchy problem of Laplace equation. Eng. Anal. Bound. Elem. 2008, 32, 778–785. [Google Scholar] [CrossRef]
- Lee, W.M.; Chen, J.T. Scattering of flexural wave in a thin plate with multiple circular holes by using the multipole Trefftz method. Int. J. Solid Struct. 2010, 47, 1118–1129. [Google Scholar] [CrossRef]
- Liu, C.S.; Atluri, S.N. Numerical solution of the Laplacian Cauchy problem by using a better postconditioning collocation Trefftz method. Eng. Anal. Bound. Elem. 2013, 37, 74–83. [Google Scholar] [CrossRef]
- Liu, M.B.; Liu, G.R. Smoothed Particle Hydrodynamics (SPH): An Overview and Recent Developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef]
- Xu, R.; Stansby, P.; Laurence, D. Accuracy and stability in incompressible SPH (ISPH) based on the projection method and a new approach. J. Comput. Phys. 2009, 228, 6703–6725. [Google Scholar] [CrossRef]
- Lee, E.S.; Moulinec, C.; Xu, R.; Violeau, D.; Laurence, D.; Stansby, P. Comparisons of weakly compressible and truly incompressible algorithms for the SPH mesh free particle method. J. Comput. Phys. 2008, 227, 8417–8436. [Google Scholar] [CrossRef]
- Hu, X.Y.; Adams, N.A. An incompressible multi-phase SPH method. J. Comput. Phys. 2007, 227, 264–278. [Google Scholar] [CrossRef]
- Hu, X.Y.; Adams, N.A. A multi-phase SPH method for macroscopic and mesoscopic flows. J. Comput. Phys. 2006, 213, 844–861. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Rogers, B.D. Numerical modeling of water waves with the SPH method. Coast. Eng. 2006, 53, 141–147. [Google Scholar] [CrossRef]
- Sarler, B. Solution of potential flow problems by the modified method of fundamental solutions: Formulations with the single layer and the double layer fundamental solutions. Eng. Anal. Bound. Elem. 2009, 33, 1374–1382. [Google Scholar] [CrossRef]
- Yan, L.; Fu, C.L.; Yang, F.L. The method of fundamental solutions for the inverse heat source problem. Eng. Anal. Bound. Elem. 2008, 32, 216–222. [Google Scholar] [CrossRef]
- Wei, T.; Hon, Y.C.; Ling, L. Method of fundamental solutions with regularization techniques for Cauchy problems of elliptic operators. Eng. Anal. Bound. Elem. 2007, 31, 373–385. [Google Scholar] [CrossRef]
- Chen, C.S.; Cho, H.A.; Golberg, M.A. Some comments on the ill-conditioning of the method of fundamental solutions. Eng. Anal. Bound. Elem. 2006, 30, 405–410. [Google Scholar] [CrossRef]
- Young, D.L.; Jane, S.J.; Fan, C.M.; Murugesan, K.; Tsai, C.C. The method of fundamental solutions for 2D and 3D Stokes problems. J. Comput. Phys. 2006, 211, 1–8. [Google Scholar] [CrossRef]
- Benito, J.; Ureña, F.; Gavete, L. Influence of several factors in the generalized finite difference method. Appl. Math. Model. 2001, 25, 1039–1053. [Google Scholar] [CrossRef]
- Benito, J.; Ureña, F.; Gavete, L. Solving parabolic and hyperbolic equations by the generalized finite difference method. J. Comput. Appl. Math. 2007, 209, 208–233. [Google Scholar] [CrossRef]
- Benito, J.; Ureña, F.; Gavete, L.; Salete, E.; Ureña, M. Implementations with generalized finite differences of the displacements and velocity-stress formulations of seismic wave propagation problem. Appl. Math. Model. 2017, 52, 1–14. [Google Scholar] [CrossRef]
- Benito, J.; García, A.; Gavete, L.; Negreanu, M.; Ureña, F.; Vargas, A. On the numerical solution to a parabolic-elliptic system with chemotactic and periodic terms using Generalized Finite Differences. Eng. Anal. Bound. Elem. 2020, 113, 181–190. [Google Scholar] [CrossRef]
- Chan, H.F.; Fan, C.M.; Kuo, C.W. Generalized finite difference method for solving two-dimensional non-linear obstacle problems. Eng. Anal. Bound. Elem. 2013, 37, 1189–1196. [Google Scholar] [CrossRef]
