Tube-Based Taut String Algorithms for Total Variation Regularization


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (a)
- The proposed geometrical description helps us to speed-up TV regularization processing by dividing tubes into subtubes and then using parallel computing.
- (b)
- Two methods for dividing a tube into subtubes are proposed; that is, exact tube dividing and fixed tube dividing.
- (c)
- The concept of a relatively convex tube is introduced and its properties are derived. It is shown that tubes corresponding to the 2D isotropic TV regularization for radially symmetrical functions are relatively convex.
- (d)
- A relationship between the geometric tube characteristics and the properties of exact solutions to the TV variational problem is found.
2. Discrete TV Regularization with Generalized Functionals
2.1. Reduction of Variational Problem to a System of Equations
2.2. The System of Equations Represented by Cumulative Sums
2.3. Structure and Types of Tubes
2.4. Properties of the Solution of the Obtained System of Equations
- (1)
- L lies inside the corresponding tube;
- (2)
- L passes through the interior points of vertical segments as a straight line;
- (3)
- L jumps up only at the top boundary of the tube;
- (4)
- L jumps down only at the bottom boundary of the tube.
2.5. The Extremal Curve L as a Piecewise Linear Curve of the Minimum Length in a Tube
3. Tube-Based Taut String Algorithm for Total Variation Regularization
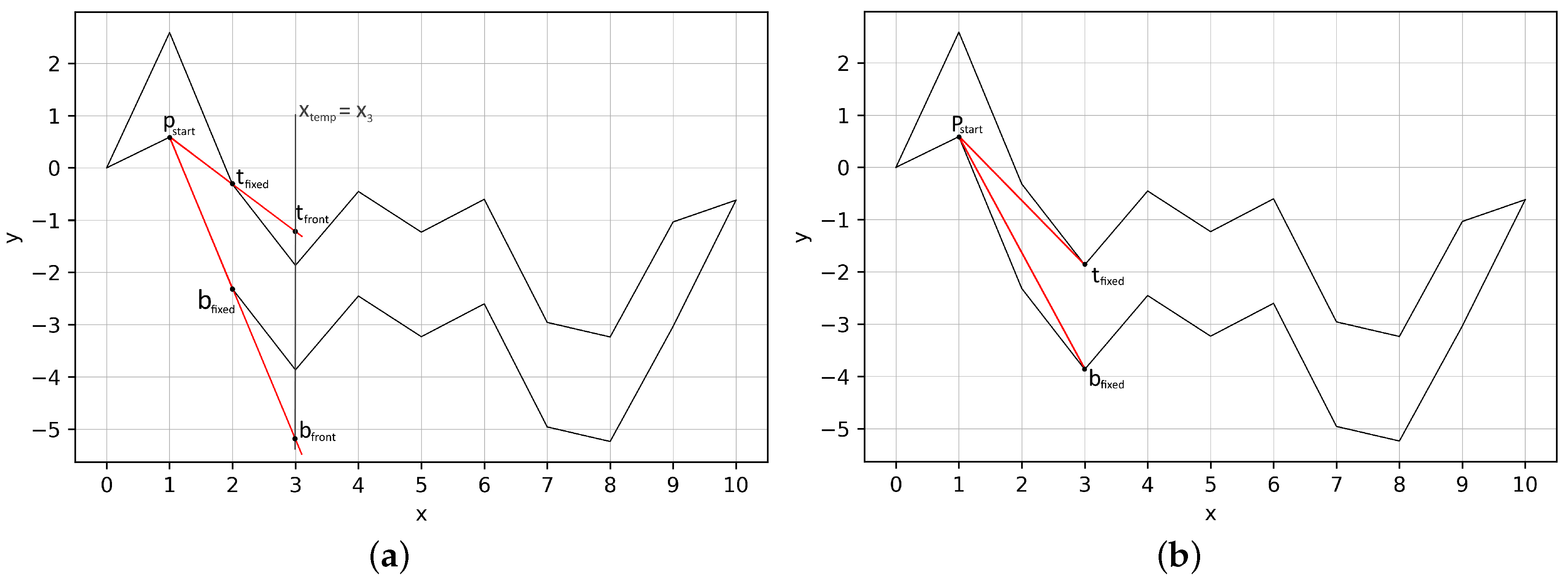
3.1. Cone Scanning Algorithm
- (1)
- if then the process of constructing the cone stops, and we draw a segment between the vertices and ;
- (2)
- if then the process of constructing the cone stops, and we draw a segment between the vertices and ;
- (3)
- if the parameter , then the process of constructing the cone stops, and we draw a segment from the vertex to the last vertex of the tube;
- (4)
- if the steps 1, 2 and 3 are not fulfilled, then we consider the inequality , if the inequality holds, we make correction of the cone , if inequality is satisfied then we make correction of the cone .
