Numerical Scheme for Solving Time–Space Vibration String Equation of Fractional Derivative



{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
3. A Scheme of the One-Dimensional Fractional Vibration Equation
4. Convergence and Stability Analysis of Scheme
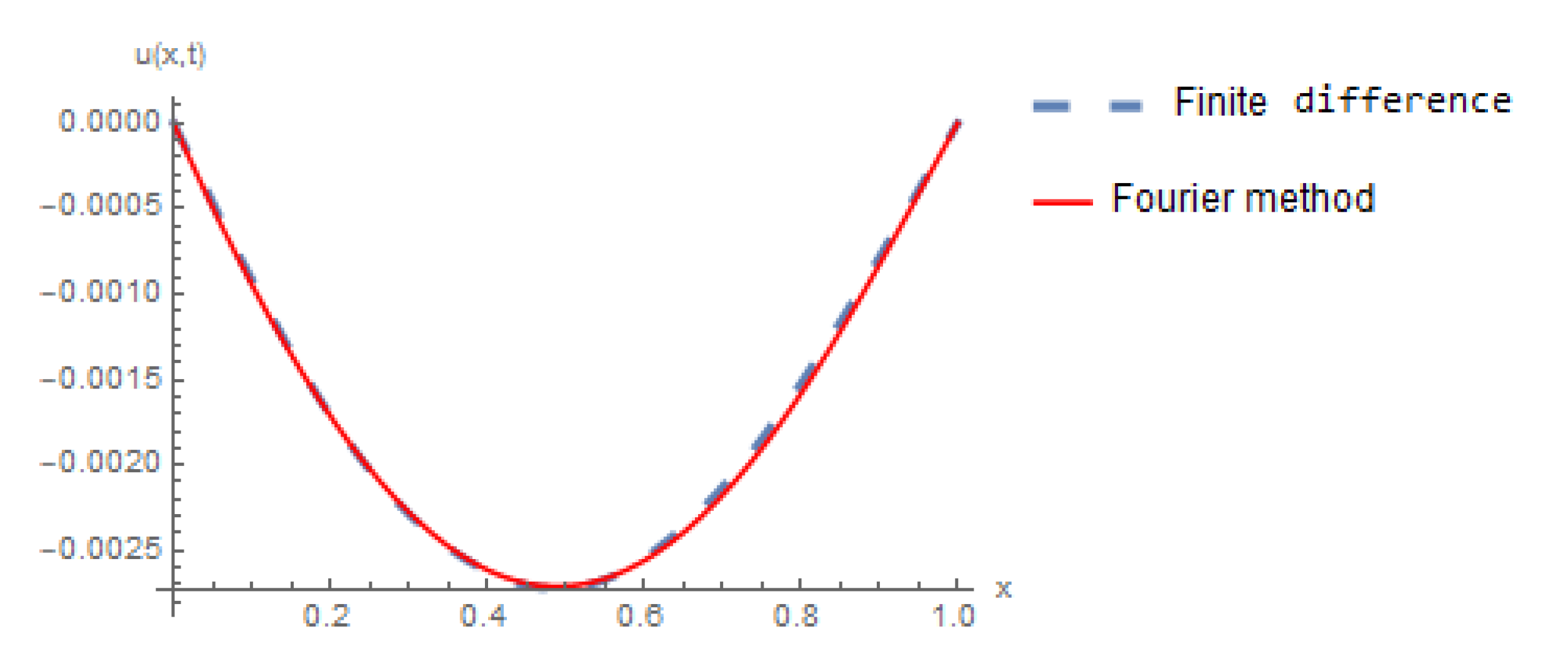
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Davis, H.T. The Theory of Linear Operators; Myers Press: Bloomington, IN, USA, 2008. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, A.T. Advances in Fractional Calculus. In Heoretical Developments and Applications in Physics and Engineering; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar]
- Martínez-García, M.; Gordon, T.; Shu, L. Extended Crossover Model for Human-Control of Fractional Order Plants. IEEE Access 2017, 5, 27622–27635. [Google Scholar] [CrossRef]
- Martínez-García, M.; Zhang, Y.; Gordon, T. Memory Pattern Identification for Feedback Tracking Control in Human-Machine Systems. Hum. Factors 2019. [Google Scholar] [CrossRef]
- Stamova, I.; Gani, S. Functional and Impulsive Differential Equations of Fractional Order: Qualitative Analysis and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Luchko, Y. Subordination principles for the multi-dimensional space-time fractional diffusion wave equations. Theor. Probab. Math. Statist. 2019, 98, 127–147. [Google Scholar] [CrossRef]
- Shallal, M.A.; Jabbar, H.N.; Ali, K.K. Analytical solution for the space-time fractional Klein-Gordon and coupled conformable Boussinesq equations. Results Phys. 2018, 8, 372–378. [Google Scholar] [CrossRef]
- Luchko, Y.; Goren, R.F. An operationl method for solving fractional differential equations with the caputo derivatives. Acta Math. Vietnam. 1999, 2, 207–233. [Google Scholar]
- Aleroev, T.S.; Kekharsaeva, E.R. Boundary value problems for differential equations with fractional derivatives. Integr. Transf. Spec. 2017, 12, 900–908. [Google Scholar] [CrossRef]
- Atangana, A. Fractional Operators With Constant and Variable Order with Application to Geo-Hydrology; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Huang, J.F.; Arshad, S.; Jiao, Y.D.; Tang, Y.F. Convolution quadrature methods for time-space fractional nonlinear diffusion wave equations. East Asian J. Appl. Math. 2019, 9, 538–557. [Google Scholar] [CrossRef]