- Gu, Y.; Lei, J.; Fan, C.M.; He, X.Q. The generalized finite difference method for an inverse time-dependent source problem associated with three-dimensional heat equation. Eng. Anal. Bound. Elem. 2018, 91, 73–81. [Google Scholar] [CrossRef]
- Lei, J.; Xu, Y.; Gu, Y.; Fan, C.M. The generalized finite difference method for in-plane crack problems. Eng. Anal. Bound. Elem. 2019, 98, 147–156. [Google Scholar] [CrossRef]
- Zhang, T.; Ren, Y.F.; Yang, Z.Q.; Fan, C.M.; Li, P.W. Application of generalized finite difference method to propagation of nonlinear water waves in numerical wave flume. Ocean Eng. 2016, 123, 278–290. [Google Scholar] [CrossRef]
- Zhang, T.; Ren, Y.F.; Fan, C.M.; Li, P.W. Simulation of two-dimensional sloshing phenomenon by generalized finite difference method. Eng. Anal. Bound. Elem. 2016, 63, 82–91. [Google Scholar] [CrossRef]
- Zhang, T.; Lin, Z.H.; Huang, G.Y.; Fan, C.M.; Li, P.W. Solving Boussinesq equations with a meshless finite difference method. Ocean Eng. 2020, 198, 106957. [Google Scholar] [CrossRef]
- Fu, Z.J.; Xie, Z.Y.; Ji, S.Y.; Tsai, C.C.; Li, A.L. Meshless generalized finite difference method for water wave interactions with multiple-bottom-seated-cylinder-array structures. Ocean Eng. 2020, 195, 106736. [Google Scholar] [CrossRef]
- Koo, W.; Kim, M. Fully nonlinear wave-body interactions with surface-piercing bodies. Ocean Eng. 2007, 34, 1000–1012. [Google Scholar] [CrossRef]
- Maruo, H. On the Increase of the Resistance of a Ship in Rough Seas. J. Zosen Kiokai 1960, 1960, 5–13. [Google Scholar] [CrossRef]
- Nojiri, N.; Murayama, K. A study on the drift force on two-dimensional floating body in regular waves. Trans. West-Jpn. Soc. Nav. Archit. 1975, 51, 131–152. [Google Scholar]
- Tanizawa, K.; Minami, M. On the accuracy of NWT for radiation and diffraction problem. In Proceedings of the 6th Symposium on Nonlinear and Free-Surface Flow; 1998. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | N | t | |||
|---|---|---|---|---|---|
| No.01 | 280,380 | 15 T | |||
| No.02 | 280,380 | 15 T | |||
| No.03 | 280,380 | 15 T | |||
| No.04 | 345,462 | 15 T | |||
| No.05 | 437,616 | 15 T |
| Case | Wave Period (s) | Wave Frequency (rad/s) | Wave Length (m) | Wave Steepness | ||
|---|---|---|---|---|---|---|
| No.01 | ||||||
| No.02 | ||||||
| No.03 | ||||||
| No.04 | ||||||
| No.05 | ||||||
| No.06 | ||||||
| No.07 | ||||||
| No.08 | ||||||
| No.09 | ||||||
| No.10 | ||||||
| No.11 | ||||||
| No.12 | ||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Lyu, H.; Fan, C.-M.; Chen, J.-H.; Chu, C.-N.; Gu, J. Wave-Structure Interaction for a Stationary Surface-Piercing Body Based on a Novel Meshless Scheme with the Generalized Finite Difference Method. Mathematics 2020, 8, 1147. https://doi.org/10.3390/math8071147
Huang J, Lyu H, Fan C-M, Chen J-H, Chu C-N, Gu J. Wave-Structure Interaction for a Stationary Surface-Piercing Body Based on a Novel Meshless Scheme with the Generalized Finite Difference Method. Mathematics. 2020; 8(7):1147. https://doi.org/10.3390/math8071147
Chicago/Turabian StyleHuang, Ji, Hongguan Lyu, Chia-Ming Fan, Jiahn-Hong Chen, Chi-Nan Chu, and Jiayang Gu. 2020. "Wave-Structure Interaction for a Stationary Surface-Piercing Body Based on a Novel Meshless Scheme with the Generalized Finite Difference Method" Mathematics 8, no. 7: 1147. https://doi.org/10.3390/math8071147
APA StyleHuang, J., Lyu, H., Fan, C.-M., Chen, J.-H., Chu, C.-N., & Gu, J. (2020). Wave-Structure Interaction for a Stationary Surface-Piercing Body Based on a Novel Meshless Scheme with the Generalized Finite Difference Method. Mathematics, 8(7), 1147. https://doi.org/10.3390/math8071147