3.2. General Algorithm for Constructing a Taut String
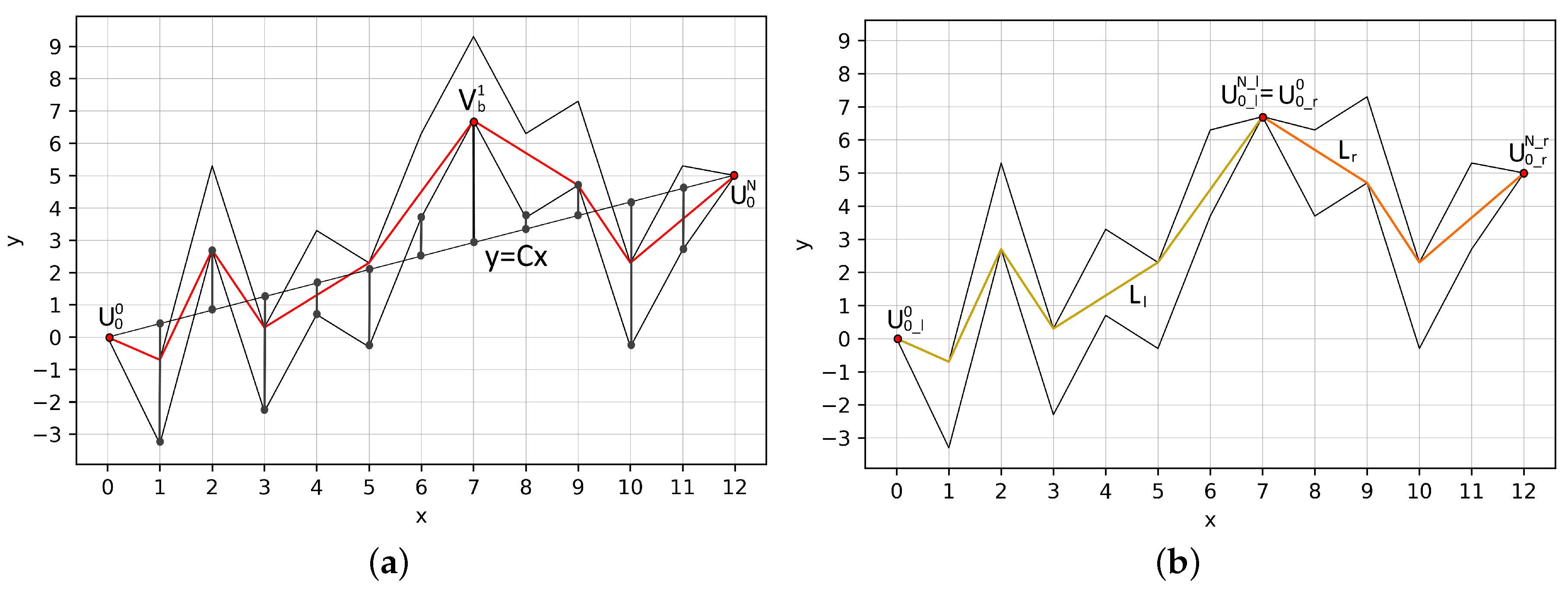
4. Dividing a Tube into Subtubes
4.1. Exact Dividing of a Tube
- (1)
- the dividing vertex can be placed near first or last tube vertices;
- (2)
- it necessary to pass through all discrete functions to find the dividing vertex.