- Lubich, C. Discretized fractional calculus. SIAM J. Math. Anal. 1986, 17, 704–719. [Google Scholar] [CrossRef]
- Chen, H.; Lu, S.J.; Chen, W.P. A unified numerical scheme for the multi-term time fractional diffusion and diffusion wave equations with variable coefficients. J. Comput. Appl. Math. 2018, 330, 380–397. [Google Scholar] [CrossRef]
- Tian, W.Y.; Zhou, H.; Deng, W.H. A class of second order difference approximations for solving space fractional diffusion equations. Math. Comput. 2015, 84, 1703–1727. [Google Scholar] [CrossRef]
- Sun, Z.Z. The Method of Order Reduction and Its Application to the Numerical Solutions of Partial Differential Equations; Science Press: Beijing, China, 2009. [Google Scholar]
- Li, C.P.; Zeng, F.Z. Numerical Methods for Fractional Calculu; Chapman and Hall/CRC: New York, NY, USA, 2015. [Google Scholar]
- Wang, P.D.; Huang, C.M. An energy conservative difference scheme for the nonlinear fractional Schrödinger equations. J. Comput. Phys. 2015, 293, 238–251. [Google Scholar] [CrossRef]
- Aleroeva, H.; Aleroev, T.S. Some applications of fractional calculus. IOP Conf. Ser. Mater. Sci. Eng. 2020, 747, 012046. [Google Scholar] [CrossRef]



© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elsayed, A.M.; Orlov, V.N. Numerical Scheme for Solving Time–Space Vibration String Equation of Fractional Derivative. Mathematics 2020, 8, 1069. https://doi.org/10.3390/math8071069
Elsayed AM, Orlov VN. Numerical Scheme for Solving Time–Space Vibration String Equation of Fractional Derivative. Mathematics. 2020; 8(7):1069. https://doi.org/10.3390/math8071069
Chicago/Turabian StyleElsayed, Asmaa M., and Viktor N. Orlov. 2020. "Numerical Scheme for Solving Time–Space Vibration String Equation of Fractional Derivative" Mathematics 8, no. 7: 1069. https://doi.org/10.3390/math8071069
APA StyleElsayed, A. M., & Orlov, V. N. (2020). Numerical Scheme for Solving Time–Space Vibration String Equation of Fractional Derivative. Mathematics, 8(7), 1069. https://doi.org/10.3390/math8071069