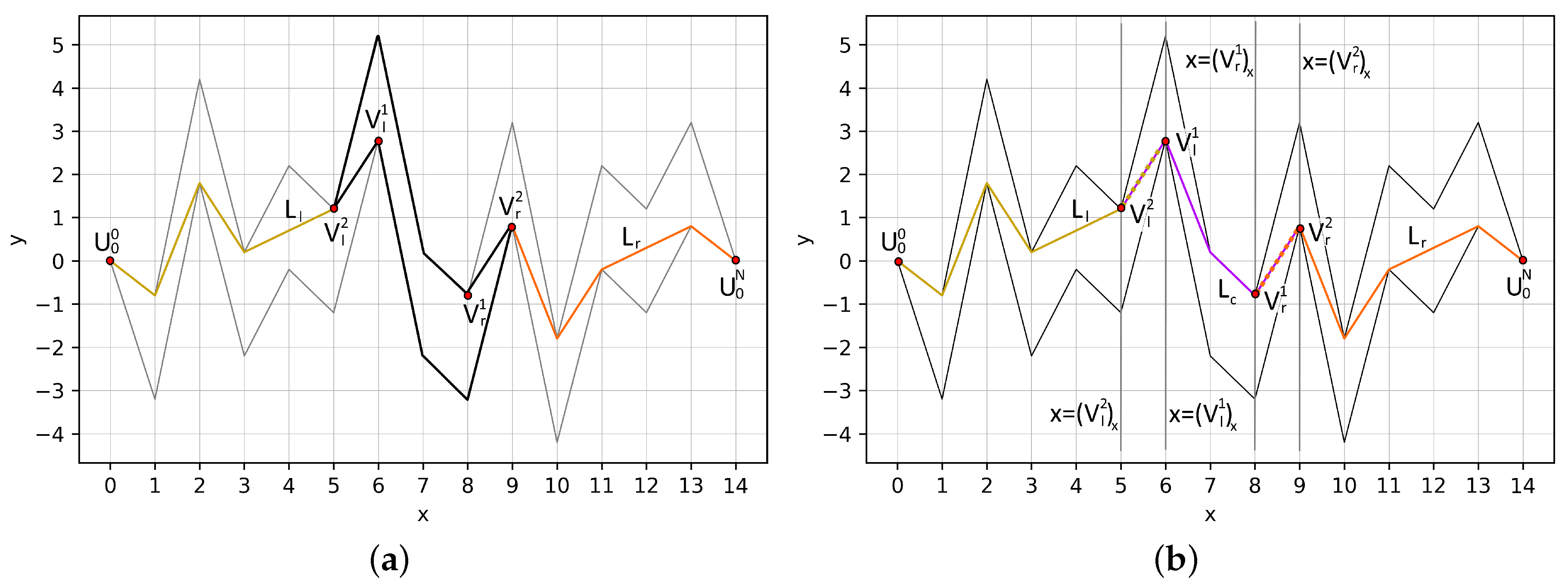
4.2. Fixed Position Dividing a Tube
4.3. Computer Simulation
5. Relatively Convex Tubes and Their Properties
5.1. Intervals of Constancy of the Extremal Function
5.2. Jumps of the Functions and
5.3. Semigroup Property of Exact Solutions
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rudin, L.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Physica D 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Little, M.; Jones, N. Generalized methods and solvers for noise removal from piecewise constant signals. I. Background theory & II. New methods. Proc. R. Soc. A 2011, 467, 3088–3114. [Google Scholar]
- Acar, R.; Vogel, C. Analysis of bounded variation penalty methods for ill-posed problems. Inverse Probl. 1994, 10, 1217–1229. [Google Scholar] [CrossRef]
- Allard, W. Total variation regularization for image denoising I. Geometric theory. SIAM J. Math. Anal. 2008, 39, 1150–1190. [Google Scholar] [CrossRef]
- Allard, W. Total variation regularization for image denoising, II. Examples. SIAM J. Math. Anal. 2008, 1, 400–417. [Google Scholar] [CrossRef]
- Allard, W. Total variation regularization for image denoising, III. Examples. SIAM J. Imaging Sci. 2009, 2, 532–568. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]
- Shang, Y.; Ye, Y. Fixed-Time Group Tracking Control With Unknown Inherent Nonlinear Dynamics. IEEE Access 2017, 5, 12833–12842. [Google Scholar] [CrossRef]
- Shang, Y.; Ye, Y. Leader-Follower Fixed-Time Group Consensus Control of Multiagent Systems under Directed Topology. Complexity 2017, 2017, 3465076:1–3465076:9. [Google Scholar] [CrossRef]
- Meyer, Y. Oscillating Patterns in Image Processing and Nonlinear Evolution Equations: The Fifteenth Dean Jacqueline B. Lewis Memorial Lectures; American Mathematical Soc.: Providence, RI, USA, 2001; Volume 22. [Google Scholar]
- Chambolle, A.; Duval, V.; Peyre, G.; Poon, C. Geometric properties of solutions to the total variation denoising problem. arXiv 2016, arXiv:1602.00087. [Google Scholar] [CrossRef]
- Caselles, V.; Chambolle, A.; Novaga, M. The discontinuity set of solutions of the TV denoising problem and some extensions. Multiscale Model. Simul. 2007, 6, 879–894. [Google Scholar] [CrossRef]
- Ring, W. Structural properties of solutions to total variation regularization problems. ESAIM Math. Model. Numer. Anal. 2000, 34, 799–810. [Google Scholar] [CrossRef]
- Chambolle, A.; Pock, T. An introduction to continuous optimization for imaging. Acta Numer. 2016, 25, 161–319. [Google Scholar] [CrossRef]
- Davies, P.; Kovac, P. Local extremes, runs, strings and multiresolution. Ann. Statist. 2001, 29, 1–65. [Google Scholar] [CrossRef]
- Johnson, N. A dynamic programming algorithm for the fused Lasso and l0-segmentation. J. Comput. Graph. Stat. 2013, 22, 246–260. [Google Scholar] [CrossRef]
- Kolmogorov, V.; Pock, T.; Rolinek, M. Total variation on a tree. SIAM J. Imaging Sci. 2016, 9, 605–636. [Google Scholar] [CrossRef]
- Condat, L. A direct algorithm for 1-D Total Variation Denoising. IEEE Signal Process. Lett. 2013, 20, 1054–1057. [Google Scholar] [CrossRef]
- Barbero, A.; Sra, S. Modular proximal optimization for multidimensional total-variation regularization. arXiv 2017, arXiv:1411.0589v330. [Google Scholar]
- Barbero, A.; Sra, S. Proximal Optimization for Multidimensional Total-Variation Regularization. J. Mach. Learn. Res. 2018, 19, 1–82. [Google Scholar]
- Makovetskii, A.; Voronin, S.; Kober, V. A generalized Condat’s algorithm of 1D total variation regularization. Appl. Digit. Image Process. XL 2017, 10396, 103962K. [Google Scholar]
- Makovetskii, A.; Voronin, S.; Kober, V. A fast one dimensional total variation regularization algorithm. CEUR Workshop Proc. 2017, 190, 176–179. [Google Scholar]
- Makovetskii, A.; Voronin, S.; Kober, V. A fast total variation regularization algorithm for 2D piecewise constant radially symmetric functions. J. Phys. Conf. Ser. 2018, 1096, 012041. [Google Scholar] [CrossRef]
- Kober, V.; Makovetskii, A.; Voronin, S.; Karnaukhov, V. A Fast Algorithm of Regularization of the Total Variation for the Class of Radially Symmetrical Functions. J. Commun. Technol. Electron. 2019, 64, 1500–1507. [Google Scholar] [CrossRef]
- Strong, D.; Chan, T. Edge-preserving and scale-dependent properties of total variation regularization. Inverse Probl. 2003, 19, 165–187. [Google Scholar] [CrossRef]
- Bauschke, H.P.; Combettes, L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: New York, NY, USA, 2011. [Google Scholar]
- Makovetskii, A.; Voronin, S.; Kober, V. Explicit solutions of one-dimensional total variation problem. Proc. SPIE 2015, 9599, 959926-1. [Google Scholar]
- Voronin, S.; Makovetskii, A.; Kober, V.; Karnauhov, V. Properties of exact solutions of the total variation regularization functions of one variable. J. Commun. Technol. Electron. 2015, 60, 1356–1359. [Google Scholar] [CrossRef]
- Makovetskii, A.; Voronin, S.; Kober, V. An efficient algorithm for total variation denoising. Proc. Int. Conf. Anal. Images Soc. Netw. Texts CCIS 2017, 661, 326–337. [Google Scholar]
- Jalalzai, K. Some remarks on the staircasing phenomenon in total variation-based image denoising. J. Math. Imaging Vis. 2015, 54, 256–268. [Google Scholar] [CrossRef]
- Makovetskii, A.; Voronin, S.; Kober, V. Total variation regularization with bounded linear variations. In Proceedings SPIE’s 61 Annual Meeting: Applications of Digital Image Processing XXXIX; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; Volume 9971, p. 99712T-9. [Google Scholar]
- Dumbgen, L.; Kovac, A. Extensions of smoothing via taut strings. Electron. J. Statist. 2009, 3, 41–75. [Google Scholar] [CrossRef]
- Hinterberger, W.; Hintermüller, M.; Kunisch, K.; Von Oehsen, M.; Scherzer, O. Tube methods for BV regularization. J. Math. Imaging Vis. 2003, 19, 219–235. [Google Scholar] [CrossRef]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Makovetskii, A.; Voronin, S.; Kober, V.; Voronin, A. Tube-Based Taut String Algorithms for Total Variation Regularization. Mathematics 2020, 8, 1141. https://doi.org/10.3390/math8071141
Makovetskii A, Voronin S, Kober V, Voronin A. Tube-Based Taut String Algorithms for Total Variation Regularization. Mathematics. 2020; 8(7):1141. https://doi.org/10.3390/math8071141
Chicago/Turabian StyleMakovetskii, Artyom, Sergei Voronin, Vitaly Kober, and Aleksei Voronin. 2020. "Tube-Based Taut String Algorithms for Total Variation Regularization" Mathematics 8, no. 7: 1141. https://doi.org/10.3390/math8071141
APA StyleMakovetskii, A., Voronin, S., Kober, V., & Voronin, A. (2020). Tube-Based Taut String Algorithms for Total Variation Regularization. Mathematics, 8(7), 1141. https://doi.org/10.3390/math8071141